x; margin-bottom: 0px; -ms-text-justify: inter-ideograph;">ar[i]=ar[i]*tyr[i]/(n*m);
swr+=ar[i];
ah[i]=ah[i]*tyh[i]/(n*m);
swh+=ah[i];
} //�����������ƽ����
for(i=1;i<=ty;++i)
{
ar[i]=0;
ah[i]=0;
for(k=0;k<3;++k)
{
ar[i]+=(pr[i][k]-zr[k])*(pr[i][k]-zr[k]);
ah[i]+=(ph[i][k]-zr[k])*(ph[i][k]-zr[k]);
}
ar[i]=ar[i]*tyr[i]/(n*m);
sbr+=ar[i];
ah[i]=ah[i]*tyh[i]/(n*m);
sbh+=ah[i];
} // ����������ƽ����
std::cout<<swr<<" "<<sbr<<" "<<swh<<" "<<sbh<<std::endl;
double l1,l2;
l1=swr/sbr;
l2=swh/sbh;
std::cout<<l1<<" "<<l2<<std::endl;
if(l1<l2)
std::cout<<"rgb"<<std::endl;
if(l1>l2)
std::cout<<"hsi"<<std::endl;
if(l1==l2)
std::cout<<"same"<<std::endl;
return 0;
}
�������ռ��µ�ͼ��ָ������1��
��3�����ݱ�1�����ݣ�Ϊ�˽�һ������RGB��HSI������Jֵ֮���Ƿ�����������죬����SAS���������˷���������������2��
��4���ɱ�1�����ݿ�֪����18��ͼ����RGB�ռ��Jֵ����HSI�ռ��С����ֻ������ͼ����HSI�ռ��µ�Jֵ�Ƚ�С�����巴ӳ���÷�ˮ��ָ����ͼ����зָ�ʱ����RGB�ռ��µķָ�Ч������HSI�ռ��µķָ�Ч���á��ɱ�2��֪�����ֿռ��µ�����ˮƽΪ0.1797,�����ֿռ��µķָ�Ч����0.1ˮƽ�²�������
��1 ��RGB��HSI���ֲ�ɫ�ռ���ͼ��ָ����Ƚ�
|
ͼ��
|
RGB�ռ��µ�Jֵ
|
HIS�ռ��µ�Jֵ
|
��Сֵ�ռ�
|
|
 A1 A1
|
899.74
|
2726.11
|
RGB
|
|
A2
|
415.577
|
1836.71
|
RGB
|
|
A3
|
2696.58
|
4739.84
|
RGB
|
|
A4
|
686.539
|
3322.8
|
RGB
|
|
A5
|
1112
|
6232.88
|
RGB
|
|
A6
|
632.906
|
1497.56
|
RGB
|
|
A7
|
1041.83
|
5123.44
|
RGB
|
|
A8
|
1989.86
|
5442.8
|
RGB
|
|
A9
|
521.341
|
1398.25
|
RGB
|
|
A10
|
15618
|
23701.5
|
RGB
|
|
A11
|
5457.86
|
10358.7
|
RGB
|
|
A12
|
33176.3
|
33289.4
|
RGB
|
|
A13
|
3087.05
|
17944.9
|
RGB
|
|
A14
|
1173.95
|
2827.46
|
RGB
|
|
A15
|
23275.9
|
22187.2
|
HSI
|
|
A16
|
4944.31
|
3725.62
|
HSI
|
|
A17
|
173.097
|
7663.73
|
RGB
|
|
A18
|
11584.2
|
327399
|
RGB
|
|
A19
|
5034.56
|
22330.3
|
RGB
|
|
A20
|
4419.34
|
56467.6
|
RGB
|
��2 ���ֿռ䷽����������
|
T-Tests
|
|
Variable
|
Method
|
Variances
|
DF
|
t value
|
Pr>|t|
|
|
 VALUE VALUE
|
Pooled
|
Equal
|
38
|
-1.37
|
0.1797
|
|
VALUE
|
Satterthwaite
|
Unequal
|
19.6
|
-1.37
|
0.1871
|
6 �ܽ�
ͼ��ָ���ͼ�����ͷ����Ĺؼ����裬��ͼ����ռ����Ҫ��λ�á�����Ϊֹ�������Ѿ��кܶྭ��ķָ��㷨��������Ȼû��һ�ַָ���ܹ������е�ͼ��������ķָ����������ݴ��ָ�ͼ��IJ�ͬ�ص㣬�����֪������֪ʶ���о����Ͼ���ͼ�����Եķָ�ģ�ͣ��������ͼ��ָ����Ҫ�ֶΡ�
�����о�����Ҫ��������һ�̶ֹ��ķָ������RGB��HSI��ɫ�ռ��µ�ͼ����зָȻ�������ж����Ƚϡ�����ʱ��Ĺ�ϵ��ֻ��������о���Ҫ���о����Ͼ���ͼ�����Եķָ�ģ�ͣ����д����Ĺ���Ҫ����
��1�� ����ֻ����һ�̶ֹ���ͼ��ָ��������ˮ��ָ������ʵ�����к�
��ķָ������Щ�ָ����Ҫһһȥ����
��2�� ��ɫ�ռ�����⣬����ֻ��RGB��HSI���ֿռ�����˱Ƚϣ���ʵ���в�
ɫ�ռ�Ҳ�кܶ࣬��Ҫ������֮�䶼��һ���Ƚϡ�
��3�����۷�����ѡ�������˷�������ķ�������������������۷������á�
�� л
���о�����ָ����ʦ**���ڵ�Ϥ��ָ������ɵģ����ĵĸ�л�ҵ�ָ����ʦ�����������߽���ͼ�����Ĵ��ţ�ָ����ʦ��Ծ��ѧ��˼ά��һ˿��������ѧ̬�Ⱥ����ʿ�ѧ�߷����־��Ϊ�������˹�Եİ������ڴ�����ʦ��ʾ��ֿ�ĸ�л�ͳ�ߵľ��⣡
��л���й��ġ�������֧���ҵ�ͬѧ����ʦ��
�� �� �� ��
1 ������.����ͼ����ѧ[M].���������ӹ�ҵ�����磬2001
2 Pitas I. Digital image processing algorithms and applications[M]. New York: Prentice
Hall, 1993
3 ��ع����ͼ��ָ�[M]����������ѧ�����磬2001
4 ������. ͼ��ָ��̽��[J]. ����ũѧԺѧ����2001��Vol.8(11):1534��1538
5 ��С�������������ڷ�ˮ��任��Ŀ��ͼ��ķָ����������[J]����������̣�2006��
Vol.32(5):181��185
6 Schettini R. A segmentation algorithm for color images[J]. Pattern Recognition Letters,
1993, Vol.14(9)��495��499
7 �����㣬֣�壮���ڲ�ɫͼ��������̬ѧ���ӵ��о�[J]���й�ͼ��ͼ��ѧ����2000��
Vol.5(A)��293��299
8 ����ͣ������壬��ɿ£�ͼ��ָ��������۷����о�[J]���й�ͼ��ͼ��ѧ����2000��Vol.5(12)��
38��43
,
ժ Ҫ
ͼ��ָ���ͼ�����е�һ��ؼ���������Ŀ���ǽ�Ŀ��ͱ������룬Ϊ���������ṩ���ݣ�����ֱ��Ӱ�쵽������Ϣ�������̡�Ȼ����ĿǰΪֹ����ͼ��ָ��Ч���û�����û��һ��ͳһ�������ж���ͬ�ķָ����ͬһ��ͼ��ķָ�Ч���Dz�ͬ�ģ�����ͬһ�ַָ����һ��ͼ���ڲ�ͬ�ռ��µķָ�Ч��Ҳ�Dz�ͬ�ġ��о��Ƚ�ͬһ�ַָ���ڲ�ͬ��ɫ�ռ�ķָ�Ч����������ġ�
��ˮ�루Watershed���任��һ����ѧ��̬ѧͼ��ָ���������Եõ���ȷ�ı�Ե������������ա������ؿ��ı�Ե������������Ҫȱ����Ƕ�����ʮ�����У������������ͻ�������صĹ��ָ�������ʹ�ָ������ִ�������ɢ����
��������ʵ��ķ��������÷�ˮ�뷽���ֱ���RGB��HSI�ռ��·ָ�һ��ͼ��Ȼ�����Ч�����ж����Ƚϣ��Ӷ�ȷ��һ�ַָ�Ч���ϺõIJ�ɫ�ռ䡣
�ؼ��ʣ�ͼ��ָ� ��ˮ���㷨 ��ɫ�ռ� ��������
Abstract
Image segmentation is a key technology of image processing, and its purpose is to separate the target from the background. It makes further image analysis and comprehension possible. But so far, there is not a unified evaluation criterion about the effects of image segmentation. The effects of segmentation are different with different segmentation methods, and the effects are also different with a given segmentation method at different color spaces. It is significant to compare the effects of different color space segmented by a given method.
