|
es New Roman"; font-size: 12pt;'>[15] 王平 某雷达天线座车液压调平系统[J].电子工程,2004,3:11-17
, 1课题研究目的和意义
随着我国军事科技的发展与进步,舰载平台机构在军事领域也拥有了飞速的发展。由于船体在海面上受风,浪,流的影响而发生周期性的横摇,纵摇和艏摇运动,安装在船上的通讯系统的外壳由于和船载平台刚性连接,就将跟随船体发生同样幅度的摇摆运动。从而使通讯系统的正常工作受到影响。因此,必须采取稳定措施使通讯系统与船摇扰动相离,这就是使通讯系统安装平台的稳定问题的意义所在。
舰载雷达稳定负载平台基本工作原理,结构类型,以及驱动系统各种形式,对舰载雷达伺服稳定负载平台进行了详细的结构设计,对其纵横摇摆轴,及方位轴的转矩进行了详细的计算,并进行了校核。驱动元件均采用安川系列交流伺服电动机,并与减速器连接使用,以满足其对扭矩的要求。
舰载稳定负载平台可以为船用通讯提供安装平台,所以,舰载稳定负载平台的设计在实际应用中也同样存在一定的意义。
因此,必须采取稳定措施使通讯系统与船摇扰动相隔离,这就是舰载雷达伺服稳定负载平台设计的意义所在。
2国内外研究现状
随着科技的不断发展,现有稳定负载平台的性能参数已无法满足实际需要,为此,要进一步开发性能优越的新一代产品,以满足需求。本设计题目:舰载雷达伺服稳定负载平台设计。设计要求如下:
(1)根据计算的三轴转矩确定工作元件。
(2)传感器要求反应灵敏,能够通过不同的运动状态实现反馈。
(3)实现简单的三自由度的运动,包括横摇、纵摇、艏摇的三向运动。
X轴位于平板之下,因而平板作为X轴负载,然后平板和X轴位于Y轴上方,因而平板和X轴又作为Y轴的负载,最后平板,X轴,Y轴又作为方向轴的负载。方向轴放在最低处,由于方向轴上的负载是沿着方向轴的方向,因而无偏载力矩,有效地减少了Z轴的扭矩,使系统精度和稳定性有很大提高。综合考虑过各种方案的利弊,通过比较采用此方案较好。
(1)电动机的选用
常用的驱动元件有:电动机,液压马达和气动马达。其中电动机又包括:直流电动机,异步电动机,步进电动机,小功率同步电动机等
经比较,本设计采用的是交流伺服电机。交流伺服电机是一种适合于控制的电机。此电动机功率质量比大,功率因数、效率高,综合性能指标好
(2)稳定负载平台的选用
可选用纯铝、防锈铝、硬铝、超硬铝。本次设计选用铸造铝合金ZL101,小部分部件选用ZL105。
(3)传感器的选择
ZCTX2AL-485系列倾角传感器体积小;重量轻;高性价比,易于安装;提供多种输出信号;支持各种电源电压,工作范围广。
主要可用角度测量,水平调整,零位调整;安全控制,监控,报警;机械臂,建筑,桥梁角度测量;对准控制,弯曲控制;初始位置控制,倾角姿态记录仪。
3拟研究的研究路线
(1) 选取电动机,确定类型,型号,进行计算与校核。
(2) 选取传感器,包括产品的基本概述与应用,进行细致的分析。并且结合 应用,列出技术参数表。
(3) 确定稳定负载平台的选取与设计,包括自由度的确定,并于其结合。
(4) 确定工作平台的设计。
(5) 完成X Y Z轴的设计,并对其进行校核。
(6) 完成零件图,实物图,剖面图。
4进度安排
2018年3月2日―2018年3月20日 确定题目,下达任务书;学生调研、 收集、查阅资料、完成开题报告。
2018年3月21日―2018年3月30日 舰载平台科台的总体布局及工作原理 进行分析分析
2018年4月1日―2018年5月15日 结构组成进行综合性设计,其中横摇、纵摇与方向转动相关零件的设计
2018年5月16日―2018年6月6日 整体装配图的绘制以及相关设计的计算整理
2018年6月6日―2018年6月14日 准备答辩
