ms-text-justify: inter-ideograph;">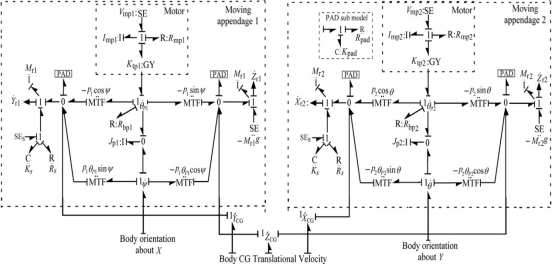
ͼ3.�ƶ�����װ�ü���ͼģ��
С���֣�����С����͵����ļ��衣(5)��������̬�����������ѹ����Ŀ�������
|
|
�B
|
�B
|
(��d − �� )dt
|
|
|
Kp1 (��d − �� ) + Kv1 (��d − �� ) + Ki1
|
|
V1 =
|
|
|
(6)
|
|
p1 cos �� Mr1g
|
|
����KP1��KV1��Ki1�ֱ��ǿ������ı������桢��������ͻ������档
Ϊ�˿���Y������巽������ʹ������һ���ƶ����������Ļ�����x�����˶�����y����û���˶����Ի������Ƶ�ѹINP�Ŀ����ɶ���С���ֵ����λ�ã�X�����Z�����ϵ��ٶȷ��̿������������۵�����������
��������˱���Ϊ�������ɶȸ���.������ת������ѧ������ŷ�����̸�����������-�̶���(xyz-��)��ԭ����롣���
|
Nx = Ixx���Bx + (Izz − Iyy )��y��z
|
|
|
Ny = Iyy���By + (Ixx − Izz )��z��x
|
|
|
Nz = Izz���Bz + (Iyy − Ixx )��x��y
|
(7)
|
���У�nx��ny��nz���������������ϵľأ�ixx��iyy��izz��ʾ��Ҫ�Ĺ��Ծأ���x����y����z��ʾ���ٶȣ��±��ʾ���ٶȡ��ø�ͷ�����ܵ��˶�ֻ�ı���������(x��y)�����巽����Ҫ���Ƶ��������ת��
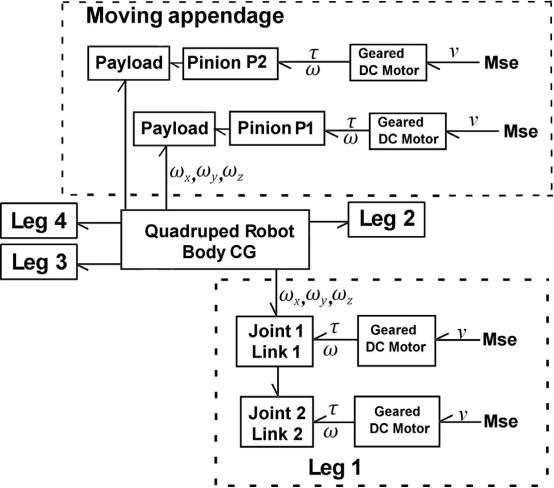
�ƶ�����װ�õļ���ͼģ����ͼ3��ʾģ�͵����������ֱ�ʾ�����߾����ڣ�������������̶�X��Y dir�е��˶���
ģ����߲��ֵĹ�����������ϸ˵�����³�������̶�X�˶���С����1����ת������С����1�����TH����ת�Ƕ�E��̶�X��Ϊ��p1����ȡ��ΪС���ֵ��ܽ��ٶ�Ϊ�ȡ�p1�ס�����ת������i��jp1Ϊ0�Ľ��紦ģ�⡣
����һ��ͬʱ��0-�ӵ㻹ģ���˳����ϵķ�Ӧ����.��ֱ���綯������һ��1-����(ָʾ��ͬ�ĵ���)�ĵ�Դ��ѹ(SE��vmp1)�Ͻ�ģ�ġ���������(I��Imp1)������(R��Rmp1)�ͻ������(GY��Ktp 1)�����������������������������ȵ�ת����Ϊһ����Ӧ�綯�ƣ�EMF�������ȵ�С�����ٶȣ�������������Ϊ������Գ��������ּ��ٵ���Ĵ�����Ϊ�����ڵ�����Գ����Ķ����С�
|
included in the definition of the motor characteristic constant.
|
|
|
|
|
�B
|
�B
|
�B
|
cos �� + p1
|
�B
|
|
The relation for Y-velocity of the rack, i.e., Yr1
|
= YCG − p1
|
��p1
|
��p1 �� sin �� given in Eq. (3) is modeled by adding
|
|
three flow variables at a 0-junction where there is a direct bond from 1 �B
|
|
junction indicating the robot body CG velocity in
|
|
|
|
|
Y
|
|
|
|
|
|
|
CG
|
|
�ֱ��ǡ���ע�⣬û����ʽ��ʾ�����ź��Ա���ͼ�ε������ȡ��������������Ľ����һ��1-�ڵ��Ͻ�ģ�����ӻ���I��MR1���Ե����ӡ�Ϊ�������ƶ��������뿪�������˶���һ��ֹͣ����ģΪһ���л��ĸ��Ե���������ϵͳ������ks�ع���esents���ɳ�����Rs��ʾֹͣ������Coeffi������ֹͣ��������ֻ���ڸ�������ֹ֮ͣ��ĽӴ��г��֣���ˣ�SE��һ���л���Ŭ����RCE�����ڵ������ڻ��ܸ��ǵij��Ȳ����谭�������IJ���ȷ��Ŭ����ͬ���أ��÷��̸������˶�ѧ��ϵʽ��(4)ͨ����0-�ڵ㴦������������������ģ�⡣��1Z��cg����ֱ�Ӽ������ӣ�ָʾ������������Z�����ϵ��ٶȣ��Լ�ͨ�����Ʊ�ѹ��mtf��−p1 sin������������
MTF��−p1��pcos���ֱ�����1����1�������������Ľ������1 ��p1 ��
��һ��1�ڵ㽨ģ�����л���I��MR1�Ĺ��Ժ�����SE��−Mr1g�����ӵġ�ģ�͵Ĵ�����������Լ�����źż���ʾ����b�������ǵ�ĩβ��һ��������ͷ���롣
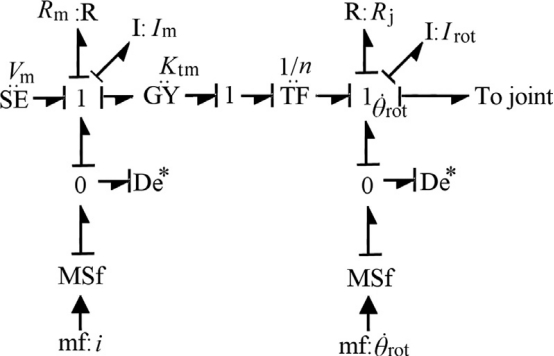
ͼ4.�Ȳ��ؽ���������DBG
�ĵ�Ԫ��&bra;14��17&ket;�Ǹ��Ե���-����ϵͳ�������˶�֮�佨����ʽԼ������������ʹ����������ģ���еIJ��������ϵ��
Pֵ��AD�նȺ������������ֵ�ն�Ϊ���۲�������������˶�ѧ��ϣ���ģ��ʱ�䡣
ͬ����ͼ���ұߡ�3�����ڶ�������С���ֲ���ģ�͡�ͼ��ģ�͵ײ���������Ŷ˿ڡ�3��ʾ���������ٶȺ�������ת�ٶȡ������˱�������Ժ���Щ�����˿ڽ�������˵�ģ�ͽ��нӿڡ��ƶ������������������Ϣ��ʩ�ӵ����������ϡ�ͨ����Щ�ۿڡ�
3.�ݴ�����
�����ݴ����Ʒ�������ϵͳ�Ĺ���������ò�ͬ�Ŀ����ɡ��ݴ����Ƶı�����������pla����������Ӳ��ʵ�ֵġ�ͨ���������ÿ�����ϵ�ṹ��ʵ�ֹ��ϲ����ļ��㡣�ڱ����У����������౻�������ƶ�ʧ�IJ�����������(��̬ģʽ)Ҳ���ı�����ND����Ӳ��(�˶�����)��ִ�������Ͻ����ݴ����ơ���ˣ�������ķ���������ʽ�ͱ���ʽ�ݴ����ƵĻ���塣����
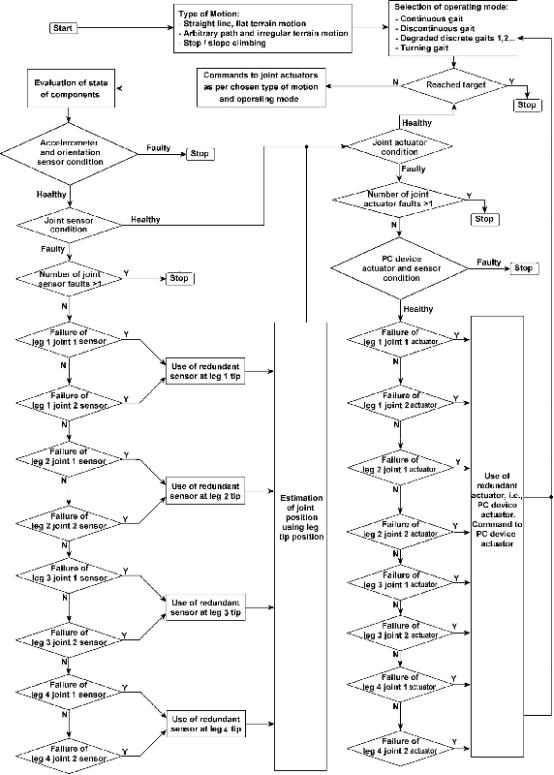
Ϊ��ʵ���ݴ����ƣ������˽�ϵͳ�и������Ľ���״̬������Ҫ��ϵͳ���г������ӣ��Ա��ڼ�ʱ�����κ��쳣��������ʶ����Ϸ�������ִ����Ӧ���ݴ����衣
3.1.���ϼ�������
��ȫ�ٽ�ϵͳ������û���κξ����֢״�������ʧЧ������������£����벻�ϼ��ͼල��ϵͳ���ලϵͳʹ��һ����������������ȱ�ݵ�����£�ҲҪ���ֽ�������һ������Ҫ��������������ϵͳ�Ĺ��ϼ��(�������쳣״̬)�����ϸ�����ʶ����ϡ������ȷ���ĸ���ԭ����������ľ��ߣ�����Ӧ���ϣ�������ܵĻ������ϼ��������ͨ������R�Խṹ���ķ�ʽ���С�������ϵ(ARRS)��ARR��һ����֪���̱���[11��12]֮���һ�������������Լ������ʵ����������ARR(Լ����Ч��t)EST)����Ϊ�в�����ϣ��ڽ������й����У��в�ӦΪ�㡣
Ϊ�˵�����������˵�ARRS������Ͻ��ͼ(DBG)��
