管道爬行器和其他特殊情况
有许多不常用的移动机器人的应用。一个特别有趣的问题是从内部检查和修复管道。放置一个机器人在管内的,有时不需要挖一段街或其他障碍物阻挡进入管道。机器人可以被放置在管内一个方便的位置,只需隔离管内现有的关节或阀门。这些管道机器人,俗称管爬虫,是非常特殊的设计,由于特殊的环境,必须由它们工作。管爬虫已经存在在检查,清洁,和或修理在管道的核反应堆,在城市的街道水管,甚至是上下五英里长的油井。
虽然对环境的形状可以是圆形的和可预测的,但管道爬行器运动系统仍有着许多问题。车辆可能需要到处去走急弯,通过焊接,渗水,或粘接缝。一些管道都非常硬,爬虫可以用力推撞向墙壁作为牵引,有些是很软,如加热管要求履带是既轻又柔软。一些管道输送滑油或非常热的水。一些管道,像水,电源和石油管道,直径可以大到几米; 其它管道是小至几厘米。一些管道沿其长度改变大小或部分有不规则的形状。
所有这些管道类型都需要有自主机器人。事实上,管爬行机器人必须频繁前往工作地是因为它们完全自主,它可以是到目前为止,这是几乎不可能,拖动的绳索或通过无线电联络向机器人时,它是内部的 管。其他管道爬行器拖动绳索,可以放置在大负载履带,迫使它设计来将很难,尤其是在走一个垂直的管道。所有这些不寻常问题的地方,对履带的机械部件和运动系统有很高的要求。
在这些类型的机器人末端效应通常是检查工具测量壁厚或相机目视检查表面状况。有时候,机械工具,被用来刮去表面的铁锈或其他的腐蚀,在管壁插塞孔,或者,在油井的情况下,在管壁吹孔。这些效应并不复杂机械,本章将重点放在需要不寻常的移动系统环境和不同寻常的方法来推进包括外部管行走和移动。在下面的图中所示的管道爬行器机理给了一个在各种管内移动的概述。一个和另一个之间的选择必须根据管道,输送物料的特定属性,如果机器人要在工作原位或干管。除了那些在这本书中所示,有对设计的移动机器人和许多其他的技术和布局的管道或容器。
水平爬行器
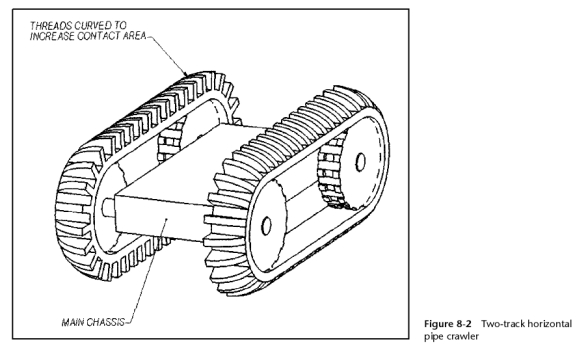
在水平管管道运动是和在水平地面上驾驶非常相似。履带必须有一定程度引导能力,因为它必须判断出管道角落情况,而且还因为它必须呆在管底部也可能撞到了墙壁和翻倒。在四轮市场有许多水平管道爬行防滑履带驱动原理,也很常见。轮式管履带车轮形状特殊,以符合圆形管壁的形状,跟踪爬虫的胎面倾斜也是同样的道理。这些车辆的悬架和运动系统经常出现也很简单。图8-1和8-2展示了两个例子。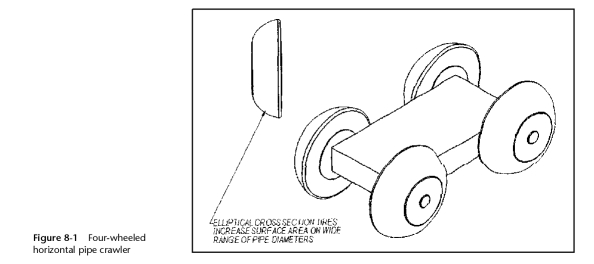
垂直爬虫
机器人车辆在垂直管移动的设计必须要有办法把对管壁产生足够的摩擦。有两种方法能做到这一点,跨越管道有反向管壁的推力,或将磁铁装在轮胎或履带胎面。一些湿滑的金属管道需要结合极大反向墙的力和特殊的胎面材料或形状。一些管道太软而不能承受太多轮胎或履带的力量,必须使用一个系统,使管道能大面积负载。