The watershed is an image segmentation method based on mathematical morphology. It gets the precise edge which is continuous, closed and single-pixel. The main limitation of watershed transform is the over-segmentation due to its sensitivity to noise; even the very thin noise will lead to a lot of scattered and meaningless regions.
In this paper, we use the experiment methods, apply the watershed methods to segment an image in the RGB and HSI color space respectively, then quantitative comparison for the effects of them is given, and conclude a better color space of the effects.
Key words ��Image segmentation, Watershed methods, Color space, Quantitative evaluation
Ŀ ¼
1 ����
2 ͼ��ָ����
2��1 ����ͼ��������
2��2 ͼ��ָ�
2��2��1 ͼ��ָ��о���״
2��2��2 ���ڵ�����
2��2��3 �����������
3 ��ɫ�ռ�
3��1 ��ɫ�ռ����
3��2 ���ֲ�ɫ�ռ�
3��2��1 RGB��ɫ�ռ�
3��2��2 HSI ��ɫģ��
3��2��3 CMY��ɫ�ռ�
3��2��4 YIQɫ�ʿռ�
3��2��5 YUVɫ�ʿռ�
3��2��6 YCrCbɫ�ʿռ�
3��3 RGB��HSI���ת��
4 ͼ��ָ��
4��1 �Ҷ���ֵ�ָ
4��2 ��Ե���ָ
4��3 ������ٷָ
4��4 ��������ͱ߽�ķָ��
5 ͼ��ָ�Ч������
5��1 ��ˮ��ָ��㷨
5��2 �������
5��3 ʵ�����
6 �ܽ�
��л
�����
1 ����
��ͼ����о���Ӧ�ù����У������������Ը���ͼ���е�ijЩ���ָ���Ȥ����Щ���ֳ���ΪĿ���ǰ��������һ���Ӧͼ�����ض��ľ��ж������ʵ�����Ϊ�˱��ͷ���Ŀ�꣬��Ҫ����Щ���������ȡ�������ڴ˻����ϲ��п��ܶ�Ŀ���һ�����á�ͼ��ָ���ǽ�ͼ��ֳɸ������Ե�������ȡ������Ȥ��Ŀ��ļ������̡� �ڽ���ͼ��ָ�ʱ������Ҫ����Ŀ��ͱ���������֪ʶ����ͼ���е�Ŀ�ꡢ�������б�ǡ���λ��Ȼ�ȴ�ʶ���Ŀ��ӱ����з��������
ͼ��ָ�����ͼ��������ͼ������Ĺؼ����裬Ҳ��һ�ֻ����ļ�����Ӿ�������������Ϊͼ��ķָĿ��ķ��롢��������ȡ�Ͳ����IJ�����ԭʼ��ͼ��ת��Ϊ����������յ���ʽ��ʹ�ø��߲�ķ����������Ϊ���ܡ���ˣ�ͼ��ָ������һֱ�õ����ǵĸ߶����ӡ�
Ȼ����ĿǰΪֹ����ͼ��ָ��Ч���û�����ȷ���û��һ��ͳһ�������ж���ͬ�ķָ����ͬһ��ͼ��ķָ�Ч���Dz�ͬ�ģ�����ͬһ�ַָ����һ��ͼ���ڲ�ͬ�ռ��µķָ�Ч��Ҳ�Dz�ͬ�ġ�
�����о��ľ���һ��ͼ��ָ����һ��ͼ����RGB��HSI���ֿռ��µķָ�Ч���Ķ����Ƚϡ�
2 ͼ��ָ����
2��1 ����ͼ��������
����ͼ����������һ����ѧ�Ƶ�������ָ���ü������ͼ����Ϣ���мӹ��������˵��Ӿ���������Ӧ���������Ϊ�����ż������ѧ�����IJ��Ϸ�չ��ͼ�����ͷ������γ����Լ��Ŀ�ѧ��ϵ���µĴ������������������䷢չ��ʷ��������ȴ�����������ʿ�Ĺ㷺��ע��21������һ��������Ϣ��ʱ����ͼ����Ϊ�����֪������Ӿ��������������ȡ��Ϣ��������Ϣ�ʹ�����Ϣ����Ҫ�ֶΡ����ȣ��Ӿ�����������Ҫ�ĸ�֪�ֶΣ�ͼ�������Ӿ��Ļ�������ˣ�����ͼ���Ϊ����ѧ������ѧ���������ѧ����������ڵ�ѧ�����о��Ӿ���֪����Ч���ߡ���Σ�ͼ�����ھ��¡�ң�С�����ȴ���Ӧ�����в�������������
����ͼ��������Դ��20����20�������ʱͨ�������´�Ӣ���ص�����ŦԼ������һ����Ƭ������������ѹ����������������ͼ�����������������Ǹ��ۡ�ȷ����ʶ���磬�˵��Ӿ�ϵͳ���������������ȡ3/4���ϵ���Ϣ����ͼ��ͼ�����������Ӿ���Ϣ�����壬�������۵ļ������ܸߣ�����ʶ����ǧ����ɫ�����ܶ�����£�ͼ�����������˵��ģ���������Dz��ɼ��ģ�ͨ��ͼ����ǿ����������ʹģ���������ɼ���ͼ����������������һ���棬ͨ������ͼ�����е�ģʽʶ���������Խ�������ʶ���ͼ����з��ദ����ͨ�������ģʽʶ�������Կ���ȷ�ļ�����ƥ���ʶ������ֶ���[1]��
2��2 ͼ��ָ�
2��2��1 ͼ��ָ��о���״