��DBG��,������ͼģ���еĴ�����ת��Ϊ��ģ���У�������һ��ʣ������˿ڣ�����ģ�ͷ���Ϊ��ѡ��������ϵ��ͼ��DBG����֪�IJ���ֵ��4�������i��С������ת��n�ȡ�ROT����ͨ������������Դʩ����DBGģ���ϣ���Ϊ��֪��Ϣ��������ؽ�ִ����(������������ktm�ij���ֱ���綯��)��һ��gea��r��ԭ��Ϊ1��n��ע�⣬�ڼ���ͼ��ʾ�У���ת��gy�ͱ�ѹ��tf�����һ��ʹ��ת������ת��ģ��ktp(�н�һ�����±�1��2����ʾmo)��Tor��)����KtMn��Ŭ��Դ(SE��VM)������(R��RM)�͵��(I��IM)���ӵ�һ����ʾ��������1�ᣬ������I���ۼ�������һ��1-�ڵ��ϣ��ֱ�ģ����ת�ӵļ�ת������(i��irot)���ؽ�Ħ��(R��rj)�ͻ�еϵͳ���ಿ�ֵĹ������(���ı���to john����ʾ)�����ڱ�ʾ�ؽڽ��ٶȵ�ͨ�������ȡ�ROT��
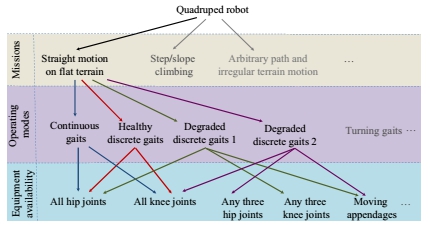
ͼ5.����ģʽ���豸������ͼ����չΪֱ���˶�������豸(����ֻ��ִ����)�����ԡ�
���Ӹ�����ģ���е�����ARRS��ע�⣬ARRS���������ǵ��ڴ���������������DBG����ARR����ϸ�������[6��22]�в��ġ�һ���ȹؽ�������ARRS������д�ɣ�
|
ARR1 : (Vm ) j − Im
|
d(i)
|
j
|
− Rm (i) j − nKtm (���Brot ) j
|
= 0
|
(8)
|
|
|
|
dt
|
|
|
|
�B
|
|
��
|
= 0
|
(9)
|
|
ARR2 : nKtm (i) j − Rj (��rot ) j − Irot (��rot ) j − (���� ) j
|
����VM�ǵ�Դ��ѹ��IM�ǵ����У�I�ǵ��������RM�ǵ�����裬ktm�ǵ���������ȡ�ROT�ǽ��ٶȣ�RJ�ǹؽ�Ħ����n���ִ����ȣ�ת�ӹ������Ӧ��Ǿ����������ء���EQ���±�j.��(8)��(9)��ʾ���ϱ�š����㶯���а˸��ȹؽڣ������ܹ�16��AR��RS���γɡ�ͬ����������̬������ִ�л�����ARRS���Ա�дΪ��
|
|
d(i)
|
|
|
|
|
|
|
ARR17 : Vmp1 − Imp1
|
p1
|
|
− Rmp1 (i)p1 − Ktp1���Bp1 = 0
|
|
|
|
(10)
|
|
dt
|
|
|
|
|
|
�B
|
− (Mr1y��r1 )( p1 cos �� ) − (−Mr1g)( p1 sin �� ) − Jp1
|
��
|
��
|
|
(11)
|
|
ARR18 : Ktp1 (i)p1 − Rbp1��p1
|
(��p1 + �� ) = 0
|
|
|
d(i)
|
|
|
|
|
|
|
ARR19 : Vmp2 − Imp2
|
p2
|
− Rmp2 (i)p2 − Ktp2���Bp2 = 0
|
|
|
|
(12)
|
|
dt
|
|
|
|
|
|
�B
|
|
��
|
��
|
= 0
|
(13)
|
|
ARR20 : Ktp2 (i)p2 − Rbp2��p2
|
− (Mr2x��r2 )( p2 cos �� ) − (−Mr2g)( p2 sin �� ) − Jp2 (��p2
|
+ �� )
|
(10)-(13)��Ӧ����̬����ִ����1��2������Vmp1��Vmp2�ǵ�Դ��ѹ��ip 1��ip2��
��������ǵ������������1������2�ǵ����У�Rmp1��Rmp2�ǵ�����裬Ktp 1��Ktp 2�ǵ����������p1����p2��С���ֵĽ��ٶȡ�Rbp 1��Rbp 2������Ħ����n�dz��ֱȣ�jp 1��jp 2��С���ֹ��ԡ�
ARRS�Ľṹ�������ڲ���������������(FSM)���ù�������������һ�������ƾ�����ʾ���˸�������IJ�����ÿ���в�Ĺ��ס�
�ɼ�صĻ�ɼ��Ĺ��ϱ���Ӱ������һ�����ࡣ�ɸ���Ĺ���Ӱ��Ψһ�IJв(��Ϊ��������)������ͬ����otӰ��IJв������ȱ�㡣����������£����еĵ�������ж��صķ�������������ϼ�غ��붼���ԡ�
�ڹ��ϼ�����֮��������豸�Ŀ�������ȷ���ʺ��������������Ĺ���ģʽ(OM)��һ����˵�������������Ҫִ��������������������ͼ��ʾ��5.��Ϊ��ִ����Щ������������ѭһ���ʵ���OM�����Ը������е��豸����������ͼ��ʾ��5.ֱ���˶�����ʹ�����ֿ��ܵIJ���ģʽ��ִ�У�����������Ϊ�˻����˵Ľ���״̬����������Ա���Ϊ�������Ĺؽڹ��ϣ�Ҳ��Ϊ�˻�ģʽ��ES������ϵͳ�Ľ���״̬��ȣ����˶����ܽϲ������ģʽ�������������͵����������������IJ���ģʽ��������ͼ��δ��ʾ����ѡ��OMS��Ҫ�豸Ҳ�Ǵ������������Ƕ�û����ʾ�豸�Ŀ������±���������ͼ��
ͼ����ʾ����֯��5ֻ�ӽ���ִ�����Ŀ����ԽǶ������ͣ��������Ŀ�����Ҳ���Լ���˵������������˱���Ϊ������С�ȹؽڶ����ڽ���״̬��
ִ�������Źؽں�ϥ�ؽڣ��ʹ������ڽ���״̬���ǿ��õģ�������Ҫ�ƶ���������״̬����������������ɢ֮������ӡ���̬OMS�Ϳ����豸��ͼ��ʾ��5)��������һ���Źؽڻ�ϥ�ؽ�ִ���������ؽ�ʧЧ�����µ��˻�ģʽ�£������˵���������Ҫ���ƶ��ĸ������滻�����ڽ���״̬���������˻�ģʽ�µIJ����˶��Dz����ܵģ����������ֹ�����������ϵ�洢�ڳ�Ϊ����ģʽ���������ݿ��С�ͼ��������ģʽ������˳�����У����ѡ�����Զ���ѡ��[22]��
����豸�������ϣ���ͨ����һ��OM�л�����һ��OM�������������ã���<, font face="Times New Roman">OM��ʹ�ù����豸�������ڽ������豸��ִ���������������������ķ�ʽ��
�ٶ����������������IJ�̬���ߣ��ò�̬��Ҫ����״̬�������Ȳ��ؽ��¶�����������Ҫʹ�����ƿ�����(�ƶ�)��ͻȻ����һ���ȵ�ϥ��ִ����ʧ�顣����������£������˽��л����˻���ɢ/��������2 OM����������̬��������ִ�л�������Ӧ���ϡ�
ͼ6��ʾ���л���ͬ����ģʽ����������ͼ��ÿ����������ִ�����Ľ���״̬�����������ڼ䱻��ء�ȡ�����˶������ͺ��豸������(���ڽ���״̬)��ѡ��һ������ģʽ������Ӧ����ִ�������ִ������������(һϵ���벽̬cy���Ӧ������)��)��Ȼ���Բ�������ʽ��ÿ������ʱ�䲽��֮�����Ӧ���ڼ���˶���һ���ԣ����в�Ĵ�С������ʣ��ƫ�����ӣ�ִ�����ʹ������Ľ���״��������[22]��������巽��ؽڽǶȴ������ǽ����ģ��ؽ�ִ����Ҳ�ǽ����ģ���ô��̬���ھ���Conti��ֱ�������˵���Ŀ��Ϊֹ��������κ�ʱ��㣬�����巽�����Ĺ��ϣ���ô����ͻ���ֹ(ֹͣ)�����⣬����ȱ�ݵ�����������ֹһ���������й��ϣ���ô�����ʧ���ˡ�������ؽ�ִ�������ֹ���ʱ��Ҳ�ᷢ��ͬ�����������ˣ��������һ�����ϴ��������ϣ���ͬ����ϸ÷������ڹ�����������������(�������ں�)�жԹ��ϴ������Ķ�ȡ���Ӷ�ʹ�����ܹ��������ƵIJ���һ��ִ�С������ֻ��һ���ǵ������ִ�л�������ʱ���ƶ������Ľ���״���������Ƿ�Ҫ��ֹ������ͨ���������ƶ������Լ�ʣ���3Сʱ�������˶������ȵ�˫�ȡ����磬�����������κ��ȵ�1��2�ڵ㷢������ʱ���ڸ��ȼʹ�����ഫ�����Լ������������ô�����������(�������ں�)��������һ�������۵�ȱʧ������λ�����ݡ�
