|
New Roman"; font-size: 12pt; font-weight: bold;'>Signal-to-Noise Ratio. The accuracy of all radar measurements, as well as the reliable detection of targets depends on the ratio E/No , where E is the total energy of the received signal that is processed by the radar and No is the noise power per unit bandwidth of the receiver. Thus E/No is an important measure of the capability of a radar.
Operation with More Than One Frequency. There may be important benefits when a radar is able to operate at more than one frequency. Frequency agility usually refers to the use of multiple frequencies on a pulse-to-pulse basis. Frequency diversity usually relates to the use of multiple frequencies that are widely separated, sometimes in more than one radar band. Frequency diversity might operate at each frequency simultaneously or almost simultaneously. It has been used in almost all civilian air-traffic control radars. Pulse-to-pulse frequency agility, however, is not compatible with the use of doppler processing (to detect moving targets in clutter), but frequency diversity can be compatible. The frequency range in both agility and in diversity operations is much greater than the inherent bandwidth of a pulse of width t.
Elevation Null Filling. Operation of a radar at a single frequency can result in a lobed structure to the elevation pattern of an antenna due to the interference between the direct signal (radar to target) and the surface-scattered signal (radar to earth��s surface to target). By a lobed structure, we mean that there will be reduced coverage at some elevation angles (nulls) and increased signal strength at other angles (lobes). A change in frequency will change the location of the nulls and lobes so that by operating over a wide frequency range, the nulls in elevation can be filled in, and the radar will be less likely to lose a target echo signal. For example, measurements with a wideband experimental radar known as Senrad, which could operate from 850 to 1400 MHz, showed that when only a single frequency was used, the blip-scan ratio (the experimentally measured single-scan probability of detection) was found to be 0.78 under a particular set of observations. When the radar operated at four different widely separated frequencies, the blip-scan ratio was 0.98��a highly significant increase due to frequency diversity.
Increased Target Detectability. The radar cross section of a complex target such as an aircraft can vary greatly with a change in frequency. At some frequencies, the radar cross section will be small and at others it will be large. If a radar operates at a single frequency, it might result in a small target echo and, therefore, a missed detection. By operating at a number of different frequencies, the cross section will vary and can be small or large; but a successful detection becomes more likely than if only a single frequency were used. This is one reason that almost all air-traffic control radars operate with two frequencies spaced wide enough apart in frequency to insure that target echoes are decorrelated and, therefore, increase the likelihood of detection.
Reduced Effectiveness of Hostile Countermeasures. Any military radar that is suc- cessful can expect a hostile adversary to employ countermeasures to reduce its effectiveness.Operating over a wide range of frequencies makes countermeasures more difficult than if operation is at only one frequency. Against noise jamming, changing frequency in an unpredictable manner over a wide range of frequencies causes the jammer to have to spread its power over a wide frequency range and will, therefore, reduce the hostile jamming signal strength over the bandwidth of the radar signal. Frequency diversity over a wide band also makes it more difficult (but not impossible) for a hostile intercept receiver or an antiradiation missile to detect and locate a radar signal.
The Doppler Shift in Radar. The importance of the doppler frequency shift began to be appreciated for pulse radar shortly after World War II and became an increasingly important factor in many radar applications. Modern radar would be much less interesting or useful if the doppler effect didn��t exist. The doppler frequency shift fd can be written as
fd =2vr/�� = (2 vr cos��)/ �� (1.1)
where vr = v cos �� is the relative velocity of the target (relative to the radar) in m/s, v is the absolute velocity of the target in m/s, �� is the radar wavelength in m, and �� is the angle between the target��s direction and the radar beam. To an accuracy of about 3 percent, the doppler frequency in hertz is approximately equal to vr (kt) divided by �� (m).
The doppler frequency shift is widely used to separate moving targets from stationary clutter, as discussed in Chapters 2 through 5. Such radars are known as MTI (moving target indication), AMTI (airborne MTI), and pulse doppler. All modern airtraffic control radars, all important military ground-based and airborne air-surveillance radars, and all military airborne fighter radars take advantage of the doppler effect. Yet in WWII, none of these pulse radar applications used doppler. The CW (continuous wave) radar also employs the doppler effect for detecting moving targets, but CW radar for this purpose is not as popular as it once was. The HF OTH radar (Chapter 20) could not do its job of detecting moving targets in the presence of large clutter echoes from the earth��s surface without the use of doppler.
Another significant application of radar that depends on the doppler shift is observation of the weather, as in the Nexrad radars of the U.S. National Weather Service (Chapter 19) mentioned earlier in this chapter.
Both the SAR and ISAR can be described in terms of their use of the doppler frequency shift (Chapter 17). The airborne doppler navigator radar is also based on the doppler shift. The use of doppler in a radar generally places greater demands on the stability of the radar transmitter, and it increases the complexity of the signal processing; yet these requirements are willingly accepted in order to achieve the significant benefits offered by doppler. It should also be mentioned that the doppler shift is the key capability of a radar that can measure speed, as by its diligent use by traffic police for maintaining vehicle speed limits and in other velocity measuring applications.
1.4 THE RADER EQUATION
The radar range equation (or radar equation, for short) not only serves the very useful purpose of estimating the range of a radar as a function of the radar characteristics, but also is quite useful as a guide for designing a radar system. The simple form of the radar equation may be written as

The right-hand side has been written as the product of three factors to represent the physical processes that take place. The first factor on the right is the power density at a distance R from a radar that radiates a power Pt from an antenna of gain Gt . The numerator,��, of the second factor is the radar cross section of the target. It has the unit of area (for example, square meters) and is a measure of the energy redirected by the target back in the direction of the radar. The denominator of the second factor accounts for the divergence of the echo signal on its return path back to the radar. The product of the first two factors represents the power per unit area returned to the radar antenna. Note that the radar cross section of a target,�� , is defined by this equation. The receiving antenna of effective area collects a portion Pr of the echo power returned to the radar. If the maximum radar range, Rmax, is defined as occurring when the received signal is equal to the minimum detectable signal of the radar, Smin, the simple form of the radar equation becomes

Generally, most radars use the same antenna for both transmitting and receiving. From antenna theory, there is a relation between the gain Gt of the antenna on transmit and its effective area Ae on receive, which is G t = 4�� A e /�� 2 , where �� is the wavelength of the radar signal. Substituting this into Eq. 1.3 provides two other useful forms of the radar equation (not shown here): one that represents the antenna only by its gain and the other that represents the antenna only by its effective area. The simple form of the radar equation is instructive, but not very useful since it leaves out many things. The minimum detectable signal, Smin, is limited by receiver noise and can be expressed as

In this expression, kToB is the so-called thermal noise from an ideal ohmic conductor, where k = Boltzmann��s constant, To is the standard temperature of 290 K, and B = receiver bandwidth (usually that of the IF stage of the superheterodyne receiver). The product kTo is equal to 4 �� 10−21 W/Hz. To account for the additional noise introduced by a practical (nonideal) receiver, the thermal noise expression is multiplied by the noise figure F n of the receiver, defined as the noise out of a practical receiver to the noise out of an ideal receiver. For a received signal to be detectable, it has to be larger than the receiver noise by a factor denoted here as (S/N)1. This value of signal-to-noise ratio (S/N)1 is that required if only one pulse is present. It has to be large enough to obtain the required probability of false alarm (due to noise crossing the receiver threshold) and the required probability of detection (as can be found in various radar texts3,4). Radars, however, generally process more than one pulse before making a detection decision. We assume the radar waveform is a repetitive series of rectangular- like pulses. These pulses are integrated (added together) before a detection decision is made. To account for these added signals, the numerator of the radar equation is multiplied by a factor nEi (n), where Ei (n) is the efficiency in adding together n pulses. This value can also be found in standard texts.
The power Pt is the peak power of a radar pulse. The average power, Pav , is a better measure of the ability of a radar to detect targets, so it is sometimes inserted into the radar equation using Pt = Pav /fp , where fp is the pulse repetition frequency of the pulse radar and t is the pulse duration. The surface of the earth and the earth��s atmosphere can drastically affect the propagation of electromagnetic waves and change the coverage and capabilities of a radar. In the radar equation, these propagation effects are accounted for by a factor F4 in the numerator of the radar equation, as discussed in Chapter 26. With the above substituted into the simple form of the radar equation we get
In the above equation, it was assumed in its derivation that Bt��1, which is generally applicable in radar. A factor Ls (greater than unity), called the system losses, has been inserted to account for the many ways that loss can occur in a radar. This loss factor can be quite large. If the system loss is ignored, it might result in a very large error in the estimated range predicted by the radar equation. (A loss of from 10 dB to may be 20 dB is not unusual when all radar system loss factors are taken into account.)
Equation 1.5 applies for a radar that observes a target long enough to receive n pulses. More fundamentally, it applies for a radar where the time on target to is equal to n/fp . An example is a tracking radar that continuously observes a single target for a time to . This equation, however, needs to be modified for a surveillance radar that observes an angular volume �� with a revisit time ts . (Air traffic control radars might have a revisit time of from 4 to 12 s.) Thus, a surveillance radar has the additional constraint that it must cover an angular volume �� in a given time ts.The revisittime ts is equal to to(��/��o), where ts = n/fp and ��o, the solid beamwidth of the antenna (steradians), is approximately related to the antenna gain G by G = 4��/��o. Therefore, when n/fp in Eq.1.5 is replaced with its equal 4��t /G��, the radar equation for a surveillance radar is obtained as

The radar designer has little control over the revisit time ts or the angular coverage �� , which are determined mainly by the job the radar has to perform. The radar cross section also is determined by the radar application. If a large range is required of a surveillance radar, the radar must have the necessary value of the product PavAe. For this reason, a common measure of the capability of a surveillance radar is its power-aperture product . Note that the radar frequency does not appear explicitly in the surveillance radar equation. The choice of frequency, however, will enter implicitly in other ways.
