|
ת�����ģʽ�µľ����ԡ�
���������ۺϹ������˫����������ͣ�ͨ���������ֵ���˫������͵Ľṹ�Ͷ���ѧ��ϵ�����������һ���ܹ�ͬʱʵ��ת����Ϻ�ת����ϵ�˫�������ϵͳ�¹��͡�
��2��˫������ʹ��綯��������ϵͳ����ƥ��
���ȶ�˫������ʹ��綯���Ķ���ϵͳ�������г���ƥ�䡣�����OPPeD��������Ϊ������̽����һ�ֻ�õ��Ч��MAP�ķ�������������Ϊ�����Ż��Ϳ��Ʋ����о��Ļ��������Ϊ�˸��õķ���˫����Ĺ��ʣ����IJ�ȡ������Ⱥ�Ż��㷨�Գ���ƥ��IJ��������˲����Ż�����������ͼ��ͼ15��ʾ��
 ͼ15 ����ƥ������ͼ ͼ15 ����ƥ������ͼ
��3��˫����������ϵͳ�����������������������о�
 ͼ16 �������Ʋ����������� ͼ16 �������Ʋ�����������
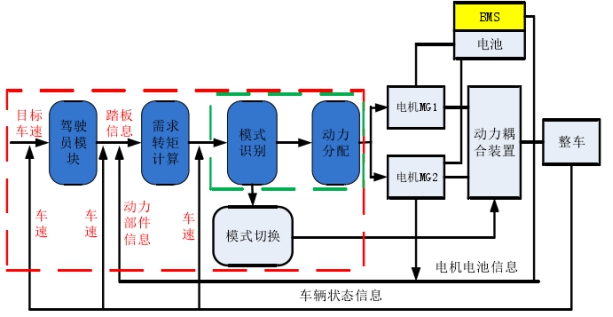
���������������ʹ���ϵͳ�IJ���ƥ�������Ҫ��ɵ���˫��������������������������Ե���ƣ��ص����˫����Դ�����µ��������������ƶ���Ŀ����ʹ˫����������ϵͳ��������ʱ�ϴ�ͳ���������ʱ�����㶯����ָ��Ļ�����ʵ�־����Եĸ��š�������Ҫ����������Ʋ��Եļܹ����з���������ɼܹ�����ͼ16��ʾ��
�������Ʋ��������ܹ���Ҫ�ɼ�ʻԱģ�顢����ת�ؼ���ģ�����������ģ����ɡ�
��ʻԱģ����ʵ�ʵ��������������Dz����ڵģ�����Ϊ����֤�������Ʋ��Ե���ȷ�ԣ��ڷ���ƽ̨�ܹ�����Ϊ�������˼�ʻԱģ�顣��ģ���ܹ�����Ŀ�공�ٺͳ�����ǰ�ij���ģ���ʱ�ļ���̤����ƶ�̤�忪�ȣ�ģ���ʻԱ��ʵ�ʼݳ�ʱ���ƶ��ͼ���̤��IJ���ϰ�ߡ�
����ת�ؼ���ģ���ܹ����ݵ�ǰ�ĵ��SOC״̬������̤�忪�ȼ���仯�ʡ������ص��¶Ⱥ�ʵ�ʳ��ټ����������ʱ������ת�ء�����ת����Ҫ���������֣�����ת�ز��ֺ�ת�ز������֡�
��������ģ���Ƕද��Դ����ϵͳ�ĺ��IJ��֣���ģ����Ҫ��������ģ�飺ģʽʶ��ģ��Ͷ�������ģ�顣ģʽʶ��ģ���ܹ����ݵ�ǰ������ת�غͳ����ƶ���ǰ������ģʽ����������ģ���ƶ������ģʽ�µ����ת��ת�ٷ�����ԡ�
��4��˫����������ϵͳ����ģ�͵Ĵ
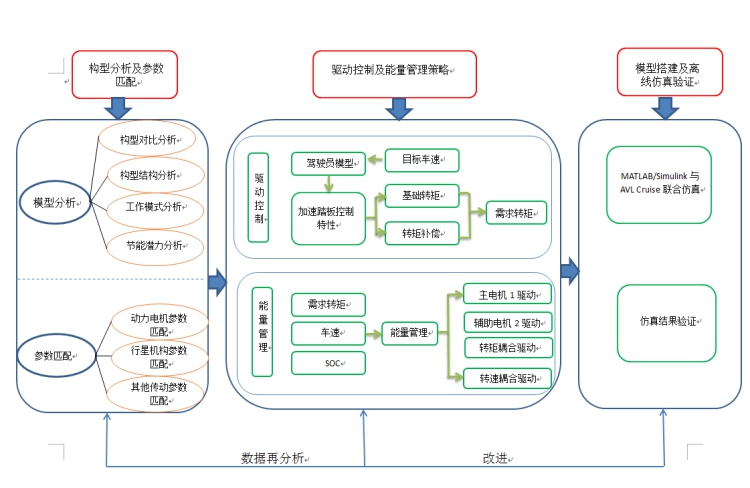