ͼ��ָ���ͼ��������Ϊ��������Ҫ������֮һ�����Ƕ�ͼ������Ӿ�������ģʽʶ��Ļ���ǰ�ᡣͼ��ָ��Ŀ�����ڸ���ijЩ������һ��ͼ��ֳ����������������ʹ����Щ������ijһ�����ڱ���һ�»����ƣ����ڲ�ͬ�������ֳ����ԵIJ�ͬ�����������Ѿ���������ͬ���͵�ͼ��ָ��������ķ�������ֵ�����������������ɳڷ�����Ե��ⷨ���Լ����Ѻϲ����ȣ��ִ��ķ������������編��ģ�����෨�ȡ���Щ�ָ������ֱ��Ӧ�����κ�ͼ����һЩֻ����������������ͼ����Щ�㷨��Ҫ�ȶ�ͼ����дַָ��Ϊ������Ҫ��ͼ������ȡ��������Ϣ�����磬���Զ�ͼ��ĻҶȼ��������ķ����ָͼ��ָ��Ǵ�ͼ������ͼ������Ĺؼ����裬����˵��ͼ��ָ����ĺû�ֱ��Ӱ���ͼ�������[2]��
���ڵ�ͼ���о��У�ͼ��ķָ����Ҫ���Է�Ϊ�����ࡣһ���DZ߽緽�������ַ����ļ�����ͼ��ָ�����ij����������ԭ����ͼ����һ�����б�Ե���ڣ�һ�������������ַ����ļ�����ͼ��ָ�����������һ��������ͬ�����ʣ�����ͬ���������û�й�ͬ�����ʡ������ַ�������ȱ����ŵ㣬�е�ѧ��Ҳ��ͼ�����߽����������ͼ��ָ���ż����������������ߣ��ܶ������ӿ�֣�����ڲ�ɫ�����ָ����ͼ��ָ��ʹ�õĽ�ѧ���ߺ�ʵ���ֶ�Ҳ�Dz��ϵ���չ����ʱ���źŵ�Ƶ���źŴ���������С���任ҲӦ����ͼ��ָ�С�
����ͼ��Ŀ��ָ�����ȡ������ͼ�����ͼ�����Ӿ�������һ�����ܹ�ע���о���֧����Ϊ��Ŀ��ָ�����ȡ�����п������ô���������ͼ�����ķ������������ڼ�����Ӿ���ģʽʶ��������еĹ㷺Ӧ�ã����������ڶ��о��ߵ�ע�⡣���Ŷ���һ����������о�����������ƶ���һ����Ľ�������ұؽ��ƶ�ģʽʶ�𡢼�����Ӿ����˹����ܵȼ������ѧ��֧�ķ�չ��ͼ��ָ�ͱ�Ե���������ڽ���ʮ���еõ��˹㷺�Ĺ�ע�ͳ���ķ�չ��������ܶ��о���ʿ����˺ܶ�����ڲ�ͬ������ȡ����һ���ijɹ������Ƕ���Ѱ��һ���ܹ��ձ������ڸ��ָ��������ȷ�ʺܸߵķָ�ͼ���㷨�����кܴ��̽���ռ䡣
��Ե��ȡ�ͷָ���ͼ������ľ����о�����֮һ��Ŀǰ�����ۺͷ����Դ��������֮�������ڲ��ϸĽ��ͷ�չ����Ҫ˵�����ǣ���Ե�������ı߽粢����ͬ����Եָ����ͼ�������ص�ֵ��ͻ��ĵط����������ı߽�ָ������ʵ�����еĴ���������֮��ı߽硣�п����б�Ե�ĵط����DZ߽磬Ҳ�п��ܱ߽�ĵط����ޱ�Ե����Ϊ��ʵ�е���������ά�ģ���ͼ��ֻ���ж�ά��Ϣ������ά����ά��ͶӰ���ɱ���Ļᶪʧһ������Ϣ���������Ĺ����еĹ��պ�����Ҳ�Dz��ɱ������Ҫ���ء�������Ϊ��Щԭ���ڱ�Ե��ͼ��ָ���Ȼ�ǵ�ǰͼ���о��е����缶���⣬Ŀǰ�о�����������ͼ�ڱ�Ե��ȡ�м���߲��������Ϣ��
����ͼ��Ķ����Ժ����ԣ�����ָ�Ĺ���������������Զ���ɣ����ֹ��ָ��ִ��ڹ�������λ��ȷ�����⣬��ˣ����������һЩ�˹������ͼ�����Զ���λ���ϵķ��������ø��Ե����ƣ�ʵ��Ŀ�������Ŀ��ٶ�λ��������Щ����ʽ������Ӧ�ã��ؽ��ƶ�ͼ��Ŀ��ָ�����ȡ��һ�Ⱦ��й�����Ӧ��ǰ���־�����Ҫ��ѧ����ֵ�Ŀ���Ľ�һ���о���Ҳ�ؽ���Ϊһ����Ϊ�����ͻ�Ծ���о�����[3]��
2��2��2 ���ڵ�����
ͼ��ָ��������������ͼ�����ݵ�ģ���������ĸ��š�ǰ���Ѿ��ᵽ����ĿǰΪֹ����û��һ�ֻ��������Ƶķָ�������������ǵ���Ըȷ�ķָ��κ�һ��ͼ��ʵ��ͼ���о���������죬������������������Ҫ����ʵ�����ѡ���ʺϵķ������ָ����ĺû�������ȷ���Ŀǰ��û��һ��ͳһ�������ж��ָ�ĺû�����ӷָ��Ч����ʵ��Ӧ�ó������жϡ������������о�ͼ�����ʷ�У����ǻ��������ྭ���ͼ��ָ������Ȼ��Щ�ָ�����ʺ��������͵�ͼ��ָ������Щ����ȴ��ͼ��ָ����һ����չ�Ļ�������ʵ�ϣ��ִ�һЩ�ָ��㷨ǡǡ�ǴӾ���ķָ�����������ġ�
2��2��3 �����������
��ĿǰΪֹ����û��Ψһ�ı��ķָ�������ͬ�����ͼ����ﶼ����Ϊ���ָ��ͼ�����ݣ���ͬ���͵�ͼ���Ѿ������Ӧ�ķָ������ָͬʱ��ijЩ�ָ��Ҳֻ���ʺ���ijЩ�������͵�ͼ��ָ�ָ����ĺû���Ҫ���ݾ���ij��ϼ�Ҫ���������Ϊ��ͬ�ķָ���ķָ�Ч���Dz�һ���ģ�����ͼ���ɫ�ʿռ�IJ�ͬ����ָ�Ч��Ҳ�Dz�һ���ġ���������Ǵ���һ���������о�ͬһ�ַָ����һ��ͼ����RGB��HSIɫ�ʿռ��µķָ�Ч����������ж����Ƚϡ�
3 ��ɫ�ռ�
3��1 ��ɫ�ռ����
ɫ�ʿռ䣬ͨ��һ�㽲�����Ǹ���ɫ�ʵļ��ϣ�ɫ�ʵ�����Խ�࣬ɫ�ʿռ�Խ���ܹ����ֵ�ɫ�ʷ�Χ��ɫ��Խ�㡣ɫ�ʿռ�Ҳ��Ϊɫ��ϵͳ��ɫ��ģʽ������ɫ�ʿռ����ҪĿ�����ṩһ���ɽ��ܵ�ָ��ɫ�ʱ���
����ͼ���ڼ�����еĴ洢��ʽ��������ɫ�ռ�ɷ�Ϊ��ֵͼ�Ҷ�ͼ��RGBֵͼ��HSV ֵͼ��NTSC ֵͼ��ȡ���ֵͼ����һ�� 2 ���Ҷ�ͼ��������ص�ȡֵΪ 0 �� 1���Ҷ�ͼ��һ�㰴�Ҷȼ��� 16 ����64 ����256 ���ȻҶȸ�ʽ��
�����йز�ɫ�Ӿ�ϵͳ����ƿ������ԣ��о���ɫ���൱��Ҫ�ġ�ͼ���е���ɫ���������ǵĸо������ã������ܻ�ø�����Ӿ���Ϣ���˵��Ӿ��Բ�ɫ�൱���С�����һ�������ֵĻҶȵȼ�ֻ�ж�ʮ����������������в�ͬ���ȡ�ɫ�Ⱥͱ��Ͷȵļ�ǧ����ɫ�����Բ������ɫ���������ȡ�ɫ�Ⱥͱ��Ͷȡ����ȷ�ӳ���ܲ�������Ӷȣ�ɫ��ָ��ɫ����ɫ����ɫ���Ե�ɫ��Դ���ԣ�ɫ�ȵIJ�ͬ�Բ����IJ�ͬ��ʾ�����Ͷ��� ���Բ���İ�ɫ����뵥ɫ��ıȡ�������ͼ�������ò�ɫ��Ϣ�������ͼ��Ŀɼ����ԣ�ʹͼ��ϸ�ڸ����ױ��ϣ�Ŀ�������ʶ���ڽ�������ͼ����ʱ�����Dz����Ƕ�������ɫһһ���������Ǹ���ɫ��ѧ���۽�����ɫģ�ͣ�������ɫģ�ͽ��д�����
ɫ��ѧ������Ϊ���κ���ɫ�������ɺ죨R�����̣�G��������B�����ֻ�����ɫ����ͬ������ϵõ������ݼ����ɫ�����ۣ���ÿһ����ɫ���ԣ��ڼ�������в�ͬ�ı��﷽ʽ���������γ��˸��ֲ�ͬ��ɫ��ϵͳ����ɫ�ʿռ䡣��Ȼ��������ɫ�ռ�ֻ��������ɫ�ڼ�����ڲ�ͬ�ı�����ѣ�ÿһ��ɫ�ʿռ䶼�и��ԵIJ���������Ӧ������ȡ���Ҫ��ɫ�ʿռ���RGB��CMY/CMYK��YCbCr��HSI��YIQ��YUV�ȡ����У�RGBɫ�ʿռ����������ɫ�ʿռ䣬����ɫ�ʿռ䶼�ǻ��ڸ�ɫ�ʿռ�ģ�ֻ����;���졣������RGBɫ�ʿռ����һ���Ĺ�ϵ����ת����
��RGBΪ�����IJ�ɫ�ռ��Ǽ��������ͼ����������IJ�ɫ�ռ䣬��Ϊ�˲�ͬ��Ҫ���о�����������IJ�ɫ�ռ䡣1931��CIE (Committ��e International Illuminance����������ίԱ��)�о��������Ӿ���֪�������һ��3ά��ɫ�ռ������ΪCIE XYZ���ñ������ڹ㷺ʹ�á�������CIE���ƶ��˼��ֲ�ɫ�ռ䣬�����㲻ͬ��Ҫ�����磬Ϊ�˵õ����ɫ�Ӿ�һ�µ�����ռ䣬CIE��1976���������Lab��ɫ�ռ䡣NTSC(The National Television Systems Committee���������ҵ���ϵͳίԱ��)������һ�ֳ�ΪYIQ�IJ�ɫ�ռ䣬�ò�ɫ�ռ������������ӡ�����Ҫ�ŵ��ǻҶ���Ϣ���ɫ��Ϣ�Ƿ���ģ�����ͬһ�źżȿ����ڲ�ɫ�����ֿ����ںڰ��ӡ�HSI��ɫ�ռ�Ҳ��һ�ֳ��õIJ�ɫ�ռ䣬���ŵ������ܹ���ͼ���еIJ�ɫ��Ϣ��Ҷ���Ϣ���룬�����������ûҶ�ͼ����������
3��2 ���ֲ�ɫ�ռ�
3��2��1 RGB��ɫ�ռ�
RGB ��ɫ�ռ�������ʹ����࣬����Ϥ�IJ�ɫ�ռ䣬������Ӳ���ģ�ͨ��������ʾ����CCD ����ͷ����ӡ������ʾ�豸�У�ͼ������ʹ�õ������ռ�һ�㶼�Ǵ� RGB�ռ�ת�������ġ������� 3 άֱ������ϵ���졢�̡���ԭɫ�Ǽ���ԭɫ������ԭɫ�����һ���������ɫ��
RGB ��ɫ�ռ�ͨ������ͼ��λ����������ʾ��������������Խ����ϣ���ԭɫ��ǿ����ȣ������ɰ������İ�ɫ��Ҳ���Dz�ͬ�ĻҶ�ֵ��(0��0��0)Ϊ��ɫ��(1��1��1)Ϊ��ɫ������������������ǵ�ֱ�Ϊ�졢�ơ��̡��ࡢ����Ʒ�졣�� R, G,B�����ϳ� RGB ͼ��ʾ��ͼ����ɫ�������ڵ� 3 �����档����ͼ��ʾ��
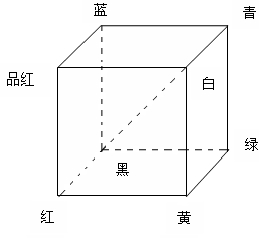
ͼ1 RGB ������
��������ɫԭ�����û�ɫ�ⵥλ����ʾ�����������RGB��ɫ�ռ䣬����ɫ��F��������R��G��B��ɫ��ͬ��������ӻ�϶��ɣ�
F��r [ R ] + g [ G ] + b [ B ] ��1��
��֪��Ȼ�����κ�һ��ɫ�ⶼ����R��G��B����ɫ����ͬ�ı�����ӻ�϶��ɣ�������ɫ������Ϊ0��������ʱ���Ϊ��ɫ�⣻������ɫ������Ϊk����ǿ��ʱ���Ϊ��ɫ�⡣��һ��ɫF����������������е�һ�㣬������ɫϵ��r��g��b�е���һϵ������ı�F������ֵ��Ҳ���ı���F��ɫֵ��RGB��ɫ�ռ������������ɫ��ʾ��������������������ʺϲ�ɫ����ܹ�����Ȼ����һ���Ʋ�����Ӧ�˵��Ӿ��ص㡣�����������������ͬ����ɫ�ռ��ʾ��[1]��
3��2��2 HSI ��ɫģ��
H��S �ֱ�ָɫ���뱥�Ͷȣ�I ����Ϊǿ�ȡ�HSI ��ɫģ���ܰ�������ɫ����ȫ�ֿ����Դ������ܹ���Ӱ���ͼ���ж���֮����
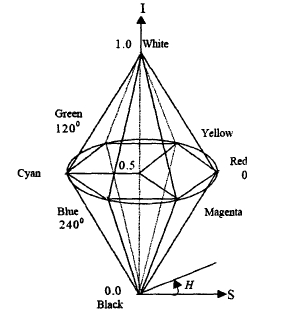
������RGBģ���е�R=1��G=1��B=1 �����棬����������ɫ������ɫ��H����V�����ת�Ǹ�������ɫ��Ӧ�ڽǶ�0�㣬��ɫ��Ӧ�ڽǶ�120�㣬��ɫ��Ӧ�ڽǶ�
240�㡣��HSV��ɫģ���У�ÿһ����ɫ�����IJ�ɫ���180�㡣���Ͷ�Sȡֵ��0��1������Բ����İ뾶Ϊ����
HSV��ɫģ������������ɫ����CIEɫ��ͼ��һ���Ӽ������ģ���б��Ͷ�Ϊ�ٷ�֮�ٵ���ɫ���䴿��һ��С�ڰٷ�֮�١���Բ�Ķ���(��ԭ��)����V=0,H��S���壬 ������ɫ��Բ�Ķ������Ĵ�S=0��V=1,H���壬������ɫ���Ӹõ㵽ԭ��������Ƚ����Ļ�ɫ�������в�ͬ �ҶȵĻ�ɫ��������Щ�㣬S=0,H��ֵ���塣����˵��HSVģ���е�V���Ӧ��RGB��ɫ�ռ��е����Խ��ߡ� ��Բ�����Բ���ϵ���ɫ��V=1��S=1,������ɫ�Ǵ�ɫ��HSVģ�Ͷ�Ӧ�ڻ�����ɫ�ķ����������øı�ɫŨ�� ɫ��ķ�����ij�ִ�ɫ��ò�ͬɫ������ɫ����һ�ִ�ɫ�м����ɫ�Ըı�ɫŨ�������ɫ�Ըı�ɫ�ͬʱ���벻ͬ�����İ�ɫ����ɫ���ɻ�ø��ֲ�ͬ��ɫ����
HSI��ɫ�ռ������һ��Բ�ռ�ģ�������������£�
ͼ2 HSI��ɫ�ռ�
����������HSI��ɫ�ռ��Բģ���൱���ӣ���ȷ�ܰ�ɫ�������Ⱥ�ɫ���Ͷȵı仯���α��ֵú���������У�
��1��HSIԲ�ռ�ģ��
��2������ʾ��ͼ��Բ�����ȡ�ɫ�Ⱥͱ��ͶȵĹ�ϵ��
��3�������ʾ���ȣ�����ֵ������Բ�����߶����ģ�����Բ�����ϵĵ��ʾ��ȫ�����͵���ɫ�� ���ղ�ͬ�ĻҶȵȼ���������Ϊ����ɫ�����Ϊ����ɫ��
��4��Բ�����棺������ͬһɫ���IJ�ͬ���Ⱥͱ��Ͷȹ�ϵ��
��5��Բ�����棺ɫ��HΪ����Բ���������ɫ����Բ���ϵ���ɫΪ��ȫ���͵Ĵ�ɫ��ɫ���Ͷ�Ϊ �������ĵİ뾶���ᡣ ͨ����ɫ���ͱ��Ͷ�ͨ��Ϊɫ�ȣ�������ʾ��ɫ���������dz�̶ȡ������˵��Ӿ������ȵ����г̶�Զǿ�ڶ���ɫŨ�������г̶ȣ�Ϊ�˱�����ɫ������ʶ���˵��Ӿ�ϵͳ��������HSI��ɫ�ռ䣬����RGB��ɫ�ռ�������˵��Ӿ����ԡ���ͼ�����ͼ�����Ӿ��д����㷨������HSI��ɫ�ռ��з����ʹ�ã����ǿ��Էֿ�����������������ġ���ˣ���HSI��ɫ�ռ���Դ���ͼ������ʹ����Ĺ�����[1]��
3��2��3 CMY��ɫ�ռ�
��ǰ����������ɫ������ɫ�ͻ�ɫ���ǹ�ĺϳ�ɫ�������ɫ�������磬���ð�������ɫ�ı���ʱû�к���������淴�������Ҳ����˵������ɫ�ӷ���İ��г�ȥ��⣬��Ȿ���ɵ����ĺ���������ɡ�
������ֽ�϶ѻ���ɫ���豸�����ɫ��ӡ������ӡ����Ҫ��CMY������������һ��RGB��CMY�ı任����һ�任������һ�ı任��ʽ��ʾ��
C = 1 �C R
M = 1 �C G ��2��
Y = 1 �C B
����ٶ����е���ɫֵ���ѱ�������[0��1]��Χ�ڡ���ʽ������һ��������ɫ���淴��Ĺ����в�������ɫ����C = 1- R��,���Ƶģ�������ɫ��������ɫ������ɫ��������ɫ����ʽ��ʾ��RGBֵ���Ժ�������1��CMY�ĵ���ֵ�ķ�����á���ǰ������CMYģ����ͼ���������ڲ���Ӳ��������ϣ���ˣ���CMY��RGB�ķ��任����ͨ��û��ʵ�����塣
3��2��4 YIQɫ�ʿռ�
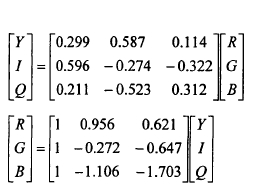
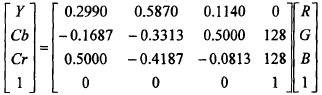
YIQɫ�ʿռ�ͨ���������ĵ���ϵͳ��Ӧ�ã�����NTSC��National Television Standards Committee��ϵͳ������Y����ָ��ɫ������ָ��ɫ�����Ӷȣ�Luminance��,������(Brightness)����ʵY����ͼ��ĻҶ�ֵ����I��Q����ָɫ����������ͼ��ɫ�ʼ����Ͷȵ����ԡ���YIQϵͳ�У�Y��������ͼ���������Ϣ��I��Q����������Я����ɫ��Ϣ��I���������ӳ�ɫ����ɫ����ɫ�仯����Q�������������ɫ������ɫ����ɫ�仯������ɫͼ���RGBת����YIQɫ�ʿռ䣬���Ѳ�ɫͼ���е�������Ϣ��ɫ����Ϣ�ֿ����ֱ�������д�����YIQ��RGB֮��Ķ�Ӧ��ϵ�繫ʽ3��ʽ4��


3��2��5 YUVɫ�ʿռ�
YUVɫ�ʿռ���YIQɫ�ʿռ�һ��������ʹ���ڵ���ϵͳ�ϣ�����һ������YUVɫ�ʿռ䱻ŷ�ĵ���ϵͳ�����ã�����PAL��Phase Alternation Line��ϵͳ������������ǽ������ź���ɫ���źŷֿ���ʾ������Y��YIQɫ��ϵͳ��Y��ͬ����ʾ��ɫ�������ȣ���U��VҲ��ָɫ������ʾɫ�һ������ɫ�ͺ�ɫ�����ֵ���������ʾ��ʽȴ��I��Q��ͬ��
��YUV�ռ��У�U��V��ƽ���ϵ������������ʸ�������£�
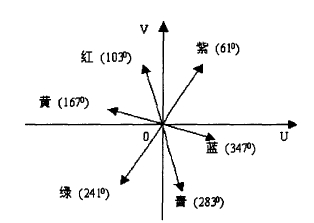
ͼ3 YUVɫ�ʿռ�
ɫ���źţ���U��V֮�ͣ���һ����άʸ������֮Ϊɫ���ź�ʸ����ûһ����ɫ��Ӧһ��ɫ���ź�ʸ�������ı��Ͷ���ģֵCh��ʾ��ɫ������λ�DZ�ʾ��
3��2��6 YCrCbɫ�ʿռ�
YCrCbɫ�ʿռ���һ�ֳ�����ɫ�ʿռ䡣�����ϱȱȽ��ǵ�JPEGͼƬ���õ�ɫ
�ʿռ����Ǹÿռ䡣����YUVɫ�ʿռ��������������У�Y��Ϊ���ȣ���Cr��Cb��
�ǽ�U��V�������������õ��ģ�Cr��ʾ��ɫ������Cb��ʾ��ɫ������YCrCbɫ��
�ռ���RGBɫ�ʿռ��ת����ϵ�繫ʽ5��ʽ6��ʾ��


3��3 RGB��HSI���ת��
HSI��ɫ�ռ��RGB��ɫ�ռ�ֻ��ͬһ�������IJ�ͬ��ʾ�����������֮�������ת����ϵ��RGBת��ΪHSI�ռ䣺

