|
1. ��ϱ�ҵ��ƣ����ģ�����������������������ĵ��������ϣ�ÿ��д����������
1.1�����
����ȫ������������Խ��Խ�ߣ���ԴΣ�������ٽ������ͬʱȫ��Χ�ڶ��Ӽ�����������Ƶ��Խ��Խ�ߣ����ǵĻ���������ʶ�õ�������ߡ�ȫ��������Һ��������Խ���������Դ����������Խ��Խ��Ĺ�ע������֧�֡����綯�γ��������ŷŵ�����Խ��Խ�ܵ��������������ӣ�����������Ҳ���Ӵ�Դ��綯�γ��з���Ͷ�롣
���ڴ��綯�������ԣ���������Ĵ�С����Ӱ�������������ɱ�����Ӱ�촿�綯��������ʻ��̡���û�е�ظ���������£�Ϊ��ƽ������֮���ì�ܣ���ߴ��綯�γ������������ʳ�Ϊ�����һì�ܵļ���·����������������ʵ�;����Ҫ�����֣�
�������ڴ�ͳ����������ٱ������ṹ�����ϵĸĽ�����Ҫ��ʩ��ͨ���Ż���������ƥ��Ϳ��Ʋ��ԡ�������������ơ�������̥�������ƶ��������ռ�����
����Ǵ��綯�γ��¹��͵��о�����Ҫ�Ĺ����е�������ٱ�������˫���˫��������˫�����ϵ�����������챵��������
����Ǵ��綯�γ��¹��͵��о�����Ҫ�ɵ�������ٱ�������˫��������������챵��������
��������������Ƚ����Ե�ȱ�㣺��һ�����������һ��������ֹ��ϣ�����������ʻ���ڶ�����ƥ�������Ҫ���������Զ������ܵ����������ѡ�ıȽϴ����׳��ִ�����С������������������˷ѡ�
��˫����������ϵͳ���Ժܺý��������⡣���ȣ�˫����������ϵͳ��Ϊ�ද��Դ����ϵͳ����һ������Դ���ֹ��ϣ���һ������Դ���Ե���������������Σ�˫����������ϵͳ����ʵ�ֶ�������ģʽ������ÿ�����������С����������ߵ�������ʣ��Ӷ�������������ԣ����ӵ綯��������̡���˫����������ϵͳ�Ƚϴ�ͳ����������ĵ綯���Ķ���С����ʵ�����������ҿ�����Է��㡣
���嶥��
1.2���������״
1.2.1�����о���״
����ѧ��T.Holdstock��A.Sorniotti'"�����һ�����͵�˫������������ʹ��綯�γ��Ŀ��Ʋ��Ժͽ���DZ�������о����ڿ��Ʋ�������������Զ�̬��DPCF(DynamicPerformance Cost Function)����Ծ�̬��ECCF ( Energy Consumption Cost Function )���������е���������ģʽ���Ż���
Ӣ��Vocis��Rinderknecht,S�����˫�����������ʹ��綯���Ĺ��ͽ����������о��������Եش�DCT�Ľṹ�м�ȡ�����Ƴ���˫�����������¹��ͣ�����������������;�������������ơ�
��������ѧ��ѧ�߳����о���˫ǣ���������ڵ�����ľ����Ծɱ�����ѧ��ѧ��Nobuyoshi Mutoh���FRID�͵�˫��������������͵Ĵ��綯���ķ�����������������ѧ���ԵȽ����������о������ڵ�ͬ�ô�ѧ���������������Ҳ��˫�����������ʹ��綯�������о�������
�����۷��棬�ձ���Nobuyoshi Mutoh��˫��������������͵Ĵ��綯������������ѧ���Ժͷ��������������о�������ѧ��Kim�Ƚ���˫��������ϵ��������ʱ�Ľ���DZ����T.Holdstock��A.sorniott��һ�ֵ綯������˫�������ϵͳ���������Ʋ��Ժͽ���DZ�������˷������ö�̬�����;�̬�����Ե������ģʽ�������Ż���ơ�
�ڲ�Ʒ���棬��������˹����˾������һ�ֵ綯����˫�����������ר�����ù����������������������������ڰ�װ�������ŵ�����ʵ��ͬ��ã�ʵ���˵���������ŵļ�����ơ�
Ӣ����VociS Ltd��������ڴ��綯��˫��������ı�����������������������Ϳ����˫�����������ϵͳ���ù�˾�����ѧ���������̺������������ֹ��͵Ŀ��Ʋ����о����������鹤����
Paul Waker�о���һ�ֺ�����װ�õ�˫�����������ṹ����Դ������ṹ�ij��ִ����Ⱥͱ���װ�õ��л�ʱ������Ż��������Ӷ��ڶ����Ժ���Դ������������õ���ߡ�Zhang S�о���˫�������������͵������������ԣ�Ӧ�ö�̬�滮�㷨������ſ��Ʋ������Դ��������͵������������иĽ���ͨ����������ó����㷨�ܹ���Ч��������ϵͳ��������ġ�Tseng S K�о���һ�����Ͳ���ʽ��˫�������ϵͳ�Լ������������ԡ�����ʵ����������ڶת�ٷ�Χ��������ת�أ��ڶת���⣬ͨ�����������·�����������ϵͳ�����Ը�ת�ص������Alipour H�����е�����������ֶ������綯�����IJ��������ƽ����о���ͨ��������۲������ģ���������������һ���µ��ٶȿ�������ƣ�����ͨ�Ļ���ģʽ������ʵ�ָ��ӿ��ټ�ȷ�Ŀ��ơ�
�ڲ�Ʒ���棬��������˹����˾������һ�ֵ綯����˫�����������ר��(ͼ3)���ù���������������������,��������ʵ��ͬ��ã�ʵ���˵���������ŵļ�����ơ�
ͼ1��˹����˾˫�������ͼ ͼ2 Vocis˫�����������ͼ
ͼ3 Vocis˫���װ��ʾ��ͼ
Ӣ����Vocis Ltd��������ڴ��綯��˫��������ı�������ͼ2��������������������Ϳ����˫����������ϵͳ����ͼ3��ʾ���ù�˾�����ѧ���������̺������������ֹ��͵Ŀ��Ʋ����о����������鹤����
1.2.2�����о���״
��ǰ���������˫������͵Ĵ��綯�γ����о�������̽���Ρ��ֽ���Ҫ������һ��������о�����δ�Դ˽���ϵͳ�о�����Ȼ�����¹��͵��о�����δ�����������ִ��綯�����¹����Ѿ������˰���Tesla, Vocis�ͱ�������Դ���ڵIJ��ִ��綯���������з���ҵ�����ӡ�������ҵ����¹��������˷���ר��������ǰ����ҵ��Դ˹��Ϳ�����ʵ����֤��Ʒ��
����������ѧ����괺�ȿ�չ�˶�˫������ʹ��綯����������ʽ���о������о��Ŷ��з���ת�������ʽ��ת�������ʽ�������ģʽ��ʵ�ֻ�����ͨ������Ż�����Ʒ�����һϵ��˫�������������綯���¹��ͣ�Ϊ�����߽��вο��о��ṩ�˷����ָ�����ݡ�
������ҵ��ѧ�����塢���ڵµ����һ��˫������ʹ��綯�γ������˳����IJ���ƥ���о�������ƥ������ʾ˫������ʹ��綯�γ�����ڴ�ͳ���;���һ���ľ��������ơ�
����ΰ�����������˫��������������������͵Ļ�еʽ����Ӧ��������ͨ�����Ի�ʵ�ְ���С�ܺĽ�ת��������������Ұ��ᡣ��ʤ������˻��ڷ�ʱ���ƵĴ��綯˫��������������Ʋ��ԣ�ͨ�����������֤�˷����Ŀ����ԣ��Լ�����ڵ��������ϵͳ�ڶ����Է��������������ѩ���˫�����������ṹ�о���һ��Ч��ƥ���빦��ƥ�����ϵĶ���ϵͳ����ƥ�䣬�Թ���ƥ����Ϊ������Լ����������Ч��ƥ����Ϊѭ��������Ч���еľ�����ƥ��Ŀ�ꡣ����о������ֶ���������챵�������ȶ��Ժͽ��ܿ��ƣ���������·��ʶ�����������������ת���ƣ��Լ����������ƶ��Ľ��ܿ��Ʋ��ԡ�
�ڲ�Ʒ���棬���ںܶ��У�Լ�������������ϵ�е�ר����Ʒ�������õ�����������Ϊ�������װ�á�
ר�������Ϊ201210024534.9�ı�������ѧ�����һ�ִ��綯����˫�����������(ͼ4)���ù��������������ͬ��˫��üӳ�Ȧ��ֹ�Ľṹ��ʽ��ͨ����������Ϻ�������Ŀ���ʵ�ֲ�ͬ������ģʽ��
�����Ϊ201320798730.1�ı����������������˫�������ϵͳ�ṹ(ͼ5)����ͬ�ڳ�Ȧ��ֹ�Ľṹ���ù��Ͳ��������Ǽ���ֹ�Ľṹ��ʽ�������10�������ŵ����Ȧ���������20��������̫���ֲ��֣�����ʵ�������������������ת����������Ĺ���ģʽ��
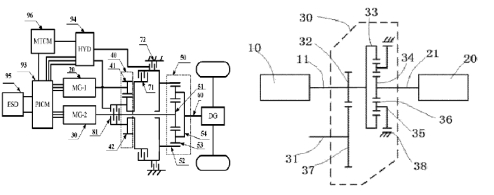
ͼ4����������ѧ˫������� ͼ5��������˫�������
1.3�о���Ŀ������
��ǰ�������������Ϊ���ƹ㴿�綯�����������Ƴ����־��ò����������Żݡ�Ȼ����������ʻ��̶̺ͼ۸�����أ����綯�����Ĵ��ģ�ƹ�ͱ��㷺���ܻ�Ҫ����һ��ʱ�ڡ����������һ��˫������綯���¹��ͣ�������ߴ��綯���ľ����Ժ���ʻ��̡�
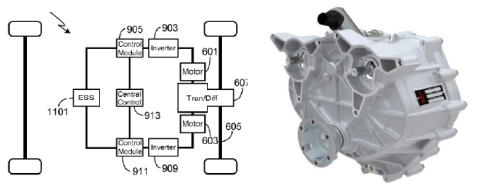
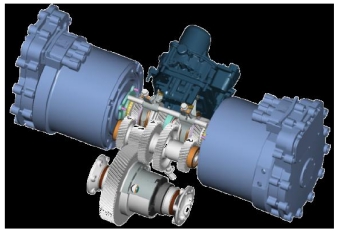
��Ϊ���IJ�������������ϵͳ�ļ���ˮƽֱ����Լ���綯�������������ܡ�����ж�������ϵͳ����ʹ�á����ݳ�������Ť�صĶ���Դ������ϵͳ��ģʽ�ɷ�Ϊ����ʽ�����ͷֲ�ʽ����������ʽ����ϵͳ������Ť��������������μ�������������������ڣ���Ҫ���������ֱ��������������ϵͳ���ڷֲ�ʽ�����У�ÿ�������ֶ���һ������������ϵͳ����챵������ϵͳ�Ƿֲ�ʽ��������Ҫ��ʽ��
����ʽ�����ļ�����ԱȽϳ��죬��������ͨ��������������ƽ�����䵽���Ұ��ᣬ���������ֵ�ת���ڴ���������в��ܶ����ص��ڡ���˲���װ�����Ĵ������Ϳ����������Ǻ��Ѷ��������˶��Ͷ������п��ơ��ֲ�ʽ������������ٷ�չ�����ڴ�������ֺ͵綯��֮��Ļ�е�������滻����˷ֲ�ʽ�� ��ϵͳ���нṹ���պʹ���Ч�ʸߵ��ŵ㡣
1.4�����
[1] ����.��������Ӷ�����صĴ��綯������������ϵͳ���Ʋ������Ż�[D].����:���ִ�ѧ,2014.
[2] ³����.���������������ķ�չ��״����ʵʩ;��[J].������������,2007(6):22-25.
[3] Muttana S B, Sardar A. Light weighting of Battery Electric Cars: An Impact Analysis Using Indian Driving Cycle[J]. SAE Technical Paper, 2013:01-2831.
[4] ������.�����������ܵļ��ּ���[J].�Ƽ���,2011:6-48.
[5] ������. ���綯�γ��ƶ���������ϵͳ�о�[D].�Ϸ�:�Ϸʹ�ҵ��ѧ��2012.
[6] ����������ѧ.һ��˫���ת����������ܳ�:�й�:102133856A[P]. 2011-07-27.
[7] ����ΰ,�ų���,���Ѷ�,�����.˫����������ϵͳ����̨���������Ʋ�������[J].�ص��,2014,42(8):38-43.
[8] ��С��,������.���綯�ͳ�˫����������ϵͳ���Ʋ����о�[J].����ͨѶ,2013,23(8):57-63.
[9] ����,���ڵ�.���綯�������Ͷ�������װ�õ�ƥ��������Ż�[J].��������,2011,33(9):805-808.
[10] ����ΰ. �綯����˫��������������ֻ�еʽ����Ӧ�����������[J]. �����㲿��, 2015, (12): 56-57.
[11]��ʤ��. ����˫�����ʱ���������Ĵ��綯�����������[J]. �人������ѧѧ��, 2016, (04): 651-656.
[12]����ѩ.˫�����϶���ϵͳ����ƥ����Э�������о�[D]. ���ִ�ѧ, 2011.
[13]���. �߿����ֶ���������챵���綯�����ȶ�������ܿ����о�[D]. ���ִ�ѧ, 2013.
[14]����������ѧ.�綯��������˫�����ϱ���װ�ú�װ�õĿ���ϵͳ:�й�:102555791A[P].2012-07-11.
[15] �������������ɷ�����˾.˫�������ϵͳ������:�й�:203611714U[P].2014-05-28.
[16] ������������Դ��������˾.˫���������������ϵͳ�����������Ʒ���:�й�:103738199A[P].2014-04-23.
[17] Nobuyoshi Mutoh. Front and Rear Wheel Independent Drive Type Electric Vehicle (FRID EV) for a Next Generation Eco-Vehicle[C]. Industrial Electronics (ISIE), 2010(7): 3642-3649.
[18] T.Holdstock,A.Sorniotti. A novel clutchless multiple�Cspeed transmission for electric axles[J]. International Journal of Powertrains,2013,2(3):103-131.
[19]Paul Walker. Performance Improvement of a Two Speed EV through Combined Gear Ratio and Shift Schedule Optimization[J]. SAE, 2013, doi:10.4271/2013-01-1477.
|