6文献综述
6.1 舰载稳定负载平台设计背景
舰用雷达天线稳定负载平台系统为天线方位角提供准确的水平基准,是影响雷达战术技术性能的重要组成部分之一。
舰船在水面上运行时纵摇、横摇都要发生改变,舰载平台用于补偿舰体的纵横摇角度,同时还要克服摇摆运动导致的惯性力矩。纵摇、横摇的改变对雷达的性能影响很大,影响搜索区域、减小捕捉目标的概率、降低雷达的作用距离和测量精度。船稳定负载平台是为了提供舰船测量仪器的摆放载体而设计的平台,是为了克服舰船在大海中航行时由于受到海浪的横向和纵向的冲击而使测量仪器不能在良好的工作坏境下工作而设计出来的,能防止舰船在横向和纵向和在航行方向的偏斜情况下对摆在平台上的测量仪器的不良影响。因此必须将天线装在能够弥补舰船纵摇、横摇的稳定负载平台上。
稳定负载平台有两根轴,纵摇轴与舰首尾线垂直,横摇轴与舰首尾线平行,在纵摇和横摇轴上各有一套伺服驱动装置和轴位传感器,驱动装置驱动纵横摇传动装置及其负载绕纵摇轴和横摇轴做圆弧往复摆动,摆动幅度由轴位传感器控制。
舰用雷达,尤其是舰用警戒雷达,其天线及其稳定转台系统一般都安装在舰船的桅顶,所以其执行元件、传动机构重量越轻越好。由于要求重量轻,结构刚度就差,而天线安装在平台上旋转,风负荷变化很大,所以稳定负载平台的使用特点可归纳为系统刚度差、负载扰动大、控制精度要求高稳定负载平台按其工作环境可分为:车载稳定负载平台、舰载稳定负载平台和机载稳定负载平台等几类。按其驱动方式可分为:电机驱动稳台和液压马达驱动稳台。其中,电机驱动稳台又可分为:直流伺服电机驱动稳台和交流伺服电机驱动稳台。
6.2驱动系统设计要求
舰载雷达稳定负载平台的驱动系统应满足以下要求:
(1) 根据舰船的摇摆幅度和摇摆周期,稳定负载平台的纵摇和横摇驱动系统应使天线获得所需要的摇摆范围、摇摆角速度和角加速度,以补偿舰船的摇摆运动。
(2) 稳定负载平台的驱动系统应具有良好的传动性能,工作要可靠,维护要方便。
(3) 稳定负载平台应具有足够的稳定精度。对于舰载警戒雷达来说,稳定误差通常要求摇摆范围小于0.2°。
(4) 稳定负载平台应具有足够的强度和刚度,布局要合理,结构要紧凑。
(5) 尽量减轻稳定负载平台的重量,以利于降低平台的重心,提高舰船的稳定性。
稳定负载平台驱动系统的传动形式
舰载雷达的稳定负载平台通常由纵摇驱动装置、横摇驱动装置、同步传动装置、平台、框架(或十字架)、基座等部件组成。雷达稳定负载平台驱动系统的传动型式及其特点概括如下:
(1) 采用多级圆柱齿轮传动
圆柱齿轮机构结构简单,加工方便,容易达到较高的经济加工精度,传动效率高,工作可靠。但是,当传动比很大时,传动链的级数多,因此驱动装置的体积大,结构笨重。
(2) 采用扇形齿轮传动
扇形齿轮实际上是圆柱齿轮的一部分,它具有与圆柱齿轮相类似的特点。由于运动范围较小,用于末级传动的大齿轮不采用圆柱齿轮,而采用扇形齿轮,这样有利于减小齿轮机构的尺寸,减轻它的重量。
(3) 采用圆锥齿轮传动
圆锥齿轮机构结构简单,加工比较方便,但它存在轴向安装误差和轴间角度误差,工作时会产生轴向力。因此,一般用于需要两轴相交、传递的转矩不太大、精度要求不太高的场合。
(4) 采用滚珠丝杠传动
滚珠丝杠传动机构的传动比很大,重量轻,传动效率和传动精度高。它的应用对减轻稳定负载平台的重量起了重要作用。下图为某稳定负载平台滚珠丝杠副的组成。
其他传动相比滚珠丝杠传动具有许多优点:
首先因为纵横摇传动装置的负载大,转速低,要求传动功率大,速比大。而滚珠丝杠副的导程小,降速比大,如要得到相同的牵引力,所需的扭矩与齿轮、齿条传动副相比较要小。