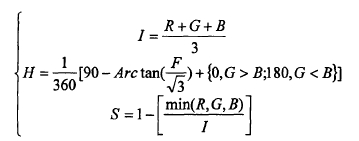



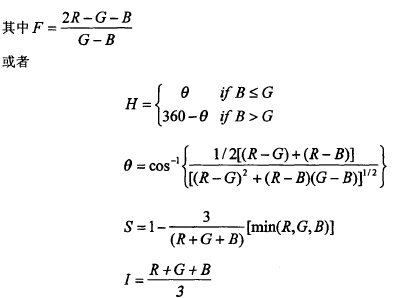
��ʽ�У�R��G��BΪRGBɫ�ʿռ�ĺ졢�̡���������H��S��I�ֱ�ΪHSIɫ��ϵͳ��ɫ�ȡ����ͶȺ����ȷ�����
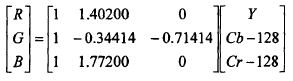
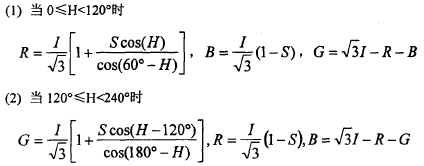
HSIת��ΪRGB�Ĺ�ʽ���£�


4 ͼ��ָ��
�ԻҶ�ͼ��ķָ�ɻ������ػҶ�ֵ����������:�������Ժ������ԡ������ڲ�������һ����лҶ�������,��������֮��ı���һ����лҶȲ������ԡ����Էָ��㷨�ɾݴ˷�Ϊ���������ҶȲ������ԵĻ��ڱ߽���㷨�����������ڻҶ������ԵĻ���������㷨��Ҳ����˵ͼ��ָ���¿��Է�Ϊ���ڱ�Ե���ķ����ͻ�������ķ��������ڱ�Ե���ķ���ʹ�þֲ����ڲ����������ֲ����ԵIJ������ԣ��ٽ��������ɱ߽磬��Щ�߽��ͼ��ֳɲ�ͬ������������ķ�����ij������Ϊ�ذ�ͼ���Ϊ���ɹ���飬�Ժ�����һ�µ�ԭ�����ֿ����Բ�һ�µ�ͼ��飬�ϲ�����һ�����Ե�����ͼ��飬ֱ���γ�һ������ͼ����ʵ��Ӧ���У��Ӳ�ͬ�����۽Ƕ���������������Щ������Ҫ�ɻ���Ϊ��������:��ֵ�͡���Ե����ͺ����������[4]��
4��1 �Ҷ���ֵ�ָ
ͼ����ֵ�ָ���һ�ֹ㷺ʹ�õ�ͼ��ָ����������ͼ����Ҫ��ȡ��Ŀ�����뱳���ڻҶ������ϵIJ���,��ͼ����Ϊ���в�ͬ�Ҷȼ���������������,ѡȡһ�����ʵ���ֵ,��ȷ��ͼ����ÿ�����ص�Ӧ������Ŀ�껹�����ڱ�������,�Ӷ��õ���Ӧ�Ķ�ֵͼ������������ѹ������,���ٴ洢��,���ҿ��Դ���̷����ʹ������衣���ַ�������ȷ��һ������ͼ��Ҷ�ȡֵ��Χ֮�еĻҶ���ֵ��Ȼ��ͼ���и������صĻҶ�ֵ���������ֵ��Ƚϣ������ݱȽϽ������Ӧ�����ػ���Ϊ����:���صĻҶ�ֵ������ֵ��Ϊһ�࣬���صĻҶ�ֵС����ֵ��Ϊ��һ�ࡣ����������һ�������ͼ���е������������Զ����ظ�����ֵ����ﵽ������ָ��Ŀ�ġ���ֵ�ָ���Է�Ϊȫ����ֵ�;ֲ���ֵ�������; ��ֵѡȡ���������ݻ�����ͼ��Ҷ�ֵ�ĻҶ�ֱ��ͼ,����һ��ͼ��,�����ǻ��ڶ���ֵ�ָ�,Ҳ�����ǵ��ָ�,��Ȼ����ֵ�ָ��ܸ���һ�����ͼ��ķָ�����,������ֻ�Ƿָ�ɴ�������,�뵥��ֵ��ԭ������һ���ġ������ϲ����п�֪��ȷ����ֵ�Ƿָ�Ĺؼ�. ��ֵһ���д��������ʽ:
T=T[x,y,p(x,y),q(x,y)]
���� P(x,y)�������ص�(x,y)���ĻҶ�ֵ��q(x,y)�����õ�����ľֲ����ԡ���� P(x,y)>T�����(x,y)��������㣬��֮����������㡣���ݶ�T �IJ�ͬ���ƣ��ɵõ����ֲ�ͬ���͵���ֵ����:
ȫ����ֵ T=T[p(x,y)](ֻ��ȫͼ�����صı��������й�)
�ֲ���ֵ T=T[p(x,y ),q(x,y)](�������ڸ����ص�ֵ����������ֵ��ϵ���й�)
��̬��ֵ T=T[x,y,p(x,y),q(x,y)](�����ؿռ����ꡢ�õ��������ʡ��õ�ľ�
�����������йأ�
��ֵ��ѡ��ͨ��������ֱ��ͼ������ֱ��ͼ���������ָ��ֱ�ۣ�Ӧ�����ձ顣���ַ�������ֱ��ͼ�������Ե�˫��ͼ�ɻ�úܺõķָ�Ч������ͼ�����ݲ�̫���ӡ��Ҷȷֲ��ϼ��е�����£������������ȫ����ֵ����������ͼ���е��λ�ú����������ʡ�����ʵ�����д������Ȼ�����ͼ��ֱ��ͼ�仯�ḻ�����ٱ���Ϊ���Ե�˫�塣��������ͼ��һ�ַ����ǽ�ͼ��ֳ�����С�鼴��ͼ����ÿ���趨�ֲ���ֵ����һ�ַ����Ǹ��ݿռ���Ϣ�ͻҶ���Ϣֵ���ö�̬��ֵ��
4��2 ��Ե���ָ
��Ե���ָ��ͨ��������ͬ����߽������зָ�ġ���Ե������ǿ��ͻ�����ʽ���֣����Զ���Ϊͼ��ֲ����ԵIJ������ԣ���Ҷȵ�ͻ�䡢�����ṹ��ͻ��ȡ���Ե������ζ��һ��������ս����һ������Ŀ�ʼ��ͼ��ı�Ե������������״����Ҫ��Ϣ���������ڷ���ͼ��ʱ����ȵؼ�����Ҫ��������Ϣ�������һ�������Ŀ��ı߽�ṹ����ˣ���Ե�����Կ����Ǵ������ิ������Ĺؼ������ڱ�Ե�ļ�ⳣ�������ڿ��������ӽ��У�ͨ������ģ����ͼ�������ɡ��������в�ͬ�Ҷ�ֵ����������֮���ܴ��ڻҶȱ�Ե���Ҷȱ�Ե�ǻҶ�ֵ������(��ͻ��)�Ľ�������ֲ���������������һ�Ͷ���������ļ������ִ�ľֲ�������Ե��ⷽ���У���Ҫ��һ����(Sobel���ӡ�Roberts���ӵ�)��������(������˹���ӵ�)��ģ�����(Prewit���ӡ�Kirsch���ӡ�Robinson����)��
��Щ��Ե������Ա�Ե�Ҷ�ֵ���ɱȽϼ�����������С�Ȳ�̫���ӵ�ͼ�������ȡ�㷨������ȡ�ýϺõ�Ч���������ڱ�Ե���ӡ��ɹⲻ���ȵ�ͼ����˵����Ч����̫���롣��Ҫ����Ϊ��Եģ������Ե�ǵ����ؿ�������Ե��ʧ�������Ե�IJ������ȷ��档�������ϴ������³��õı�Ե����㷨����Marr���ӣ��ݹ��˲�����Canny���ӵȶ����ȶ�ͼ������ʵ���ƽ��������������Ȼ�������������ȶ�ͼ����оֲ���ϣ�Ȼ��������ϵĹ⻬�����ĵ���������ֱ�ӵ���ֵ������Canny���ӽ�Ϊ�����ҿ������ݶȷ���Ч���Ⱥá���������һ�ֱ�Ե������ӣ��ź���������Ϊֹ��û��һ���̶����������������ӵ����������һ��Canny�������� Canny����Ϊһ�������ı�Ե����Ӧ������������:
��1���õļ�����ܡ������е͵İ���ʵ��Ե��Ϊ�DZ�Ե���ѷDZ�Ե�����ж�
Ϊ��Ե��ĸ��ʡ�
��2���õĶ�λ���ܡ����ж�Ϊ��Ե�ĵ�Ӧ�����ܿ�����ʵ��Ե�����ġ�
��3��Ψһ�ԡ������ڵ�����Ե�����һ����Ӧ����Ϊ��һ����ܶ���ͬ�ı�Ե
����������Ӧ�����Ա�����Ϊ������һ���Ǽٵġ���һ���ܸ�����һ��Ӧ���������������������
4��3 ������ٷָ
���������������ַ�������Ȥ��������ֵ�IJ�𣬶����������Ѱ�Ҿ��������Ե�����Ⱥ�����Ƕ�Ӧij��ʵ�������ƽ������壬���ķ����Ǵ�ijһ���س�����������һ����ԭ��(���һ���Կ����ǻҶȼ�����ɫ����֯���ݶȻ���������)���������أ�������������������Щ������ɵ�����ʹ��ij�־��Ȳ�Ⱥ�������������ԡ���Ϊ�棬�������������ֱ�����Ȳ��Ϊ�١����õķ���������ָ������������������Ѻϲ�����
�����������Ǵ������������������Ǵ���������ĵ㿪ʼ���Ӹ�������ʼ�����������壬��Ϊ����ͬһ���������ص�ĻҶȼ�����С���ɼ���1Ϊһ�������������һС�����壬��ô��ʼ��������������ĻҶ�ֵ�������������������㲢������С���У����ڽ��㱻���ܺ����������µ�1�����õõ�����1�ظ�����Ĺ��̣�ֱ��û�пɽ��ܵ��ڽ���ʱ������������ֹ�������ȶ�ÿ����Ҫ�ָ��������1������������Ϊ���������,Ȼ������������Χ��������������������ͬ�Ļ��������ʵ�����(�������ȷ�������������������ж�)�ϲ��������������ڵ������С�����Щ�����ص����µ��������ؼ�����������Ĺ���,ֱ����û���������������ؿɱ���������������һ������ͳ����ˡ�
������Ѻϲ��������Ƚ�ͼ��ָ�Ϊ��ʼ������Ȼ����Ѻϲ���Щ������������ָ�����ܣ�ֱ�����ͼ��ָ�Ϊ���ٵľ�������Ϊֹ��
�����������㷨����İѻҶȻ�������ͬһ����ռ��λ����ϵ��һ������ܵõ������Ч����Ŀǰ��ͼ���ij�ʼ���ֳ������ǹ̶��Ļ�����Ϊ�涨�ġ�ʵ���ϣ�ÿ��ͼ��Ӧ������һ���ʺ����ij�ʼ�������ѻ��֣�����б�Ҫ����Ӧ��ȷ��ͼ���ij�ʼ���֡�����ͼ����һ���Զ��������������г����������ûҶȻ�Ҷ�ͳ�����Եķ������ûҶȵķ����Ƚϼ�Ч�����ܺã��ûҶ�ͳ�����Եķ���Ч���ȽϺã�����������Ӱ�촦���ٶȣ����Ҳ�б�Ҫ̽�����Ч�Ķ���ͼ�������һ���Եķ�����
4��4 ��������ͱ߽�ķָ��
���ڱ�Ե���ķ�������Canny�㷨����Ȼ����һ�����ŵ����Ա�Ե������ӣ����������û��ڱ�Ե���ķ������õ��������߲��ܱ�֤�Ƿ�յģ������Ҫ���б�Ե���ٴ������⽫ʹ�ñ�Ե��λ����ȷ����������ķ�������������������÷����е�����һ�����ȸ��������������������������������������������״�ģ���ˣ����ֻ��ڹ̶�������״�ķ�������ָ��ٶȽ�����ʹ�÷�ˮ�뷽������ͼ��ָ�֮���������������ӵ�ԭ��һ��������ٶȽϿ죬�������������ߵķ���ԺͶ�λ�ľ�ȷ�ԡ�
��ͼ��ָ��У���ˮ��任ʹ�õ����ݶ�ͼ�������ݶ�ͼ�����������ĸ��ţ�ʹ���ݶ�ͼ���е�������Сֵ���࣬����ˮ��任��õ���ͼ��������Ŀ���ݶ�ͼ���������Сֵ��Ŀ��ͬ(�����γɹ��ȷָ�ĸ���ԭ��)�������Ҫ��ԭʼͼ�����ƽ����
��ˮ���㷨��������ͽ�ˮ�������̣�����������̰������صĻҶȽ��������Ա�ֱ�ӷü�ͬһ�߶ȵ����أ��ڽ�ˮ�����У�����߶�С�ڵ���h�����ص���ˮ����Ѿ���dz����ˣ����ڴ����߶�Ϊh + 1������ʱ������һ�������ѱ�ǵ���ˮ������ڵ��������������ȳ�(FIFO)���У�������Щ���ؿ�ʼ�����ݲ�ؾ��룬���Ѿ���ǵ���ˮ�����չ�� h+ 1��;Ȼ��ͨ��ɨ�裬�� h+ 1���п��ܴ��ڵ�������Сֵ�����µı�ţ�����ڷ�ˮ��任�Ľ���У�ͬһ��ŵ���������ͬһ��ˮ��أ������ͬ��ˮ��ؾ�����ȵ����ر�Ϊ��ˮ��㡣