Just as the radar equation for a surveillance radar is different from the conventional radar equation of Eq. 1.5 or the simple radar equation of Eq.1.2, each particular application of a radar generally has to employ a radar equation tailored to that specific application. When the radar echoes from land, sea, or weather clutter are greater than the receiver noise, the radar equation has to be modified to account for clutter being the limitation to detection rather than receiver noise. It can happen that the detection capability of a radar might be limited by clutter in some regions of its coverage and be limited by receiver noise in other regions. This can result in two different sets of radar characteristics, one optimized for noise and the other optimized for clutter; and compromises usually have to be made in radar design. A different type of radar equation is also required when the radar capability is limited by hostile noise jamming.
1.5 RADAR FREQUENCY LETTER-BAND
NOMENCLATURE
It is not always convenient to use the exact numerical frequency range over which a particular type of radar operates. With many military radars, the exact operating frequency range of a radar is usually not disclosed. Thus, the use of letters to designate radar operating bands has been very helpful. The IEEE (Institute of Electrical and Electronic Engineers) has officially standardized the radar letter-band nomenclature, as summarized in Table 1.1.
Comments on the table. The International Telecommunications Union (ITU) assigns specific portions of the electromagnetic spectrum for radiolocation (radar) use as shown in the third column, which applies to ITU Region 2 that includes North and South America. Slight differences occur in the other two ITU Regions. Thus an L-band radar can only operate within the frequency range from 1215 MHz to 1400 MHz, and even within this range, there may be restrictions. Some of the indicated ITU bands are restricted in their usage; for example, the band between 4.2 and 4.4 GHz is reserved
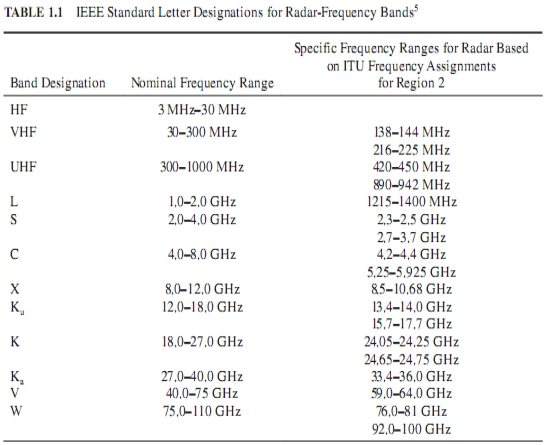 (with few exceptions) for airborne radar altimeters. There are no official ITU allocations for radar in the HF band, but most HF radars share frequencies with other electromagnetic services. The letter-band designation for millimeter wave radars is mm, and there are several frequency bands allocated to radar in this region, but they have not been listed here. Although the official ITU description of millimeter waves is from 30 to 300 GHz, in reality, the technology of radars at Ka band is much closer to the technology of microwave frequencies than to the technology of W band. The millimeter wave radar frequencies are often considered by those who work in this field to have a lower bound of 40 GHz rather than the ��legal�� lower bound of 30 GHz in recognition of the significant difference in technology and applications that is characteristic of millimeter wave radar. Microwaves have not been defined in this standard, but this term generally applies to radars that operate from UHF to K band. The reason that these letter designations might a not be easy for the non-radar engineer to recognize is that they were originally selected to describe the radar bands used in World War II. Secrecy was important at that time so the letters selected to designate the various bands made it hard to guess the frequencies to which they apply. Those who work around radar, however, seldom have a problem with the usage of the radar letter bands. (with few exceptions) for airborne radar altimeters. There are no official ITU allocations for radar in the HF band, but most HF radars share frequencies with other electromagnetic services. The letter-band designation for millimeter wave radars is mm, and there are several frequency bands allocated to radar in this region, but they have not been listed here. Although the official ITU description of millimeter waves is from 30 to 300 GHz, in reality, the technology of radars at Ka band is much closer to the technology of microwave frequencies than to the technology of W band. The millimeter wave radar frequencies are often considered by those who work in this field to have a lower bound of 40 GHz rather than the ��legal�� lower bound of 30 GHz in recognition of the significant difference in technology and applications that is characteristic of millimeter wave radar. Microwaves have not been defined in this standard, but this term generally applies to radars that operate from UHF to K band. The reason that these letter designations might a not be easy for the non-radar engineer to recognize is that they were originally selected to describe the radar bands used in World War II. Secrecy was important at that time so the letters selected to designate the various bands made it hard to guess the frequencies to which they apply. Those who work around radar, however, seldom have a problem with the usage of the radar letter bands.
Other letter bands have been used for describing the electromagnetic spectrum; but they are not suitable for radar and should never be used for radar. One such designation uses the letters A, B, C, etc., originally devised for conducting electronic countermeasure 7 exercises. The IEEE Standard mentioned previously states that these ��are not consistent with radar practice and shall not be used to describe radar-frequency bands.�� Thus, there may be D-band jammers, but never D-band radars.
1.6 EFFECT OF OPERATING FREQUENCY ON RADAR
Radars have been operated at frequencies as low as 2 MHz (just above the AM broadcast band) and as high as several hundred GHz (millimeter wave region). More usually, radar frequencies might be from about 5 MHz to over 95 GHz. This is a very large extent of frequencies, so it should be expected that radar technology, capabilities, and applications will vary considerably depending on the frequency range at which a radar operates. Radars at a particular frequency band usually have different capabilities and characteristics than radars in other frequency bands. Generally, long range is easier to achieve at the lower frequencies because it is easier to obtain high-power transmitters and physically large antennas at the lower frequencies. On the other hand, at the higher radar frequencies, it is easier to achieve accurate measurements of range and location because the higher frequencies provide wider bandwidth (which determines range accuracy and range resolution) as well as narrower beam antennas for a given physical size antenna (which determines angle accuracy and angle resolution). In the following, the applications usually found in the various radar bands are briefly indicated. The differences between adjacent bands, however, are seldom sharp in practice, and overlap in characteristics between adjacent bands is likely.
HF (3 to 30 MHz). The major use of the HF band for radar (Chapter 20) is to detect targets at long ranges (nominally out to 2000 nmi) by taking advantage of the refraction of HF energy by the ionosphere that lies high above the surface of the earth. Radio amateurs refer to this as short-wave propagation and use it to communicate over long distances. The targets for such HF radars might be aircraft, ships, and ballistic missiles, as well as the echo from the sea surface itself that provides information about the direction and speed of the winds that drive the sea.
VHF (30 to 300 MHz). At the beginning of radar development in the 1930s, radars were in this frequency band because these frequencies represented the frontier of radio technology at that time. It is a good frequency for long range air surveillance or detection of ballistic missiles. At these frequencies, the reflection coefficient on scattering from the earth��s surface can be very large, especially over water, so the constructive interference between the direct signal and the surface-reflected signal can increase significantly the range of a VHF radar. Sometimes this effect can almost double the radar��s range. However, when there is constructive interference that increases the range, there can be destructive interference that decreases the range due to the deep nulls in the antenna pattern in the elevation plane. Likewise, the destructive interference can result in poor low-altitude coverage. Detection of moving targets in clutter is often better at the lower frequencies when the radar takes advantage of the doppler frequency shift because doppler ambiguities (that cause blind speeds) are far fewer at low frequencies. VHF radars are not bothered by echoes from rain, but they can be affected by multiple-time-around echoes from meteor ionization and aurora. The radar cross section of aircraft at VHF is generally larger than the radar cross section at higher frequencies. VHF radars frequently cost less compared to radars with the same range performance that operate at higher frequencies.
Although there are many attractive advantages of VHF radars for long-range surveillance, they also have some serious limitations. Deep nulls in elevation and poor low-altitude coverage have been mentioned. The available spectral widths assigned to radar at VHF are small so range resolution is often poor. The antenna beamwidths are usually wider than at microwave frequencies, so there is poor resolution and accuracy in angle. The VHF band is crowded with important civilian services such as TV and FM broadcast, further reducing the availability of spectrum space for radar. External noise levels that can enter the radar via the antenna are higher at VHF than at microwave frequencies. Perhaps the chief limitation of operating radars at VHF is the difficulty of obtaining suitable spectrum space at these crowded frequencies.
In spite of its limitations, the VHF air surveillance radar was widely used by the Soviet Union because it was a large country, and the lower cost of VHF radars made them attractive for providing air surveillance over the large expanse of that country. They have said they produced a large number of VHF air-surveillance radars��some were of very large size and long range, and most were readily transportable. It is interesting to note that VHF airborne intercept radars were widely used by the Germans in World War II. For example, the Lichtenstein SN-2 airborne radar operated from about 60 to over 100 MHz in various models. Radars at such frequencies were not affected by the countermeasure called chaff (also known as window).
UHF (300 to 1000 MHz). Many of the characteristics of radar operating in the VHF region also apply to some extent at UHF. UHF is a good frequency for Airborne Moving Target Indication (AMTI) radar in an Airborne Early Warning Radar (AEW), as discussed in Chapter 3. It is also a good frequency for the operation of long-range radars for the detection and tracking of satellites and ballistic missiles. At the upper portion of this band there can be found long-range shipboard air-surveillance radars and radars (called wind profilers) that measure the speed and direction of the wind.
Ground Penetrating Radar (GPR), discussed in Chapter 21, is an example of what is called an ultrawideband (UWB) radar. Its wide signal bandwidth sometimes covers both the VHF and UHF bands. Such a radar��s signal bandwidth might extend, for instance, from 50 to 500 MHz. A wide bandwidth is needed in order to obtain good range resolution. The lower frequencies are needed to allow the propagation of radar energy into the ground. (Even so, the loss in propagating through typical soil is so high that the ranges of a simple mobile GPR might be only a few meters.) Such ranges are suitable for locating buried power lines and pipe lines, as well as buried objects. If a radar is to see targets located on the surface but within foliage, similar frequencies are needed as for the GPR.