3.2.���������ϵ���
���������ϵ�����Ҫ����Ĵ�����Ӳ���������о���ϵͳ�У��������ݵ�MEMS���ٶȼƲ�������ķ�λ��λ�ơ��ڱ���Ʒ�У�InvenSenseMPU-6000TMϵ�д�����[23]�ijɱ�����100��Ԫ������һ�����������Ǻ�һ��������ٶȼ������ͬһ����ģ�ϣ���ʹ�����Ḵ�ϴ��������������ں��㷨�е�SS���ݡ��ڱ��о��У�����MPU-6000TM���������������Ǻ�����ֱ�Ӳ�������ķ�λ�����⣬һ��ǰ�����Ը��ϵͳTEM���Ը������崫������ͨ������ͨ��(���磬ͨ���������õ��豸)�������ݡ��ȼ���˶��ǴӰ�װ�ڵײ���������ϸ��ٵġ������һ�ࡣ��������������ʵ�����ⲿ���ڲ������������ںϡ���ע�⣬��Щ�������Ѿ���Ϊÿ���������豸����ɲ��֡�������ҵ�����е���ά�˶���ϵͳҲ��������������λ�ú��ȼ���ٶȡ����磬pti�Ӿ������˶�������[24]�Ǹ߶Ⱦ�ȷ����У���ٵġ�ϵͳ�������ϵͳ�У����ȼ��ϸ����в�ͬ��״�ʹ�С�ı�ǡ�ÿ����Ƕ���Ψһ��ID��������̼���ϲ��Ͻṹ�ϵĸ����������ȼ��ϵı�ǵ���άλ�á�Ȼ�ɼ������˶����������������ϵ����������С�
��Ϊ���������ϵ��ڵ�һ�����ӣ��������¶����ı������еĹ��ϡ�
�������ڵ����Ԫ������λ�ô�������
������Ϊ��ϵͳEV��³��������Ȼ�ⲿ����ʧ�ܵĿ��ܡ����ִ�����ʧЧ�ĵ���ԭ���ǹ��ȡ��Ӵ��ɡ��������е�ˮ�֡���װ�������µ������ĥ�������������ô������������ֲ������������1λ�ô������Ĺؽ�2��ȫʧЧ����������Ӧ��y��z������ȼ�λ�ã���ͷ1�ĵ�ǰλ�ã������帩����ǿ�����ȷ����ͷ2��λ�á���һ������Y��Z�����ϵ��ȼ�λ�ÿɸ���������ʾ��
|
Y = YCG + R1y cos �� + l1 cos(�� + ��1 ) + l2 cos(�� + ��1 + ��2 )
|
(14)
|
|
Z = ZCG + R1y sin �� + l1 sin(�� + ��1 ) + l2 sin(�� + ��1 + ��2 )
|
(15)
|
����l1��l2�ֱ�������1��2�ij��ȣ���1�ͦ�2�ֱ��ǹؽ�1��2�Ĺؽ���ת�����Ǹ����ǣ�r1y�Ǵ����������ĵ��ľ��롣��һ���ȵĹؽ�1�����̡�(14)��(15)�����ڲ��Ҧ�2��������ʾ��
|
��2 = cos−1 ((Y − YCG ) cos(�� + ��1 ) − R1y cos �� cos(�� + ��1 ) − l1cos2 (�� + ��1 ) + (Z − ZCG ) sin(�� + ��1 )
|
|
|
−R1y sin �� sin(�� + ��1 ) − l1sin2 (�� + ��1 ))/l2
|
(16)
|
ͼ6.�����OMS��ѡ�������һ�����ϴ�������һ���ؽ�ִ��������
ͼ7�����˶���ģ�͵����㶯��Ĵʼ�ͼ����һ����չ��ʽ����
��ˣ���ʹ���������ϣ�Ҳ���Թ��Ƴ����Ƶ�����λ�á��������������ȵ������ؽڴ��������ϣ�Ҳ�õ������Ƶı���ʽ�������Ȳ��ؽڸ�Ӧ���ն������崫������������̬ģʽ��������ʹ�ù��ƵĹؽ�λ�ô���ʵ�ʲ�����
��һ����if-the����ʽʵ�ֵĿ����ɿ����֧��ϵͳ����ϵͳ���ģ���й�����Ϲ��ߵ���Ͻ����ִ����Ӧ�Ŀ����ɡ�
3.3ִ�������ϵ���
�ڶ��������۵��ƶ�����װ����������ִ��������(�������ӹ���)������������£��豸ֻ���ڷ���ִ��������ʱ�ű�����������һ���ȵĹؽڱ���������ô���ȵ����������ؽڵİ����£�����Ȼ���������ķ�ʽ�ƶ����ڿ첽��̬�ĵ�һ�Σ��Խ����෴�����ƶ��¡���ڵڶ��Σ���ͬ���ȼ�Ӵ���������崫���������ڽӷ�ʧЧ������£�û�б�֤�ڵ��������ʵ����ȼ�Ӵ���ή�����˶��ܵ�����Ӱ�졣��������Ŀ��Ʋ����У����������������λ�ã�ʹcg������ʧ���ȵ��Źؽ��ƶ���ʵ���ϣ��м��˻�����cһȳһ�յ���ǰ�ߡ�
ע�⣬������ǰ�˶������崫�������У�ʵ�ʵĸ�����λ��ȡ���ڹؽڱ�������״̬�������Ǽ��μ���ġ����������۵Ŀ���ֻ���ڼ�ijһ�ض��ȵĹؽڹ��Ϻ�L�����ű������һ�����п��Ʒ��ԡ����-Ȼ��-�������ʽ��ִ�У��Խ�����еĸ������Ϲ��ϡ�����֧��ϵͳ����ϵͳ���ģ���еĹ�����Ϲ��ߵĽ����ִ����Ӧ�Ŀ����ɡ�����ƪ�����У����Ѿ������ǵ��ˡ���ɫ��ʾ���㶯��Ľ���״������ǽ����ģ���֪��һ�������ؽڹ��Ϸ�������֪��ʵ���У������ɱ���������ΪԤ��ѡ����㷨��
4.��������˵Ķ���ѧģ��
��������˵�ʾ��ͼ��ͼ��ʾ����������˵�ÿ���ȶ����������ɶȣ�ÿ������������ת�ؽڡ����������屻��Ϊ�Ǹ��塣ͼ7��ʾ��������ͬ��ģ��֮��Ļ����Ļ����˵ļ�ͼ���ƶ�����װ�õ���ģ�Ͱ���S���Ͳ�ε���ģ�ͣ���������չ����ʽ��ʾ��ͬ���������˵�һ����(��1)����ģ���еĽϵͲ���ģ������չ����ʽ��ʾ�������Ľ�����ģ����ϳɼ����ϸ߲�ε���ģ�ͣ��ٽ��ϸ߲�ε���ģ�ͽ�һ���ֽ�Ϊ�ϵͲ�ε���ģ�͵ȣ���Ϊ��ζ�����̩�½�ģ���ƽ�ƺͽǵ������ɶȻ����˻�������ѧ��ŷ����ṹ[ 13 ]�C17,25,26��ģ�����ٶȺ�ƽ���ٶȴ����봫���������ӽ�����������ͼģ�͡�����Ǽ���ͼ��ģ����Ч�Ա�����Եĵط���������ͼģ�������˶�ѧ��������ġ����ڼ���ͼ��(Լ��)�ṹ���еĹ����غ����ʣ���������������ƽ�ⷽ�̾����Զ����㡣��������(ͨ���ڸ��ֿ��õ���ҵ������ʵ�ֵ��㷨����)�Զ�ȷ��ģ�Ϳ��������е��˶�ѧ����̬������һ���ԡ����˱���������ģ�ͽṹ�Ľ�������֮�⡣