垂直管系爬虫还有一个问题要考虑。在垂直管直线上升乍一看似乎很简单,但作为履带穿过管它经常由于畸形履带轻微错位于管道的表面而螺旋上升。这种螺旋缠绕的缆绳,最终扭曲而被破坏。解决这个问题的方法是将系绳通过旋转接头的底盘,但这带来了一定程度自由度,且该设计复杂,昂贵。多节履带是一个更好的办法,是让少量的一部分导向的运动。
关于垂直管道爬行器的牵引技术
至少从四个放面处理设计处理与牵引问题。
*钉,螺柱,或齿牙
*磁铁
*研磨剂或防滑涂层
*像氯丁橡胶的高摩擦材料
每种类型都有自己的优点和缺点,都应仔细研究部署一个机器人,机器人在管道内不会卡住会是非常困难的。管道表面的条件和在管道的任何活动或剩余材料,也应被研究和了解保证处理或材料不会被化学袭击。
尖刺,钉,或带齿的轮子或履带仅可用在内部损伤是可以接受的管。镀锌管会因刮伤而导致腐蚀,和一些硬塑料材料的管可能因力产生划痕,裂纹。其优点是,它们可以产生很高的牵引力。尖刺车轮证实在油井使用中,它可以经得起滥用。他们所需要的是履带式跨越的内管,这样他们可以推压相对的管壁。
磁性轮的优点是车轮可以自己吸在管壁;缺点是管道必须是铁类金属。磁铁将需要有运动系统在墙壁上提供力,从而降低了管道应力。他们也有优势,履带可以更小因为它不再需要跨越一个大的管道整体。利用磁轮不限于管的爬虫和被任何被视为的机器人,将花费其大部分生命行驶在铁管表面。
用磨料浸渍橡胶轮胎,铁和塑料管,但如果磨料装入这些类型会因松散的有效性的泥流而磨掉,某些类型的磨料,能掌握干管表面以及齿面清洁,并产生更少的损害。
高摩擦橡胶履带在许多应用程序控制下工作,但必须注意使用正确的橡胶化合物。一些橡胶能保持状态甚至在潮湿的粘性环境,但其他一些橡胶会变得很滑。一些化合物可以迅速地在找到腐蚀管道的流体。并且它们对管壁无损伤,是简单而有效的牵引技术。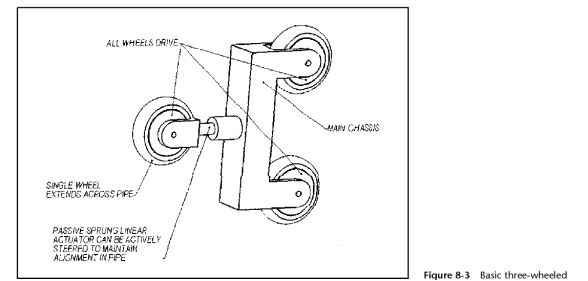
轮式垂直管道爬行器
轮式管道爬虫,像他们的陆上表兄弟,是最简单的垂直管道的爬虫类型。虽然这些类型使用的车轮没有轨道,他们仍然被称为管爬虫。实用的布局范围为三至六个或更多车轮,通常都是用于在最大牵引力上驱动经常滑管壁。
理论上,爬上一个管道用尽可能少的驱动器和被动弹簧接头。图8-3显示了所需的移动立式管道最简单的布局。这设计可以很容易地得到被困或无法通过管倒接头处,甚至可以是通过管壁上的大畸形。
下一个最好的布局增加四分之一轮。这布局是更强大的,但有些情况下某些类型的管和管配件也可能被困,参见图8-4。自由的中心线性度使车辆保持在一个管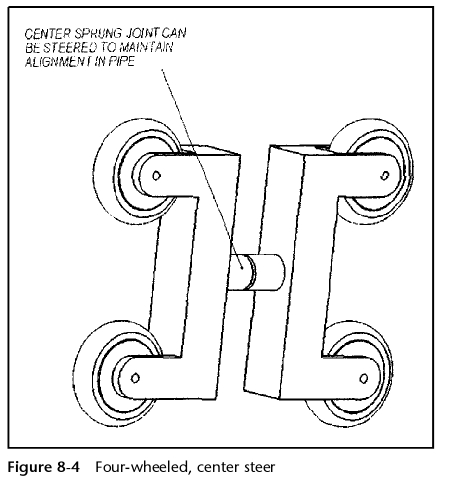
履带爬虫
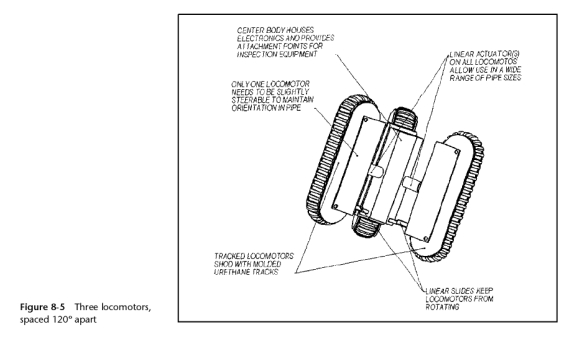
轮式履带在工作以及在许多情况下,轨道提供一定的优势。这种较低的压力往往刮管少。分散开的推动自发段墙边机制的力量也意味着径向力本身可以很高,大大提高了车辆的滑移阻力。图8-5 显示了非常常见的三种运动跟踪的管道爬行器。
其他管道爬行机器人
