>��1.1��
����vr = vcos��ΪĿ�������ٶȣ�������״����/�룬v������/��Ŀ������ٶȣ��״ﲨ�������ף����ǽǶ�Ŀ��֮��ķ�����״ﲨ����Ϊ��Լ�ٷ�֮����ȷ���ں��ȶ�����Ƶ��Լ����vr��kt�����������ף���
������Ƶ�Ʊ��㷺�������̶ֹ��Ӳ��ƶ�Ŀ�꣬���2��ͨ��5���ۡ������״ﱻ��ΪMTI���ƶ�Ŀ��ָʾ����AMTI���ս�̨MIT������������ա������ִ�������������״������Ҫ�ľ��µ���ͻ��ؿ��м����״�����еľ��¿���ս�����״����ö�����ЧӦ�����ơ�Ȼ�����ڶ�ս��ʹ�ã���Щ����������״��Ӧ�÷��档��CW�����������״ﻹ�����˶�����ЧӦ����ƶ�Ŀ�꣬��Ϊ�������Ǵ��������״��ʹ�á��ڸ�Ƶ���Ӿ��״��20�£�������������ӵ������Ŀ�꣬�����һز����ڲ�ʹ�õĶ����ռ�����
��һ����Ҫ��Ӧ���״������Ƶ���ϵ������������Ĺ۲죬�ἰ�ڱ���ǰ����������������ֵģ���19�£���һ�������״��
������ר�������˵�����ǵĶ�����Ƶ�ƣ���17�£�ʹ�����������ض����յ����״�Ҳ�ǻ��ڶ�����Ƶ�ơ��ڶ������״����ձ��ʹ�ö��״������ȶ��Ը��ߵ�Ҫ�����������źŴ����ĸ����ԣ�����ЩҪ��Ը�������ʵ�ֶ������ṩ���ش����档��Ӧ�ἰ���Ƕ�����Ƶ�ƣ�����һ���״���Բ����ٶȵĹؼ�������������Ӧ�ý�������ά�ֳ����ij������ƺ������ٶȲ�����
1.4�״﷽��
���״���뷽�̣����״﷽�̼�ƣ��������Ϲ�����Ϊһ������ܵ��״ﷶΧ�dz����õ�Ŀ�ģ������Ƿdz��������״�ϵͳ��ƵIJο����ݡ����״﷽�̵ļ���ʽ����д��

���ұ߱�д���������صĻ�������ʵ�ʹ��̵ķ������ұߵĵ�һ����ĸ���ڴ�һ���״ﵽ��һ����������Gt�����书��Pt����R�Ĺ����ܶȡ������еڶ�����������Ŀ���״�ɢ����档�����е�λ��������磬ƽ���ף����������״�ķ���Ŀ���ػض�����Դ��ʽ��������䷵��·�����ڶ�����ĸ����ǰ������ĸ�Ļ����ص��״�ز��źŵķ�����������ÿ��λ������������״����ߡ���ע���״�Ŀ��ɢ�����������������̶��塣��Ч�����һ��Ae�ռ��Ļز����ֹ���Pr�ӽ������߷����״��������״ﷶΧ��Rmax�Ƿ����ڽ��յ����źŵ�����С���״Smin���״﷽�̵ļ���ʽ����źŵĶ���������

һ����ԣ�����������ͬ�����״��ͽ��ա�����������,������Gt֮��Ĵ���Ͷ���Ч���Ae�Ľ��գ�����G=4��Ae/�� 2�����������״��źŲ��������뷽��1.3�ṩ�����������״﷽�����õ���ʽ������û����ʾ����һ��ֻռ���������߹�ϵ������ֻռ�����ߵ���Ч�����
���״﷽�̵ļ���ʽ����ָ������,��Ϊ�������˺ܶණ�������Ƿdz����á���ͼ���źţ�Smin�����ڽ����������������Ա�ʾΪ

���������ʽ�У�kToB����ν�����뵼����裬����k =��������������To���¶����룬B =���մ�����ͨ������������ջ���Χ��,kTo�Ļ�����4��10−21��/���ȡ�Ϊ��˵��һ��ʵ�ʣ�������ģ�����������������������������ֽ�������Fn����Ϊһ��ʵ�ʵĽ��ջ�������һ������Ľ������������н綨�����ڽ��յ����źŽ���⣬��Ҳ��Ҫ����Ƚ�����������S / N��1�����ֻ��Ҫһ��������������ź��������ȣ�S/ N��1�Ϳ��ԡ��������������������㹻���Ի������IJ�ʵ̽�⣨��������������ֵ��������ļ����ֵ�����ڸ����״��������ҵ����������崦�������������״�Ȼ����ܼ����������Ǽ����״ﲨ����һ���ظ���һϵ�о������塣��Щ���屻������һ���⣨����һ����������Ϊ��˵����Щ��ӵ��źţ����״﷽�̵ķ����dz���һ��ϵ��nEi��n��������Ei��n�����n��������Ч�ġ����ֵҲ�����ڱ��ı��ҵ���
����Pt��һ���״������ֵ���ʡ�ƽ������Pav��һ���ܺõ�̽���״�Ŀ��������ʩ��������ʱ���״�ʹ��Pt=Pav/fp����fp�����е������״��ظ�Ƶ�ʷ����Լ������������ʱ�䡣����ı���͵������������Ӱ���Ų��Ĵ����ͱ仯�ķ�Χ���״����������״﷽���У���Щ����ЧӦ�������״﷽�̷���F 4�����أ����ڵ�26�����ۡ��������뷽�̵��״����ǿ��Լ���ʽ

��������ʽ���ٶ������Ƶ���B����1�������ձ��������״����Ls������1������Ϊϵͳ����ʧ���������Կ��ǵ���ʧ���Է�����һ���״�����档��һ��ʧ�����ؿ����൱�����ϵͳ����ʧ�������ԣ������ܵ��µĹ��Ʒ�Χ�dz���Ĵ������״﷽��Ԥ�⡣����ʧ��10�ֱ���20�ֱ��������е��״�ϵͳ��ʧ�����ؿ������ڿɾ��Dz�һ���ˡ���
����1.5�������״�Ĺ۲�Ŀ�굽���n�����塣��������˵����������һ���״��Ŀ���ʱ�����n /fp��������һ�������״������۲�һ��Ŀ���ʱ����to��Ȼ�������ʽ��Ҫ�ĵļ����״�Ĺ۲�Ƕ���������ʱ��ts �������н�ͨ������һ�����´ӵ�4��12ʱ�����״����˼����״�Ķ������ƣ������������ijһʱ��ts������������ʱ��ts�����ǵ���Ϊ����/��o��������to=n /fp����o�������ߣ�����Ƕ������岨�����ȣ���Լ���й���������G��G=4/��o����ˣ�n /fp��Eq.1.5��������ǵ���4��ts/G�����ü����״﷽�����

���״����ʦ��ts����ɨ��ʱ��ĽǶȷ�Χ���������ɹ������״�ȷ���������ơ����״�ɢ�����Ҳ���״���ȷ���������Ҫ��Χ�ļ����״�״�����и�PavAe����ֵ��Ϊ�ˣ�һ�������״������ij���ָ�������Ĺ��ʿ�������ע�⣬�״�Ƶ��û�г�����ȷ�ļ����״﷽�̡�������Ƶ�ʵ�ѡ�������������档
�������״﷽�̲�ͬ�ڳ����״﷽�̡� 1.5ʽ��1.2ʽ�Ǽ��״﷽�̣��״�ÿһ���ض���Ӧ�ó���һ��Ҫ�����״﷽���ʺ��ض���Ӧ�ó�����½���������������״�ز��Ӳ����ڽ��������������״﷽�̽����Ĺ����ڱ������������ƽ��ջ������������ܻᷢ��һ���״�̽�����������������串��һЩ�����Ļ��ң������������������������ơ���ᵼ�����ֲ�ͬ���״����Զ������������Ż���ƺ������Ż��Ӳ���ơ���ͬ���͵��״﷽��ʱ���״��������жԸ����������Ʋ�ͬ���͵��״﷽��ʱͨ��ҲҪ��ơ�
1.5�״�Ƶ�ʶ����Ʊ�
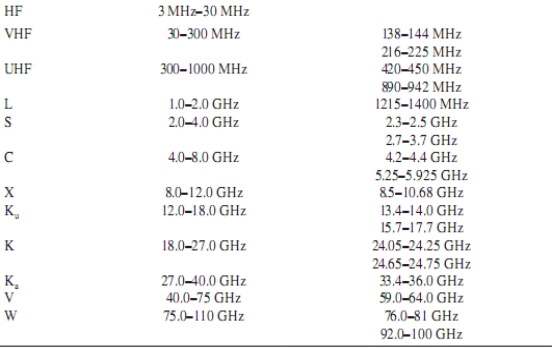