����������ģ���У�ÿ���ȵ��½ڱ���Ϊ����˳�ġ���ˣ�����������һ������״�����ӡ��������˵���ϸ��ģ��[17��25��27]�����ۡ����ڷ�������[14��28��29]�н����˺����������˵������嶯��ѧģ�ͺ��˶�������װ�õ�NDͼģ�͡�
ͼ���ϲ���7�����˴��ƶ�����װ�õ���������˵Ĵʼ�ͼ��ע�⣬��Ӧ�ı�����ͼ��ʽ(���뽻֯���dz����ӣ������Dz��ʺ����������ʾ)�����뵽������ģ�黯��ʽ(ʹ����ģ�ͺͲ�ηֽ�)��ģ�Ϳ����ͷ��档���߿ɲο����ߡ�ǰ30�C[ 32 ]����������˽�ģ��ϸ�ںͼƻ����ȵ��˶�ģʽ�µĸ��ֲ�̬��
5.��ʵ��װ��
Ϊ�˽���ʵ����֤���������ƶ�����װ�á������������װ�ð�װ������������ϣ���ͼ8��ʾ��12 Vֱ�����ٵ������ˢֱ�����100:1POLOU����Ľ���������)���ڲ������֡���ϼ��������Ƴɵġ�С���ֵ���ת�˶���ƽ̨�ڲ������������˶����ṩ��ָ�ϡ���ֱ̨�������ͨ��20A˫ֱ�������������ArdiunoMegaADK���������ơ�����-С����װ�õ�����ԴΪ12V-10����.����������ٶȼƲ�������ķ�λ.����Ardiuno��д�ij����ȡ���������ݣ�����Ӧ��������������������źš�
���ƵĻ����˳�0.5�ף���0.42�ף�������Ƹ߶�0.48�ס������ȡ����塢ִ�л����Ϳ������⣬��������ԼΪ15�����������Ϊ��������Ƶġ�����15������Ч�غɣ��������������ء������Ч�غɵ�һ���ֽ�����װ���ƶ��ĸ����ϣ����������˵����ľͿ��Ա������ƶ���ת��BOD���κ��ȵ������������Ǹ�������غ���������С�ġ������ǵ�ʵ������������Ѿ�û�м�̨����ѷ����ֱ������������ṩ����Ƶ����Ӹ���Ĺ��ܡ�tŤ�ء���Щ������Ȼ�ߴ����Ϊ�˽�ʡ�ɱ������ڻ������ȵ��Źؽں�ϥ�ؽ���ʹ�á���ʵ�������У���Ч�غ�Ŀǰû�а�װ����˴��ⲿ���Կ����������Ϳ�������
ͨ���Ż��Ȳ���״������ϵͳ�����Խ��ͻ����˵�����.����������ĸ��������綯ϥ�ؽڣ������ȴ���[1]�����½�����ģ�⼡��Ķ��������������������أ��γɽ��յ���ơ����⣬����û����Ч�غɣ��ƶ���������Ҫ�����˶�����ͨ����ʧ���ȵ����ء���������Ч�غɽ�֧�����ƶ�������ʱ�������˳���CG����ͨ���ƶ�������С�˶������ƶ�����ˣ�BODY���ȿɼ�С��0.2�����ҡ�Ȼ�������峤�Ȳ��ܽ�һ�����٣���Ϊ�⽫�����ȵIJ������˶��ٶȡ��ӽ�(��ʽ��)����ŵ���㶯��II�����[1]���¿���ŵ����III��ȫ��λ����ʹ�����������ԺϽ���Ϊ�����ṹ���Ϻ��-�������Ϊ���ص�Դ����ô��İ���Ŀǰ�Ļ����˻�����̽��RIE�Ͷ���Դ���Լ������������⣬�ƶ�ƽ̨�еij�����С���ֲ���Ҳ�dz�����ơ���ά(2D)�ƶ�����������/XY/��λ̨�ɲ��ù���˿�ܻ�������õĸֹdzݴ�����ϵͳ������ơ����������ᡢ�ٶȿ�Ķ�λ̨��ͨ�ڵġ����Դ�Macron DynamicsiselAutomation(ǰ��ΪTechno Inc.)��������������Dover Motion(Invetech����)������������Դ��á�������Ҫ�о��������������������Ϊ�����֤������ˣ������˵��Ż���Ƴ����������Ŀ�ġ�
�����ƵĻ������У�ͨ����λ����������ѡ�������ʽ��ÿ���ȵ�������ת�Ǽ�������IJ���ģʽ����������open-pcs u�����ɵġ��������顣����ͨ�����������Ϳ�������������(CAN����)�����ӿ�������ִ�����ʹ������Ľ���״�������������������á�������ܣ���ִ��������������ѭ��һֱ�����������˵���Ŀ�ꡣ�������ڵ���Ҫ���ͼ6��ʾ��
6.�ɹ�������
ͨ���ڼ���ͼģ���ϵķ��棬��֤��ǰ�沿�����۵Ĺ��ϵ��ڲ��ԡ���Щ���������ǵ���ֵ���ڱ�1��n��1���ؽ��¶��������������ѱ��ֶ��������Կ��ٺͼ������������Ӧ����̬���������ͬʱȷ����
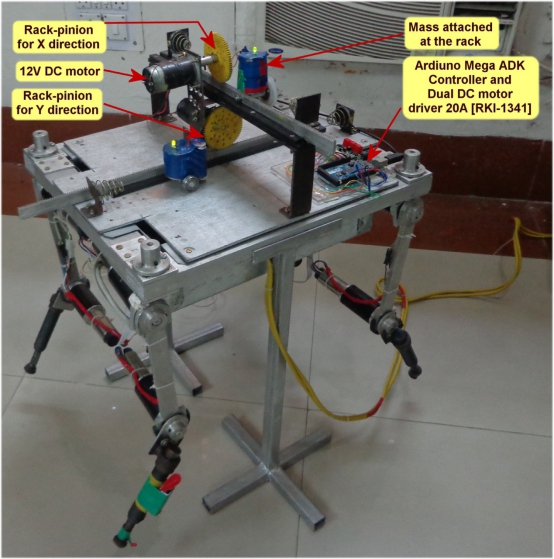
ͼ8.ʵ��װ�ã������ƶ�����װ�õ����������
���õ�����ȶ��ԡ�ͨ������������ģ�ͽ���ģ�⣬����ʵ����ʹ����Щ��гֵ����������ʽ��г�����ŵĻ���ֵ��ժ��Maxon����ĵ��и�����Ӧ��ʵ����ͨ��������˶������������������ֵ�����˵���������������Ӧ��ʵ�鷽������עt�˶�����������ֵ�ƺ���С����Ϊ�����ǹ⻬��(���������˶���ʩ�ӵ�����С)�������ĸ���������С(����������X�����Y����С)����Ч�غ�С����Ч������Գ���(����еĻ�)���������ֱ�(����еĻ�)��С��ע�⣬����Ч�غɵ�һ���ְ�װ���ƶ��������ƶ�����������������С�����������������Ӧ�����ӡ��⽫����һ���汾�Ŀ��������д���������Щ���㶯���У������������ĸ��ӹ��ܣ�����Ч�غɡ����ߵ��ٶȡ����õ����ߺ������ȶ��ԡ��Լ������ݴ��ȡ�
6.1���������ϵ���
�������㶯��Ľ���״������ǽ����ģ������������úܺã�ͻȻ�䣬һ���ؽڴ������ڵ�һ�ȵĵڶ����ؽڷ������ϣ������㶯����С�ܵIJ�̬�ƶ���
��ͼ��ʾ��9(A)��������30.3��ʱ�������ϣ��ɹ��ϼ�����ģ�鼰ʱ���ù��ϡ�Ȼ��ͨ��������������Ϊ���̣��õ�������ֵ����3.2����ʹ�á�������9(B)��ʾ�ߴ�30.3�����ʵ����������(������ͼ��ͬ)��9(A)�������ƵĴ�������������ͼ�п���9(B)��һЩƫ��NS�ڹ�����������ڽ�ģ�������д��������Լ������ද�����������ԽӴ����������������С�ܵIJ�̬�ƶ���������10(A)��ʾ����1 r�����ȵ���ת����������10(B)��ʾ�����ȵĹؽ�2��ת��������������ͼ1����ʾ�ĵ�1�ȵ�ת����9(B)��ע�⣬��1��2��ƽ���ؽ���ת�����Ƶģ�ƽ�����ӡ���3��4��t��ת�����Ƶġ��������ڻ����˵ĺ���������(������)����ͼ��ʾ1.�ڿ첽��̬�У����㶯������Y�������ƶ�����ͼ1��ʾ��11(a)������Z���ƶ�ʾ��ͼ1�С�11(b)�������ͼ1�С�11ʾ�����ƶ����ܲ���HIN,ͨ��ʹ�ù��ƵIJ��������
|
M.M. Gor et al. / Mechanism and Machine Theory 121 (2018) 228�C244
|
239
|
|
Table 1
|
|
|
|
|
Input parameters.