对于管道不能承受较高的内部力量,另一种方法是必须进一步蔓延履带的力量在更大的区域。已有开发了至少两个概念。一个使用气球,另一线性延伸的腿。第一个是一个独特的概念,采用气囊(气球)上最后一个线性致动器,这是利用充满空气或液体的扩展推动了对管壁。获得大的力量对管壁的摩擦力,产生高的转向,如果需要的话,通过旋转之间的耦合的实现这两个部分。
这种耦合的爬行段,和向前的运动在整个车辆通过收缩气囊前完成,推进,
扩大,收缩后段,拉到前部,扩展它,然后重复整个过程。行程是缓慢的,但这个概念没有很好地应对障碍或尖锐的棱角,但有对管壁上非常低的压力的优点,可能需要采用这种设计。采用这一设计提出了在航天飞机的柔性纤维管左右移动的一个概念。
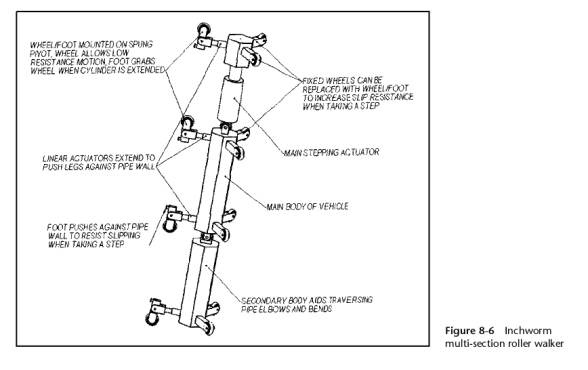
另一个爬行式管道爬行器有一个看似复杂的形状,但这个形状有某些独特的优点。在大的管道核反应堆蒸汽管从内置管内壁近管道的中心延伸的传感器。这些传感器的井是由相同的材料构成的管,通常是一种高档不锈钢,但不能被机器人刮掉。机器人必须具有一个形状可以绕过这些突起。尺蠖运动车包括三个部分,每个部分带有可延伸腿,提供了极大的流动性和可变几何解决这些障碍。图8-6示出了这种概念的一个最小的布局。
外管的车辆
也有一些应用,需要在车辆沿着管的外侧移动,以消除不必要的或杜绝危险,或从一个管移动到另一个处理中的杂乱的管道。CMU系统的拆除石棉外管的学步车,BOA,就是这样一个车辆。虽然根据这本书的定义它不是机器人,但它仍然是值得包括在内,因为它显示了真正的机器人广泛的移动系统,最终可能不得不在意想不到的环境中移动。BOA是一个框架学步车。是通过移动和一套夹具夹紧管道来运动,延长另一组在管前,和与第二组夹具夹住管。
RedZone Robotics'Tarzan,,一个在罐立式垂直管步行臂,是一个非常不寻常的概念,提出了一个在装满油的管道里面走动概念。这辆车是类似于国际空间站维修臂,它从一个管道移动到另一个管道上,不像ISS臂,Tarzan必须在重力下工作。由于Tarzan不是自主的,它使用系绳获得从罐外电源和控制信号。手臂是全液压,利用旋转执行器和气缸。总之,有
18个驱动器。试想一下,一个在手臂的系绳管理18个复杂性的控制执行器,完全走出在一个充满的管槽!
蛇形的
在自然界中,有一类动物,左右移动的蠕动。这已被应用于机器人的一个小小的成功,尤其是那些为了在所有三维移动。按定义,蠕动需要许多致动器,柔性构件,和/或巧妙的机制耦合段。的优点是,机器人的横截面非常小,允许它适应十分复杂的环境,推进本身推动的东西。缺点是,致动器的数量和高移动零件计数。
还有许多其他不同寻常的运动方法,还有更多正在开发迅速发展的移动机器人领域。该鼓励读者在网络上搜索,了解更多的这些不同,并有时奇怪的解决方案,以走动在罕见的环境中,如内,外管,内底的问题储罐,甚至,最终,人体内部。
第9章比较运动方法
什么是流动性?
