������
ʹ��ģ��ƥ���˲��ӵ�Ŀͼ��ȷ�ؽ�����ά��̬ʶ��
����Kenia Picos a ; Victor H. Diaz-Ramirez a ; Vitaly Kober b��c ; Antonio S. Montemayor d ; Juan J. Pantrigo d
���ߵ�λ a Instituto Polit��cnico Nacional�CCITEDI, Instituto Polit��cnico Nacional 1310,Mesa de Otay��Tijuana B.C. 22435��Mexico
b CICESE, Department of Computer Science, Carretera Ensenada-Tijuana 3918,Ensenada B.C. 22860, Mexico
c Chelyabinsk State University, Department of Mathematics, 129 Bratiev Kashirinikh, 454001, Russia
d Universidad Rey Juan Carlos, Calle Tulip��n S/N 28933 M��stoles, Madrid, Spain
��ϵ��ʽkpicos@citedi.mx
ժҪ�����������һ�־�ȷ�ĸ�����ά(3D)��̬ʶ���㷨�����㷨��������Ӧģ��ƥ���˲��;ֲ������Ż���������ͼ��ʱ������һ������˲������ҳ������е�Ŀ��ĵ�ǰ��ͼ��ͨ�������ͼ��ѧ�ϳɵ�Ŀ��ͼ��֮�����Ѷ�Ӧ��ϵ���ϳ�ͼ����ʹ��Ŀ�����֪3Dģ�ͺͻ��ڱ��������ĵ������̴����ġ����������Ӳ��������ڵ�����£����ø��㷨���������ʵ�����л�ü����������������̬ʶ�ȷ�����������ۡ�
�ؼ��ʣ���ά��̬����; ģ��ƥ�������; ��ά����ʶ��
Ŀ¼
������
1 ��������
2 ����ģ��ƥ���˲���Ŀ��ʶ��
2.1Ŀ��ʶ����ģ��ƥ���˲�
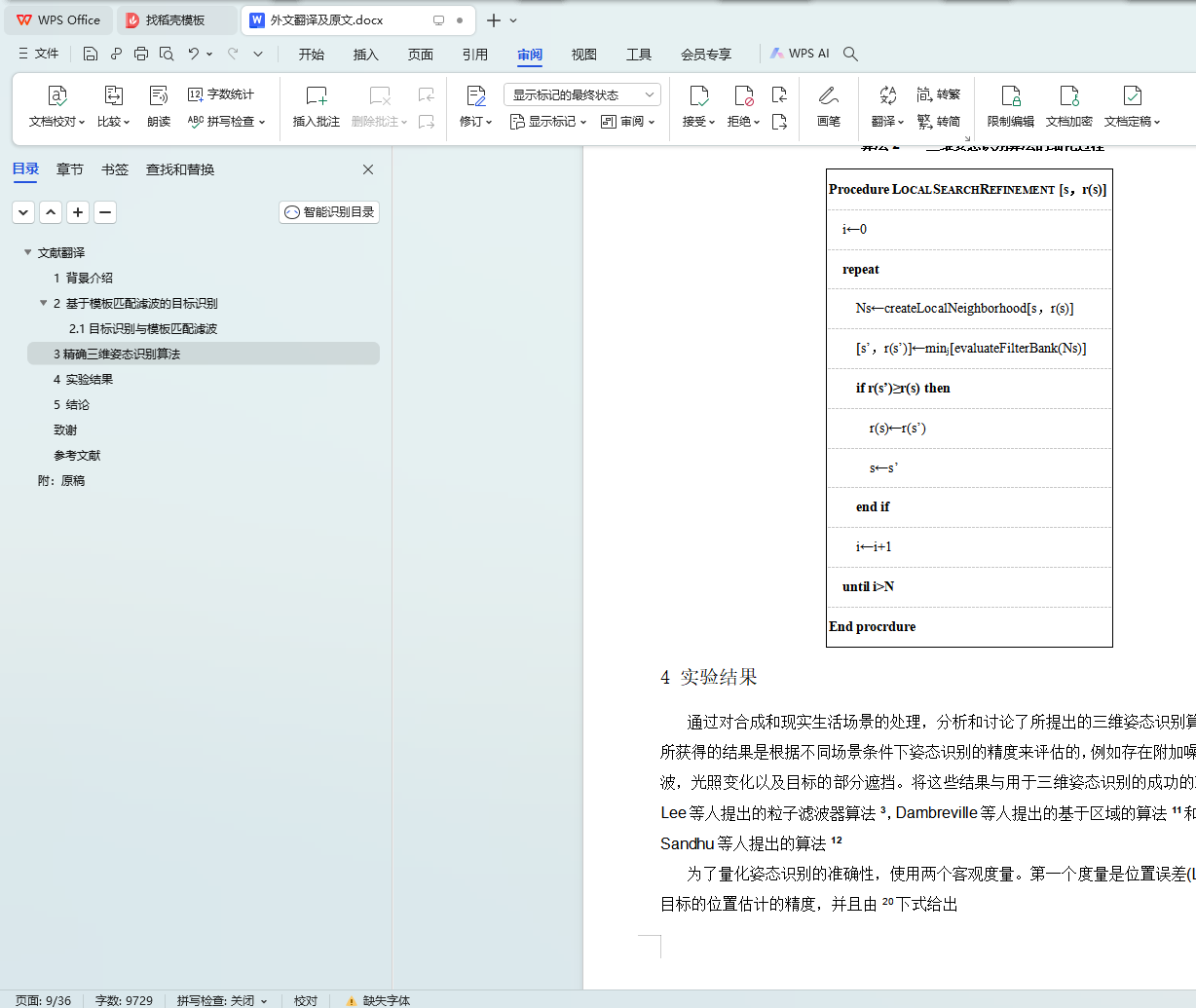
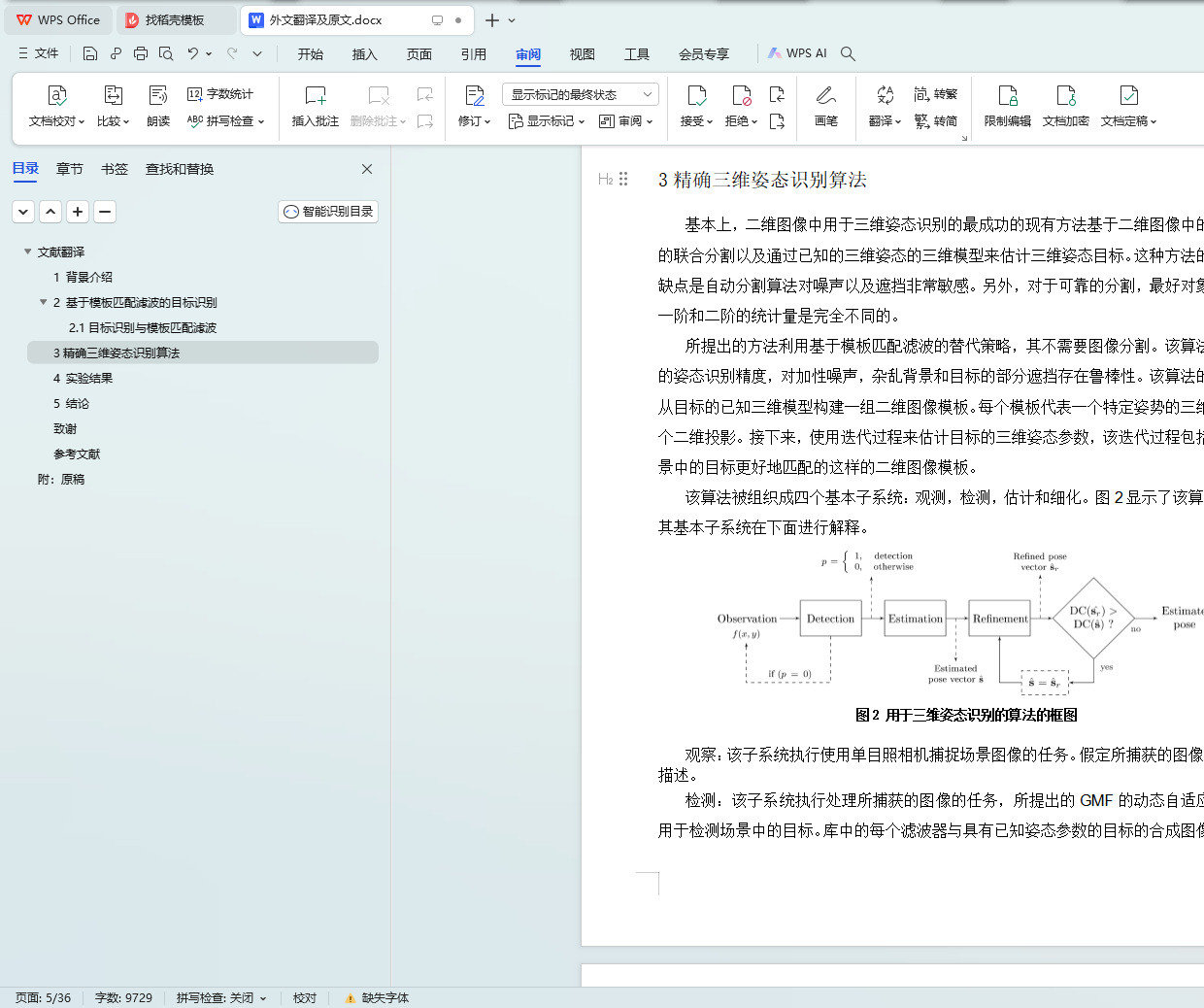
3��ȷ��ά��̬ʶ���㷨
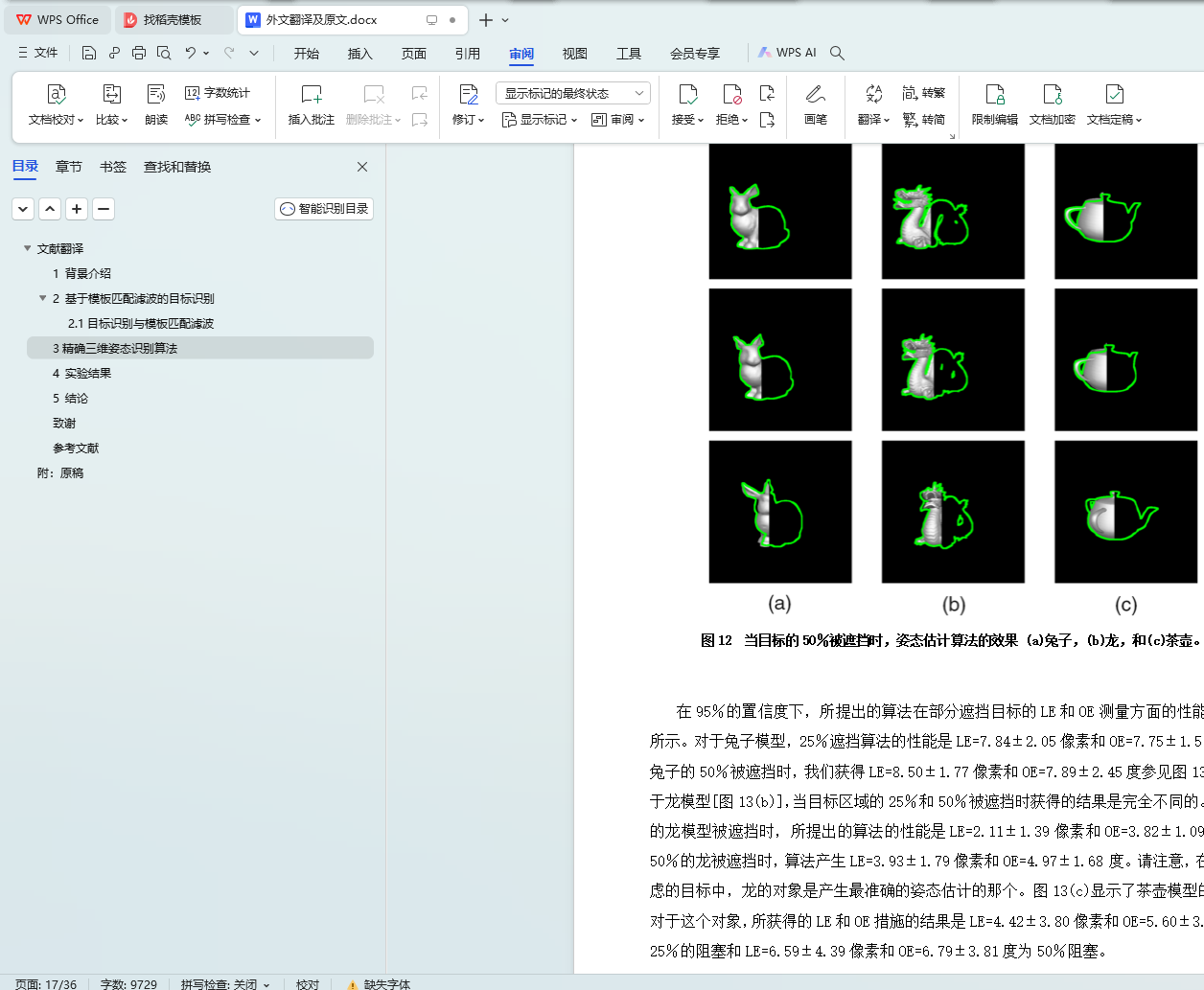
4 ʵ����
5 ����
��л
�����
����ԭ��
1 ��������
Ŀǰ������������ˣ��˻������������������ʵӦ���У���Ҫ����ά(3-D)�ռ����Զ�ʶ��������̬������1��̬ʶ�����ͨ�������۲쳡���Ķ�ά(2-D)ͼ��ͶӰ������Ŀ��ļ���������������λ������ͷ�λ�ǣ���Ŀ�걻Ƕ�뵽3-D�ռ��С���ά��̬ʶ���������Խ������Ϊ��ά�ռ��е�Ŀ����̬�������Ŷ�����ɶȶ��仯��2,3���⣬Ŀ���ڳ����е���ۿ������ڶ������ض����ͣ����������ͱ����Ӳ��Ĵ��ڣ������Դ��Ӱ���Լ�Ŀ��IJ����ڵ��ȵȡ�4-6