L band (1.0 to 2.0 GHz). This is the preferred frequency band for the operation of long-range (out to 200 nmi) air-surveillance radars. The Air Route Surveillance Radar (ARSR) used for long range air-traffic control is a good example. As one goes up in frequency, the effect of rain on performance begins to become significant, so the radar designer might have to worry about reducing the effect of rain at L-band and higher frequencies. This frequency band has also been attractive for the long-range detection of satellites and defense against intercontinental ballistic missiles.
S band (2.0 to 4.0 GHz). Signal-to-Noise Ratio. The accuracy of all radar measurements, as well as the reliable detection of targets depends on the ratio E/No , where E is the total energy of the received signal that is processed by the radar and No is the noise power per unit bandwidth of the receiver. Thus E/No is an important measure of the capability of a radar.
Operation with More Than One Frequency. There may be important benefits when a radar is able to operate at more than one frequency. Frequency agility usually refers to the use of multiple frequencies on a pulse-to-pulse basis. Frequency diversity usually relates to the use of multiple frequencies that are widely separated, sometimes in more than one radar band. Frequency diversity might operate at each frequency simultaneously or almost simultaneously. It has been used in almost all civilian air-traffic control radars. Pulse-to-pulse frequency agility, however, is not compatible with the use of doppler processing (to detect moving targets in clutter), but frequency diversity can be compatible. The frequency range in both agility and in diversity operations is much greater than the inherent bandwidth of a pulse of width t.
Elevation Null Filling. Operation of a radar at a single frequency can result in a lobed structure to the elevation pattern of an antenna due to the interference between the direct signal (radar to target) and the surface-scattered signal (radar to earth��s surface to target). By a lobed structure, we mean that there will be reduced coverage at some elevation angles (nulls) and increased signal strength at other angles (lobes). A change in frequency will change the location of the nulls and lobes so that by operating over a wide frequency range, the nulls in elevation can be filled in, and the radar will be less likely to lose a target echo signal. For example, measurements with a wideband experimental radar known as Senrad, which could operate from 850 to 1400 MHz, showed that when only a single frequency was used, the blip-scan ratio (the experimentally measured single-scan probability of detection) was found to be 0.78 under a particular set of observations. When the radar operated at four different widely separated frequencies, the blip-scan ratio was 0.98��a highly significant increase due to frequency diversity.
Increased Target Detectability. The radar cross section of a complex target such as an aircraft can vary greatly with a change in frequency. At some frequencies, the radar cross section will be small and at others it will be large. If a radar operates at a single frequency, it might result in a small target echo and, therefore, a missed detection. By operating at a number of different frequencies, the cross section will vary and can be small or large; but a successful detection becomes more likely than if only a single frequency were used. This is one reason that almost all air-traffic control radars operate with two frequencies spaced wide enough apart in frequency to insure that target echoes are decorrelated and, therefore, increase the likelihood of detection.
Reduced Effectiveness of Hostile Countermeasures. Any military radar that is suc- cessful can expect a hostile adversary to employ countermeasures to reduce its effectiveness.Operating over a wide range of frequencies makes countermeasures more difficult than if operation is at only one frequency. Against noise jamming, changing frequency in an unpredictable manner over a wide range of frequencies causes the jammer to have to spread its power over a wide frequency range and will, therefore, reduce the hostile jamming signal strength over the bandwidth of the radar signal. Frequency diversity over a wide band also makes it more difficult (but not impossible) for a hostile intercept receiver or an antiradiation missile to detect and locate a radar signal.
The Doppler Shift in Radar. The importance of the doppler frequency shift began to be appreciated for pulse radar shortly after World War II and became an increasingly important factor in many radar applications. Modern radar would be much less interesting or useful if the doppler effect didn��t exist. The doppler frequency shift fd can be written as
fd =2vr/�� = (2 vr cos��)/ �� (1.1)
where vr = v cos �� is the relative velocity of the target (relative to the radar) in m/s, v is the absolute velocity of the target in m/s, �� is the radar wavelength in m, and �� is the angle between the target��s direction and the radar beam. To an accuracy of about 3 percent, the doppler frequency in hertz is approximately equal to vr (kt) divided by �� (m).
The doppler frequency shift is widely used to separate moving targets from stationary clutter, as discussed in Chapters 2 through 5. Such radars are known as MTI (moving target indication), AMTI (airborne MTI), and pulse doppler. All modern airtraffic control radars, all important military ground-based and airborne air-surveillance radars, and all military airborne fighter radars take advantage of the doppler effect. Yet in WWII, none of these pulse radar applications used doppler. The CW (continuous wave) radar also employs the doppler effect for detecting moving targets, but CW radar for this purpose is not as popular as it once was. The HF OTH radar (Chapter 20) could not do its job of detecting moving targets in the presence of large clutter echoes from the earth��s surface without the use of doppler.
Another significant application of radar that depends on the doppler shift is observation of the weather, as in the Nexrad radars of the U.S. National Weather Service (Chapter 19) mentioned earlier in this chapter.
Both the SAR and ISAR can be described in terms of their use of the doppler frequency shift (Chapter 17). The airborne doppler navigator radar is also based on the doppler shift. The use of doppler in a radar generally places greater demands on the stability of the radar transmitter, and it increases the complexity of the signal processing; yet these requirements are willingly accepted in order to achieve the significant benefits offered by doppler. It should also be mentioned that the doppler shift is the key capability of a radar that can measure speed, as by its diligent use by traffic police for maintaining vehicle speed limits and in other velocity measuring applications.
1.4 THE RADER EQUATION
The radar range equation (or radar equation, for short) not only serves the very useful purpose of estimating the range of a radar as a function of the radar characteristics, but also is quite useful as a guide for designing a radar system. The simple form of the radar equation may be written as
The right-hand side has been written as the product of three factors to represent the physical processes that take place. The first factor on the right is the power density at a distance R from a radar that radiates a power Pt from an antenna of gain Gt . The numerator,��, of the second factor is the radar cross section of the target. It has the unit of area (for example, square meters) and is a measure of the energy redirected by the target back in the direction of the radar. The denominator of the second factor accounts for the divergence of the echo signal on its return path back to the radar. The product of the first two factors represents the power per unit area returned to the radar antenna. Note that the radar cross section of a target,�� , is defined by this equation. The receiving antenna of effective area collects a portion Pr of the echo power returned to the radar. If the maximum radar range, Rmax, is defined as occurring when the received signal is equal to the minimum detectable signal of the radar, Smin, the simple form of the radar equation becomes
Generally, most radars use the same antenna for both transmitting and receiving. From antenna theory, there is a relation between the gain Gt of the antenna on transmit and its effective area Ae on receive, which is G t = 4�� A e /�� 2 , where �� is the wavelength of the radar signal. Substituting this into Eq. 1.3 provides two other useful forms of the radar equation (not shown here): one that represents the antenna only by its gain and the other that represents the antenna only by its effective area. The simple form of the radar equation is instructive, but not very useful since it leaves out many things. The minimum detectable signal, Smin, is limited by receiver noise and can be expressed as
In this expression, kToB is the so-called thermal noise from an ideal ohmic conductor, where k = Boltzmann��s constant, To is the standard temperature of 290 K, and B = receiver bandwidth (usually that of the IF stage of the superheterodyne receiver). The product kTo is equal to 4 �� 10−21 W/Hz. To account for the additional noise introduced by a practical (nonideal) receiver, the thermal noise expression is multiplied by the noise figure F n of the receiver, defined as the noise out of a practical receiver to the noise out of an ideal receiver. For a received signal to be detectable, it has to be larger than the receiver noise by a factor denoted here as (S/N)1. This value of signal-to-noise ratio (S/N)1 is that required if only one pulse is present. It has to be large enough to obtain the required probability of false alarm (due to noise crossing the receiver threshold) and the required probability of detection (as can be found in various radar texts3,4). Radars, however, generally process more than one pulse before making a detection decision. We assume the radar waveform is a repetitive series of rectangular- like pulses. These pulses are integrated (added together) before a detection decision is made. To account for these added signals, the numerator of the radar equation is multiplied by a factor nEi (n), where Ei (n) is the efficiency in adding together n pulses. This value can also be found in standard texts.
The power Pt is the peak power of a radar pulse. The average power, Pav , is a better measure of the ability of a radar to detect targets, so it is sometimes inserted into the radar equation using Pt = Pav /fp , where fp is the pulse repetition frequency of the pulse radar and t is the pulse duration. The surface of the earth and the earth��s atmosphere can drastically affect the propagation of electromagnetic waves and change the coverage and capabilities of a radar. In the radar equation, these propagation effects are accounted for by a factor F4 in the numerator of the radar equation, as discussed in Chapter 26. With the above substituted into the simple form of the radar equation we get
In the above equation, it was assumed in its derivation that Bt��1, which is generally applicable in radar. A factor Ls (greater than unity), called the system losses, has been inserted to account for the many ways that loss can occur in a radar. This loss factor can be quite large. If the system loss is ignored, it might result in a very large error in the estimated range predicted by the radar equation. (A loss of from 10 dB to may be 20 dB is not unusual when all radar system loss factors are taken into account.)
Equation 1.5 applies for a radar that observes a target long enough to receive n pulses. More fundamentally, it applies for a radar where the time on target to is equal to n/fp . An example is a tracking radar that continuously observes a single target for a time to . This equation, however, needs to be modified for a surveillance radar that observes an angular volume �� with a revisit time ts . (Air traffic control radars might have a revisit time of from 4 to 12 s.) Thus, a surveillance radar has the additional constraint that it must cover an angular volume �� in a given time ts.The revisittime ts is equal to to(��/��o), where ts = n/fp and ��o, the solid beamwidth of the antenna (steradians), is approximately related to the antenna gain G by G = 4��/��o. Therefore, when n/fp in Eq.1.5 is replaced with its equal 4��t /G��, the radar equation for a surveillance radar is obtained as
The radar designer has little control over the revisit time ts or the angular coverage �� , which are determined mainly by the job the radar has to perform. The radar cross section also is determined by the radar application. If a large range is required of a surveillance radar, the radar must have the necessary value of the product PavAe. For this reason, a common measure of the capability of a surveillance radar is its power-aperture product . Note that the radar frequency does not appear explicitly in the surveillance radar equation. The choice of frequency, however, will enter implicitly in other ways.