现在我们已经看到了很多方法,机制和环境中动来动去的机械联系,让我们讨论如何对它们进行比较。一套标准化的参数是必需的,但是这对比意味着我们必须先回答这个问题:什么是流动性?它可以定义是由有多大的障碍的移动系统,或者是它可以如何爬陡峭的斜坡?也许它是多么好,或者,它如何爬上楼梯?有多深沼泽它可以打通,或有多宽裂隙它可以遍历?是方程速度一部分?
答案似乎是所有这些事情,而我们如何能比较一个独立的柴油40吨推土机和一个苏打罐的大小的双“A”电池供电抛出两轮尾牵引机机器人的流动性?这似乎是不可能。需要有一些方法甚至比赛场地是有效的流动系统,无论其大小的比较。在这一章,我们会探讨移动系统的几种比较方法从一个描述流动性方面的详细讨论系统本身。然后,许多流动性挑战的室外环境提出了将被调查。一组流动性指标,会提供一个一目了然的比较,并提出了切实可行的具体案例比较的方法,且将被讨论。
移动系统
在公平的竞争环境中,,移动系统所比较,进行调整以得到有效的大小相同。这意味着需要有大小的明确定义。由于大多数机器人采用电池供电,能源效率也必须被包括在比较内,因为那里具有剪切力来克服一些障碍,电池动力车根本就没有。这有限的可用功率,大多数情况下,也限制了速度。在某些情况下,可以帮助简单地将一个障碍快速克服。为简单起见,因为电池驱动的机器人的相对较低的最高时速,前进的动力不包括在本书中移动性的方法比较。
最后一个有趣的标准,值得一提的是车辆的形状。这似乎是没有什么关系的流动性,而事实上在大多数情况下并非如此,然而,对于环境拥挤,无法驱动越过障碍,在那里避过障碍物是继续的唯一途径,圆形或圆形的形状更容易操纵。圆形允许车辆在原地转,即使它是面对树干或墙壁。这种能力并不存在那些非圆形车辆。该非圆形型车可以停留在一个死胡同,它试图转身。对于大多数的室外环境,有些简单的圆角足够援助流动。在某些环境中(很茂密的森林,或在建筑物内)全圆的形状都是有利的。
尺寸
总长度和高度的流动制度直接影响车辆的克服的障碍物的能力,但宽度影响不大,那么尺寸,至少是大部分的长度和高度影响。整个长度的乘积和海拔高度,面积,似乎给这部分良好的估计其大小,但还需要更多的信息,该系统能够准确把它给别人。三维,宽度似乎是一个重要的大小特征,因为较窄的车辆有可能通过较小的开口或在一个较窄的小巷转身。但是,是一个更好的参数比较流动制度的宽度。
一些障碍,更高的足以进行谈判。为其他障碍,较长的工作。一个简单的方法来比较这两个参数将是有益的。一个长度/高度比、标高会是有用的,因为它减少了两个参数到一个。长度/高度比介绍了适合系统的一目了然的想法,面对的环境,主要是颠簸或一个步骤这主要是隧道和低通道。
宽度对获得超过或避过障碍物的影响不大,但它确实影响转弯半径。它主要是独立于其它尺寸的参数,由于宽度可以扩展,以增加可用容积,机器人在不影响机器人的超过或避过障碍能力。由于在转弯的地方是更关键的流动特征与宽度,右维使用的是系统的对角线长度。这是通过转动所需的宽度由环境制约所确定的预期最低设置。但是,有必要使机器人有更广泛的其他原因,如简单地增加机器人的体积。经验法则计算出机器人的宽度时使用的是机器人约62%的长度。