���Ʋ������ض���ϵ��¹۲쳡���е�Ŀ��Ķ�����ͼ����ˣ�ͨ���۲쳡����ͼ�����̬�����������ռ�����Ǿ�ġ���ˣ���Ҫͨ�����������Ķ�άͼ���пɽ��ܵļ��㸴�Ӷ��������������ά�ռ��о�ȷ����Ŀ����̬�����㷨��
����������̬�����Ѿ�ͨ����ͬ�ķ�������������磬ͨ���ҵ��ӹ۲쳡��(���磬��������״����Ȥ��)��ȡ���ض�ͼ����������֪����άģ�͵Ķ�άͼ��ͶӰ������֮������ƥ�䣬Ŀ�������֪����̬������7��8���ַ����ѱ�֤���dzɹ�������Ӧ���С�9Ȼ���������������ӵ������ͱ����Ӳ���������ȡ�㷨�����������ϲ����ˣ����õ�����̬���ƿ��ܲ�ȷ��
��һ����Ч����ά��̬ʶ�������϶�ά�ָ����̬���Ƽ�����10�ڸ���У����ǵ�Ŀ��������Ŀ��������������֪��̬������Ŀ��ĸ���3-dģ�͵�2-d��ͼ��ͶӰ��ƥ���ڹ۲�ij�����11���ּ����ǿ��ٺ�����������£����������õ�Ч����Ȼ�������ַ���������ǿ��������ѡ��ķָ����Ч�ʡ����⣬���ڽ�ʹ�ó�����Ŀ���������������άĿ����̬�Ĺ��ƣ����Զ���������ɫ��ǿ�ȷֲ���������Ŀ���������Ϣ��Sandhu���� 