Just as the radar equation for a surveillance radar is different from the conventional radar equation of Eq. 1.5 or the simple radar equation of Eq.1.2, each particular application of a radar generally has to employ a radar equation tailored to that specific application. When the radar echoes from land, sea, or weather clutter are greater than the receiver noise, the radar equation has to be modified to account for clutter being the limitation to detection rather than receiver noise. It can happen that the detection capability of a radar might be limited by clutter in some regions of its coverage and be limited by receiver noise in other regions. This can result in two different sets of radar characteristics, one optimized for noise and the other optimized for clutter; and compromises usually have to be made in radar design. A different type of radar equation is also required when the radar capability is limited by hostile noise jamming.
1.5 RADAR FREQUENCY LETTER-BAND
NOMENCLATURE
It is not always convenient to use the exact numerical frequency range over which a particular type of radar operates. With many military radars, the exact operating frequency range of a radar is usually not disclosed. Thus, the use of letters to designate radar operating bands has been very helpful. The IEEE (Institute of Electrical and Electronic Engineers) has officially standardized the radar letter-band nomenclature, as summarized in Table 1.1.
Comments on the table. The International Telecommunications Union (ITU) assigns specific portions of the electromagnetic spectrum for radiolocation (radar) use as shown in the third column, which applies to ITU Region 2 that includes North and South America. Slight differences occur in the other two ITU Regions. Thus an L-band radar can only operate within the frequency range from 1215 MHz to 1400 MHz, and even within this range, there may be restrictions. Some of the indicated ITU bands are restricted in their usage; for example, the band between 4.2 and 4.4 GHz is reserved
(with few exceptions) for airborne radar altimeters. There are no official ITU allocations for radar in the HF band, but most HF radars share frequencies with other electromagnetic services. The letter-band designation for millimeter wave radars is mm, and there are several frequency bands allocated to radar in this region, but they have not been listed here. Although the official ITU description of millimeter waves is from 30 to 300 GHz, in reality, the technology of radars at Ka band is much closer to the technology of microwave frequencies than to the technology of W band. The millimeter wave radar frequencies are often considered by those who work in this field to have a lower bound of 40 GHz rather than the ��legal�� lower bound of 30 GHz in recognition of the significant difference in technology and applications that is characteristic of millimeter wave radar. Microwaves have not been defined in this standard, but this term generally applies to radars that operate from UHF to K band. The reason that these letter designations might a not be easy for the non-radar engineer to recognize is that they were originally selected to describe the radar bands used in World War II. Secrecy was important at that time so the letters selected to designate the various bands made it hard to guess the frequencies to which they apply. Those who work around radar, however, seldom have a problem with the usage of the radar letter bands.
Other letter bands have been used for describing the electromagnetic spectrum; but they are not suitable for radar and should never be used for radar. One such designation uses the letters A, B, C, etc., originally devised for conducting electronic countermeasure 7 exercises. The IEEE Standard mentioned previously states that these ��are not consistent with radar practice and shall not be used to describe radar-frequency bands.�� Thus, there may be D-band jammers, but never D-band radars.
1.6 EFFECT OF OPERATING FREQUENCY ON RADAR
Radars have been operated at frequencies as low as 2 MHz (just above the AM broadcast band) and as high as several hundred GHz (millimeter wave region). More usually, radar frequencies might be from about 5 MHz to over 95 GHz. This is a very large extent of frequencies, so it should be expected that radar technology, capabilities, and applications will vary considerably depending on the frequency range at which a radar operates. Radars at a particular frequency band usually have different capabilities and characteristics than radars in other frequency bands. Generally, long range is easier to achieve at the lower frequencies because it is easier to obtain high-power transmitters and physically large antennas at the lower frequencies. On the other hand, at the higher radar frequencies, it is easier to achieve accurate measurements of range and location because the higher frequencies provide wider bandwidth (which determines range accuracy and range resolution) as well as narrower beam antennas for a given physical size antenna (which determines angle accuracy and angle resolution). In the following, the applications usually found in the various radar bands are briefly indicated. The differences between adjacent bands, however, are seldom sharp in practice, and overlap in characteristics between adjacent bands is likely.
HF (3 to 30 MHz). The major use of the HF band for radar (Chapter 20) is to detect targets at long ranges (nominally out to 2000 nmi) by taking advantage of the refraction of HF energy by the ionosphere that lies high above the surface of the earth. Radio amateurs refer to this as short-wave propagation and use it to communicate over long distances. The targets for such HF radars might be aircraft, ships, and ballistic missiles, as well as the echo from the sea surface itself that provides information about the direction and speed of the winds that drive the sea.
VHF (30 to 300 MHz). At the beginning of radar development in the 1930s, radars were in this frequency band because these frequencies represented the frontier of radio technology at that time. It is a good frequency for long range air surveillance or detection of ballistic missiles. At these frequencies, the reflection coefficient on scattering from the earth��s surface can be very large, especially over water, so the constructive interference between the direct signal and the surface-reflected signal can increase significantly the range of a VHF radar. Sometimes this effect can almost double the radar��s range. However, when there is constructive interference that increases the range, there can be destructive interference that decreases the range due to the deep nulls in the antenna pattern in the elevation plane. Likewise, the destructive interference can result in poor low-altitude coverage. Detection of moving targets in clutter is often better at the lower frequencies when the radar takes advantage of the doppler frequency shift because doppler ambiguities (that cause blind speeds) are far fewer at low frequencies. VHF radars are not bothered by echoes from rain, but they can be affected by multiple-time-around echoes from meteor ionization and aurora. The radar cross section of aircraft at VHF is generally larger than the radar cross section at higher frequencies. VHF radars frequently cost less compared to radars with the same range performance that operate at higher frequencies.
Although there are many attractive advantages of VHF radars for long-range surveillance, they also have some serious limitations. Deep nulls in elevation and poor low-altitude coverage have been mentioned. The available spectral widths assigned to radar at VHF are small so range resolution is often poor. The antenna beamwidths are usually wider than at microwave frequencies, so there is poor resolution and accuracy in angle. The VHF band is crowded with important civilian services such as TV and FM broadcast, further reducing the availability of spectrum space for radar. External noise levels that can enter the radar via the antenna are higher at VHF than at microwave frequencies. Perhaps the chief limitation of operating radars at VHF is the difficulty of obtaining suitable spectrum space at these crowded frequencies.
In spite of its limitations, the VHF air surveillance radar was widely used by the Soviet Union because it was a large country, and the lower cost of VHF radars made them attractive for providing air surveillance over the large expanse of that country. They have said they produced a large number of VHF air-surveillance radars��some were of very large size and long range, and most were readily transportable. It is interesting to note that VHF airborne intercept radars were widely used by the Germans in World War II. For example, the Lichtenstein SN-2 airborne radar operated from about 60 to over 100 MHz in various models. Radars at such frequencies were not affected by the countermeasure called chaff (also known as window).
UHF (300 to 1000 MHz). Many of the characteristics of radar operating in the VHF region also apply to some extent at UHF. UHF is a good frequency for Airborne Moving Target Indication (AMTI) radar in an Airborne Early Warning Radar (AEW), as discussed in Chapter 3. It is also a good frequency for the operation of long-range radars for the detection and tracking of satellites and ballistic missiles. At the upper portion of this band there can be found long-range shipboard air-surveillance radars and radars (called wind profilers) that measure the speed and direction of the wind.
Ground Penetrating Radar (GPR), discussed in Chapter 21, is an example of what is called an ultrawideband (UWB) radar. Its wide signal bandwidth sometimes covers both the VHF and UHF bands. Such a radar��s signal bandwidth might extend, for instance, from 50 to 500 MHz. A wide bandwidth is needed in order to obtain good range resolution. The lower frequencies are needed to allow the propagation of radar energy into the ground. (Even so, the loss in propagating through typical soil is so high that the ranges of a simple mobile GPR might be only a few meters.) Such ranges are suitable for locating buried power lines and pipe lines, as well as buried objects. If a radar is to see targets located on the surface but within foliage, similar frequencies are needed as for the GPR.
L band (1.0 to 2.0 GHz). This is the preferred frequency band for the operation of long-range (out to 200 nmi) air-surveillance radars. The Air Route Surveillance Radar (ARSR) used for long range air-traffic control is a good example. As one goes up in frequency, the effect of rain on performance begins to become significant, so the radar designer might have to worry about reducing the effect of rain at L-band and higher frequencies. This frequency band has also been attractive for the long-range detection of satellites and defense against intercontinental ballistic missiles.
S band (2.0 to 4.0 GHz). The Airport Surveillance Radar (ASR) that monitors air traffic within the region of an airport is at S band. Its range is typically 50 to 60 nmi. If a 3D radar is wanted (one that determines range, azimuth angle, and elevation angle), it can be achieved at S band.
It was said previously that long-range surveillance is better performed at low frequencies and the accurate measurement of target location is better performed at high frequencies. If only a single radar operating within a single frequency band can be used, then S band is a good compromise. It is also sometimes acceptable to use C band as the choice for a radar that performs both functions. The AWACS airborne air-surveillance radar also operates at S band. Usually, most radar applications are best operated in a particular frequency band at which the radar��s performance is optimum. However, in the example of airborne air-surveillance radars, AWACS is found at S band and the U.S. Navy��s E2 AEW radar at UHF. In spite of such a difference in frequency, it has been said 9 that both radars have comparable performance. (This is an exception to the observation about there being an optimum frequency band for each application.)