每个系统的组件都有自己的体积,并且可移动部件扫出一个有时较大体积。这些组件机器人为独立于机器人的功能,但占用体积。包括移动系统部分的体积是有益的。如稍后看到的,重量是至关重要的,所以组件需要被包括在移动性系统的总质量内。由于质量直接关系(约,因为材料具有不同的体积密度)给定的一部分,和体积更容易计算和可视化,体积否定了任何需要包括质量。
效率
另一个好的经验法则是,任何机械设计时在结构上减少体重和运动部件总是好的。这条规则适用于移动车辆。如果没有重量的限制或没有大小限制,那么大,因此较重的车轮,轨道,或腿会让车辆得到更多的障碍。然而,重量重要的有几个原因。
*车辆可以更容易运输。
*它需要较少的自身力量在困难的地形,尤其是在倾斜面。
*维护需要举升车辆是更容易执行且不危险。
*该车辆的人在其工作区危险性较小。
出于所有这些原因,更小,更轻的悬架和传动系统组件通常用于高流动性的车辆是更好的选择。
有三种机器人移动:前/后,转,和上/下,每种都需要一定量的功率。三个标准轴的坐标系统被标记的X,Y,和Z,但这是因为大多数移动机器人的转向前修改侧向移动。机器人的运动通常被定义为横向,反过来,攀登。一个机器人可以做的任何一个,两个,或三个在同一时间,但每个功率的要求是不同的,他们可以很容易地上自主幅度。登山用最大功率和转到的地方,通常比向前或向后运动需要更多的功率。这并不适用于所有的移动系统,而且是一个很好的一般规则。
环境
在相对良性的室内环境的移动是一个简单的物质,除了与楼梯。本书在系统主要集中在设计的不可预知和高度不同的系统室外环境,其包括大的变化的环境温度,地面覆盖,地形和障碍。这种环境是如此不同,只有一小部分的问题可以上市,或比较的参数的数量会变得太大。
热与冷似乎是不相关的流动性,但它们在移动系统必须是有效的,它不产生过多的热量和本身损坏或附近的沙漠中的运行时组件。流动系统必须不能冻结或堵塞的冰,松散的雪或冻雨在操作时。作为地面覆盖,移动系统可能要处理松散的干砂,会迅速磨损轴承,或在泥泞的水里操作。它也可能有处理问题的地形像陡峭的山坡,看似不可逾越的鸿沟,几乎垂直的峭壁,溪流,河流,沼泽,或小。移动系统几乎肯定需要移动的部分或全部这些地形的挑战。此外,也有较明显的障碍,像石头,木头,障碍,坑坑洼洼的,随机的颠簸,石头或混凝土墙,铁轨,上下楼梯,高湿草,和站在茂密的森林和树木。
这意味着,移动性系统的有效性,应使用上述的参数进行评价。它是怎样处理沙子或鹅卵石?是它的设计本来就很难密封抗水?如何
陡峭的斜面可以将它进行谈判?有多高的障碍,步骤或凸起可以将它克服或做到?它有多宽鸿沟可以跨越?不知怎样,所有这些需要被简化以减少各种各样下降到一个可管理的几个。
四类温度,地面覆盖,地形,以及障碍既可以定义清楚或分解成更小,更简单地定义子类没有结束与一个无法控制的大名单。让我们来更详细看看每一个。
温度