˫����������ϵͳ����ƽ̨���ڷ�������cruise�д�������������Ϳ��Ʋ��Զ����뵽cruise�У���������������֤��ϵͳ����ģ������Simulink�н��������������ģ�͡���������ģ�ͺͿ��Ʋ���ģ�͡�
����ģ����Ҫ���ݹ���ѭ���ij������������������Ť�غ�ת��������������տ��Ʋ��ԣ�����ϵͳ��������Ĺ��������ڵ��MG1�����MG2֮����к������䡣���MG1�����MG2���ݵ�ǰʵ������Լ����Ʋ���������������������ʵ�ʹ��ʣ��˹��ʾ�����������������ʵ��Ť�غ�ת������������������ȷ�������ij��١�ʱ�����̡�
��������ģ�Ͱ���3�����Ӧ������/����źţ�������������/���߿����õ�������ʡ���������ṩ�Ĺ���/��������ṩ�Ĺ��ʡ����MG1�����MG2���ṩ�Ĺ���/���MG1�����MG2���ṩ�Ĺ��ʡ�
���Ʋ���ģ������AVL Cruise�д�ͳ������϶����������Ʋ��ԵĻ�����ͨ���ķ�������/��ģ�͡�����������״̬ģ�ͺ;����ģ�ͣ�˫����������ϵͳ�Ŀ��Ʋ��ԡ�
2.3�����Ĺؼ�����
��1�������ͬʱʵ��ת�غ�ת���������������˫����ܳ��¹��͡��ۺϹ������˫����������ͣ�ͨ���������ֵ���˫������͵Ľṹ�Ͷ���ѧ��ϵ�������һ���ܹ�ͬʱʵ��ת����Ϻ�ת����ϵ�˫�������ϵͳ�¹��͡�
��2�����˫����������ϵͳ�������������������������ص����˫����Դ�����µ��������������ƶ���Ŀ����ʹ˫����������ϵͳ��������ʱ�ϴ�ͳ���������ʱ�����㶯����ָ��Ļ�����ʵ�־����Եĸ�����
��3����AVL Cruise�д�ͳ������϶����������Ʋ��ԵĻ���������µĿ��Ʋ��Բ���Simulink�������Ϸ��档
3�о������ͼ���·��(�������۷�����ʵ�鷽���Ͳ��裬�����ؼ��������취��
3.1���ȡ�ļ���·��
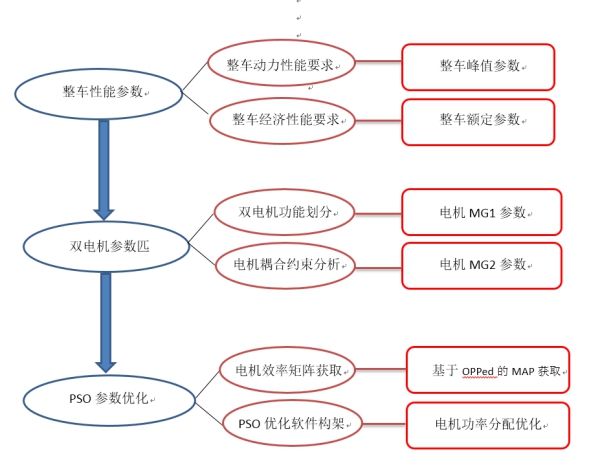
���ĵ���Ҫ�о�������Ҫ��Ϊ�����֣����ͷ���������ƥ�䡢�����������������������о���ģ�ʹ�����߷�����֤���֣�����õļ���·������ͼ3.1.1��ʾ��
 ͼ3.1.1����·�� ͼ3.1.1����·��
3.2����õ��о�����
��1���öԱȷ������������ʵ��ת�غ�ת�����������˫����ܳ��¹��͡�����ȡ������Ⱥ�Ż��㷨�Գ���ƥ��IJ��������˲����Ż�
��2��ͨ��̤�忪�ȼ�̤�忪�ȵı仯����ģ���ʻԱģ�ͣ����ݼ�ʻԱģ���Լ����г��٣�����������ת�ؼ��㣬������ת����ΪMATLAB����������ģ���һ�����롣
��3�����ڵ����������Сԭ�����ģʽ���֣��ֱ������������ģʽ�µĵ�������ʣ�ѡȡ��������С������ģʽΪ��������ģʽ��Ȼ�����Ч���������������е��������Ĺ���ģʽͨ��MATLAB�е������繤������Ƴ������ʶ��ʶ������ŵ�����ģʽ��Ȼ���ƶ�ģʽ�л����ޡ�����AVL Cruise�������Ϸ��档
4 ���������ɫ�봴��֮��
��1��˫���˫ģ��϶���ϵͳ��Ʒ���
��Ҫ���˫���˫ģ��϶���ϵͳ�Ĺ�����ơ����Ͷ���ϵͳ����ƥ�����ϻ��������ٱ��Ż�����������ݡ����ǵ����ڶ�����ϻ����Ļ�����ҵ��Ա���������ϵͳ��ʵ��˫�����ת����ϻ�ת���������ģʽǰ���£�Ӧ���нṹ��ģʽ�л������ص㣬��ͬ���Ʒ���߸�Ч�ԺͿɿ��ԣ����㳵���Ķ������뾭����Ҫ��
��2�����ڹ���Ԥ��������������Ʋ����ƶ�
���AVL Cruise�д�ͳ������϶����������Ʋ��ԣ�ͨ���ķ�������/��ģ�͡�����������״̬ģ�ͺ;����ģ�ͣ������˫����������ϵͳ�Ŀ��Ʋ��ԡ�����Simulink�������Ϸ��档
5 �����
[1] ����.��������Ӷ�����صĴ��綯������������ϵͳ���Ʋ������Ż�[D].����:���ִ�ѧ,2014.
[2] ³����.���������������ķ�չ��״����ʵʩ;��[J].������������,2007(6):22-25.
[3] Muttana S B, Sardar A. Light weighting of Battery Electric Cars: An Impact Analysis Using Indian Driving Cycle[J]. SAE Technical Paper, 2013:01-2831.
[4] ������.�����������ܵļ��ּ���[J].�Ƽ���,2011:6-48.
[5] ������. ���綯�γ��ƶ���������ϵͳ�о�[D].�Ϸ�:�Ϸʹ�ҵ��ѧ��2012.
[6] ����������ѧ.һ��˫���ת����������ܳ�:�й�:102133856A[P]. 2011-07-27.
[7] ����ΰ,�ų���,���Ѷ�,�����.˫����������ϵͳ����̨���������Ʋ�������[J].�ص��,2014,42(8):38-43.