The Nexrad weather radar operates at S band. It is a good frequency for the observation of weather because a lower frequency would produce a much weaker radar echo signal from rain (since the radar echo from rain varies as the fourth power of the frequency), and a higher frequency would produce attenuation of the signal as it propagates through the rain and would not allow an accurate measurement of rainfall rate. There are weather radars at higher frequencies, but these are usually of shorter range than Nexrad and might be used for a more specific weather radar application than the accurate meteorological measurements provided by Nexrad.
C band (4.0 to 8.0 GHz). This band lies between S and X bands and has properties in between the two. Often, either S or X band might be preferred to the use of C band, although there have been important applications in the past for C band.
X band (8 to 12.0 GHz). This is a relatively popular radar band for military applications. It is widely used in military airborne radars for performing the roles of interceptor, fighter, and attack (of ground targets), as discussed in Chapter 5. It is also popular for imaging radars based on SAR and ISAR. X band is a suitable frequency for civil marine radars, airborne weather avoidance radar, airborne doppler navigation radars, and the police speed meter. Missile guidance systems are sometimes at X band. Radars at X band are generally of a convenient size and are, therefore, of interest for applications where mobility and light weight are important and very long range is not a major requirement. The relatively wide range of frequencies available at X band and the ability to obtain narrow beamwidths with relatively small antennas in this band are important considerations for high-resolution applications. Because of the high frequency of X band, rain can sometimes be a serious factor in reducing the performance of X-band systems.
Ku , K, and Ka Bands (12.0 to 40 GHz). As one goes to higher radar frequency, the physical size of antennas decrease, and in general, it is more difficult to generate large transmitter power. Thus, the range performance of radars at frequencies above X band is generally less than that of X band. Military airborne radars are found at Ku band as well as at X band. These frequency bands are attractive when a radar of smaller size has to be used for an application not requiring long range. The Airport Surface Detection Equipment (ASDE) generally found on top of the control tower at major airports has been at Ku band, primarily because of its better resolution than X band. In the original K band, there is a water-vapor absorption line at 22.2 GHz, which causes attenuation that can be a serious problem in some applications. This was discovered after the development of K-band radars began during World War II, which is why both Ku and Ka bands were later introduced. The radar echo from rain can limit the capability of radars at these frequencies.
Millimeter Wave Radar. Although this frequency region is of large extent, most of the interest in millimeter wave radar has been in the vicinity of 94 GHz where there is a minimum (called a window) in the atmospheric attenuation. (A window is a region of low attenuation relative to adjacent frequencies. The window at 94 GHz is about as wide as the entire microwave spectrum.) As mentioned previously, for radar purposes, the millimeter wave region, in practice, generally starts at 40 GHz or even at higher frequencies. The technology of millimeter wave radars and the propagation effects of the environment are not only different from microwave radars, but they are usually much more restricting. Unlike what is experienced at microwaves, the millimeter radar signal can be highly attenuated even when propagating in the clear atmosphere. Attenuation varies over the millimeter wave region. The attenuation in the 94 GHz window is actually higher than the attenuation of the atmospheric water-vapor absorption line at 22.2 GHz. The one-way attenuation in the oxygen absorption line at 60 GHz is about 12 dB per km, which essentially precludes its application. Attenuation in rain can also be a limitation in the millimeter wave region.
Interest in millimeter radar has been mainly because of its challenges as a frontier to be explored and put to productive use. Its good features are that it is a great place for employing wide bandwidth signals (there is plenty of spectrum space); radars can have high range-resolution and narrow beamwidths with small antennas; hostile electronic countermeasures to military radars are difficult to employ; and it is easier to have a military radar with low probability of intercept at these frequencies than at lower frequencies. In the past, millimeter wave transmitters were not capable of an average power more than a few hundred watts��and were usually much less. Advances in gyrotrons (Chapter 10) can produce average power many orders of magnitude greater than more conventional millimeter-wave power sources. Thus, availability of high power is not a limitation as it once was.
Laser Radar. Lasers can produce usable power at optical frequencies and in the infrared region of the spectrum. They can utilize wide bandwidth (very short pulses) and can have very narrow beamwidths. Antenna apertures, however, are much smaller than at microwaves. Attenuation in the atmosphere and rain is very high, and performance in bad weather is quite limited. Receiver noise is determined by quantum effects rather than thermal noise. For several reasons, laser radar has had only limited application.
1.7 RADAR NOMENCLATURE
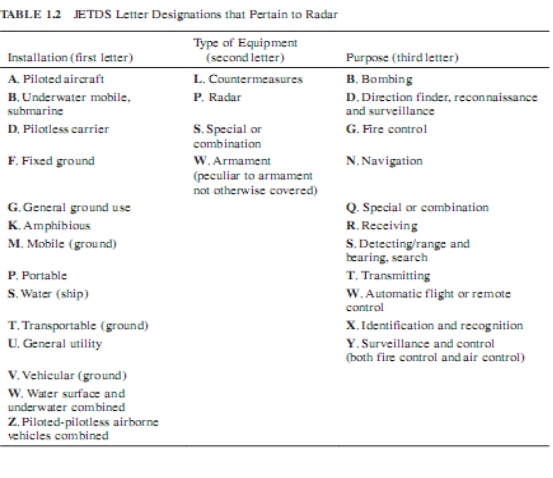
Military electronic equipment, including radar, is identified by the Joint Electronics Type Designation System (JETDS), as described in U.S. Military Standard MIL-STD-196D. The letter portion of the designation consists of the letters AN, a slant bar, and three additional letters appropriately selected to indicate where the equipment is installed, the type of equipment, and its purpose. Following the three letters are a dash and a numeral. The numeral is assigned in sequence for that particular combination of letters. Table 1.2 shows the letters that have been used for radar designations.
A suffix letter (A, B, C,��) follows the original designation for each modification of the equipment where interchangeability has been maintained. The letter V in parentheses added to the designation indicates variable systems (those whose functions may be varied through the addition or deletion of sets, groups, units, or combinations thereof). When the designation is followed by a dash, the letter T, and a number, the equipment is designed for training. In addition to the United States, these designations can also be used by Canada, Australia, New Zealand, and the United Kingdom. Special blocks of numbers are reserved for these countries. Further information can be found on the Internet under MIL-STD-196D.
The U.S. Federal Aviation Agency (FAA) uses the following to designate their airtraffic control radars:
�� ASR Airport Surveillance Radar
�� ARSR Air Route Surveillance Radar
�� ASDE Airport Surface Detection Equipment
�� TDWR Terminal Doppler Weather Radar
The numeral following the letter designation indicates the particular radar model (in sequence).
Weather radars developed by the U. S. Weather Service (NOAA) employ the designation WSR. The number following the designation is the year the radar went into service. Thus WSR-88D is the Nexrad doppler radar that first entered service in 1988. The letter D indicates it is a doppler weather radar.
1.8 SOME PAST ADVANCES IN RADAR
A brief listing of some of the major advances in technology and capability of radar in the twentieth century is given, in somewhat chronological but not exact order, as follows:
�� The development of VHF radar for deployment on surface, ship, and aircraft for military air defense prior to and during World War II.
�� The invention of the microwave magnetron and the application of waveguide technology early in WWII to obtain radars that could operate at microwave frequencies so that smaller and more mobile radars could be employed.
�� The more than 100 different radar models developed at the MIT Radiation Laboratory in its five years of existence during WWII that provided the foundation
for microwave radar.
�� Marcum��s theory of radar detection.
�� The invention and development of the klystron and TWT amplifier tubes that provided high power with good stability.
�� The use of the doppler frequency shift to detect moving targets in the presence of much larger echoes from clutter.
�� The development of radars suitable for air-traffic control.
�� Pulse compression.
�� Monopulse tracking radar with good tracking accuracy and better resistance to electronic countermeasures than prior tracking radars.
�� Synthetic aperture radar, which provided images of the ground and what is on it.
�� Airborne MTI (AMTI) for long-range airborne air surveillance in the presence of clutter.
�� Stable components and subsystems and ultralow sidelobe antennas that allowed high-PRF pulse doppler radar (AWACS) with large rejection of unwanted clutter.
�� HF over-the-horizon radar that extended the range of detection of aircraft and ships by an order of magnitude.
�� Digital processing, which has had a very major effect on improving radar capabilities ever since the early 1970s.
�� Automatic detection and tracking for surveillance radars.
�� Serial production of electronically scanned phased array radars.
�� Inverse synthetic aperture radar (ISAR) that provided an image of a target as needed for noncooperative target recognition of ships.
�� Doppler weather radar.
�� Space radars suitable for the observation of planets such as Venus.
�� Accurate computer calculation of the radar cross section of complex targets.
�� Multifunction airborne military radar that are relatively small and lightweight that fit in the nose of a fighter aircraft and can perform a large number of different air-to-air and air-to-ground functions.
It is always a matter of opinion what the major advances in radar have been. Others might have a different list. Not every major radar accomplishment has been included in this listing. It could have been much longer and could have included multiple examples from each of the other chapters in this book, but this listing is sufficient to indicate the type of advances that have been important for improved radar capabilities.
1.9 APPLIATIONS OF RADAR
Military Applications. Radar was invented in the 1930s because of the need for defense against heavy military bomber aircraft. The military need for radar has probably been its most important application and the source of most of its major developments, including those for civilian purposes.
The chief use of military radar has been for air defense operating from land, sea, or air. It has not been practical to perform successful air defense without radar. In air defense, radar is used for long-range air surveillance, short-range detection of low- altitude ��pop-up�� targets, weapon control, missile guidance, noncooperative target recognition, and battle damage assessment. The proximity fuze in many weapons is also an example of a radar. An excellent measure of the success of radar for military air defense is the large amounts of money that have been spent on methods to counter its effectiveness. These include electronic countermeasures and other aspects of electronic warfare, antiradiation missiles to home on radar signals, and low cross-section aircraft and ships. Radar is also used by the military for reconnaissance, targeting over land or sea, as well as surveillance over the sea.