|
,
|
|
|
|
|
|
|
|
Parameters
|
Value
|
|
|
|
|
|
|
Leg parameters
|
|
|
|
|
First link length of leg (l1 )
|
0.225 m
|
|
Mass of first link (Ml 1 )
|
1.1 kg
|
|
Inertia of Link 1, Ixx 1
|
0.013346 kgm2
|
|
Iyy 1
|
0.0073965 kgm2
|
|
Izz 1
|
0.011563 kgm2
|
|
Prismatic link cyl. inertia Ixxc = Izzc
|
0.005144 kgm2
|
|
Iyyc
|
0.000487 kgm2
|
|
Prismatic link piston inertia Ixxp = Izzp
|
0.00168 kgm2
|
|
Iyyp
|
0.000025 kgm2
|
|
Stiffness of the prismatic link (kf )
|
5000 N/m
|
|
Damping of the prismatic link (Rf )
|
274 Ns/m
|
|
Piston-cylinder contact stiffness (kb )
|
108 N/m
|
|
Piston-cylinder contact damping (Rb )
|
103
|
Ns/m
|
|
Piston and piston rod length (lp )
|
0.1 m
|
|
Distance from cylinder CG to the end of prismatic link (lcg )
|
0.05 m
|
|
Distance from piston CG to the end of the prismatic link (lpg )
|
0.07 m
|
|
Prismatic link piston mass (mp )
|
0.2 kg
|
|
Cylinder part mass (mc )
|
0.3 kg
|
|
Cylinder end point position from the body fixed frame in meter, (x2, y2, z2 )
|
(0.0, �C0.05, 0.0)
|
|
Piston end point position from the body fixed frame in meter, (x3 ,y3 ,z3 )
|
(0.0, 0.07, 0.0)
|
|
|
Common parameters
|
|
|
|
|
Mass of body (Mb )
|
6.94 kg
|
|
Inertia of body, Ixb
|
0.1470 kgm2
|
|
Iyb
|
0.1045 kgm2
|
|
Izb
|
0.2466 kgm2
|
|
Ground damping in x, y, z direction (Rgx ,Rgy ,Rgz )
|
1000 Ns/m
|
|
Ground stiffness in z direction (Kgz )
|
106 N/m
|
|
Controller parameters
|
|
|
|
|
Proportional gain of controller (KP )
|
100
|
|
|
|
Derivative gain of controller (KV )
|
80
|
|
|
|
Integral gain of controller (KI )
|
40
|
|
|
|
Joint actuator parameters
|
|
|
|
|
Motor constant (Km )
|
0.0276 Nm/A
|
|
Motor armature resistance (Rm )
|
0.386
|
|
|
Motor inductance (Lm )
|
0.001 H
|
|
Gear ratio (n)
|
230
|
|
|
Moving appendage parameters
|
|
|
|
|
Pitch of rack and pinion pair (p1 , p2 )
|
0.05 m
|
|
Inertia of pinion (Ip1 , Ip2 )
|
0.0001 kgm2
|
|
Mass of rack 1 and 2 (Mr 1 , Mr 2 )
|
0.25 kg
|
|
Motor constant (Kt )
|
0.02 Nm/A
|
|
Motor armature resistance (Ra )
|
0.1
|
|
|
Bearing resistance (Rb )
|
0.01 Nms/rad
|
|
Damping coefficient of stop (Rs )
|
104
|
Ns/m
|
|
Spring stiffness of stop (Ks )
|
103 N/m
|
|
Posture controller gain values (Kpa 1 , Kia 1 , Kva 1 ) and (Kpa 2 ,Kia 2 ,Kva 2 )
|
(3.1, 0.01, 5.5)
|
|
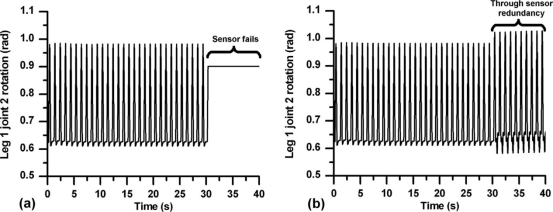 ͼ9.LEG 1����2���������(A)ԭʼ�źź�(B)�ߴ�30.3 s��ԭʼ�źţ������ͨ�����������������
ͼ9.LEG 1����2���������(A)ԭʼ�źź�(B)�ߴ�30.3 s��ԭʼ�źţ������ͨ�����������������
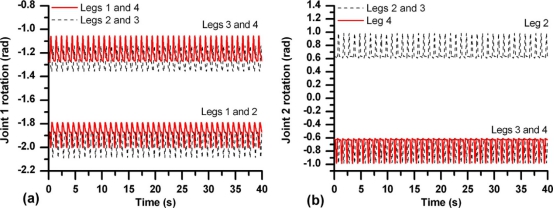
ͼ10.�ؽ���ת��(A)�ؽ�1��(B)�ؽ�2
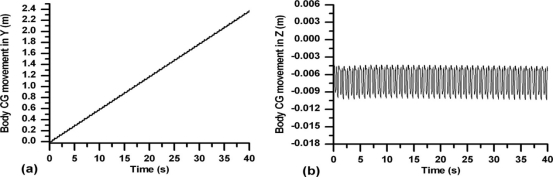
ͼ11.��CG��(A)Y��(B)Z�����˶���
6.2.�¶������ϵ���
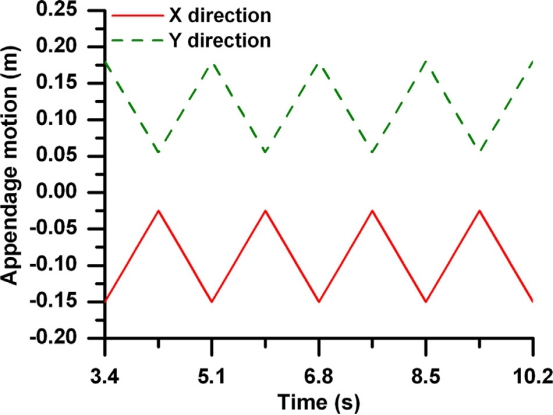
��2.4sʱ��ģ���˵�1�ȹؽ�2��ͻȻʧЧ�����ݿ��Ʋ��ԣ��ڵ�һ����ǰ�˶�ʱ��������װ�ñ��������ĸ�����������һ�Σ�����ͼʹ�䱣�������ĸ��������������һ�࣬ʹ�ɴ˲��������������己ֳ��������������1���Źؽڡ�������12����ʾ��CG��Y�����˶�����Ϊ�������������䣬������ȷ����1����������ʵ��Ӵ�����Ч�����崫�����������������ڽ��������ĸ���̬�����м����˶���������ҪTh�Ĺ��ס��ƶ�������ľ���Ϊ0.362�ף���Ϊ��ʱ����Ӵ����ڵ�һ�ȵļ����ʧ����������ʱ�����ú�С���Ӷ�������ǣ�������۰��������֣��������ƶ�0.430��������˶��ĸ�������ֻ���ǹ��Ϻ�ľ��룬��ô����0.262��û���ƶ��������0��330���ƶ��ĸ������Լ26%�Ķ��������ͨ�����ϵ��ڡ���ˣ�����t�Ŀ��Ʋ��ԣ������˶����ܵõ���ȫ�����ߡ��ƶ�����װ�á�ͼ13��ʾ��x��y����ij����˶���PC���豸һֱ��������λ�ã�ֱ�������κιؽ�ִ�������ϡ��˺�x��Y������Э���ķ�ʽִ�У��Խ�����ת�Ƶ���1����ͼ��ʾ��13.�����˶�ģʽ�ܲ�̬ģʽ���ƣ�pcװ����POSI�����ڵ�һ������ǰ�˶�ʱ��������λ�á��������������ȵ���ǰ�˶�������Ҫ�ʵ���Զ������λ�á������˶�APPEArΪ6.2.���¶������ϵ���
��2.4sʱ��ģ���˵�1�ȹؽ�2��ͻȻʧЧ�����ݿ��Ʋ��ԣ��ڵ�һ����ǰ�˶�ʱ��������װ�ñ��������ĸ�����������һ�Σ�����ͼʹ�䱣�������ĸ��������������һ�࣬ʹ�ɴ˲��������������己ֳ��������������1���Źؽڡ�������12����ʾ��CG��Y�����˶�����Ϊ�������������䣬������ȷ����1����������ʵ��Ӵ�����Ч�����崫�����������������ڽ��������ĸ���̬�����м����˶���������ҪTh�Ĺ��ס��ƶ�������ľ���Ϊ0.362�ף���Ϊ��ʱ����Ӵ����ڵ�һ�ȵļ����ʧ����������ʱ�����ú�С���Ӷ�������ǣ�������۰��������֣��������ƶ�0.430��������˶��ĸ�������ֻ���ǹ��Ϻ�ľ��룬��ô����0.262��û���ƶ��������0��330���ƶ��ĸ������Լ26%�Ķ��������ͨ�����ϵ��ڡ���ˣ�����t�Ŀ��Ʋ��ԣ������˶����ܵõ���ȫ�����ߡ��ƶ�����װ�á�ͼ13��ʾ��x��y����ij����˶���PC���豸һֱ��������λ�ã�ֱ�������κιؽ�ִ�������ϡ��˺�x��Y������Э���ķ�ʽִ�У��Խ�����ת�Ƶ���1����ͼ��ʾ��13.�����˶�ģʽ�ܲ�̬ģʽ���ƣ�pcװ����POSI�����ڵ�һ������ǰ�˶�ʱ��������λ�á��������������ȵ���ǰ�˶�������Ҫ�ʵ���Զ������λ�á�
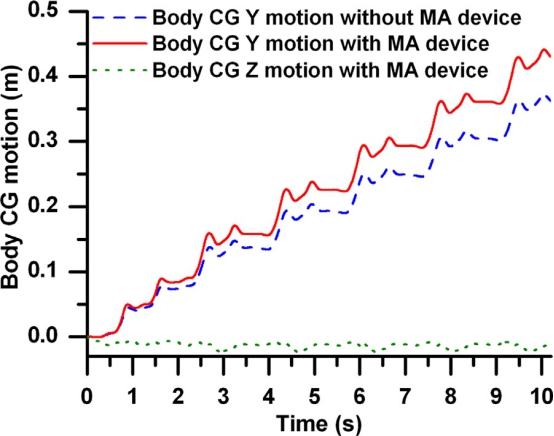
ͼ12.����CG�˶�
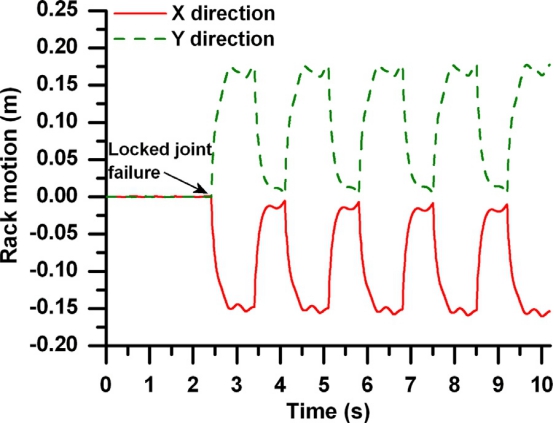
ͼ13.�����˶�
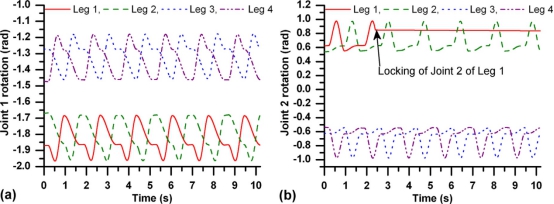
ͼ14.�ȹؽ���ת��(A)�ؽ�1��(B)�ؽ�2
ͼ14(A)��(B)��ʾͬһʱ���������ȵĹؽڷֱ�Ϊ1��2��ת����Щ�ؽ���ת�ܲ�̬�Ŀ��ƣ���ʹ��������joi֮��Ҳ����ı䡣����һ���ȹؽڹ��ۡ�
����������Ҳͨ��ʵ��õ�����֤������Ҳ��������1������2��ʧЧ������ͨ���̶����ļ������������е�ʵ��ģ�⡣ֵ��maxon����������е�ֵ��

ͼ15.��ʵ����ʹ�ó�������װ�ý��б������ӹ��ϵĶϳ�(A)�������ĵ�MA��(B)MAԶ�����ġ�
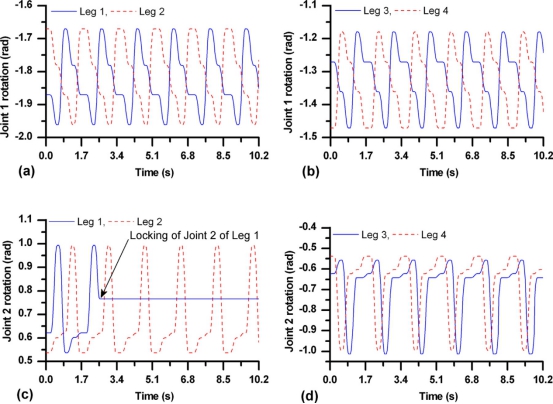
ͼ16.С�Ȳ�̬ʵ���еĹؽ���ת��(A)�ؽ�1����ת1��2(B)�ؽ�1��3��4ת����(C)�ؽ�2��1��2��ת��(D)�ؽ�2���������ȡ�
һ����ʱ�䣬�����ṩ�����Ĺؽ�Ť�أ��Է�ֹ����ת��������15����Ƭ��ʾ�����������û��ܳ���d��������ͷʧЧ��ʵ���У������н�ͼ���ӱܡ������˲������ݴ洢�ڱ�Яʽ������С���ˣ��ӻ����˵��������USB���¿�������Ƭ�п�����ͬ���������˵ĵ�ԴҲ���ṩ�ġ��ӽ�����Դ��ֱ����Դ���ⲿ�������дӵ�Դ����ÿ��ִ�����Ķ����ĵ�Դ���¡������Դ�Ǵӳ��ص������ȡ�ģ���ôbaTREY������Ϊһ����Ч�غɣ�Ϊ�˽�SUffi������ת�Ƶ�ʧ�ܵ����ϣ������밲װ�ڻ����ϡ�����谭�����˶�����Ұ����ǰ�Ļ�������n���ڿ����е�ʵ��ԭ�ͣ��������������������ԵIJ��䡣��ע�⣬�ڻ����˵����տ����汾�У����г��ص�Դ�����ݡ�һ����¼�����⽫����ʹ���ⲿ���¡�
ͼ17.�ڻ����˹���״̬�£���ʵ������н����˶�ʱ��ĸ������˶���
ͼ16(A)��(B)�ֱ���ʾ�ؽ�1��1-2��3-4��ת����ͼ1��16(C)��(D)��ʵ���зֱ���ʾ����1-2��3-4�Ĺؽ�2����ת�������˶������ڼ��״̬��ͼ��ʾ��17.���ݹ۲죬���û�������ƶ��ĸ�����װ�ã��Ȳ�ʧ������㶯����5�������ڵľ���Ϊ0.30�����ң�����֫Ϊd�����ķ��о���ԼΪ0.348�ס����ֻ���ǹ��Ϸ�������г̣���ô����0.222��û���ƶ�������0.27���ƶ���������Լ22%�Ķ������ͨ�����ϵ��ڸ��ǡ���ʵ������ͨ��ģ��õ��ľ���IJ�����Թ�����ģ�͵IJ�ȷ���ԣ���Fri���ڵ������ȼ�֮������Ӵ���Ŀɱ们�ƣ���ִ�л����в�����϶����������������ڵ����ϵĵ��£����Ʋ�ȷ����ģ�Ͳ���(��Ҫ�ǹ��Ծ�)�������������Ӧ�ӳٲ�ƥ�䣬�Լ�����δ��ģ���ⲿ�Ŷ���
7. �ܽ�
ִ�������ϸ�����������˵��˶������Ľ����˰�װ������������ϵ����ɿ��Ƶ��ƶ�����װ�ã�����������С���ֲ��á���������˵�ִ��������(���Ϲ���)���ڡ�ͨ���ع����ƣ����������ڹ��ϵ��ڷ�������൱��ffi����Ϊ�����Ƶ�m���Ȳ���ǰ�˶�ʱ�����ʵ��ؽ�����ת�Ƶ�ʧ�ܵ����ϣ�ȷ��ʧ�ܵ��Ȳ���������ýӴ����ṩǣ����RCE����֧�ֽΡ������о���ʵ������������˶�����װ�õ����ã��û����˱�WITH�������ܸ�Զ���˶����ɵ�����ͬ��������բ�����ڸ��ǵľ�������Դ���20%����ˣ����ڿ��Ʋ��Ե�ʵʩ�������˶����ܵõ���ȫ�����ߡ������ƶ�����װ�õ�ED�����⣬һ�����������ϵȿռ�ս�Ե���������Կ��������ȹؽڣ��Źؽڻ�ϥ�ؽڣ����������Ϻ��Խ��н�һ�����˶�O��UTͨ���������ں��㷨�������������������������ݡ����������Ϻ�ִ�������ϵĵ�������ų��(��ͼ)��6)��ˣ������Ļ����˿���ģ���һ����������һ��ִ���������������ָ�������Ӳ����ִ�л���(����ƶ�����)�ʹ�����(����ȼ�λ�ô�����)������������co������������˻����˵�����ɿ��Ժ����ܡ����Ľ���������Ӳ��(�ƶ�AP)�е����嶨λ��������ִ�������������Ĺ��ϡ�)��û�п��ǹ����������Ļ����˻����ڷ�չ�Σ��ڴ����������лָ����滹���ڷ�չ�Σ���������Ӳ�����������ϵĻָ������������ഫ������ִ�������ϡ��˶��ȶ��Ժ�����ٶȶ��ڿ���֮�С�
��л
M. M.Gor��P.M.Pathak��A.K.Samantaray�Ĺ�����ӡ��DST��������ӡ��-������ѧ���������о���������INT/����/P-13���������S�Ĺ�����W.Kwak�ɴ���������о������������VIDE�����š�NRF-2011-0027705��
�����
[1]F. Tedeschi, D. Cafolla, G. Carbone, Design and operation of cassino hexapod II, Int. J. Mech. Control 15 (1) (2014) 19�C25.
[2]F. Tedeschi, G. Carbone, Design of hexapod walking robots: background and challenges, in: M.K. Habib (Ed.), Handbook of Research on Advancements in Robotics and Mechatronics, IGI Global, USA, 2015, pp. 527�C586.
[3]H. Berriri, M.W. Naourar, I. Slama-Belkhodja, Easy and fast sensor fault detection and isolation algorithm for electrical drives, IEEE Trans. Power Electron. 27 (2) (2012) 490�C499.
