水下管道漏油点检测机器人
设计概述:
本次毕业设计为参赛作品,有现成的机器鱼套件,传感器型号为现成的,通过安放传感器检测机器鱼的位置和检测漏油点,做出转弯,直行,减速调整以及通过点亮二极管的方式来报警。须自行设计电源部分,硬件部分的连接和程序控制部分,需画电路图。
一、设计任务
1.可以自主巡线完成规定路线上的寻迹
2.自主检测管道上的模拟漏油点并作出报警,采用发光二极管。
二、场地要求
1. 场地
场地为标准 3m*2m*0.4m 长方形水池,水面高度为 26cm,池底和池壁为湖蓝色
2. 管道
用直径 75mm 白色 PVC 管铺设模拟输油管线,PVC 管铺入水池底部,拐角处使用标准 90 度 PVC 管连接拐角,用直径 3cm 圆形实心黑色标记表示漏油处,共设置 8 个漏油处,随机分布在输油管各处。
三、方案总述
通过传感器检测漏油点,检测机器鱼位置,将信号传入单片机中,通过处理做出相应的调整,直行、减速、转弯,以及漏油点检测,以点亮发光二极管的方式来报警。
传感器安装位置:采用8个红外传感器,每排水平安装4个传感器,共两排,中间四个用于检测漏油点,两边的4个传感器用于检测位置,这样可以更加稳定地检测到漏油位置,保证无误判或漏判。将固定支架杆加长,使结构件两侧可以卡在水管的上面,以保证机器鱼在游动过程不会偏离管道,起到辅助作用。(基本是这样了)
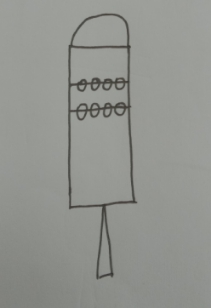
我去看实验室现场的就是这样安装的,安装在鱼的中部,共八个传感器,根据我的理解中间四个为检测漏油点,旁边四个为位置检测。
四、需要硬件
1. 机器鱼:smart tuna-c(固定)(主要的就只是控制它的舵机:(Futaba S3003)
2. 单片机:STM32F103C8T6最小系统板(固定)
3.传感器: E18-D80NK.(固定)
4.发光二极管:没选
5电源部分 :能够充电,体型尽量小,整个设计的东西都要放在机器鱼内。