On the battlefield, radar is asked to perform the functions of air surveillance (including surveillance of aircraft, helicopters, missiles, and unmanned airborne vehicles), control of weapons to an air intercept, hostile weapons location (mortars, artillery, and rockets), detection of intruding personnel, and control of air traffic.
The use of radar for ballistic missile defense has been of interest ever since the threat of ballistic missiles arose in the late 1950s. The longer ranges, high supersonic speeds, and the smaller target size of ballistic missiles make the problem challenging. There is no natural clutter problem in space as there is for defense against aircraft, but ballistic missiles can appear in the presence of a large number of extraneous confusion targets and other countermeasures that an attacker can launch to accompany the reentry vehicle carrying a warhead. The basic ballistic missile defense problem becomes more of a target recognition problem rather than detection and tracking. The need for warning of the approach of ballistic missiles has resulted in a number of different types of radars for performing such a function. Similarly, radars have been deployed that are capable of detecting and tracking satellites.
A related task for radar that is not military is the detection and interception of drug traffic. There are several types of radars that can contribute to this need, including the long-range HF over-the-horizon radar.
Remote Sensing of the Environment. The major application in this category has been weather observation radar such as the Nexrad system whose output is often seen on the television weather report. There also exist vertical-looking wind-profiler radars that determine wind speed and direction as a function of altitude, by detecting the very weak radar echo from the clear air. Located around airports are the Terminal Doppler Weather Radar (TDWR) systems that warn of dangerous wind shear produced by the weather effect known as the downburst, which can accompany severe storms. There is usually a specially designed weather avoidance radar in the nose of small as well as large aircraft to warn of dangerous or uncomfortable weather in flight.
Another successful remote-sensing radar was the downward-looking spaceborne altimeter radar that measured worldwide the geoid (the mean sea level, which is not the same all over the world), with exceptionally high accuracy. There have been attempts in the past to use radar for determining soil moisture and for assessing the status of agriculture crops, but these have not provided sufficient accuracy. Imaging adars in satellites or aircraft have been used to help ships efficiently navigate northern seas coated with ice because radar can tell which types of ice are easier for a ship to penetrate.
Air-Traffic Control. The high degree of safety in modern air travel is due in part to the successful applications of radar for the effective, efficient, and safe control of air traffic. Major airports employ an Airport Surveillance Radar (ASR) for observing the air traffic in the vicinity of the airport. Such radars also provide information about nearby weather so aircraft can be routed around uncomfortable weather. Major airports also have a radar called Airport Surface Detection Equipment (ASDE) for observing and safely controlling aircraft and airport vehicle traffic on the ground. For control of air traffic en route from one terminal to another, long-range Air Route Surveillance Radars (ARSR) are found worldwide. The Air Traffic Control Radar Beacon System (ATCRBS) is not a radar but is a cooperative system used to identify aircraft in flight. It uses radar-like technology and was originally based on the military IFF (Identification
Friend or Foe) system.
Other Applications. A highly significant application of radar that provided information not available by any other method, was the exploration of the surface of the planet Venus by an imaging radar that could see under the ever-present clouds that mask the planet. One of the widest used and least expensive of radars has been the civil marine radar found throughout the world for the safe navigation of boats and ships. Some readers have undoubtedly been confronted by the highway police using the CW doppler radar to measure the speed of a vehicle. Ground penetrating radar has been used to find buried utility lines, as well as by the police for locating buried objects and bodies. Archeologists have used it to determine where to begin to look for buried artifacts. Radar has been helpful to both the ornithologist and entomologist for better understanding the movements of birds and insects. It has also been demonstrated that radar can detect the gas seepage that is often found over underground oil and gas deposits.
1.10 CONCEPTUAL RADAR SYSTEM DESIG
There are various aspects to radar system design. But before a new radar that has not existed previously can be manufactured, a conceptual design has to be performed to guide the actual development. A conceptual design is based on the requirements for the radar that will satisfy the customer or user of the radar. The result of a conceptual design effort is to provide a list of the radar characteristics as found in the radar equation and related equations and the general characteristics of the subsystems (transmitter, antenna, receiver, signal processing, and so forth) that might be employed. The radar equation is used as an important guide for determining the various tradeoffs and options available to the radar system designer so as to determine a suitable concept to meet the desired need. This section briefly summarizes how a radar systems engineer might begin to approach the conceptual design of a new radar. There are no firmly established procedures to carry out a conceptual design. Every radar company and every radar design engineer develops his or her own style. What is described here is a brief summary of one approach to conceptual radar design.
General Guideline. It should be mentioned that there are at least two ways by which a new radar system might be produced for some particular radar application. One method is based on exploiting the advantages of some new invention, new technique, new device, or new knowledge. The invention of the microwave magnetron early in World War II is an example. After the magnetron appeared, radar design was different from what it had been before. The other, and probably more common method for conceptual radar system design, is to start with what the new radar has to do, examine the various approaches available to achieve the desired capability, carefully evaluate each approach, and then select the one that best meets the needs within the operational and fiscal constraints imposed. In brief, it might consist of the following steps:
�� Description of the need or problem to be solved. This is from the viewpoint of the customer or the user of the radar.
�� Interaction between the customer and the systems engineer. This is for the purpose of exploring the tradeoffs, which the customer might not be aware of, that might allow the customer to better obtain what is wanted with- out excessive cost or risk. Unfortunately, interaction between the potential user of the radar and the radar systems engineer is not always done in competitive procurements.
�� Identification and exploration of possible solutions. This includes understanding the advantages and limitations of the various possible solutions.
�� Selection of the optimum or near optimum solution. In many engineering endeavors, optimum does not mean the best since the best might not be affordable or achievable in the required time. Optimum, as used here, means the best under a given set of assumptions. Engineering often involves achieving a near-optimum, not the optimum. Selecting the preferred solution should be based on a well-defined criterion.
�� Detailed description of the selected approach. This is in terms of the characteristics of the radar and the type of subsystems to be employed.
�� Analysis and evaluation of the proposed design. This is to verify the correctness of the selected approach.
As one proceeds through this process, one might reach a ��dead end�� and have to start over��sometimes more than once. Having to start over is not unusual during a new design effort.
One cannot devise a unique set of guidelines for performing the design of a radar. If that were possible, radar design could be done entirely by computer. Because of the usual lack of complete information, most engineering design requires, at some point, the judgment and experience of the design engineer in order to succeed.
The Radar Equation in Conceptual Design. The radar equation is the basis for conceptual radar system design. Some parameters of the radar equation are determined by what the radar is required to do. Others may be decided upon unilaterally by the customer��but that should be done with caution. The customer usually should be the one who states the nature of the radar target, the environment in which the radar is to operate, restrictions on size and weight, the use to which the radar information is to be put, and any other constraints that have to be imposed. From this information, the radar systems engineer determines what is the radar cross section of the target, the range and angle accuracies needed to meet the radar user��s needs, as well as the antenna revisit time. Some parameters, such as antenna gain, might be affected by more than one need or requirement. For instance, a particular antenna beamwidth might be influenced by the tracking accuracy, resolution of nearby targets, the maximum size the antenna can be for a particular application, the need for a desired radar range, and the choice of radar frequency. The radar frequency is usually affected by many things, including the availability of allowed frequencies at which to operate. The radar frequency might be the last parameter of the radar to be selected��after many other compromises have been made.
REFERENCES
1. IEEE Standard Dictionary of Electrical and Electronic Terms, 4th Ed. New York: IEEE, 1988.
2. M. I. Skolnik, G. Linde, and K. Meads, ��Senrad: an advanced wideband air-surveillance radar,��
IEEE Trans., vol. AES-37, , pp. 1163�C1175, October 2001.
3. M. I. Skolnik, Introduction to Radar Systems, New York: McGraw-Hill, 2001, Fig. 2.6.
4. F. E. Nathanson, Radar Design Principles, New York: McGraw-Hill, 1991, Fig. 2.2.
5.This table has been derived from IEEE Standard Letter Designations for Radar-Frequency Bands, IEEE Std. 521-2002.
6. Specific radiolocation frequency ranges may be found in the ��FCC Online Table of Frequency Allocations,�� 47 C.F.R. �� 2.106.
7.��Performing electronic countermeasures in the United States and Canada,�� U.S. Navy OPNAVINST 3430.9B, October 27, 1969. Similar versions issued by the U.S. Air Force, AFR 55-44; U.S. Army, AR 105-86; and U.S. Marine Corps, MCO 3430.1.
8. A. Zachepitsky, ��VHF (metric band) radars from Nizhny Novgorod Research Radiotechnical Institute,�� IEEE AES Systems Magazine, vol. 15, pp. 9�C14, June 2000.
9. Anonymous, ��AWACS vs. E2C battle a standoff,�� EW Magazine, p. 31, May/June 1976.
10. M. Skolnik, D. Hemenway, and J. P. Hansen, ��Radar detection of gas seepage associated with oil and gas deposits,�� IEEE Trans, vol. GRS-30, pp. 630�C633, May 1992.
Downloaded from Digital Engineering Library @ McGraw-Hill (www.digitalengineeringlibrary.com)
, Chapter 1
An Introduction and Overview of Radar
Merrill Skolnik
1.1 RADAR IN BRIEF
Radar is an electromagnetic sensor for the detection and location of reflecting objects. Its
operation can be summarized as follows:
�� The radar radiates electromagnetic energy from an antenna to propagate in space.
�� Some of the radiated energy is intercepted by a reflecting object, usually called a target, located at a distance from the radar.
�� The energy intercepted by the target is reradiated in many directions.
�� Some of the reradiated (echo) energy is returned to and received by the radar antenna.
�� After amplification by a receiver and with the aid of proper signal processing, a decision is made at the output of the receiver as to whether or not a target echo signal is present. At that time, the target location and possibly other information about the target is acquired.