[4]I. Jlassi, S. Khojet, E. Khil, A MRAS�CLuenberger observer based fault tolerant control of pmsm drive, J. Electr. Syst. 10 (1) (2014) 48�C62.
[5]B. Ould Bouamama, K. Medjaher, M. Bayart, A.K. Samantray, B. Conrard, Fault detection and isolation of smart actuators using bond graphs and external models, Control Eng. Pract. 13 (2) (2005) 159�C175.
[6]A.K. Samantaray, K. Medjaher, B. Ould Bouamama, M. Staroswiecki, G. Dauphin-Tauguy, Diagnostic bond graphs for online fault detection and isolation, Simul. Model. Theory 14 (3) (2006) 237�C262.
[7]Y.-J. Lee, S. Hirose, Three-legged walking for fault tolerant locomotion of a quadruped robot with demining mission, in: Proc. IEEE/RSJ Intl. Conf. intelligent Robots and Syst., 2000, pp. 973�C978.
[8]J.-M. Yang, Fault-tolerant gaits of quadruped robots for locked joint failures, IEEE Trans. Syst. Man Cybern.-Part C 32 (4) (2002) 507�C516.
[9]J.-M. Yang, Crab walking of quadruped robots with a locked joint failure, Adv. Robot. 17 (9) (2003) 863�C878.
[10]J.-M. Yang, Two-phase discontinuous gaits for quadruped walking machines with a failed leg, Robot. Autonom. Syst. 56 (9) (2008) 728�C737.
[11]M. Blanke, M. Kinnaert, J. Lunze, M. Staroswiecki, Diagnosis and Fault-Tolerant Control, Springer, London, 2006.
[12]R. Isermann, Fault-Diagnosis Systems: An Introduction from Fault Detection to Fault Tolerance, Springer, London, 2005.
[13]D.C. Karnopp, D.L. Margolis, R.C. Rosenberg, System Dynamics: Modeling and Simulation of Mechatronic Systems, Fourth edition, John Wiley Sons, New Jersey, 2006.
[14]A. Mukherjee, R. Karmakar, A.K. Samantaray, Bond Graph in Modeling, Simulation and Fault Identification, CRC Press, FL, 2006.
[15]W. Borutzky, Bond Graph Methodology Development and Analysis of Multidisciplinary Dynamic System Models, Springer, 2010.
[16]G. Dauphin-Tanguy, Les Bond Graphs, Hermes Science, Paris, 2000.
[17]R. Merzouki, A.K. Samantaray, P.M. Pathak, B. Ould Bouamama, Intelligent Mechatronic Systems, Springer-Verlag, London, 2013.
[18]M. Karthikeyan, A. Bisoi, A.K. Samantaray, R. Bhattacharyya, Sommerfeld effect characterization in rotors with non-ideal drive from ideal drive response and power balance, Mech. Mach. Theory 91 (2015) 269�C288.
[19]S. Junco, A. Donaire, A. Achir, C. Sueur, G. Dauphin-Tanguy, Non-linear control of a series direct current motor via flatness and decomposition in the bond graph domain, Proc. IMechE. Part I: J. Syst. Control Eng. 219 (2005) 215�C230.
[20]M.M. Gor, P.M. Pathak, A.K. Samantaray, J.-M. Yang, S.W. Kwak, Reduction in body disturbance of quadruped robot using two moving appendage, in: Proc. Intl. Conf. Bond Graph Modeling and Simulation (ICBGM��2014), 46, Monterey, California, July 6-10, 2014, pp. 85�C92.
[21]V.L. Krishnan, P.M. Pathak, S.C. Jain, A.K. Samantaray, Reconfiguration of four-legged walking robot for actuator faults, in: Proc. IMechE Part I: J. Systems and Control Engineering, 225, 2011, pp. 1�C16.
[22]A.K. Samantaray, B. Ould Bouamama, Model-based Process Supervision, Springer-Verlag, London, 2008.
[23]C. Llamas, M.A. Gonz��lez, C. Hern��ndez, J. Vegas, Open source platform for collaborative construction of wearable sensor datasets for human motion analysis and an application for gait analysis, J. Biomed. Inf. 63 (2016) 249�C258.
[24]J. Huang, W. Xu, S. Mohammed, Z. Shu, Posture estimation and human support using wearable sensors and walking-aid robot, Robot. Autonom. Syst. 73 (2015) 24�C43.
[25]T.K. Bera, R. Merzouki, B.O. Bouamama, A.K. Samantaray, Force control in a parallel manipulator through virtual foundations, Proc. IMechE Part I: J. Syst. Control Eng. 226 (8) (2012) 1088�C1106.
[26]J.J. Craig, Introduction to Robotics Mechanics and Control, 3rd ed., Pearson Education, USA, 2005.
[27]T.K. Bera, A.K. Samantaray, R. Karmakar, Bond graph modeling of planar prismatic joints, Mech. Mach. Theory 49 (1) (2012) 2�C20.
[28]A.K. Samantaray, A. Mukherjee, User Manual of Symbols Shakti, Indian Institute of Technology Kharagpur, High Tech Consultants, 2000.
[29]A. Mukherjee, A.K. Samantaray, System modelling through bond graph objects on symbols 2000, in: Simulation Series, Society for Modeling & Simu-lation International (SCS), 33, 2001, pp. 164�C170.
[30]M.M. Gor, P.M. Pathak, A.K. Samantaray, J.-M. Yang, S.W. Kwak, Dynamic modeling and simulation of compliant legged quadruped robot, in: Proc. INaCoMM 2013, Roorkee, India, 2013, pp. 7�C16.
[31]M.M. Gor, P.M. Pathak, A.K. Samantaray, J.-M. Yang, S.W. Kwak, Control oriented model-based simulation and experimental studies on a compliant legged quadruped robot, Robot. Autonom. Syst. 72 (2015) 217�C234.
[32]M.M. Gor, P.M. Pathak, A.K. Samantaray, J.-M. Yang, S.W. Kwak, Control of compliant legged quadruped robot in workspace, Simulation 91 (2) (2015) 103�C125.
, �������������ͨ���ƶ����������Ĺ��ϵ���
������MM Gor �� PM Pathak �� AK Samantaray �� JM Yang �� SW Kwak
��Դ�� ��Mechanism & Machine Theory�� , 2018 , 121 (1) :228�C244
ժ Ҫ