其次滚珠丝杠机构体积小、重量轻,有利于减轻整个稳定负载平台的重量;而且丝杠两端可以加上蝶形弹簧,丝杠机构本身就具备限位和缓冲功能,可以使整个稳定负载平台的结构大为简化,有利于稳定负载平台的小型轻量化[9]。
再者滚珠丝杠机构的精度高,有利于提高整个雷达的精度。如采用带有预紧装置的滚珠丝杠副,丝杠与螺母间的轴向间隙可以为零,这是其他传动装置很难实现的。即使采用不预紧的滚珠丝杠,因为纵、横摇摆范围较小,丝杠的有效行程很短,丝杠轴向间隙可以控制在0.01mm以下,重复定位后的间隙在0.003~0.01mm之间。这对整个稳定负载平台精度影响不大
还有滚珠丝杠机构的摩擦力小,这将大大减小启动扭矩和运动扭矩,传动效率高(理论上可达90 %~96 %)。
(5) 采用双万向铰链传动
雷达稳定负载平台的纵摇驱动系统采用了双万向铰链传动。如图(1)所示:
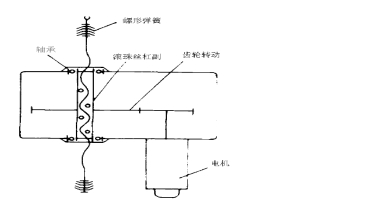
图(1)滚珠丝杠副的组成简图
那一部分设置在稳定负载平台的基座上,另一部分设置在十字架上,前者的输出轴与后者的输入轴用双万向铰链联接起来。这样可减轻十字架的重量,降低稳定负载平台的重心,提高驱动装置的支座刚度,改善系统的动力性能。
(6) 采用由纵摇轴和横摇轴构成的十字架
采用由纵摇轴和横摇轴构成的十字架。由基座、十字架和平台组成的机构在结构型式上就是万向铰链。其工作原理与通常采用的纵摇和横摇框架的工作原理相同。十字架结构紧凑,刚度高。
(7) 采用机电式驱动方式
机电式驱动通常具有工作可靠、设备量较小、维修方便等优点。对于机电式稳定负载平台,选用体积小、重量轻、能满足实际使用要求的驱动电机,是减轻其重量的主要措施之一。由兰州电机厂推出的1FT5型交流伺服电机和由天津科尔摩根工业驱动有限公司推出的新型无刷系列伺服电机具有相类似的特点,这类电机功率密度高、体积小、重量轻、转子惯量小、过载能力强、转矩转速特性的线性度好,可带有制动器、测速机和编码器,能满足舰载雷达舱室外设备的环境要求。这类电机的应用对于减轻稳定负载平台的重量是非常有利的。
(8) 采用液压传动
纵摇和横摇框架分别由纵摇和横摇液压伺服油缸直接驱动,传动链短,工作平稳,承载能力强。但液压传动要有油源机柜,产品的设备量大、成本高。此外,油的渗漏现象经常出现,增加了维修工作量。
参考文献
[1]张毅 基于内模原理的舰载雷达稳定负载平台控制 [J].雷达与对抗,2014.3
[2] 李晓东,张庆红,叶瑾琳.气候学研究的若干理论问题[J].北京大学学
报:自然科学版,1999,35(1):101-106.
[3] 梁璐 舰载稳定负载平台振动分析与稳定设计.机电信息 2011.21
[4] 柳世华 舰用警戒雷达抑制研究[J].雷达与对抗,1995.3
[5] 李秋霞 舰载数据通信天线稳定负载平台系统研究.哈尔滨工程大学,2008
[6] 蒋同兴 舰载雷达稳定负载平台系统.雷达与对抗,1991
[7] Stiffel T A.self adjust leveling means :US 2942829[p].1967
[8] Pollard W.L.G Spray Painting Machine:US 2213108[P].1940-8-26
[9]黄真,李秦川。两种新型对称五自由度并联机器人机构[J]。燕山大学学报
2011.25
[10] 建戴生 可变机构和他的位型模型,机械工程学报.2013,13(3)
[11] 邓彪 机动发射系统快速自动调平探讨[J].飞航导弹,2012(9):50
[12] 闫文辉 石油机械[J]2006,34(9):20~24
[13] 盛英 六点支撑液压平台自动调平系统[J]。液压与气动,1999(4)24~26
[14] 李忠于 雷达自动调平支撑腿力学工况分析[J].火控雷达技术,2007,36(2)
|