A common waveform radiated by a radar is a series of relatively narrow, rectangular-like pulses. An example of a waveform for a medium-range radar that detects aircraft might be described as a short pulse one millionth of a second in duration (one microsecond); the time between pulses might be one millisecond (so that the pulse repetition frequency is one kilohertz); the peak power from the radar transmitter might be one million watts (one megawatt); and with these numbers, the average power from the transmitter is one kilowatt. An average power of one kilowatt might be less than the power of the electric lighting usually found in a ��typical�� classroom. We assume this example radar might operate in the middle of the microwave frequency range such as from 2.7 to 2.9 GHz, which is a typical frequency band for civil airport-surveillance radars. Its wavelength might be about 10 cm (rounding off, for simplicity). With the proper antenna such a radar might detect aircraft out to ranges of 50 to 60 nmi, more or less. The echo power received by a radar from a target can vary over a wide range of values, but we arbitrarily assume a ��typical�� echo signal for illustrative purposes might have a power of perhaps 10−13watts. If the radiated power is 106 watts (one megawatt), the ratio of echo signal power from a target to the radar transmitter power in this example is 10�C19, or the received echo is 190 dB less than the transmitted signal. That is quite a difference between the magnitude of the transmitted signal and a detectable received echo signal. Some radars have to detect targets at ranges as short as the distance from behind home plate to the pitcher��s mound in a baseball park (to measure the speed of a pitched ball), while other radars have to operate over distances as great as the distances to the nearest planets. Thus, a radar might be small enough to hold in the palm of one hand or large enough to occupy the space of many football fields.
Radar targets might be aircraft, ships, or missiles; but radar targets can also be people, birds, insects, precipitation, clear air turbulence, ionized media, land features (vegetation, mountains, roads, rivers, airfields, buildings, fences, and power-line poles), sea, ice, icebergs, buoys, underground features, meteors, aurora, spacecraft, and planets. In addition to measuring the range to a target as well as its angular direction, a radar can also find the relative velocity of a target either by determining the rate of change of the range measurement with time or by extracting the radial velocity from the doppler frequency shift of the echo signal. If the location of a moving target is measured over a period of time, the track, or trajectory, of the target can be found from which the absolute velocity of the target and its direction of travel can be determined and a prediction can be made as to its future location. Properly designed radars can determine the size and shape of a target and might even be able to recognize one type or class of target from another.
Basic Parts of a Radar. Figure 1.1 is a very elementary basic block diagram showing the subsystems usually found in a radar. The transmitter, which is shown here as a power amplifier, generates a suitable waveform for the particular job the radar is to perform. It might have an average power as small as milliwatts or as large as megawatts. (The average power is a far better indication of the capability of a radar��s performance than is its peak power.) Most radars use a short pulse waveform so that a single antenna can be used on a time-shared basis for both transmitting and receiving.
The function of the duplexer is to allow a single antenna to be used by protecting the sensitive receiver from burning out while the transmitter is on and by directing the received echo signal to the receiver rather than to the transmitter.
The antenna is the device that allows the transmitted energy to be propagated into space and then collects the echo energy on receive. It is almost always a directive antenna, one that directs the radiated energy into a narrow beam to concentrate the power as well as to allow the determination of the direction to the target. An antenna that produces a narrow directive beam on transmit usually has a large area on receive to allow the collection of weak echo signals from the target. The antenna not only concentrates the energy on transmit and collects the echo energy on receive, but it also acts as a spatial filter to provide angle resolution and other capabilities.
In radar, range is the term generally used to mean distance from the radar to the target. Range is also used here in some of its other dictionary definitions.
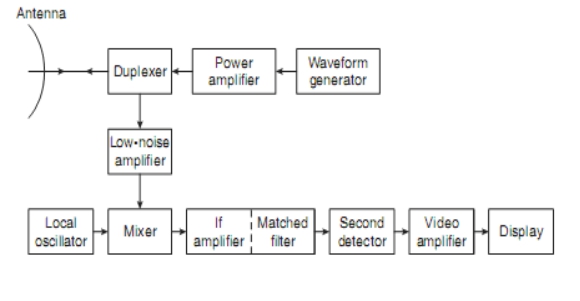
FIGURE 1.1 Block diagram of a simple radar employing a power amplifier as the transmitter in the upper portion of the figure and a superheterodyne receiver in the lower portion of the figure .
The receiver amplifies the weak received signal to a level where its presence can be detected. Because noise is the ultimate limitation on the ability of a radar to make a reliable detection decision and extract information about the target, care is taken to insure that the receiver produces very little noise of its own. At the microwave frequencies, where most radars are found, the noise that affects radar performance is usually from the first stage of the receiver, shown here in Figure 1.1 as a low-noise amplifier. For many radar applications where the limitation to detection is the unwanted radar echoes from the environment (called clutter), the receiver needs to have a large enough dynamic range so as to avoid having the clutter echoes adversely affect detection of wanted moving targets by causing the receiver to saturate. The dynamic range of a receiver, usually expressed in decibels, is defined as the ratio of the maximum to the minimum signal input power levels over which the receiver can operate with some specified performance. The maximum signal level might be set by the nonlinear effects of the receiver response that can be tolerated (for example, the signal power at which the receiver begins to saturate), and the minimum signal might be the minimum detectable signal. The signal processor, which is often in the IF portion of the receiver, might be described as being the part of the receiver that separates the desired signal from the undesired signals that can degrade the detection process. Signal processing includes the matched filter that maximizes the output signal-to-noise ratio. Signal processing also includes the doppler processing that maximizes the signal-to-clutter ratio of a moving target when clutter is larger than receiver noise, and it separates one moving target from other moving targets or from clutter echoes. The detection decision is made at the output of the receiver, so a target is declared to be present when the receiver output exceeds a predetermined threshold. If the threshold is set too low, the receiver noise can cause excessive false alarms. If the threshold is set too high, detections of some targets might be missed that would otherwise have been detected. The criterion for determining the level of the decision threshold is to set the threshold so it produces an acceptable predetermined average rate of false alarms due to receiver noise.
After the detection decision is made, the track of a target can be determined, where a track is the locus of target locations measured over time. This is an example of data processing . The processed target detection information or its track might be displayed to an operator; or the detection information might be used to automatically guide a missile to a target; or the radar output might be further processed to provide other information about the nature of the target. The radar control insures that the various parts of a radar operate in a coordinated and cooperative manner, as, for example, providing timing signals to various parts of the radar as required.
The radar engineer has as resources time that allows good doppler processing, bandwidth for good range resolution, space that allows a large antenna, and energy for long range performance and accurate measurements. External factors affecting radar performance include the target characteristics; external noise that might enter via the antenna; unwanted clutter echoes from land, sea, birds, or rain; interference from other electromagnetic radiators; and propagation effects due to the earth��s surface and atmosphere. These factors are mentioned to emphasize that they can be highly important in the design and application of a radar.
Radar Transmitters. The radar transmitter must not only be able to generate the peak and average powers required to detect the desired targets at the maximum range, but also has to generate a signal with the proper waveform and the stability needed for the particular application. Transmitters may be oscillators or amplifiers, but the latter usually offer more advantages.
There have been many types of radar power sources used in radar (Chapter 10). The magnetron power oscillator was at one time very popular, but it is seldom used except for civil marine radar (Chapter 22). Because of the magnetron��s relatively low average power (one or two kilowatts) and poor stability, other power sources are usually more appropriate for applications requiring long-range detection of small moving targets in the presence of large clutter echoes. The magnetron power oscillator is an example of what is called a crossed-field tube. There is also a related crossed-field amplifier (CFA) that has been used in some radars in the past, but it also suffers limitations for important radar applications, especially for those requiring detection of moving targets in clutter. The high-power klystron and the traveling wave tube (TWT) are examples of what are called linear beam tubes. At the high powers often employed by radars, both tubes have suitably wide bandwidths as well as good stability as needed for doppler processing, and both have been popular.
The solid-state amplifier, such as the transistor, has also been used in radar, especially in phased arrays. Although an individual transistor has relatively low power, each of the many radiating elements of an array antenna can utilize multiple transistors to achieve the high power needed for many radar applications. When solid-state transistor amplifiers are used, the radar designer has to be able to accommodate the high duty cycle at which these devices have to operate, the long pulses they must use that require pulse compression, and the multiple pulses of different widths to allow detection at short as well as long range. Thus the use of solid-state transmitters can have an effect on other parts of the radar system. At millimeter wavelengths very high power can be obtained with the gyrotron, either as an amplifier or as an oscillator. The gridcontrol vacuum tube was used to good advantage for a long time in UHF and lower frequency radars, but there has been less interest in the lower frequencies for radar.
Although not everyone might agree, some radar system engineers��if given a choice��would consider the klystron amplifier as the prime candidate for a high- power modern radar if the application were suitable for its use.
Radar Antennas. The antenna is what connects the radar to the outside world on transmit; that is, it is directive and has a narrow beamwidth; (2) collects the received echo energy from the target; (3) provides a measurement of the angular direction to the target; (4) provides spatial resolution to resolve (or separate) targets in angle; and (5) allows the desired volume of space to be observed. The antenna can be a mechanically scanned parabolic reflector, a mechanically scanned planar phased array, or a mechanically scanned end-fire antenna. It can be an electronically scanned phased array using a single transmitter with either a corporate feed or a space-feed configuration to distribute the power to each antenna element or an electronically scanned phased array employing at each antenna element a small solid-state ��miniature�� radar (also called an active aperture phased array). Each type of antenna has its particular advantages and limitations. Generally, the larger the antenna the better, but there can be practical constraints that limit its size.
1.2 TYPES OF RADARS
Although there is no single way to characterize a radar, here we do so by means of what might be the major feature that distinguishes one type of radar from another.
