卡车自动排队紧急躲避和制动研究
郑仁成,成员,IEEE,kimihikonakano,ShigeyukiYamabe,
MasahikoAki,HirokiNakamura,andyoshihirosuda
摘要
在开发卡车自动排队作为节能技术时,排队卡车的可靠驱动是公共实施和未来应用的主要目标。同时,还需要确保卡车自动排队的驾驶实验的安全性,包括系统故障的条件。本文介绍了使用驾驶模拟器(DS)和实际车辆实验的卡车自动排队的紧急避免制动的详细实验研究。此外,对于排队的卡车的制动能力的修改被应用于安全控制。因此,在自动排队故障的紧急情况下,驾驶员可以制动而不会发生追尾的风险。首先,建立了一个实验平台,用于在先进DS系统中自动排列卡车。假设系统故障前方卡车的紧急减速而没有警告,则在紧急避免碰撞的情况下研究下面卡车中的驾驶员的行为。特别地,对于随后的卡车的制动系统的平均最大减速度的不同设置,在使用高级驾驶模拟器(DS)和实际车辆的驾驶实验中分析停车间隙距离和驾驶员反应时间。实验结果表明,当自动排队系统故障时,导致后面的卡车的平均最大减速度高于前面卡车的平均最大减速度,紧急制动是避免后端碰撞的有效方法。
关键词
自动排队,制动反应时间,司机的行为,紧急停车距离
1.介绍
不同类型的自主和合作驾驶已经并正在开发,构成新的技术挑战。相应地,智能交通系统(ITS)中人为因素的相关研究逐渐变得更加重要[1][2][3][4][5][6][7][8]。通信和自动化技术用于保持多个卡车的紧密间隙距离以降低空气阻力,即卡车的自动或自动排队,希望实现低燃料消耗和高交通密度[9][10]。已经确定,当三排全自动卡车的排在80km / h以10米的间隙距离在测试轨道上和高速公路行驶时,三卡车列的平均能量消耗可以提高约14%[11]。然而,当考虑自动排中的系统故障时,避免碰撞仍然是该驾驶实验的关键问题之一[12]。本实验研究侧重于在卡车自动排队时,紧急制动情况下驾驶员的行为。
在混合交通环境中,其他车辆可能楔入前线,这总是伴随紧急减速[13]。此外,在系统故障或其它异常情况下,驾驶员必须操作紧急制动以避免碰撞,特别是对于狭窄的间隙距离。
追尾通常被认为是交通事故的主要原因,并且大量的人体工程学研究努力已经针对制动反应时间的分析[14][15][16][17]。 相关研究不仅限于正常驾驶的车辆,而且还考虑到肢体残疾驾驶员[18]及自适应巡航控制和主动转向自动车辆的驾驶辅助系统[19]。然而,迄今为止对制动反应时间和驾驶员行为的调查很少或根本没有。因此,紧急制动已成为卡车节能自动排队项目的重点研究领域。
仅仅通过考虑卡车跟随模型中的紧急制动,当后面的卡车的完全制动力高于前面的卡车的制动力时,可以提高驾驶安全性。因此,本文提出增加全力制动,以提高自动排行驶时紧急制动的安全性。此外,通过全力制动测试来评估驾驶员在实施紧急制动时的行为,以评估卡车自动排队的安全性。因为全力制动试验涉及到实际卡车实验的高风险[20],一个驾驶模拟器(DS)实验被采用,首先调查全制动测试。
在会议上提出初步结果[21][22],本文通过分析驾驶员在DS中和实际车辆实施紧急避险制动时的行为扩展了工作。DS实验的动机是分析驾驶员行为,并在自动排行驶情况下通过紧急制动进行初步评估。实际车辆实验的动机是验证拟议的紧急制动策略的安全性,并确定其在实际自动驾驶中的适用性。
本文首先介绍了一种自动排队的DS系统。然后提出DS实验,涵盖在紧急情况下驾驶员行为和驾驶性能的分析。此后,检查实际车辆实验以进一步验证DS实验的适用性。
2.方法
2.1高级驾驶模拟器
为了准备DS实验,重建高级DS以再现卡车的自动排行驶。如图1 所示,DS主要包括具有用于交通图形系统的两个侧视镜的360°屏幕,一个6自由度斯图尔特运动平台,一套实际车辆的操作系统以及中央计算机。移动平台的最大加速度为4.9 。此外,使用用于自动转向系统的电控制单元来实现车辆的自动驾驶。
。此外,使用用于自动转向系统的电控制单元来实现车辆的自动驾驶。
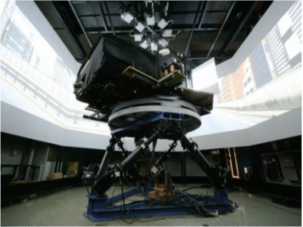
图1 高级驾驶模拟器
通过一个集成的实时数字信号处理与控制工程(dSPACE)系统(dSPACE GmbH,德国)和TruckSim(机械仿真公司,美国),汽车动力学可以在先进的DS系统再现。此外,dSPACE和TruckSim图书馆的重叠使用Simulink库(MathWorks公司,美国)。利用信号、制动,、加速、转向从TruckSim间隙距离控制,仿真算法的编程实现自动队列的卡车。
2.2间隙距离控制
为了实现卡车的自动排队,应用间隙距离控制来实现其速度控制[23]。在这种情况下,xi、VI、ui是卡车的位置,速度和加速度的。加速时,则车辆的运动方程可以表示为
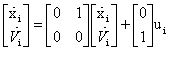 (1)
(1)
间隙距离误差 和速度误差
和速度误差 可以分别定义为
可以分别定义为
 (2)
(2)
 (3)
(3)
在这里L是卡车的长度,d是间隙距离的目标值,并且Vir是第i辆卡车目标速度。在本文中,目标间隙距离为10 m,如图2所示,卡车的目标速度为80km / h。

图2 前面的卡车的图像具有10米的间隙距离。
2.3通过紧急制动避免
在本研究中考虑了一种系统故障的情况。当在排列系统中卡车和自动车辆控制之间的通信失败时,前面的卡车同时进行紧急停止,而没有提前警告。在下面的卡车司机必须在紧急情况下手动刹车,以避免碰撞。
如图3所示,相关指标基于制动顺序定义[24]。驾驶员的反应时间是从尾灯点亮到制动踏板操作开始的时间计算的。制动器响应时间是制动踏板操作到使用全力制动的平均最大减速时的开始时间。平均最大减速时间是从平均最大减速度的开始到结束。停止间隙距离是两辆卡车停止后的距离。停止间隙距离的负值仅用于指示和评估后端碰撞的程度。