���������Ƿ���ʹ�õ�ȷ������Ƶ�ʷ�Χ��һ���ض����͵��״������������������״ȷ�Ĺ���Ƶ�ʷ�Χ���״�ͨ��û��¶����ˣ�ʹ����ĸָ���״﹤��Ƶ�ηdz��а�������IEEE����������ӹ���ʦЭ�ᣩ��ʽ�淶���״ﲨ�����������1.1������
����ͼ�����ʵ������ˣ����ʵ������ķ�������ߵ磨�״���Ƶ��ʹ�õ��ض������ڵ����������ڹ��ʵ�����2����������ʾ���������������в��췢���������������ʵ�����������ˣ�һ��L�����״�ֻ������Ƶ�ʷ�Χ�ڣ���1215�յ�1400�գ���ʹ�������Χ�ڣ����������ơ����ʵ����ı�ʾ��������һЩ�ֶӵ�ʹ�ã����磬��4.2��4.4 GHzƵ��Ԥ�������������⣩�Ļ����״�߶���ơ�Ŀǰû����ʽ�Ĺ��ʵ��������ڸ�Ƶ�����״�ķ��䣬���������Ƶ����״�������������Ƶ�ʡ����Ų��εĺ��ײ��״������Ǻ��ף��м���Ƶ�ʷ�������������״ﲨ�Σ�������û�б����������Ȼ�ٷ����ʵ������ײ����ܣ���30��300 GHz��ʵ���Ͼ��ǣ� ��1.1 IEEE�����״�����Ƶ����
 Ƶ������ Ƶ���ض���Χ ��2�����ʵ�������Ƶ�ʷ���
Ƶ������ Ƶ���ض���Χ ��2�����ʵ�������Ƶ�ʷ���
 �ض�Ƶ�ʷ�Χ
�ض�Ƶ�ʷ�Χ
��Ka�����״\���DZȶԼ�����WƵ�����dz��Ľӽ���Ƶ�ʡ����ײ��״��Ƶ��ͨ������Ϊ��Щ˭����һ����Ĺ�����һ���½�40ǧ�գ����������涨������30ǧ�յ�Լ���ڼ���������ش���Ӧ��ʶ��ٷֱ��Ǻ��ײ��״�����������û�н綨��������������һ���������״�ӳ���Ƶ��Ka���β�������������Щ��ĸ���Ʒ��״﹤��ʦȷ���Dz����ף��������ѡ���������״��ڵڶ��������ս��ʹ�õ�Ƶ�Ρ���������Ҫ�ģ���ʱѡ������ָ����ͬ�IJ��������Բ²�����Dz��õ�Ƶ�ʡ�����˭�����Щ�״�������״ﲨ�η���Ϣ��ʹ�����⡣
��һƵ���ѱ������������Ƶ�ף������Dz����ʺ��״�����������״����һ��ָ��ʹ�õ�A��B��C�ȣ�ԭ����ƽ��е��ӶԿ���ϰ�� IEEE��ǰ���ᵽ�Ĺ��ң���Щ���������״�������������������״�Ƶ�Ρ�����ˣ�������D-���θ�����������δ��D -�����״
1.6 Ӱ���״�Ƶ�ʹ���Ƶ��
�״�ɹ����ڸߴ�2 MHz�ĵ�Ƶ�ʣ��Ը���AM�㲥Ƶ�Σ��ͼ����ոߣ����ײ������������������״�Ƶ�ʿɴ�Լ5 MHz������95ǧ�ա�����һ���ܴ��Ƶ�ʷ�Χ������Ӧ�ÿ���Ԥ�ڡ��״\��������Ӧ�ý����ܴ��Ƶ�ʷ�Χ��������һ���״�������������ض�Ƶ�ʲ����״�ͨ�����в�ͬ�Ĺ��ܺͱ�����Ƶ���״�������һ����˵����Χ�������ڽϵ�Ƶ��ʵ�ֵģ���Ϊ��������ø߹��ʷ�������ڽϵ͵�Ƶ�ʶԴ������ߡ���һ���棬���״�Ƶ�ʸ��߸�����ʵ��ȷ�IJ�����Χ��λ����Ϊ���ߵ�Ƶ���ṩ����Ĵ�����������Χ���Ⱥ;���ֱ��ʣ��Լ�һ�������������ߴ����ߵ�խ�������ߣ������Ǿ��ȺͽǷֱ��ʣ����������Ӧ�ù���ͨ�������ڲ�ͬ���״ﲨ�ν����˼�Ҫ˵����Ȼ�����ڴ��IJ�����ʵ���к��ٶۻ�����������Ƶ���ص����ص��ǿ��ܵġ�
��Ƶ��3��30�գ����ڸ�Ƶ�����״����Ҫ��;����20�£�����Զ����̽��Ŀ�꣨�����ϳ���2000���ͨ�����øߵĵ����������Ǹ�Ƶ�����ڵ����������ơ�ҵ�����ߵ罫�˳�Ϊ�̲�������ʹ������������ͨ�š����ָ�Ƶ�״��Ŀ������Ƿɻ�����ͧ�������͵����������Լ��Ӻ��汾���ṩ���йط���ͷ������ϣ��ƶ�����ز���
����Ƶ��30��300�գ�����20����30�����ʼ��չ���״�״��ڴ�Ƶ�ε�Ƶ�ʣ���Ϊ����������ߵ缼���ڵ�ʱ��ǰ�ء�����һ��Զ�̿��м��ӣ���������̽��������õ�Ƶ�ʡ�����ЩƵ�ʷ���ϵ���ӵ������ɢ����ܷdz����ر�����ˮ������֮���ֱ���źźͱ����ԵĽṹ���ŷ����źſ��Դ�������ӵ�����Ƶ�״�̽�ⷶΧ����ʱ������Ч���������Գɱ�������VHF�ķ�Χ�����ǵ��нṹ�ĸ��������˷�Χ�������ƻ��Եĸ��ţ���Χ�����ں���ƽ�潵�����������ģʽ��Χ��ͬ���ƻ��Եĸ��ŵ��½ϲ�ĵͿո��ǡ����Ӳ����˶�Ŀ������һ�ָ��õ�Ƶ�ʽϵ�ʱ�״���õĶ�����Ƶ�Ƶ����ơ���Ϊ������ģ�������ä���ٶ������ٶ�ԶԶ�ڵ�Ƶ�١�����Ƶ�״�������Ļز��������ǻ��ܵ���һ�δ����ǵ���ͼ���������ɻ����״�ɢ����VHFһ�ڣ���ͨ�����ڸ��ߵ�Ƶ���״�ɢ����������Ƶ�״ﳣ���ɱ��ϵͱȽ���ͬ�ķ�Χ���ܹ����ڸ��ߵ�Ƶ���״
��Ȼ�ж���Զ�̼���״����Ƶ�����������˵��ŵ㵫Ҳ��һЩ���صľ����ԡ��ں��κͶ��ӵͿո�������Ѿ��ᵽ������������Ƶ�״���õ�Ƶ����С����ֱ���ͨ���ܲ�������������ͨ���Ϲ㷺����Ƶ�ʣ����Բ����ڷֱ��ʵͺͽǶȵ�ȷ�ԡ���VHFƵ��ӵ��������Ӻ�FM�㲥��Ҫ�����·��Ӷ���һ��������Ƶ�ռ��״�����ԡ��ⲿ����ˮƽ���Խ����״������Ǹ��ߵ�Ƶ�ʱ�������������Ƶ����VHF����Ƶ��Ҳ����VHF�״ᆳӪ����������ȡ����Щӵ����Ƶ���ʺϵ�Ƶ�ռ�����ѡ�
���ľ����Ծ�����ˣ�����Ƶ���м���״�㷺������Ϊ������һ����������ҳɱ��ϵ͵�����Ƶ�״�ʹ�����ṩ�ڸù���Ƭ���м���������������˵���������˴�����һЩ�dz���Ĺ�ģ�ͷ�Χ������Ƶ�ռ���״��Ҵ�������������䡣��Ȥ���ǻ�������Ƶ�����״ﱻ�㷺ʹ���ڵڶ��������ս�еĵ¹������磬��֧��ʿSN-2�����״���Ӫ��Լ60����ͬ��ģʽ�Գ���100�ա���������Ƶ���״ﲢû���ܵ���ν�ĶԲ�������Ҳ��Ϊ���ڣ���
����Ƶ��300��1000�գ�������VHF�״������������ص�Ҳ������һЩ�ڳ���Ƶ�ij̶ȡ�����Ƶ��һ�ֻ��ض�Ŀ����ʾ��AMTI���ڻ���Ԥ���״���AEW���״���3�����������õ�Ƶ�ʡ���Ҳ��һ��Ϊ���Զ���״���������õ�Ƶ�ʺ����Ǻ͵����������١������������ϰ벿�ֶ����Է�����Զ�̽��ؿ��м����״���״��Ϊ�������ǣ��������ٶȺͷ���
̽���״GPR�����ڵ�21�����۵���һ����ν�ij�������UWB���״�����ӡ���㷺���źŴ�����ʱ�����˸�Ƶ�ͳ���Ƶ���Ρ������״���źŴ�������չ��������50��500 MHz�������Ĵ�������Ҫ���Ա������õľ���ֱ��ʡ��ϵ͵�Ƶ����Ҫ������������״�������������������ˣ�ͨ�����͵�������������ʧ�����֮�ߣ�һ�����ƶ��״�ķ�Χ����ֻ�����ס��������ķ�Χ��Ѱ������º͵��������Լ��ʺ϶�������״��ǿ�����������Ŀ�꣬���ڱ���ͬ����Ƶ�ʻ���Ҫ��̽���״