温度可以简单地被分为两个极端的热和寒冷。热涉及到效率。一个更有效的机器将有较少的在炎热的气候问题,但更好的效率,更重要的是,电池供电的机器人将运行的时间更长。冷涉及掐点,这可以收集冰雪,造成干扰或拖延。一个有用的温度相关的术语来思考在成对比较移动系统的效率和夹点。
地面覆盖
地面覆盖物更难以定义,尤其是在砂的情况下,因为它不能进行缩放。沙子就是沙子不管什么大小车辆(除当然微型机器人),和泥依然是泥。驾驶在砂子或泥土后。将地面压力的函数,最大迫使车辆可以在一个轮子,轨道,或脚,由区域划分施加该支撑元件放置在地面上。降低接地比压减小了驱动元件下沉量,从而降低了动力来移动该元素所需的量。地势较高压力是有帮助的只有两种情况:牵引机器人背后沉重负荷,攀登陡峭的山坡。
机器人不常需要拖车,但是随着各种任务这可能会改变,他们会被放入加宽。爬山,虽然是一个共同任务。地面压力对爬坡效果还可以克服了详细的胎面设计(移动系统的独立的),它结合了前高后低接地比压的好处牵引。较低的地面压力,应考虑以指示更多的可移动系统。
该理论认为,砂和泥浆是不可伸缩的,不能施加到草,然而,因为高场草确实显著比短草坪草较大。草,似乎是良性的,但它是足够强大时,揉成抛出轨道,搪塞轮式车辆,和跳闸步行者。这些问题可以从一个打火机大致与地面压力,压系统往往会骑在高潮湿的草地,降低其缠绕的问题。引起的草的问题,那么,可以假定有效地覆盖地面压力类。
地形
地形可以扩展到任何大小使得它非常简单,包括可以通过斜坡的角度来定义。斜率的角度考虑问题,虽然,它可以是该材料摩擦更多的功能和任何与地面接触的胎面形状,比该移动系统的几何结构的一个函数。还有一些几何形状是更容易在陡峭的山坡上控制,也有一些散步,登山,那可以爬上斜坡,一个轮式或履带式车辆根本不起来。因此面对坡角是很重要的,但它应当假设在地面接触的材料是相同的,不管在什么类型的移动系统中使用。
障碍
障碍也可以按比例缩放,但他们创造一个特殊的情况。流动系统的有效性可以通过完全判断如何高,相对于它的海拔地区,它可以谈判的障碍。障碍谈判是要更复杂一些,但是它可以简化分为三类。
*移动系统的整体高度流通的障碍高度
*系统长度可转让的障碍高度
*系统海拔地区可转让的障碍高度
比较障碍参数可以被定义为高度,一种四方步系统可以爬上淋上一个正方形的高度墙系统能够翻越没有高定心,或以其他方式被卡住。
一个倒置的障碍,一道鸿沟,也是很重要的。可转让的鸿沟宽度是大多的移动性系统的长度的函数,但有些巧妙的设计可以改变它们的长度,或转移其中心重力,便于穿越宽的裂痕。对于可以变化的系统它们的长度,可转让鸿沟的宽度应使用系统的最短总长度进行比较。对那些已被固定时,使用整体长度。
越障的另一面是转弯宽度。因为移动性系统具有小转弯半径,要能够摆脱周围的情况可能性更大。谈到宽度,车辆宽度不与函数直接有关,但是定义为车辆可以掉头最窄小巷。这是相对于额定值,一些制造商,让转弯半径为a给定的定义为从转折点到圆的中心的距离。这可能会产生误导,因为一个非常大的车辆,绕其中心转动,可以说有一个零半径转弯宽度。