[8] ��С��,������.���綯�ͳ�˫����������ϵͳ���Ʋ����о�[J].����ͨѶ,2013,23(8):57-63.
[9] ����,���ڵ�.���綯�������Ͷ�������װ�õ�ƥ��������Ż�[J].��������,2011,33(9):805-808.
[10] ����ΰ. �綯����˫��������������ֻ�еʽ����Ӧ�����������[J]. �����㲿��, 2015, (12): 56-57.
[11]��ʤ��. ����˫�����ʱ���������Ĵ��綯�����������[J]. �人������ѧѧ��, 2016, (04): 651-656.
[12]����ѩ.˫�����϶���ϵͳ����ƥ����Э�������о�[D]. ���ִ�ѧ, 2011.
[13]���. �߿����ֶ���������챵���綯�����ȶ�������ܿ����о�[D]. ���ִ�ѧ, 2013.
[14 ����������ѧ.�綯��������˫�����ϱ���װ�ú�װ�õĿ���ϵͳ:�й�:102555791A[P].2012-07-11.
[15] �������������ɷ�����˾.˫�������ϵͳ������:�й�:203611714U[P].2014-05-28.
[16] ������������Դ��������˾.˫���������������ϵͳ�����������Ʒ���:�й�:103738199A[P].2014-04-23.
[17] Nobuyoshi Mutoh. Front and Rear Wheel Independent Drive Type Electric Vehicle (FRID EV) for a Next Generation Eco-Vehicle[C]. Industrial Electronics (ISIE), 2010(7): 3642-3649.
[18] T.Holdstock,A.Sorniotti. A novel clutchless multiple�Cspeed transmission for electric axles[J]. International Journal of Powertrains,2013,2(3):103-131.
[19]Paul Walker. Performance Improvement of a Two Speed EV through Combined Gear Ratio and Shift Schedule Optimization[J]. SAE, 2013, doi:10.4271/2013-01-1477.
[20]Zhang S, Han G, et al. Optimal control strategy design based on dynamic programming for a dual-motor coupling-propulsion system[J]. Thescientificworldjournal, 2014, (1): 230-239.
[21]Tseng S K, Tseng C C, Liu T H, et al. Wide-range adjustable speed control method for dual-motor drive systems[J]. Electric Power Applications Iet, 2015, 9 (2):107-116.
[22]Alipour H, Sabahi M, Sharifian M B B. Lateral stabilization of a four wheel independent drive electric vehicle on slippery roads[J]. Mechatronics, 2015, (30): 275-285.