Pulse radar. This is a radar that radiates a repetitive series of almost-rectangular pulses. It might be called the canonical form of a radar, the one usually thought of as a radar when nothing else is said to define a radar.
High-resolution radar. High resolution can be obtained in the range, angle, or doppler velocity coordinates, but high resolution usually implies that the radar has high range resolution. Some high-resolution radars have range resolutions in terms of fractions of a meter, but it can be as small as a few centimeters.
Pulse compression radar. This is a radar that uses a long pulse with internal modulation (usually frequency or phase modulation) to obtain the energy of a long pulse with the resolution of a short pulse.
Continuous wave (CW) radar. This radar employs a continuous sine wave. It almost always uses the doppler frequency shift for detecting moving targets or for measuring the relative velocity of a target.
FM-CW radar. This CW radar uses frequency modulation of the waveform to allow a range measurement.
Surveillance radar. Although a dictionary might not define surveillance this way, a surveillance radar is one that detects the presence of a target (such as an aircraft or a ship) and determines its location in range and angle. It can also observe the target over a period of time so as to obtain its track.
Moving target indication (MTI). This is a pulse radar that detects moving targets in clutter by using a low pulse repetition frequency (PRF) that usually has no range ambiguities. It does have ambiguities in the doppler domain that result in so-called blind speeds.
Pulse doppler radar. There are two types of pulse doppler radars that employ either a high or medium PRF pulse radar. They both use the doppler frequency shift to extract moving targets in clutter. A high PRF pulse doppler radar has no ambiguities (blind speeds) in doppler, but it does have range ambiguities. A medium PRF pulse doppler radar has ambiguities in both range and doppler.
Tracking radar. This is a radar that provides the track, or trajectory, of a target. Tracking radars can be further delineated as STT, ADT, TWS, and phased array trackers as described below:
Single Target Tracker (STT). Tracks a single target at a data rate high enough to provide accurate tracking of a maneuvering target. A revisit time of 0.1s (data rate of 10 measurements per second) might be ��typical.�� It might employ the monopulse tracking method for accurate tracking information in the angle coordinate.
Automatic detection and tracking (ADT). This is tracking performed by a surveillance radar. It can have a very large number of targets in track by using the measurements of target locations obtained over multiple scans of the antenna. Its data rate is not as high as the STT. Revisit times might range from one to 12 seconds, depending on the application.
Track-while-scan (TWS). Usually a radar that provides surveillance over a narrow region of angle in one or two dimensions, so as to provide at a rapid update rate location information on all targets within a limited angular region of observation. It has been used in the past for ground-based radars that guide aircraft to a landing, in some types of weapon-control radars, and in some military airborne radars.
Phased array tracker. An electronically scanned phased array can (almost) ��continuously�� track more than one target at a high data rate. It can also simultaneously provide the lower data rate tracking of multiple targets similar to that performed by ADT.
Imaging radar. This radar produces a two-dimensional image of a target or a scene, such as a portion of the surface of the earth and what is on it. These radars usually are on moving platforms.
Sidelooking airborne radar (SLAR). This airborne sidelooking imaging radar provides high resolution in range and obtains suitable resolution in angle by using a narrow beamwidth antenna.
Synthetic aperture radar (SAR). SAR is a coherent imaging radar on a moving vehicle that uses the phase information of the echo signal to obtain an image of a scene with high resolution in both range and cross-range. High range resolution is often obtained using pulse compression. Inverse synthetic aperture radar (ISAR). ISAR is a coherent imaging radar that uses high resolution in range and the relative motion of the target to obtain high resolution in the doppler domain that allows resolution in the cross-range dimension to be obtained. It can be on a moving vehicle or it can be stationary.
Weapon control radar. This name is usually applied to a singletarget tracker used for defending against air attack.
Guidance radar. This is usually a radar on a missile that allows the missile to ��home in,�� or guide itself, to a target.
Weather (meteorological) observation. Such radars detect, recognize, and measure precipitation rate, wind speed and direction,and observe other weather effects .
l Coherent implies that the phase of the radar signal is used as an important part of the radar process. important for meteorological purposes. These may be special radars or another function of surveillance radars.
l Doppler weather radar. This is a weather observation radar that employs the doppler frequency shift caused by moving weather effects to determine the wind; the wind shear (when the wind blows in different directions), which can indicate a dangerous weather condition such as a tornado or a downburst of wind; as well as other meteorological effects.
Target recognition. In some cases, it might be important to recognize the type of target being observed by radar (e.g., an automobile rather than a bird), or to recognize the particular type of target ( an automobile rather than a truck, or a starling rather than a spar- row), or to recognize one class of target from another (a cruise ship rather than a tanker). When used for military purposes, it is usually called a noncooperative target recognition (NCTR) radar, as compared to a cooperative recognition system such as IFF (identification friend or foe), which is not a radar. When target recognition involves some part of the natural environment, the radar is usually known as a remote sensing (of the environment) radar.
Multifunction radar. If each of the above radars were thought of as providing some radar function, then a multifunction radar is one designed to perform more than one such function��usually performing one function at a time on a time-shared basis.
There are many other ways to describe radars, including land, sea, airborne, spaceborne, mobile, transportable, air-traffic control, military, ground-penetrating, ultra-wideband, over the horizon, instrumentation, laser (or lidar), by the frequency band at which they operate (UHF, L, S, and so on), by their application, and so forth.
1.3 INFORMATION AVAILABLE FROM A RADAR
Detection of targets is of little value unless some information about the target is obtained as well. Likewise, target information without target detection is meaningless.
Range. Probably the most distinguishing feature of a conventional radar is its ability to determine the range to a target by measuring the time it takes for the radar signal to propagate at the speed of light out to the target and back to the radar. No other sensor can measure the distance to a remote target at long range with the accuracy of radar (basically limited at long ranges by the accuracy of the knowledge of the velocity of propagation). At modest ranges, the precision can be a few centimeters. To measure range, some sort of timing mark must be introduced on the transmitted waveform. A timing mark can be a short pulse (an amplitude modulation of the signal), but it can also be a distinctive modulation of the frequency or phase. The accuracy of a range measurement depends on the radar signal bandwidth: the wider the bandwidth, the greater the accuracy. Thus bandwidth is the basic measure of range accuracy.
Radial Velocity. The radial velocity of a target is obtained from the rate of change of range over a period of time. It can also be obtained from the measurement of the doppler frequency shift. An accurate measurement of radial velocity requires time. Hence time is the basic parameter describing the quality of a radial velocity measurement. The speed of a moving target and its direction of travel can be obtained from its track, which can be found from the radar measurements of the target location over a period of time.
Angular Direction. One method for determining the direction to a target is by determining the angle where the magnitude of the echo signal from a scanning antenna is maximum. This usually requires an antenna with a narrow beamwidth (a high-gain antenna). An air-surveillance radar with a rotating antenna beam determines angle in this manner. The angle to a target in one angular dimension can also be determined by using two antenna beams, slightly displaced in angle, and comparing the echo amplitude received in each beam. Four beams are needed to obtain the angle measurement in both azimuth and elevation. The monopulse tracking radar discussed in Chapter 9 is a good example. The accuracy of an angle measurement depends on the electrical size of the antenna; i.e, the size of the antenna given in wavelengths.
Size and Shape. If the radar has sufficient resolution capability in range or angle, it can provide a measurement of the target extent in the dimension of high resolution. Range is usually the coordinate where resolution is obtained. Resolution in cross range (given by the range multiplied by the antenna beamwidth) can be obtained with very narrow beamwidth antennas. However, the angular width of an antenna beam is limited, so the cross-range resolution obtained by this method is not as good as the range resolution. Very good resolution in the cross-range dimension can be obtained by employing the doppler frequency domain, based on SAR (synthetic aperture radar) or ISAR (inverse synthetic aperture radar systems), as discussed in Chapter 17. There needs to be relative motion between the target and the radar in order to obtain the cross-range resolution by SAR or ISAR. With sufficient resolution in both range and cross-range, not only can the size be obtained in two orthogonal coordinates, but the target shape can sometimes be discerned.
The Importance of Bandwidth in Radar. Bandwidth basically represents information; hence, it is very important in many radar applications. There are two types of bandwidth encountered in radar. One is the signal bandwidth, which is the bandwidth determined by the signal pulse width or by any internal modulation of the signal. The other is tunable bandwidth. Generally, the signal bandwidth of a simple pulse of sine wave of duration �� is 1/��. (Pulse compression waveforms, discussed in Chapter 8, can have much greater bandwidth than the reciprocal of their pulse width.) Large band-width is needed for resolving targets in range, for accurate measurement of range to a target, and for providing a limited capability to recognize one type of target from another. High range resolution also can be useful for reducing the degrading effects of what is known as glint in a tracking radar, for measuring the altitude of an aircraft based on the difference in time delay (range) between the two-way direct signal from radar to target and the two-way surface-scattered signal from radar to surface to target (also called multipath height finding), and in increasing the target-signal-to-clutter ratio. In military systems, high range resolution may be employed for counting the number of aircraft flying in close formation and for recognizing and thwarting some types of deception countermeasures.
Tunable bandwidth offers the ability to change (tune) the radar signal frequency over a wide range of the available spectrum. This can be used for reducing mutual interference among radars that operate in the same frequency band, as well as in attempting to make hostile electronic countermeasures less effective. The higher the operating frequency the easier it is to obtain wide signal and wide tunable bandwidth.
A limitation on the availability of bandwidth in a radar is the control of the spectrum by government regulating agencies (in the United States, the Federal Communication Commission, and internationally, the International Telecommunications Union). After the success of radar in World War II, radar was allowed to operate over about one- third of the microwave spectrum. This spectrum space has been reduced considerably over the years with the advent of many commercial users of the spectrum in the age of ��wireless�� and other services requiring the electromagnetic spectrum. Thus, the radar engineer is increasingly experiencing smaller available spectrum space and bandwidth allocations that can be vital for the success of many radar applications.
|