L���Σ�1.0��2.0ǧ�գ������dz������з�Χ������200�������ѡƵ�ʲ��Σ����м����״�ú�·�����״ARSR��Զ�������ʹ�õĽ�ͨ������һ���ܺõ����ӡ�����һλƵ�ʵ�����������Ч����Ӱ�쿪ʼ�����Ҫ������״�����߿��ܵ��ļ���L������Ը��ߵ�Ƶ�ʵ�Ӱ�졣��ЩƵ��Ҳ���������ǺͶ��ʵ�����������Զ��̽�⡣
S���Σ�2.0��4.0ǧ�գ������������״�ϵͳ��ASR�������Լ�ⷶΧ�ڵĻ����������н�ͨ��S���Ρ����ķ�Χͨ����50��60������һ��3D�״ﱻʹ�ã�һ��ȷ���ķ�Χ����λ�Ǻ����ǣ���������ʵ����S���Ρ�
��˵��ǰ��Զ�̼��ӿɸ��õ�ִ���ڵ�Ƶ��Ŀ��λ�õľ�ȷ�������ڸ�Ƶ�ʵؽ��С����ֻ���ڵ���Ƶ�ε��״����Ҳ����ʹ����S������һ���ܺõ�Ӧ�á�����ʱҲ���Խ��ܵ���Ϊһ�״�ִ�����ֹ���ѡ��C���Ρ��ڿ���Ԥ�������м����״�Ҳ��S����������ͨ��������״�Ӧ�õ�����������ض�Ƶ���ڸ��״��������ѡ�Ȼ�����ڻ��ؿ������Ӽ����״Ԥ������S���κ�����������E2�����ó���Ƶ����Ԥ���״������һ����ͬ��Ƶ�ʣ���������˵�������״�����൱�����ܡ�������һ��ÿ�������������ѵ�Ƶ����)
��һ�������״﹤����S���Ρ�����һ�����õ�����۲�Ƶ�ʣ���Ϊ�ϵ͵�Ƶ�ʻ���������ö��״�ز��źţ���Ϊ���״�ز��仯��Ϊ����Ȩ����Ƶ�ʣ����ߵ�Ƶ�ʻ�����źŵ�˥������Ϊ��ͨ����ˮ����Ҳ���������н����ʵľ�ȷ���������ڽϸ�Ƶ�������״����Щͨ���Ƕ�����һ�������״ﷶΧ��������һ�����������������һ�������״��ṩȷ�������״����Ӧ����ʹ�á�
C���Σ�4.0��8.0ǧ�գ��������������S���κ�X���β�������������֮�䡣ͨ����S��X���ο����ǿ�ȡ��C���ε�ʹ�ã���Ȼ�Ѿ��ڹ�ȥ��C������Ҫ��Ӧ�á�
X���Σ�8?12.0ǧ�գ������Ǿ����ϵ�Ӧ�ñȽ��ܻ�ӭ���״ﲨ�Ρ����㷺Ӧ���ھ��»����״�Ա�ִ������ս���������ü��������Ե���Ŀ�꣩���ڵ�5�������⣬SAR��ISAR�����״�Ҳ�㷺ʹ�á� X������һ���ʺ���亣���״�Ƶ�ʣ���������Ԥ���״���ض����յ����״������ٶȱ��������Ƶ�ϵͳ����ʱ��X���Ρ���X�����״���һ�ַ��㣬�����һ���СӦ�õ���Ȥ���������Ժ������ᣬ�ܳ���Χ������һ������Ҫ��Ҫ����Ƶ�ʿ���X���αȽϹ㷺�����ܹ��������һ���Ƚ�С������С�����Ǹ�������Ӧ�õ���Ҫ���ء�����X���θ�Ƶ������ʱ��һ�����ص������ڼ���X���ܲ���ϵͳ��
Ku��K����Ka���Σ�12.0��40ǧ�գ������ڵ����ߵ��״�Ƶ�ʣ����ߵ������ߴ���٣�����һ������¸����Բ�����ķ��书�ʡ������������X�����״��Ƶ�ʷ�, Χ������һ�㲻������X���εġ����û����״ﱻ������Ku�����Լ���X���Ρ���ЩƵ�������������Ľ�С���״�Ҫһ����Ҫ��Զ��Ӧ�ó������������豸��ASDE��һ����Ϊ����Ҫ��������Ku���Σ���Ҫ����Ϊ������X���ε����������ڿ������Ķ�����ԭ����K������������22.2ǧ����ᵼ��˥��������һЩӦ�������������������ߡ����Ƿ��ֺ�չ��K�������״��ڵڶ��������ս�ڼ������ʼʵʩ������������Ku��Ka���δ���ˮ�ز�������������ЩƵ�ʵ��״�������
���ײ��״������һ������Ƶ���ںܴ�̶������ں��ײ��״�������Ȥ������94ǧ�ո�������һ������ȣ���Ϊһ�������ڴ���˥�������������ǵ�˥��������ڽ�������Ƶ�ʡ���94ǧ�յĴ���Լ����������Ƶ������ǰ���������״��ں��ײ�����Ŀ��ʵ����һ����40ǧ�ջ��������ߵ�Ƶ�ʿ�ʼ���ں��ײ��״�ͻ���Ӱ�켼���Ĵ��������������״ﲻͬ��������ͨ���и������ơ������ǿ����õ�������ʹ�����ʵĿ����������ײ��״��źŸ߶ȼ�����˥���仯�Ժ��ײ�������94 GHz�Ĵ���˥��ʵ���ϸ��ڴ�����ˮ������˥������22.2ǧ�հ²��������ߡ�һ����60 GHz�����������߷�ʽ˥����Լ��ÿ����12�ֱ��������ų������á���˥��Ҳ�����ں��ײ��е��������ơ�
�ں��ײ��״����Ȥ��Ҫ����Ϊ��Ϊһ��ǰ�ص���ս��Ҫ̽�ֲ�Ͷ������ʹ�á������ŵ�������һ�ֲ��øߴ����źŵ�Ƶ�ף��д�����Ƶ�ռ䣩;�״��п���Χ�ֱ��ʲ���С�Ͳ�����������Ƶ��;�жԾ����״���ӶԿ����Բ��ü������Ը����ؽػ����ֵ�ľ����״������ЩƵ��Ҫ�͡��ڹ�ȥ���ײ������������ƽ�����ı���һ�����ظߣ�ͨ��Ҫ�ٵöࡣ�������ǵ��о���չ����10�£����Բ���ƽ�����ʱȴ�ͳ���״���Ҫ������˸߹��ʵĹ�Ӧ��û��һ��������Ϊ�������Ǻ��ײ���
�����״�������Թ��Ƶ�ʿ��ù��ʺ�Ƶ�ĺ����������ǿ������ÿ������������壩�����ҿ����к�խ����Ƶ�����������߿�ԶԶС������¯���ڴ�����˥������ˮ�Ƿdz��ߣ��ڶ��������ı���ȴ�൱���ޡ����ջ���������������������������ЧӦ������ԭ���״�ֻȡ��������Ӧ�á�
1.7�״�����
���õ����豸�����״��������ϵ�����ʽָ��ϵͳ��JETDS�������������ñ�MIL-STD - 196Dȷ�����ڱ��в�����ɵ�һ������������ѡ����ָʾ�豸��װ��������;����������ĸ��һ�����ۺź�һ����˵���������ǰ�˳�������ض�����ĸ����1.2��ʾ���ѱ������״�������ĸ��
һ������A��B��C����)����ԭ������ƶ�ÿ���豸��ԭ�ڻ�����һֱ������ȥ�������е���ĸV���ӵ�ָ����ʾ�仯ϵͳ����Щ���ܿ�ͨ�������豸��⣬���飬����������������ϣ�����ָ����һ�����ۺ�֮����ĸT��һ�����ָ��豸��רΪ��;������������Щ����Ҳ�������ڼ��ôĴ����ǣ���������Ӣ������������ֶ���������Щ���ҡ������������ҵ����û������ҵ�MIL-STD-196D֮�½����
��������վ֣�FAA����ʹ������ָ�������н�ͨ�����״
��ASR ��������״�
��ARSR ��·����״�
��ASDE �����������豸
��TDWR �����������״�
��������ֱ�ָ���������״�ģ�ͣ���ʱ��˳��
��������֣�NOAA���������״����Ʋ���ָ��WSR������ָ���������״���Ƚ��������ˣ�WSR- 88D����һ�������������״������1988�꿪ʼ���ۡ���ĸD��������һ�������������״
��1.2 JETDS��Ʊ����״���;
��װ�� �豸���� ��;
A. ���˼�ʻ�ɻ� L. �����豸 B. ��ը
B. ˮ���ƶ�DZͧ P. �״� D. .�����ǣ����ͼ���
D. ���˺ź�ĸ S. �ر����� G. �������
F. �̶����� W. ����װ�������� N. ����
��û�а���������
G. һ���ʹ�� Q. �ر�����
K. ���� R. ����
M. �ƶ������棩 S. ���/���뷽������
P. ��Яʽ T. ����
S. ˮ������ W. �Զ����л�Զ�̿���
T. ��ͨ�����棩 X. ������ʶ��
U. һ���ʹ�� Y. ���ӺͿ��ƣ������������������ƣ�
V. ���������棩
W. ˮ���ˮ��
Z. �����ɻ���ʻ��
1.8��ȥ��һЩ��չ�״�
��20����һЩ���״��ڼ���������ش��չ��һ��ʱ��˳��û��ȷ�е�˳������������
������Ƶ�״��Ͻ�����ķ�չ�����·��շɻ�ǰ�Ͷ�ս�ڼ䡣
�������ſعܵķ����ͼ����IJ������ڶ�ս�еĻ���״�Ӧ�ã����Թ�������Ƶ��ʹ�����С�ƶ��״�ɲ��á�
���ڳ���100�ֲ�ͬ�״↑������ʡ����ѧԺ����ʵ�����ڶ�ս�ڼ�������������������ṩ����ģ�����״
������ķ���۵��״�̽�⡣
�������ͷ�չ�벨�ܵ��ֲ��в��Ŵ���ṩ�߹����ȶ��Ժá�
��������Ƶ�����������һز����ڸ�����ƶ�Ŀ�ꡣ
����չ���״��ʺϿ��н�ͨ���ơ�
������ѹ����
������������״�������õĸ��پ��Ⱥ��õ��������ܱ���ǰ�����״��е��ӶԿ����ܡ�
���ϳɿ��״����ṩ�˵����ͼ��
������MTI��˾Զ���루AMTI���ڿ����д��ڵĻ��ҿ��м��ӡ�
���ȶ����������ϵͳ�ͳ��������ߣ��������ظ�Ƶ������������״Ԥ������������õ��Ӳ����ơ�
����Ƶ���Ӿ��״�ӳ��˷ɻ��ʹ�ֻ����һ����������Χ��
�����ִ�����20����70������������Ѿ��Ը����״﹦���г��ش��Ӱ�졣
���Զ����ͼ����״�ĸ��١�
��������������ɨ��������״
����ϳɿ��״ISAR�����ṩ��һ�����ڷ�Ŀ��ʶ�������Ŀ��ͼ��
�������������״
���ռ��״��ʺϵ����ǣ�����ǵĹ۲졣
����ȷ�ĸ���Ŀ���״�ɢ������������㡣
����ܻ����״�ľ�����Խ�С���������ʺ���һ��ս�����ı��ӺͿ���ִ�в�ͬ�ĿնԿյ����ͷɻ��Ĺ��ܡ�
�״�����������������������ش�������������в�ͬ������������ÿһ����Ҫ���״�ɾ��ѱ�������б������������Ը���Ҳ���ܰ������Ա����������µĶ��ʵ�������б��������͵Ľ�����Ϊ�����״���������Ҫ��
1.9�״��Ӧ��
����Ӧ�á����ڵķ���������Ҫ��20����30����Կ����;��º�ը����������Ҫ�״������������Ҫ��Ӧ�ú�����Ҫ��չ����Ҫ��Դ�����а�����������Ŀ�ġ�
�����״���Ҫ��;�Ѿ���½�ؿ��У����ϣ����չ���������û��ʵ�ʳɹ������ķ����״�ڷ����״�����Զ�̿��м��ӣ�����һϵ�е�̽��Ϳ�������ʽ��Ŀ�꣬�������Ƶ����Ƶ�������ʽĿ��ʶ�𣬺�ս������������������������ըҲ��һ���״�����ӡ�һ�����·����״�ʮ�ֳɹ�������Ǯ�Ѿ����İ취������������Ч���Ĵ�ʩ����Щ��ʩ�������ӶԿ��͵���ս�������������״��źŵͽ���ɻ��ʹ�ֻ���״ﻹ���ھ��������½�ػ���Ŀ���Լ����Ӻ����Ͽա�
��ս���ϣ��״ﱻҪ��ִ�п�����죨�����ɻ���ֱ�������������ӵĹ��ܣ��Լ����˻������������ƵĿ������أ��ص�ж��������Ȼ��ڣ����ںͻ����������̽����Ա�Լ����н�ͨ���ơ�
����ʹ�õ������������״����Ȥ����Ϊ������������в����50���ĩ���֡���Χ��ʱ��Խ���߳����ٵ��ٶ��Լ����������ߴ��С��Ŀ��ʹ�������ս����Ϊ����Էɻ��ķ���û�пռ���Ӳ����⣬�������������Գ�����һ������Ŀ����Һʹ��ڣ�������ʩ�Ĵ������ڹ����߿�������������Я����ͷ�������ĵ����������������Ϊһ��Ŀ��ʶ�����⣬�����Ǹ����̽����١��ڶԵ���������Ԥ����������Ҫ�����˶Բ�ͬ���͵��״�����ִ�����ֹ��ܡ�ͬ���Ѳ����״���̽��������ǵ�������
�����ص������״ﲻ�Ǿ��������Ͷ�Ʒ�������ء��м������͵��״�ܹ��ƶ��ⷽ�����Ҫ���а����Գ��Ӿ�Զ�̸�Ƶ�״
ң�л��������������ҪӦ��������۲��״����һ�������״�ϵͳ��������������ڵ����Ͽ������������档�������Ŵ�ֱǰհ�Է����ߣ��״���ͨ�����ȷ������պ������״�ز����ٺ߶ȹ��ܵķ���λ�ڻ�����Χ�ǻ��������������״�����������״ϵͳ�DZ��»����������������ܰ������صı�����������Ӱ�졣ͨ����һ���������ǰ���״ᆵ��С���Լ����ͷɻ���Σ�ջ����������رܷ��С�
��һ���ɹ���ң���״�����������״����ǣ�ȫ����ˮƽ�棨��ƽ����ƽ�棬�ⲻ���������ͬһ���㣩�Լ��ߵľ��ȡ�Ŀǰ���ڹ�ȥʹ��ȷ������ʪ�Ⱥ�����ũҵ����״���״����;������Щ��û���ṩ�㹻�ľ��ȡ����ǻ�ɻ������״���������������Ч�غ��б�����������Ϊ�״���Ը�����Щ���͵ı����������ʻ��
���н�ͨ���ơ���ȫ���ִ��������и߶ȵIJ���ԭ���Ƕ��״����Ч����Ч�ijɹ�Ӧ�úͰ�ȫ�Ŀ��н�ͨ���ơ���Ҫ�������ù۲��ڻ��������Ŀ��н�ͨ�Ļ��������״�ϵͳ��ASR���������״ﻹ�ṩ���ڸ�����������Ϣ���Ա�ɻ��������������·�����ҡ���Ҫ����Ҳ���״�۲�Ҫ��Ͱ�ȫ���Ʒɻ��ͻ������泵����ͨ�����������豸������̽���豸�����Կ��н�ͨ����;�д�һ������һ���նˣ�Զ�̺������״ARSR����������ء����н�ͨ�����״��ű�ϵͳ��ATCRBS�������״���Dz���һ�ֺ����ƶ���ȷ�������еķɻ�����ʹ���״�ȼ���ԭ���ھ�����̳�ģ�ʶ�����ѻ���ˣ�ϵͳ��
��������Ӧ�á��״���һ���dz���Ҫ��Ӧ���κ����������ṩ����Ϣ�������ã��ɳ����״�Խ���̽�����DZ��棬���Կ����ڲ��������Ʋ��ڸ������ǡ���������㷺ʹ�õĺ������״�һֱ�Ǹ��ص��洬�ʹ�����亽���״ﰲȫ���С���Щ�����Ѿ������ɸ��ٹ�·ʹ��CW�������״������������ٶȵľ��졣̽���״��ѱ�����Ѱ����ع�����ҵ��·��������ȷ������Ķ���λ����Ʒ������ѧ����������ȷ�������↑ʼѰ���������״�һֱ���а���������ѧ�Һ�����ѧ�Ҹ��õ��˽����������ı䶯��������ǻ������״����̽�������������������ڵ��µ�ʯ�ͺ���Ȼ�����������֡�
1.10�״�ϵͳ�ĸ������
Ŀǰ�״�ϵͳ����и������档������һ���µ��״��Ѳ�������ǰ��������һ��������ִ����ָ��ʵ�ʵķ�չ����������ǻ��ڶ��״ォ����ͻ����״��û���Ҫ��һ���������Ŭ���Ľ�����ṩһ���嵥�״��������״﷽�̺���ص���ϵͳ�е�һ������������������ߣ����ջ����źŴ������ȵȣ������״﷽�̱��������á�Ϊȷ������Ȩ���ѡ����״�ϵͳ��ƣ��Ӷ�ȷ������ʵ��������������ı�Ҫ��ָ�����塣���ڼ�Ҫ����������״�ϵͳ����ʦ���ܿ�ʼһ���µ��״������ơ�û���ι̵ļȶ�������и�����ơ�ÿ���״﹫˾��ÿ���״���ƹ���ʦ�����Լ��ķ��һ���״���Ʒ����ĸ�Ҫ��������������һ�ָ��
ͨ�õķ�����ǰ��Ӧ������������������һ���µ��״�ϵͳ���ܶ�ijЩ�ض��״�Ӧ�ó����IJ�����һ�ַ����ǽ����ڷ���һЩ�·����¼������豸����֪ʶ�����ơ������ſع��ڵڶ��������ս���ڷ�������һ�����ӡ��ſس��ֺ��״���Ʋ�ͬ����֮ǰ������Ҳ�����������״����ϵͳ����Ʒ����������µ��״���������������ɴﵽԤ�ڵ����������Ǹ��ַ���ÿһ�ַ�������ȫ��������Ȼ��ѡ��һ�����ʺϵ�ҵ��Χ�Ͳ�������Ҫʩ�ӵ����ơ�����֮�����ܰ������²��裺
����Ҫ������������������Ǵӿͻ����û��״�Ĺ۵㡣
���ͻ�֮�������ú�ϵͳ����ʦ������Ϊ̽��Ȩ�⣬���ͻ����ܲ�֪���ģ������ʹ�ͻ��ܹ����õصõ���Ҫ����ʲô��;���й���ķ��û���ա����ҵ���DZ���û�֮��ĺ��״�ϵͳ����ʦ�������������������ɹ���
��ʶ���̽�����ܵĽ��������������˽�����ƺ��ֿ��ܵĽ���취���ơ�
��ѡ����ѻ�ӽ���ѵĽ��������������������Ż�������ζ����ǰ����õģ����������е��Ļ��ڹ涨��ʱ��ʵ�ֵġ��Ż�����������ָ��һ���ļ���һ����õġ����������漰������ʵ�����Ŷ�������ѡ�
ѡ����ѡ�Ľ������Ӧ����һ����ȷ�ı���
����ϸ˵����ѡ��İ취�����Ƕ��״���ص����������͵���ϵͳ���á�
�������뽨����Ƶ����ۡ�������֤��ѡ��������ȷ�ġ�
����һλͨ����һ���̵ļ��������ǿ��ܴ��һ��������ͬ���������¿�ʼ����ʱ����ֹһ�Ρ����¿�ʼ�����µ���ƹ����Dz�Ѱ����
���Dz����ƶ�����ִ��һ���״�һ���ص����ָ�ϡ�������ǿ��ܵģ��״����ƿ����ɵ���������ȫ������ȱ������������ͨ����������������Ҫ��ijЩʱ�����жϺ;������ƹ���ʦ����ȡ�óɹ���
�ڸ�������״﷽�̡����״﷽�����״�ϵͳ�ĸ�����ƵĻ������״﷽�̵�һЩ���������״���Ҫ��ʲô�������˿��ܵ��������������Ŀͻ���ӦС�����¡��ͻ�ͨ��Ӧ�����״�ԭ��״̬����Ŀ�꣬�״�����������С�����������ƣ�ʹ�ø��״���Ϣ�����Լ��������κ����ƶ�Ҫǿ�ӡ��������Ϣ���״�ϵͳ����ʦȷ����ʲô��Ŀ�귶Χ����Ҫ�����״��û�����Ҫ���Ǿ����״�ɢ������Լ�����ɨ��ʱ�䡣�������������һЩ�������ܻ�Ӱ�쵽һ�����ϵ���Ҫ��Ҫ������һ���ض������߲��������ܵ����پ���Ӱ�죬������Ŀ��ֱ��ʣ���Ϊ����Ӧ�����ߴ�������Լ���������״ﷶΧ����Ҫѡ���״�Ƶ�ʡ����״��Ƶ��ͨ���ܵ���������Ӱ���������ʹ�õĹ���Ƶ�ʡ����״��Ƶ�ʿ��������һ��������ѡ�к�����Ҫ���Ѿ����������
�ο����ף�
1�� IEEE���ֵ�����͵��������4�档ŦԼ�����������ѧ����ʦ���ϻᣬ1988��
2����ʲ�ƶ�������ֵ£���K.������Senrad���Ƚ��Ŀ������м����״�����������ѧ����ʦ���ϻᡣ����AES - 37ҳ�� 1163����1175�꣬2001��10�¡�
3����ʲ�ƶ���ˣ��״�ϵͳ���ܣ�ŦԼ�������ϣ����2001�꣬ͼ 2.6��
4��Զ��ɣɭ���״�����ԭ����ŦԼ�������ϣ����1991�꣬ͼ 2.2��
5. ����״�Ƶ����������IEEE����IEEE���� 521-2002��
6���ض������ߵ�Ƶ�ʷ�Χ���ɲο������ѻ�����Ƶ�ʻ��ֱ�����47 CFR���� 2.106��
7���������ͼ��ô�ĵ��ӱ��ݶԿ�������������OPNAVINST 3430.9B��1969��10��27�ա����Ƶİ汾���������վ���AFC55-44ǩ��;����½����105-86;�ͺ���½ս�ӣ�ͳ�ﴦ3430.1��
8��Zachepitsky��������Ƶ�����ò��Σ�����ŵ������о�Radiotechnical�о����״�����������ѧ����ʦ���ϻ�AES��˾ϵͳ��־����һ��15ҳ.9��14�գ�2000��6�¡�
9����������AWACS��E2Cս���ţ�������ս��־����31�գ�5��/ 1976��6�¡�
10����ʲ�ƶ���ˣ�D.����������JP��ɭ�����״���ʯ�ͺ���Ȼ��������Ȼ����©��⣬�����������ѧ����ʦ���ϻ���������۲�����- 30ҳ�� 630-633��1992��5�¡�
���ֹ���ͼ���@�����ϣ����www.digitalengineeringlibrary.com��
, Introduction to Radar Systems
�״�ϵͳ�Ľ���
��ʲ�ƶ����
��ֹҳ�룺1��20ҳ
�������ڣ�2001��
���浥λ�������ϣ����˾���ֹ���ͼ���
www.digitalengineeringlibrary.com
��һ�� �״�ļ���Ҫ
1.1�״�ļ��
�״���һ�ּ��Ͷ�λ�ķ��������Ŵ����������IJ����ɹ�������:
�������״�����߷����Ų��������ռ䡣
��������Щ�ǽػ������ķ�������ͨ����ΪĿ�����״ﶨλ���롣
�������ػ�Ŀ��������Ƿ���������
������һЩ����(����)�����ص������յ��״����ߡ�
�����������Ŵ�����������ʵ����źŴ������ж��ڽ���������Ƿ�Ŀ��ز��źŵĴ��ڡ���ʱĿ��λ�úͿ��ܵ������й���Ϣ��Ӧ����ȡ��
����һ����ͨ�IJ������״����һϵ�������խ���Σ���������塣һ��Ϊ�г��״�̽��ɻ����ܱ���Ϊһ���ij���ʱ��1������壨1�룩;����֮���ʱ�������100����루���������ظ�Ƶ�ʲ���1ǧ�գ����״�����ֵ���ʿ�����100���ߣ�1���ߣ����Լ�����Щ�����з����ƽ������Ϊ1ǧ�ߡ�һ��1ǧ�ߵ�ƽ�����ʿ��ܵ���ͨ����һ�������͵��������е����������ʡ����Ǽ�����������״�ɹ�������Ƶ�ʵ��м䷶Χ�����2.7��2.9 GHz������һ�����͵����û�������״�Ƶ�������IJ��������Ǵ�Լ10���ף�Ϊ������������룩�������ú��ʵ������״��̽��ɻ��������50��60���ﷶΧ���������ʴ�һ��Ŀ���״���յ��仯�����нϴ�ķ�Χ��ֵ�������������������������˵����;���ز��źſ����п���10−13�ߵĹ��ʡ�������书��Ϊ106�ߣ�1���ߣ���������������״�书�ʴ�һ��Ŀ������Ļز��źŹ��ʵ�Ϊ10�C19�ߣ�����ջ����DZȴ����źŸ���190�ֱ�������һ�������źŵķ��Ⱥͼ����յ��Ļز��ź�֮���ر�IJ��졣
һЩ�״��̽��Ŀ�귶Χ�Ǻ��汾�ݰ��Ͷ�����յ����Ķ̾��루����һ�������ٶȣ����������״�Ĺ�����Χ�����������������ô��ľ��롣����״������С�����Ա�����һ���㹻����ֻ����ƣ���ռ����ռ�����
�״�Ŀ������Ƿɻ����������������״�Ŀ��Ҳ�������ˣ����࣬���棬��ˮ���������������ý�壬�������ԣ�ֲ����ɽ����·�������������������Χǽ���������߸ˣ�������������ɽ�����꣬�������ԣ����ǣ����⣬�����������ǡ����˲�����ΧĿ���Լ����ĽǷ����״ﻹ����ͨ��ȷ����ʱ�䷶Χ������ı仯��ȷ��һ��Ŀ������ٶȣ���Ӿ����ٶ�ת�ƵĻز��ź���ȡ������Ƶ�ʡ������λ���˶�Ŀ���Ǻ���һ��ʱ���ڸ��ٻ�Ŀ��켣�����Է������е�Ŀ��ͷ������������ٶȣ���ȷ��������Ԥ��Ľ���λ�á���ȷ��Ƶ��״����ȷ��Ŀ��Ĵ�С����״�����������ܹ�ʶ����һ�ֶ�������͡�
�����������״���ɡ�ͼ1.1��һ���dz������Ŀ�ͼ��չʾ��ϵͳ�о������ֵ��״�����ʾ���������������Ϊһ�ֹ��ʷŴ���,������һ�����ʵ��ض���������ʹ�״�����ɡ�����ƽ�����ʿ���С�����ߵĹ��ʺʹ��������ء�(ƽ��������һ���ı��״�ķ�ֵ���ʸ��õ����֡�)��������״�ʹ�ö����岨������һ����������ʱ�乲����һ������Ϊ���ͺͽ��յĻ���
����˫�����Ĺ���������һ����һ�����߱����ڱ������н������ص����������ͨ��ֱ�ӽӵ��ز��źŶ����Ƿ������
�����豸�ܹ�Ӧ�ô����������ռ�,Ȼ���ռ������ջ�����Դ����������һ������������������������һ������խ�IJ����Լ������ⶨĿ��ķ��������ϴ���ָ�������խ����ͨ���Խ���������Ŀ��ز��źŴ�����ռ������߲������д��������Ͷ����ڽ��ջ���������,����Ҳ����Ϊһ���ռ��˲������ṩ�Ƿֱ��ʺ��������ܡ�
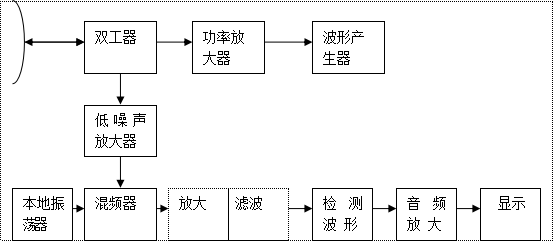
ͼ1.1��ͼ��һ���IJ�����ͼ�ϲ�����������һ����ͼ���²����������ջ����ʷŴ����״
�Ŵ�����������ź�����ˮƽ���Ա������Ĵ��ڡ������������״����������������Ϳɿ��ļ�����й���Ϣ����Ŀ��������ޣ���ȡ�Ա�����ʽ�ǽ�����������������������������״������Ƶ������Ӱ���״�����ͨ���Ǵӽ��յ�һ�α���Ϊ�������Ŵ���������ͼ1.1�����������״�Ӧ���е����Ƽ���Dz���Ҫ�ģ��ӿռ����״�ز�����Ϊ�Ӳ�����������Ҫ��һ���㹻��Ķ�̬��Χ�Ա�����ֻ���̽��Ļ��Ҳ�������Ӱ��ʹ�ƶ�Ŀ�귽����������͡�һ���������Ķ�̬��Χͨ���Էֱ���ʾ������Ϊ���������С���ʵ�ƽ�����źš�����ź�ˮƽ������Ҫ���ý��ջ��ķ�Ӧ�ǿ��������ģ���������Ե�Ӱ�죬�źŹ��ʺͽ��տ�ʼ���ͣ���ʼ���͵���͵��źſ�������С��̽���źš������������IF���֣�����źŴ�����ͨ���ǿ��ܻᱻ����Ϊ��һ���ָ����ĸ����źţ���ɲ��ֿ��ܽ��ͼ����������źš��źŴ��������������մ���������ź����˶�Ŀ�꣬�Ӳ������ӱȽ��������������źŴ�������ƥ���˲������������ȵı�ֵ���,����������һ���ƶ�Ŀ������һز��źŷ��뿪���������ɽ����������������ô�������������һ��Ԥ������ֵʱһ��Ŀ���Ǵ��ڵġ������ֵ����̫�����������������龪һ���������ֵ���趨���ᱻ����һЩĿ����ܴ�����,����ᱻ���֡����������ˮƽ�ľ�����������ֵ����ֵ��������һ���ɽ��ܵ��趨��ƽ��ֵ�ļپ�����Ϊ��������������
����������ȷ����һ������Ŀ��λ�õĹ켣����������ȷ��������һ�����ݴ������ӡ�Ŀ��̽����Ϣ������ɲ����Գ���,������Ϣ���ܱ������Զ���������Ŀ����״��������ܽ�һ���Ĵ����ṩ�����йص����Ŀ�ꡣ�״����ȷ�������ֵ��״���һ��Э��������ķ�ʽ�����������ṩ��ʱ�źŲ�ͬ���ֵ��״��Ҫ��
�����״﹤��ʦ�Ѿ�����Դ��ʱ�������õĶ����ռӹ���������Χ���ռ����һ���������߶������г���Χ���ܺ;�ȷ�������ⲿ����Ӱ���״����ܰ���Ŀ������;�ⲿ�������ܽ���ͨ�����߲���Ҫ�����һز��ź�����½�ء�������������ĵ�Ÿ�������,����ɢ�����ʹ�����Ӱ�����������ķ�Χ����Щ���ض��ᵽҪǿ�������������״�ʩ���г��ֻ������Ҫ����ơ�
�����״���������״������벻���ܹ���������ĸ߷��ڣ����������Χ�ڵ�ƽ��Ԥ�ڵ�Ŀ��Ĺ��ʣ�����Ҫ����һ���ʵ��IJ��κ��ض�Ӧ��������ȶ����źš��������������Ŵ���������ͨ���ṩ��������ơ�
�����Ѿ�������������״﹦��ԴӦ�����״�(��10��)���ſعܵĹ�������һ�ȷdz����е����ٳ������ú����״��22�£�ʹ�á����ڴſعܵ���Խϵ͵�ƽ�����ģ�һ��������ǧ�ߣ����ȶ��Բ����������ͨ�����ʺ���Ҫ����Ӧ���ڴ����Ӳ��ز������ƶ�Ŀ��С��Χ�ļ�⡣�ſعܹ���������һ������ν�Ľ�������ܵ����ӡ�����һ����صĽ�������Ŵ�����CFA������ʹ���ڹ�ȥһ���״����Ҳ��������Ҫ�״�Ӧ�õľ����ԣ��ر��Ƕ���Ҫ���ƶ�Ŀ������Ӳ����߹����ٵ��ܺ��в��ܣ�TWT������ν���������ܵ����ӡ����״ᆳ�����õĸ߹��ʣ������ʵ��Ŀ������Լ����õ��ȶ���Ҫ�Ķ����մ��������Ҷ����ܻ�ӭ��
��̬�Ŵ������羧���Ҳ�������״����������������Ȼ������ܹ�����Խϵͣ����������������е�ÿ����Ԫ�������ö���������ʵ�ָ߹����״�����Ӧ�õ�Ҫ����̬����ܷŴ�����ʹ��ʱ�״����ʦ�ܹ������ռ�ձȳ���������Щ�豸�в��������DZ���ʹ����Ҫ����ѹ�����Լ���ͬ���ȵĶ�������ʹ�ڶ����Լ�Զ����̽�⡣������ù�̬��������Ӱ��ϵͳ��������λ���״�ϵͳ���ں��ײ��ο��Եõ��ܸߵĹ�����������Ϊһ���Ŵ�������������������Ƶ��Ƶ�ʽϵ͵��״�������ֿ�������չ��������Ӻܳ�һ��ʱ��, ,���Ǻ�����Ӧ�����״��Ƶ�ʡ�
������Ȼ������ÿ���˶�����ͬ��, �����һ��ѡ��һЩ�״�ϵͳ����ʦ�ῼ���ٵ�����Ϊ��������ѡ�ˡ��������Ӧ���ִ��״����ʺ�����ʹ�á�
�����״����ߡ��״�����������ӵ��ⲿ���紫��(��12�¼���13��),�м���������;��(1)���з���������Ҳ����˵����ָ������һ����խ�Ŀ���ģ��;(2)�ռ���Ŀ��ӵ��Ļ�������;(3)�ṩ��һ�ֲ���Ŀ��ĽǶȷ���;(4)�ṩ�˿ռ�ֱ���(��������Ŀ��ĽǶ�);(5)��������Ŀռ䡣���߿�����һ�ֻ�еɨ�������߷��侵,һ����еɨ��ƽ����,���еɨ���ն����ߡ���������һ������ɨ�������ʹ�õ�һ�����һ�������ÿռ�Ĺ��ʷ����ÿ�����ߵ�Ԫ�����ɨ����������ߵ�Ԫ������һ��С��̬�������״Ҳ��Ϊ��Դ�������ÿ�����߶�������ص����ƺ;����͡�һ����˵����Խ��Խ�ã�����������ʵ�ʵ��������ģ��
1.2�״�����
��Ȼû�е�һ�ķ�ʽ���������״�,������������ô���Ŀ���������Ҫ�������������ij���״
���������״����һ�����伸�����������ظ�ϵ�е��״����һ���״�û����˵�������������ܱ���Ϊһ���淶����ʽ�״
�� �߷ֱ����״�����״�ɻ�ø߷ֱ��ʵķ�Χ���ǡ���������ٶ�����,��ͨ����ζ�Ÿ߷ֱ����״���и߾���ֱ��ʡ�һЩ�߷ֱ����״��з�Χ�ķ�������һ���ߵĿɴ��С�����ס�
�� ����ѹ���״����һ��ʹ�ó������ڵ���(ͨ��Ƶ�ʻ���λ����)��õ���������ĺܳ�һ��ʱ���������ж��״
�� ������(CW��)���״����״�ʹ����һ�����������Ҳ������������������ƶ�Ŀ��������Ŀ������ٶȶ�����Ƶ�ơ�
��Ƶ�������״�����״���õ�Ƶ�������IJ��ε���������Χ�ڵIJ�����
�����״��Ȼ�ֵ䶨����ӿ��ܲ������������״���һ���ܹ���������һ��Ŀ�꣨��ɻ�������ȷ���䷶Χ�ͽǶ�λ�á���Ҳ���Թ۲�һ��ʱ�䣬�Ա�ΪĿ����������
�ƶ�Ŀ����ʾ�״MTI�������״���һ�������Ӳ��м���ƶ�ʹ�õ������ظ�Ƶ�ʣ�PRF����ͨ��û�о���ģ����Ŀ�ꡣ���ڶ���������������ν��ä�����ٶȡ�
����������״�����״�����������������״���Բ��������е������ظ�Ƶ�������״���Ƕ�ʹ�ö�����Ƶ������ȡ�˶�Ŀ��ġ����ظ�Ƶ������������״�û�к���֮����ä���ٶȣ�������ȷʵ�о���ģ����һ��PRF����������״��������ڷ�Χ�Ͷ����պ���֮����
�����״����һ���ṩ�˸��ٻ�켣��Ŀ���״�����״���Խ�һ������ΪSTT��ADT��TWS������������������������
��Ŀ����٣�STT���״���״�켣�ϵ����������ṩ�㹻����Ŀ��ľ�ȷ����һ��Ŀ�ꡣ�ڳ�ȡ��ʱ��Ϊ0.1�루ÿ��10�����������ʣ������������͵��������ʹ���ڵ�������ٵĽǶ�ȷ������Ϣ��Э��������
�Զ������٣�ADT���״���Ǹ��ټ����״���С�������ͨ��ʹ��Ŀ��λ�õIJ��������ߵĶ���ɨ���õĸ���Ŀ���кܴ����Ŀ�����������ʲ���STT�ߡ�����ȡ����Ӧ����ɨ��ʱ����ܷ�Χ��1��12�롣
���ٱ�ɨ�裨TWS���״ͨ�����״����ͨ���Ƕȵ���խ�����һ������������ļ���Ա����ṩ�����ٸ��������ĵ����Ĺ۲�Ƕ����е�Ŀ��λ����Ϣ�״�������ڹ�ȥ������״ָ���ɻ��������ijЩ���͵����������״�Լ�һЩ���»����״
���������״һ�ֵ���ɨ��������������������������������ʴ���Ŀ�ꡣ������ͬʱ�ṩ���͵���������ADT���ƵĶ��Ŀ����и��١�
�����״���״��������Ե�������һ���֣�һ��һ��Ŀ���һ�����������������ͨ��������Щ�״���ƶ�ƽ̨��
���������״�(SLAR)���ú������������״�߽����ȵķ�Χ�ͻ�ú��ʵĽǶȷֱ��ʲ���ϸ�������ߡ�
�ϳɿ��״SAR�������������ƶ��ij�����ʹ�õĻز��źŵ���λ��Ϣ��ɳ����״��ȡ����һ������������Χ�ͺ�������ֳ��ĸ߷ֱ��ʵ�ͼ��Զ����ֱ���ͨ����������ѹ����á�
��ϳɿ��״ISAR����ISAR��һ������ij����״��ʹ�ÿ�߶ȷ�Χ��Ŀ������˶��ڶ��������������и߷ֱ��ʻ�á����������ƶ��ij���Ҳ�����Ǿ�ֹ�ġ�
���������״������ͨ��Ӧ������һĿ�����ٶԿ�Ϯ�ķ���ʹ�á�
�Ƶ��״��ͨ�����ڵ�����Ŀ����״�ʹ����������������������
���������۲⡣�����״�̽�⣬ʶ�𣬲�����ˮ�ʣ����ٺͷ����Լ��۲�������������������ζ�״��źŵ���λ����Ϊ�״��������Ҫ��һ���֡���Ҫ������;����Щ������������״�����������״�Ĺ��ܡ�
�����������״����һ������۲��״�����˶�����Ƶ��ͨ�������ƶ�Ӱ�죬��ȷ�������ɵķ����б䣨���ڲ�ͬ�ķ��磩������Ա�������������»�����Σ����������磬�Լ��������������Ӱ�졣
Ŀ��ʶ����ijЩ����¿��ܱ�����ʶ����Ŀ�����ͱ��״�۲⣨���磬��������������ȷ�ϵ��ض����͵Ķ�������������һ�������������������Ǿ�ʯ���������һ����ʶ�����ֶ�����һ��Ŀ�����֣������ھ���Ŀ����ͨ������Ϊ�ǹ�ͬĿ��ʶ��NCTR���״���ʶ��ϵͳ�ĺ�������IFF������ʶ���ⲻ��һ���״��Ŀ��ʶ���漰һЩ��Ȼ������һ���֣����״�ͨ������ΪԶ�̣��������״
����״��������״�ÿ���˿������ṩһЩ�״�Ĺ��ܣ���ô����״�����ִ�ж�������Ĺ���֮һ��ͨ��������ʱ���ϵ�һ�ι��ܹ����Ļ�����
�������������ķ����������״���Ӧ�ã��������أ������գ����أ��ƶ��������䣬���н�ͨ���ƣ����£������棬������Զ�Ӿ࣬�����DZ������⣨���״����Ƶ�����侭Ӫ��UHFƵ�Σ�SƵ�εȣ��ȵȡ�
1.3�״�Ŀ�����Ϣ
Ŀ��������й���Ŀ�����Ϣ�Լ���ü�ֵ����ͬ��û��Ŀ���̽�����Ϣ��û������ġ�
��Χ���봫ͳ�״��������������ص������ܹ�ͨ�������źŴ�������ĵ�Ŀ����ٶȺͷ����״�ʱ����ȷ��Ŀ�귶Χ��û���������������Բ�����ȷ������Զ���״�ľ���Զ��Ŀ����ȣ����������ɶ���Ϣ�Ĵ����ٶ�Զ�ľ��뾫�����ޣ������ʶȷ�Χ�ھ��ȿ����Ǽ����ס�Ϊ�˲�����Χ����ʱ���־��Ҫ�����˴��䲨�Ρ�ʱ���ǿ�����һ�������壨1�źŵķ��ȵ��ƣ�������Ҳ�����Ƕ��ص�Ƶ�ʻ���λ���ơ�һ����Χ�IJ�������ȡ�����״��źŴ��������㷺�Ĵ����������ȷ�ԡ���˴�����Χ��ȷ�Ļ�����ʩ��
�����ٶȡ�һ��Ŀ�꾶���ٶ��Ǵ�һϵ�еı仯����һ��ʱ�ڡ���Ҳ���Բ�ȡ�Ķ�����Ƶ�Ʋ����������ٶȵľ�ȷ������Ҫʱ�䡣���ʱ���ǻ����������������ٶȲ�����������
�Ƕȷ���һ��Ŀ��ķ���ȷ���ɽǷ��������ٶȿ��ж��������Ĺ�����Դ���һ��ʱ��Ŀ��λ�õ��״�������֡�һ��ȷ���ķ���Ŀ��ķ�����ͨ��ȷ���Ƕ�����Ļز��źŴ�һ��ɨ�����ߵķ��������ġ���ͨ����Ҫһ������ϸ���������������ߣ����ߡ�һ�ֿ��м�������ת���߲����״���������ַ�ʽ�Ƕ���һ��Ŀ��Ƕ�Ҳ���Ծ���ʹ���������߲��������ڽǶ���ȡ�����Ȼز�����ÿ��ʹ�á��IJ�����Ҫ���������λ�Ǻ����Dz������ڵ���������״�ĵ�9�����۵���һ���ܺõ����ӡ��ǶȵIJ�������ȡ���ڵ������ߵijߴ磬���ڸ������������ߵĴ�С��
����С����״������״��ڷ�Χ��Ƕ��㹻�ߵķֱ��ʵ��������������ṩ�ڸ߷ֱ��ʵijߴ����Ŀ��ij̶ȡ���Χͨ������Э���õ���������佻�淶Χ�����������߲������ȳ��Է�Χ���������ú�խ��������õġ����ǣ�һ�����߲����ǿ��������ģ����Ժ������ֱ��������ַ�����õIJ��������ֱ��ʺá��ܺõĽ�����淶Χ�ߴ����ͨ������Ƶ��,����SAR(�ϳɿ��״�)�����(��ϳɿ��״�ϵͳ),�ڵ�17�¡�Ӧ��������˶���Ŀ����״�Ϊ�˻�ý��淶Χ�ֱ���SAR�Ͳ������ھ����㹻�ķֱ��ʺͽ��淶Χ�Ĵ�С,�������Ի��������������ϵ��,��Ŀ����״��ʱ���Էֱ档
�״��������Ҫ�ԡ����������ϴ�������Ϣ��������Ƿdz���Ҫ�������״�Ӧ�á������ִ����״��õ������͡�һ�����źŴ����������ź��������ȷ���Ĵ������κ��ڲ����źŵ��ơ���һ���ǿɵ�������һ����˵һ���������źŴ��������Ҳ���ʱ��1/����(����ѹ������,�ڵ�8��������,�ͻ��и���Ĵ�������ع�ϵ,���DZ�������ȡ�) ���������Ҫ�����һϵ��ָ�꣬�Ա�ȷ������ΧΪĿ��ʶ���Ŀ�����ͼ����������ṩ��һ������������Զ����ֱ���Ҳ���������õļ��پ�����ν�ĸ��ٲ����״������Ĺ���ʱ���ӳ٣��״ﷶΧ֮���˫���źţ��IJ���Ϊ�����ķɻ��߶�,����ʱ��(��Χ��)֮���˫��ֱ���źŴ��״�Ŀ���˫�����ɢ���źŴ��״�Ŀ�����(Ҳ��Ϊ���),��������Ŀ���ź����Ӳ����ʡ��ھ���ϵͳ��Զ����ֱ��ʿ����ڼ���IJ����Լ��ܼ����η��еĺ���������ʶ�ͶԿ�ijЩ�����Dz��ɿ���ʽ��
�����ɵ�ʽ�������ṩ����,�Ըı�(Ƶ��)�״��źŵ�Ƶ�ʷ�Χ�ܿ���Ƶ�ס�����Ա������������ĸ����״�,����ͬ��Ƶ������,�Լ�����ͼ�õжԵĵ��ӶԿ���Ч������Ƶ��Խ��Խ����ù㷺���źź㷺�Ŀɵ��Ĵ�����
���������ṩ�Ĵ����������״������������Ƶ�Ƶ����������������������ͨ��ίԱ�ᣬ�����ϣ����ʵ�Ѷ���ˣ����ڵڶ��������ս�е��״�ɹ�ʹ�ú��״ﱻ������ӪԼ����֮һ����Ƶ������֮һ���ϡ�����Ƶ�ռ��Ѿ���������ͬ��������ʱ��Ƶ�׳��ֺܶ���ҵ�û�����Ҫ���������������Ų��ס�����״﹤��ʦ����Խ��ԽС�Ŀ���Ƶ�ռ�ʹ������䣬�����������״�Ӧ�õijɹ�������Ҫ��
�ź�����ȡ������״�����ľ�ȷ���Լ�Ŀ��Ŀɿ��ļ����E/No������E�ǽ��յ����ź������������״ﴦ����ȡ����No ÿ��λ�������������������ʡ����E/No���״���������Ҫָ�ꡣ
��ǿ�볬��һ��Ƶ�ʡ��������������״��ܹ������ڳ���һ��Ƶ����Ҫ�����ơ�Ƶ������ͨ����ָ�ڶ��Ƶ����ʹ�����������Ļ�����Ƶ�ʷּ�ͨ���漰���Ƶ����һ�����ϵ��״ﲨ������ʱʹ�������Զ��Ƶ�ʶ����Կ���������ÿ��Ƶ��ͬʱ��ͬʱ���������ڼ������е����ÿ��н�ͨ�����״���������Ƶ�ʱ仯�����Dz�����ʹ��Ҫ��Ķ����մ�����̽���ƶ�Ŀ����Ӳ�������Ƶ�ʶ����Կ��Լ��ݡ�����������ԺͶ������ж���������������еĴ����и����Ƶ�ʷ�Χ
��������䡣һ���״������һ����һƵ�ʿ��ܵ��²���ṹ����������ֱ���ź�֮��ĸ��ţ��״�Ŀ�꺣��ģʽ���ͱ���ɢ���źţ��״��ɵ�����浽Ŀ�꣩����Ƭ״�ṹ�����ǵ���˼�ǽ�����һЩ���ǣ���ֵ���ͣ����棩�����Ƕ������ź�ǿ�ȷ�Χ����Ƶ�ʱ仯���ı����Ǻͱ����λ�ã�����ͨ���ڽϿ���Ƶ�ʷ�Χ�ڹ������ں��ο�����д���״ォ��̫����ʧȥһ��Ŀ��ز��źš����磬�Կ���Ϊɭ��ʵ�飬��֪���״�����������850��1400�գ���ʾ��ֻ��һ��Ƶ��ʹ�ã���ʱ����ɨ���ʣ�ʵ���õĵ�ɨ��̽����ʣ�������Ҫ����0.78�ر�����á����״����ĸ���ͬ�IJ���Զ��Ƶ�ʣ���ʱ����ɨ�����Ϊ0.98������Ƶ�ʼ����������ӡ�
�������ӵ�Ŀ��̽�⡣һ������Ŀ���״�ɢ�������ɻ����ֿ����кܴ������Ƶ�ʵı仯����ijЩƵ�ʵ��״�ɢ����潫�Ǻ�С��Ļ�ܴ������һ����һ���״﹤��Ƶ�ʴ����˼����ܻᵼ��СĿ��ز������ͨ���ڲ�ͬƵ�ʵļ������������ͬ����С���һ���ɹ��ļ������ֻ��һ��Ƶ�ʵ�ʹ�ñ�ø������ס�����һ��ԭ�����п��н�ͨ�����״����������Ƶ�ʼ���㹻����Ƶ������ȷ����һĿ��Ļ�����أ��������Ŀ����ԡ�
���ٵжԶԲߵ���Ч�ԡ��κξ����״�Ҫ�ɹ���һ������Ԥ�ڵĵжԶ��ֲ��öԲ��Լ�������Ч�ԡ��������ֻ��һ��Ƶ�ʱ��ںܿ���Ƶ�ʷ�Χ���ѵöࡣ���������ţ����ϱ仯�IJ���Ԥ֪�ķ�ʽ�Ϲ㷺��Ƶ�ʸ��ŵ�Ƶ�ʻᵼ�²��ò���ɢ�ڽϿ���Ƶ�ʷ�Χ�Ĺ��ʣ���˻���ٵжԸ����״��źŵĴ������ź�ǿ�ȡ�Ƶ�ʶ������ںܿ���Ƶ��Ҳ��ø������ѣ������Dz����ܵ����صжԽ��������䵼���������Ͷ�λ�״��źš�
���״������Ƶ�ơ�������Ƶ�Ʊ仯����Ҫ����ʶ�����״����岻�õڶ��������ս���Ϊ�����״��Ӧ��������Ҫ�����ء�����������ִ��״ォ������Ȥ���ж�����ЧӦ��������Ƶ��fd����дΪ
fd =2vr /��=��2vcos�ȣ�/��
ȫ�ױ�ҵ��������ֳɳ�Ʒ��������ѯ�źţ�biyezuopinvvp QQ��1015083682
������ҳ
��ת����ע����Դ��www.biyezuopin.vip