�������Ȳ���������ȣ�����������ṩ�˸��õ��ȶ��Ժ��ٶȡ�Ȼ������ؽ�ִ����������������Ӱ�����˶������������Ǻʹ������IJ��Ա����������˳�����㶯��Ĵ�����ڡ������һ��������װ���ƶ������������Խ�������ؽ�ʧЧ���⡣��Щ����֫֫ES��Ϊ���ܰ�װ�Ĺ��ԣ���ִ����ʧЧʱִ���ܿ��˶��������һ�ִ��������ϵ��ڲ��ԡ�����R����ά���嶯��ѧģ�����ü���ͼ��ģ�����������OBOT������ϵ��ڲ��ԡ�ͨ�������ʵ����֤�˸ÿ���ϵͳ�����ܡ�
1. ����
�ƶ������˴����ѭ������Ʒ�������һ�ֻ�������������֧�ŵģ���������ƽ̹�ĵ����ϸ����˶��������ڲ����ȵı����ϲ��������Ļ������ǵ�ϰ�ס���������Ⱦ������ڶ�������������Ϊ���������ٶ�Ϊ���ۣ��ڵ�����������ϵȷ����ṩ���õ��˶�������T�ͺ�����һ�ֻ����ƣ���ϳ������ȼ⣬���ṩһ�����Ե���ơ�����ŵ���������[1]��һ�ֻ���ƶ������ˣ�������ƽ̹�ĵ����Ϲ������ߡ��ڲ�����ĵ����ϡ����ڶ��Ȼ����ˣ���Ҫ�������ʵ��������־�̬�ȶ���.����Ϊ������һ������Ҫ�ӵ�����̧���˶�ʱ���������С�������������������������ӣ����������ƶ������е��ȶ������ӣ������˿����ڳ��ֹ��ϵ�����¼���������������[1]�����⣬�������Ҳ������Ϊ�ֲ����Ա���в��������ƶ��������������[2]���Ȳ���������Ļ����˵ķ�չ��Ȼ������������˵��˶��ٶȺ�����Զ�������������ˡ����ڵ��͵���������ϡ���̨�ȣ���Խ����ζ��Խ���ӡ�����ģʽ�����ǿ��������һ�������е���ƥ��С�������ȶ����ͼ��������Ȧ����������̫����֫��ص����⡣�ȵ��˶���Ӧ���ڱ˴��٣����Խ��Խ����ȣ��������ٻ����˵ij��ȵ����ӣ������ϡ���ǧ��棩�����ⷽ�棬�����ȵĻ����������˶��ȶ������˶�����Ժ��ٶ�֮���ṩ�˺ܺõ����ԡ�Ȼ�����������ද�ﲻͬ���ǣ������ද�������Գ��������ȵ�ʧЧ(������ijЩ�������)�����㶯�����ȹ���ʱ���ܺܺõز�������������������㶯���Ȳ������ֹ��ϣ�����˲�����������Ľ��顣���ƶ����������ʽ���˷�����ϰ���
��ȫ�ԺͿɿ������κ�����ϵͳ����еĹؼ����⡣�����������ָ��Σ�յĻ����й�������������ִ�������ϸ��п��ܷ������������Ļ����£������˱�Ͷ�빤��.����ˣ��ݴ�����(FTC)���ع�����������˵�һ�������о������������У������Ҳ�������������������������������ˡ�Ȼ�����������о���Ա�����ڴ��������ϼ��������ϵͳ[3��4]������ϵͳ[5��6]��λ�ô���������ͨ���������ࡢӲ�����������ͬʱ���ͷ��롣Ӳ��������һ�ֿɿ��Ľ�������������ڳɱ��Ϳռ�����ƣ���ʹ���ܵ����ơ�������������Ľ��������Ҫһ�����Ƶġ���Ч����ѧģ�ͣ��������ɲв��Ԥ������ϲ�����ʵ�ʲ���֮��IJ��졣����������[5]����Щ�в�������������������ϵͳ�еĸ��ֹ��ϡ�
��ִ����������£������ؽ�ʧЧ��һ���˶����ϣ������ֹ����£��ؽڲ����ƶ��������������ʵ���λ�á�Ȼ���������֧������������������������ԣ�f����ʵ��ز��𣬹̶����ȿ��ܶԻ����˵��˶��в��ֹ��ס��������Ħ�������ѵ�ԭ��������ͷʧЧ��Ϊ�������������ƽ�����ֵĶϳݶ��������ת����IJ�����/����������������£�����ͨ��ʵ���ݴ���̬ģʽ��ʵ���˶������߽����ƹ���Ӧ��������Ӳ����[7-10]������˲�ͬ���ݴ���̬���Խ�������Ĺؽڹ��ϡ�ͨ����������[11��12]����������accom���ڱ��ñ����豸(��ΪӲ������)��ʵʱ����/���ȡ���˹���ִ��������ʹ��������Ӧ���ĺ��ϵͳ�ṹ��
����˴�������ִ�������ϵ��ڲ��ԡ��ڹ���״̬�£�������/ִ�������ܻ��в�ͬ�ķ�Ӧ�������������Ϊ��Щ�ڸ���������û�з�Ӧ��̩�ݡ����ഫ�������ڼ���������.��ִ�������ϱ���Ϊ���������ϡ�Ϊ����Ӧ��һ���ϣ�ʵ���������ƶ�����(MA)������˳���ʽС���ֵIJ�����ʽ������װ����Ϊһ������Ӳ����ֻ�е�������������������ؽ���������ʱ���ܼ�����ĵĹ���������ͨ�����ֲ��ã�������Ч��ʵ�ֹ���(���Ϲ���)���ڡ�Ϊ����ʾ������Ŀ��Ʋ��ԡ����ü���ͼ����[13-16]�����˲��л����˵�MICģ�͡�����ͼ��һ�ִ�������ʽ������������ϵͳ��ģ��effi���ߣ����ֿ��Ʋ��Զ�����ʵ�֡�ͨ����������ʽ��չ[17-19]��
���ĵĽṹ���¡��ڶ��ڽ�������������ƶ�����װ�á������ڽ����˴�������ִ��������(������ͷ)�IJ��ȴ�ʩ����̬����ģ�͵�4�ں͵�5�ڷֱ������ʵ����ʹ�õ�����ģ�͡��ڵ������У���������֤������IJ��ԵĽ����������ڶԱ��Ľ������ܽᡣ
2.�ƶ�������װ��
ͼ�и�����һ�����������ƶ���������˳����������˵�ԭ��ͼ��1.����������˵�ÿһ��������������ɡ�����1���������t��������ת�ؽ�(�Źؽ�)��������2��ͨ����ת�ؽ�(ϥ�ؽ�)������1��װ��������������˵Ľ�ģ���ѿ��{A}��������ϵ�������̶����{B}�����ڻ���������������ϡ���ÿ�����ϣ����{0}�̶����Źؽڣ�{1}�̶��ڹؽ�1�������֡{0}��{1}�غ���һ��ӡ����⣬���{2}�̶��ڹؽ�2��ϥ�ؽںͿ��{3}�̶����ȵĶ��ˡ�
�ƶ�������װ�ð�װ�ڳ�����������װ��Ҳ��Ϊ��̬����(PC)װ�ã���Ϊ�����ڿ�����������˵���̬[20]��Ȼ��������str��̬���Ʋ��Բ�ͬ�ڹ��ϵ��ڲ��ԡ��������Ƚ�����pcװ����ƽ��ʸ״���ع��е�Ӧ�á����������ģ�͡�������ͼͨ����άģ�͵��ع�����Ӧ�����ڵ��ʧЧ����ͨ��ʵ����֤�˸÷�������Ч�ԡ�
�ƶ������ɳ�����С������ɣ�����С�����ɵ������������ֻ�������ṩ��·��/����ִ��ֱ���˶��������˶�����λ�õı仯(CG)����ˣ�ͨ������С���ֵ���ת�˶������Կ�������ķ���X��Y����λ������aNd������ͨ�������ƶ�����װ�������ơ�
Ϊ�˸������ͼ1��ʾ�������Ƹ�����(��)���ƶ�������ʾ��ͼ��
�������������Ŀ������ƶ��ij������˶����������á�
���Ʒ��������ƶ���������y�����г����˶��������˶���������Rack 1������ڹ���ϵ{A}��CG��λ�á�
|
Yr1
|
= YCG − l cos ��
|
(1)
|
|
Zr1
|
= ZCG − l sin ��
|
(2)
|
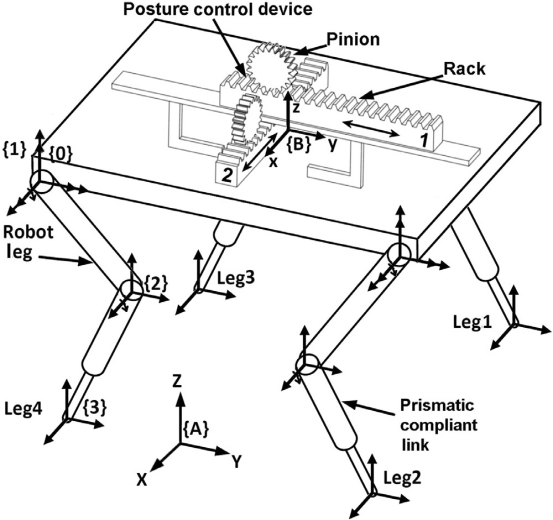
ͼ1 ����������ƶ����������ԭ��ͼ��
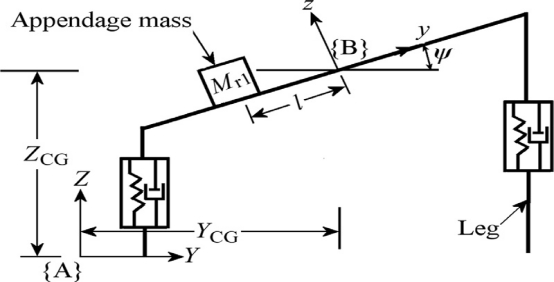
ͼ2 ���Ƹ����ǵ��ƶ�������ʾ��ͼ��
����l�Ǵ��ƶ��������������ĵ��������ĵľ��룬��С���ֽ�Բ�뾶(P1)��С����(��p1)��������ܡ�YCG��ZCG����CG�����֡{A}�����ꡣ�����˳�����Y�����Z�����ϵ��ٶ���
|
�B
|
�B
|
|
�B
|
cos �� + p1
|
��p1
|
�B
|
(3)
|
|
Yr1
|
= YCG − p1
|
��p1
|
�� sin ��
|
|
�B
|
�B
|
|
�B
|
sin �� − p1
|
��p1
|
�B
|
(4)
|
|
Zr1
|
= ZCG − p1
|
��p1
|
�� cos ��
|
���������嶥����λ�þ����˸����ǡ���ˣ���������������λ��(������)�������ɿ���д����
|
p
|
��
|
p1
|
cos �� M
|
r1
|
g
|
=
|
K∗
|
(��
|
d −
|
�� )
|
K∗
|
(���B
|
d −
|
���B )
|
+
|
K∗
|
(��
|
d −
|
�� )dt
|
(5)
|
|
1
|
|
|
|
p1
|
|
|
+ v1
|
|
|
i1
|
|
|
|
����MR1�ǻ���1��������g���������ٶȣ���d�����ֱ���������X�ḽ
������ڹ���Re�������ʵ�ʵĽǶ�λ�ơ�F_1֡{A}��KP1∗��KV_1∗��Ki_1∗�ֱ��ǿ������ı������桢��������ͻ������档�������С���Գ���km�Ŀ��ٶ��������armature����RM���͵�У��ڵ�ת�ٵĵ��ת�ؿɽ��Ƶ���ʧ��ת�أ���T1 =���V1−�����ȨBP1��/ RM��kmv1 / RM�����ּ���������Ҫ�����ڲ��ø��ٳ���ʱ����Ч������Գ����������ͣ���������ڳ��ִ�����UE����Ϊһ����֤�������ü���ͼ�����ʣ�g��һ����ϴ������(ģ��k)��yrator�ʹ�������(ģ��r1)�ı�ѹ������������תģ�������Գ���k/rk�Ļ�ת�����Ч����Դ˳������ֵ��������Ť���������λ�ó����ȣ��������ĽǶ�λ�á�
ȫ�ױ�ҵ��������ֳɳ�Ʒ��������ѯ