12������һ�ֻ������Ϸָ����̬���Ƽ�������ά��̬ʶ�����Ч�������÷���ͨ���������ͬһ��Ŀ�����ά����ģ�͵Ŀ��ü��ϵ���Ϣ���Ż����ڹ�����̬������Ŀ��IJο���άģ�͡�
��ģʽʶ����������˲�2���������Һ����ӵij�����ִ��Ŀ���������������ѡ�����ֹ��˰���һ��ģ��ƥ������������е�Ŀ��Ŀɿ����;�ȷ������λ�����ꡣ13��14����˲����������õ���ѧ���������ң����Ǽȿ����ڻ�Ϲ�����ִ�������ʵ�֣�Ҳ�����Ը����������ֿɱ���豸��ʵ�֡�����˲���������������ƽ���е����ǿ��ֵ�������dz����е�Ŀ�������Ĺ��Ƶ�����ϵͳ��������Ƶ�����������ʶ������ض����Ƶij����е�Ŀ����ض���ͼ�����⣬�ڿ�����ģʽʶ��Ӧ���У��������˲�������ʶ��Ŀ��Ķ����ͼ��15����������£���̬ʶ���������ͨ�����������������˲�������̬������������������е��˾���Ŀ�����̬�����غ�ʱ���˾����ܹ����˾�����в�����ƥ�������