转向能力的参数也必须显示车辆可紧转身后,给一些想法以及它如何能在密集的树木森林里运动。然后还有,两个宽度参数,小巷宽度和转身后的宽度。
复杂性
一个较为模糊的比较标准,必须包含在任何实际的机械装置的评价是其固有的复杂性。一个衡量复杂性常用的方法是计算移动部件或接头的数量。滚珠或滚子轴承通常算作一个部分,一个联合虽然有可能是滚珠或滚子内移动10秒的轴承。这种方法的一个问题是,一些地方虽然移动了,对他们的力量很小或在一个相对无危险的操作的环境中,因此,持续很长的时间,有时甚至超过在同一系统中移动的部分。
第二种方法是计算的致动器的数目,因为它们的数目涉及运动部件的数量,它们通常是最大的磨损的源头。这种方法的缺点是它忽略被动运动部件之间的联系,可能会引起问题或磨损在一个主动驱动部分。第一种方法可能是一个更好的选择,因为机器人有可能在完全不可预知的环境中进行移动和任何移动部分同样容易受到环境的损害。
速度和成本
有两个其他的比较参数可以包括在一个流动性方法的比较。它们是运动系统移动车辆的速度和成本。移动速度过快,在不可预知的地方悬挂大型和复杂载荷系统。这些负载是很难精确计算,因为地形是如此不可预测的。功能强大的计算机模拟程序可以预测具有中等程度的悬挂系统性能的准确性,但车辆用悬架系统仍然必须在真实的世界测试。通常情况下,模拟程序预测被证实有显著程度的不准确性。它的准确预测是非常困难的,设计时速不远的一个特定水平的性能八米/秒,具有任何有用的意义。它是假定放缓一个可以接受的方式来增加流动性,并减缓可以做任何悬架设计。流动性没有被定义在一定的速度障碍下;它是简单的在任何转速工作下的障碍。
成本可以与尺寸,重量,和复杂性。较少的,较小的,轻的零件通常比较便宜。设计时间去满足条件的最简单,最轻的设计符合标准可能会更长,但最终成本通常会减少。由于成本的大小,重量,和复杂度密切相关,它不需要被包括在悬挂和传动方法的比较。
移动性索引方法的比较
另外,也许更简单的方法是创建流动性指标,列为一组相关系统流动性比率的设计能力,长度,宽度,高度,和可能的复杂性,一小部分的地形参数。最有用的设置似乎是车辆可以障碍物高度,裂缝宽度,和狭窄的小巷中转身得程度。计算车辆的地面压力将覆盖在流动性砂或泥。相关比率会:
*步骤/海拔地区:台阶高度除以标高移动系统的面积
*步骤/系统高度:可转让最高的墙壁或平台,取较短,除以移动系统高度
*决口/系统长度:裂缝宽度除以车辆长度(在可变几何形状的车辆的情况下,最短的该移动系统的长度)
*系统宽/车削直径:整车宽度除以最外层转弯圆直径
*系统宽/校正后系统车辆宽度:车宽划分由路径的宽和它转身的时候的宽
*接地压力
这些都是建立这样一个更高的比数是指理论上较高的流动性。毫无疑问,一些移动系统的设计具有非常高的指标在某些类别,和在其他低指数。每个移动系统的设计有一个单一的流动性指数很方便,但很难产生一个有用的描述该系统有足够的细节的能力。以上六点,然而,应比较完整的一目了然的设计,以及设计在很多情况下会如何执行。