[23] Tesla Motors, Inc. Dual Motor Drive and Control System for An Electric
Vehicle:USA:US2010/0222953A1[P].Sep.2,2010.
, ��������ѧԺ˶ʿ�о������Ŀ��ⱨ��
|
������Ŀ
|
���綯����˫���˫ģ�������ϵͳ���Ʋ����о�
|
|
�� ��
|
|
ѧ ��
|
|
�� ��
|
|
|
�� ʦ
|
|
ѧ��רҵ
|
|
�����
|
|
|
ѧ Ժ
|
|
���ⱨ��ʱ�䡢�ص�
|
|
|
��ʦ���
���
|
��ʦǩ����
�� �� ��
|
|
�����
���
|
(ע����Կ��ⱨ��������������������ָ������ͽ���������ȷ�Ƿ�ͬ��ⱨ��ͨ����)
���С���Աǩ����
�� �� ��
|
|
ѧλ��
���
|
ѧλ�㸺����ǩ����
�� �� ��
|
1 ����ѡ������
1.1��������
����ȫ������������Խ��Խ�ߣ���ԴΣ�������ٽ�����֮����β����Ⱦ��ʹ���Ӽ�����������Ƶ��Խ��Խ�ߣ����ǵĻ���������ʶ�õ�������ߡ������������������������Լ�����ԺУ�Ӵ��˶Խ���������Դ������ע�������Լ��ʽ�֧�֡����綯�γ��������ŷŵ�����Խ��Խ�ܵ��������������ӣ�����������Ҳ���Ӵ�Դ��綯�γ��з���Ͷ�롣
���ڴ��綯�������ԣ���������Ĵ�С����Ӱ�������������ɱ�����Ӱ�촿�綯��������ʻ��̡���û�е�ظ���������£�Ϊ��ƽ������֮���ì�ܣ���ߴ��綯�γ������������ʳ�Ϊ�����һì�ܵļ���·����������������ʵ�;����Ҫ�����֣�
�������ڴ�ͳ����������ٱ������ṹ�����ϵĸĽ�����Ҫ��ʩ��ͨ���Ż���������ƥ��Ϳ��Ʋ���[1]���������������[2][3]��������̥����[5]���ƶ��������ռ���[6]��
����Ǵ��綯�γ��¹��͵��о�����Ҫ�Ĺ����е�������ٱ�������˫���˫��������˫�����ϵ�����������챵��������
��ǰ�������˫����������ϵͳ���о��ոմ����Σ���ҪΧ��һЩ�����о��ͳ����Ŀ��������о����о��ɹ���Ҫ��˫��������Ĺ���ר����һЩƥ����Ʒ�����о��ɹ���ͬʱ˫����������͵õ�һЩ��ҵ�����ӣ��ڲ�Ʒ�������Ҳ������һЩ������ʵ���Ʒ��Ŀǰ�������ϴ��綯��������ϵͳ�Ľṹ��ʽ��Ҫ�м���ʽ���������ϵͳ�ͱ���ʽ��������ϵͳ����챵�����ֱߵ���ṹ��2�֣���1Ϊ��Ҫ���綯���ͼ����ܳɽṹ��ʽ������ļ�������ʽ���綯���Ķ���ϵͳ�ṹ��ͼ��ͼ1��ʾ���������ͨ����������������ļ�����Ť���������������У�������������Ƶ����ͬ��ת�ٺ�Ť��������������ʻ�����������ڲ��õ�������������Ӧ���нϿ��ĵ��ٷ�Χ�����ٿ��Դ�Ť������Լ�������һ���Ĺ��ʴ�������Ч�ʺ߿ɿ��ԡ���Ȼ�������ĸ�ת�ٵ�������Ѷ�̫���ҵ�����ڸ��ֹ����¶��ܹ���Ч�ʹ�����������Ч�ʽϵͣ��������Լ�˳����ļ��������뾭�����ܡ�
��1 ��Ҫ���綯���ͼ����ܳɽṹ��ʽ


ͼ1 ��������ʽ���綯������ϵͳ��ͼ
����������������ϵͳ��Ҫ��Ϊ����˹��Ϊ������˫�����������ϵͳ��ͼ2��ʾ�����ֱ�/���ʽ��������ϵͳ��ͼ3��ʾ������Ȼ��˫�����������ϵͳ�൱��2����������ϵͳ����Ȼ�����������������ԣ����ɱ��ϸ��ҶԵ������Ҫ��ߣ�������ʽ�ֱ����ʽ��������ϵͳ���ڼ��������Ѷȴ���Э�������Ѷȸߺ͵����ƣ�������̵���Ҫ�������⡣
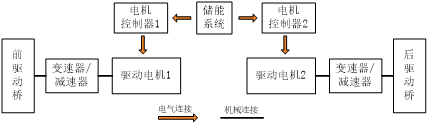
ͼ2 ��˹��˫���ǰ�����������ܳ�ϵͳ

ͼ3 �����ֱ���������ܳ�ϵͳ
1.2.1�����о���״
�����۷���������������ѧ����괺�ŶӶ�˫�����������չ����һϵ�е��о��������һϵ�е�˫�����������[6]������������ѧ�ĺ���ΰ���ų����ȶ�һ��˫������������ʵ��ƽ̨�����˴�����ҽ������������Ʋ�������[7]��������ѧ����С���������������һ�ֿ��Խ��е�һ������ת�����������˫����������ϵͳ����ϵͳ�Ķ�̬Э�����ƽ������о����������˿�������ϵͳ���[8]��������ҵ��ѧ�����塢���ڵµ����һ��˫������ʹ��綯�γ������˳����IJ���ƥ���о�������ƥ������ʾ˫������ʹ��綯�γ�����ڴ�ͳ���;���һ���ľ���������[9]������ΰ[10]�����������˫��������������������͵Ļ�еʽ����Ӧ��������ͨ�����Ի�ʵ�ְ���С�ܺĽ�ת��������������Ұ��ᡣ��ʤ��[11]����˻��ڷ�ʱ���ƵĴ��綯˫��������������Ʋ��ԣ�ͨ�����������֤�˷����Ŀ����ԣ��Լ�����ڵ��������ϵͳ�ڶ����Է��������������ѩ[12]���˫�����������ṹ�о���һ��Ч��ƥ���빦��ƥ�����ϵĶ���ϵͳ����ƥ�䣬�Թ���ƥ����Ϊ������Լ����������Ч��ƥ����Ϊѭ��������Ч���еľ�����ƥ��Ŀ�ꡣ���[13]�о������ֶ���������챵�������ȶ��Ժͽ��ܿ��ƣ���������·��ʶ�����������������ת���ƣ��Լ����������ƶ��Ľ��ܿ��Ʋ��ԡ�
�ڲ�Ʒ���棬���ںܶ��У�Լ�������������ϵ�е�ר����Ʒ�������õ�����������Ϊ�������װ�á�
ר�������Ϊ201210024534.9�ı�������ѧ�����һ�ִ��綯����˫�����������[14](ͼ4)���ù��������������ͬ��˫��üӳ�Ȧ��ֹ�Ľṹ��ʽ��ͨ����������Ϻ�������Ŀ���ʵ�ֲ�ͬ������ģʽ��
�����Ϊ201320798730��1�ı����������������˫�������ϵͳ�ṹ[15](ͼ5)����ͬ�ڳ�Ȧ��ֹ�Ľṹ���ù��Ͳ��������Ǽ���ֹ�Ľṹ��ʽ�������10�������ŵ����Ȧ���������20��������̫���ֲ��֣�����ʵ�������������������ת����������Ĺ���ģʽ��
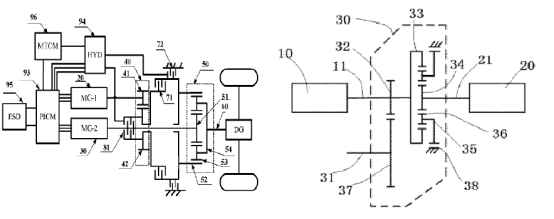 ͼ4 ����������ѧ˫������� ͼ5 ��������˫������� ͼ4 ����������ѧ˫������� ͼ5 ��������˫�������
���⣬�еĹ��Ͳ��õ��DZ������˫����Ľṹ��ʽ��������Ϊ��������Դ�����˫�����������[16]���ù�������˼���ʽ���ã��������ͬ��ã�����˵������������ʵ�������жϣ��ù��Ϳ���ʵ�������������������ת�����������
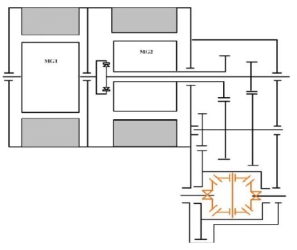
ͼ6 ��������Դ˫�������
1.2.2�����о���״
�����۷��棬�ձ���Nobuyoshi Mutoh��˫��������������͵Ĵ��綯������������ѧ���Ժͷ��������������о�[17]������ѧ��Kim�Ƚ���˫��������ϵ��������ʱ�Ľ���DZ����T.Holdstock��A.Sorniott��һ�ֵ綯������˫�������ϵͳ���������Ʋ��Ժͽ���DZ�������˷������ö�̬�����;�̬�����Ե������ģʽ�������Ż����[18]��Paul Waker[19]�о���һ�ֺ�����װ�õ�˫�����������ṹ����Դ������ṹ�ij��ִ����Ⱥͱ���װ�õ��л�ʱ������Ż��������Ӷ��ڶ����Ժ���Դ������������õ���ߡ�Zhang S[20]�о���˫�������������͵������������ԣ�Ӧ�ö�̬�滮�㷨������ſ��Ʋ������Դ��������͵������������иĽ���ͨ����������ó����㷨�ܹ���Ч��������ϵͳ��������ġ�Tseng S K[21]�о���һ�����Ͳ���ʽ��˫�������ϵͳ�Լ������������ԡ�����ʵ����������ڶת�ٷ�Χ��������ת�أ��ڶת���⣬ͨ�����������·�����������ϵͳ�����Ը�ת�ص������Alipour H[22]�����е�����������ֶ������綯�����IJ��������ƽ����о���ͨ��������۲������ģ���������������һ���µ��ٶȿ�������ƣ�����ͨ�Ļ���ģʽ������ʵ�ָ��ӿ��ټ�ȷ�Ŀ��ơ�
�ڲ�Ʒ���棬��������˹����˾������һ�ֵ綯����˫�����������ר��[23](ͼ7)���ù���������������������,��������ʵ��ͬ��ã�ʵ���˵���������ŵļ�����ơ�
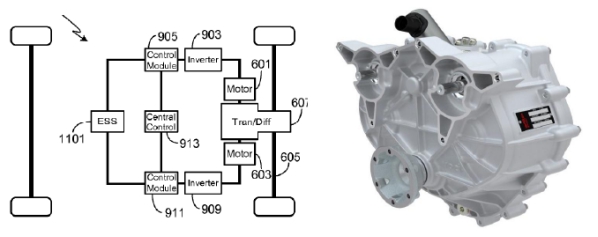
ͼ7��˹����˾˫�������ͼ ͼ8 Vocis˫�����������ͼ
ͼ9Vocis˫���װ��ʾ��ͼ
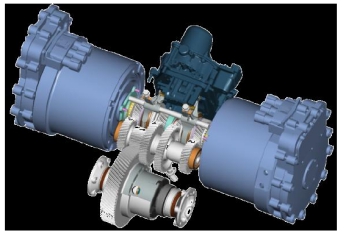
Ӣ����Vocis Ltd��������ڴ��綯��˫��������ı�������ͼ8��������������������Ϳ����˫����������ϵͳ����ͼ9��ʾ���ù�˾�����ѧ���������̺������������ֹ��͵Ŀ��Ʋ����о����������鹤����
2 ���ĵ��о�Ŀ�ꡢ�о����ݣ��Լ������Ĺؼ�����
2.1�����о�Ŀ��
��ǰ���綯�����Ĺ��ʹ��������㲻��һ�ǵ�����̶��ٱȹ��ʹ�������������С���������ǵ����Ч�����䲻���ڵIJ��㣬�ڵ�ǰ�ĵ�ؼ��������£��ܹ���ߴ��綯�γ��ľ�������ζ�ŵ綯������ʻ��̵����ӣ��⽫������������߶Դ��綯���Ľ��ܶȡ�����Ŀ�����£�
��1�������ͬʱʵ��ת�غ�ת���������������˫����ܳ��¹�������ߴ��綯�γ��ľ����Ժ�������̡�
��2�����˫������Ϳ���һ�������ڱ����͵Ŀ��Ʋ��ԣ�ʹ֮�ϴ�ͳ���������ʱ�����㶯����ָ��Ļ�����ʵ�־��������š�
2.2���������
��1�������ͬʱʵ��ת�غ�ת���������������˫����ܳ��¹��͡�
���ȶ�˫������͵Ľ��ܻ����ͽṹ��ƽ����˳���������˫�����������ڵ�����̶��ٱȹ�������ܾ�������Ҫ�����������档һ����˫������Ϳ������õĵ����Ч������ȴ�ͳ���ʹ���һ����˫���������ʱ�ĵ�������ʣ��������Ч�ʣ��ȴ�ͳ���ߡ��������˫������װ�õ����ͺͽṹ��ƽ����˺����������������ij��У�����һ�ִ��������ŵ�˫����������ϵͳ����ϵͳ��Ϊ��ͼ10��ʾ��
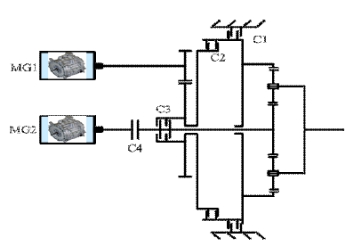
ͼ10 ����������˫����������ϵͳ
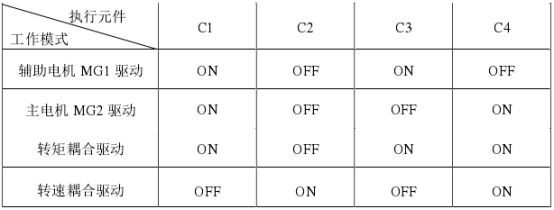
��2 ��ͬģʽ��ִ�л���״̬
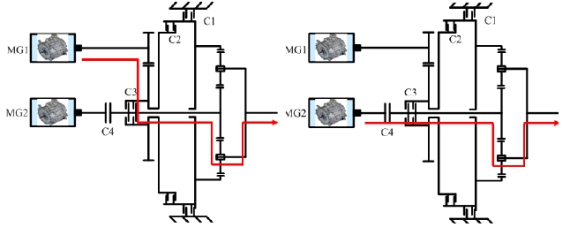 �����������Ϊ�����������������������������������������������·����ͼ2.2.2��ʾ�������������������������·����ͼ2.2.3��ʾ�� �����������Ϊ�����������������������������������������������·����ͼ2.2.2��ʾ�������������������������·����ͼ2.2.3��ʾ��
ͼ11 �������������������·�� ͼ12 �����������������·��
�����ģʽ�£���˫���ת�����ģʽ��������������·����ͼ13��ʾ��������ģʽΪ˫���ת���������ʱ������������ͼ14��ʾ��
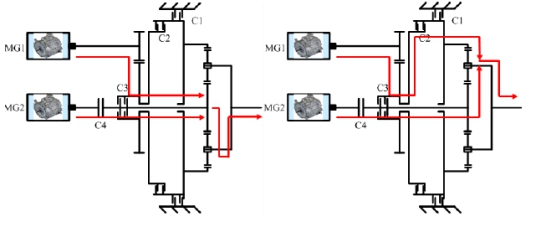
ͼ13 ת�����������������·�� ͼ14 ת�����������������·��
�����Ϸ������Կ��������ֽṹ�����ֹ���ģʽ���ܹ��ܺõ������ڳ������е�����С�����ʡ����ٴ��ʺ������й���������������������С�����²��õ������������߸��������ﵽ���ܵ�Ч���������ڴ�Ť�غ��ٹ����£�ͨ��ת����Ϻ�ת����������ڵ���Ĺ����㣬�ڹ��������ڽ���Ѱ���Դﵽ����Ч����
���ǸýṹҲ����һЩ���⣬��Ϊ�������û��ͬ��ã����ڵ���ߴ��Լ����������������������ľ���ϴ�����ɶ������װ������ϴ�ͬʱ����ת�����ģʽ�£���Ϊ�����ŵĴ����Ȳ���ѡȡ̫���������˸������MG1��Ť���������MG2Ť�غܽӽ����������������������Ķ������䲻����������Ӱ��
ȫ�ױ�ҵ��������ֳɳ�Ʒ��������ѯ�źţ�biyezuopinvvp QQ��1015083682
������ҳ
��ת����ע����Դ��www.biyezuopin.vip
|