ͼ��ָ��Ŀ���ǽ�ͼ��ָ�ɲ�ͬ�����壬����ȡ�����������������������������ǻҶȱ仯�Ƚ�ǿ�ҵ�ͼ�֣����ݶ�ͼ������������ÿ�����ص�ĻҶȱ仯�������ˣ���ʹ���ݶ�ͼ��ķ�ˮ��任������ͼ��ķָͼ�����߽�ƽ���������ݶ�ͼ���پ��ݶ�ͼ��ķ�ˮ��任�õ���ʼ�ָ��������������һ���̶��ϼ�����ȷָ���Ը���ͼ����˵����������������Ȼ���ڹ��ȷָ���������˻���Ҫ��������ˮ��任�Ļ����ϣ�����������ںϣ��Ա�õ�������ķָ���������ij������˵������Ҷ�����������ȫ���Եģ����߽��ǿ�����Ǿֲ��Եġ����⣬���ڳ�ʼ��ˮ��任�õ��ķָ���������϶࣬�����������Խ�С�����������ĻҶ�����Խ�ǿ����ʱ����Ӧ�ûҶ�������������г�ʼ�ںϣ��˺�����������������ӣ��Ҷ�����Խ����������������صĻҶȷ���ϴ�ʱ���˲��ûҶ���������Ӧ���ñ߽�ǿ��������ںϡ�
5 ͼ��ָ�Ч������
���Ƕ�ͼ��ָ�Ľ��ͨ�����˵������о���Ϊ�������ܶԴ����ͼ����������ԣ������������˵��Ӿ������Բ�ͬ�ָ���Ĵ��������һ�����ıȽϡ�����Ҳ�DZ���ġ�����һ�������嵫�Ƚ����ѵ����⡣��Ŀǰ����������������ѧ�����ⷽ������һЩ������һ����Ϊ�Էָ�������ۿ���ͨ��������ʵ�����ַ�ʽ�����С���ˣ��ָ����۷������Է�Ϊ��������ʵ�鷨�����ࡣ��������ֱ�ӷ����ָ��㷨������ԭ�������ܣ���ʵ�鷨��ͨ���Բ���ͼ��ķָ����������㷨�ġ�ͨ����ʵ�ʷָ����ķ����������ָ��㷨�Ǿ���ʵ������ġ��йطָ��������ʵ�鷽���Ѿ�����˲��٣������ֿ��Է�Ϊ�Ŷȷ���ƫ����ࡣƫ�������Ҫ�����ṩһ������ָ�ͼ����Ϊ�Ƚϱ�������������ʵ�ʷָ���������ָ�ͼ��IJ�����ֲ������ǻ��ڴ���ָ����������Ҳ�����ǻ��ڴ���ָ����ص��λ�ã������ǻ��ڷָ����������IJ��ȵȡ�ʵ������ǿɹ��Ƚϵ�ͼ����������ͳһ�϶�����ˣ��������ʵ�����кܴ�ľ����ԡ�
�������õľ���ʵ�鷨���÷�ˮ��ָ��㷨�ָ�һ����RGB��HSI�ռ��µ�ͼ��Ȼ��ֱ�����������ƽ���ͼ�������ƽ���ͣ�������ʵ�������ݽ��ж���������
5��1 ��ˮ��ָ��㷨[5]
��ˮ��ָ��������������ѧ��̬ѧ�ġ����������һ�־���ķָ�������������ָ���е������������˾��廯��������Ե�������õ���Ӧ�����ɵķָ�����Ϊ�ȶ�������ʵ��ʱ����ֱ��ʹ��ͼ����ÿ���������ֵ��������������ͼ����ݶ�ֵ�����ݶ�ֵ�Ĵ�С��Ϊ������߶ȵĶ������������Ը��õ����ֳ�������ͬ��������ص�֮��IJ��죬Ȼ����ݶ�ֵ����ʹ���Ƚ��ȳ�(FIFO)���б��浱ǰִ�е����ݲ㼶�������ݶȼ����ɵ͵���˳��������ȱ���ͼ��ֱ��������ϣ���ɷָ
�����õ��Dz�ɫ��ˮ��ָ��������ֱ�Ӷ�3ά��ɫ�ռ�ķָ�������Ӵ������Դ���Ľ϶࣬�����ٶȽ���������������������ѧ��̬ѧ�ķ����ֱ�� RG��RB �� GB 3�� 2 ά��ɫ�ռ����ͼ��ָȻ��������Ϣ�ںϼ����õ����յ�ͼ��ָ���������ļ��㲽������[6]��
��1�������ɫͼ��I��RG�ϵĹ���2άֱ��ͼ(H)��
��2����ֱ��ͼ(H)���и�˹�˲���ƽ����ɫ�ռ�ֱ��ͼ��ͬʱ��ȥ��������ijЩ�ֲ���Сֵ��
��3������˹Ԥ�������ڲ�ɫ�ռ�����Щ��ɢ���С�࣬��ʹ��ͬһ����Ҳ���ܱ�����ռ�������ԡ���ˣ��б�Ҫȥ����Щ��ɫ�ϰ���С�࣬����ЩС��ϲ�Ϊ�ϴ���ࡣ���������̬ѧ�е����ӱ�����(closing)[7]���������еĽṹԪ�صİ뾶Խ��,�����ڵ�С��ͺϲ���Խ�ࡣ��ˣ��ṹԪ�ص�ѡ��Ҳ�Ǻ���Ҫ�ġ�
��4������ˮ��任���ھ������㴦���IJ�ɫ�ռ䡣����ˮ���㷨��RG��ɫ�ռ�ķ���Ͳ����ˣ�ÿһ��ɫ����һ����ǻ��ţ���ʾ��ԭͼ��ĸ���ɫ���Ϊ�ڼ�����ɫ��
��5�����ݲ�ɫ�ռ�RG�ķ��������ɵõ�ԭͼ��I�ķָͬ���������������ٷֱ�Ӧ�õ�RB��GB2��2ά�ռ䣬��ÿ�ν���������ɫ�������͵õ��˻���RG,RB��GB 3��ֱ��ͼ�ķָ�����
��6����3��2ά�ռ�IJ�ͬ�ָ���ʵʩ�ںϣ��õ����յķָ�����
5��2 �������[8]
���ݾ�����������ƽ���ͷ�����˼�룬���ڸ����ķ����������������ǡ���ģ���ôͬһ�����������ƽ���ͱȽ�С����������ƽ���ͱȽϴ���֮�ȱȽ�С����ˣ����ڸ����ķ���������ֵԽС,�����ȷ�Ⱦ�Խ�ߡ�
��ͼ��I ���ָ�ΪK �ࣺI1 ��I2 ,����,Ik ,���ص� p Ҳ��Ӧ�ķ�ΪK �ࣺG1 , G2,����,GK ,�������ƽ������������ƽ���ͷֱ���Ϊ��




���У� f(p)��ʾ���ص� p ����Ӧ�IJ�ɫ�Ҷ�ֵ��һ��Ϊ 3 ά������ ��ʾ��k �����ص��Ӧ��ɫ�Ҷ������ľ�ֵ�� NkΪ��k ������ص�������ǣ�J = SW2/SB2����ij�ֲ�ɫ�ռ䣬ͼ��ָ�Խȷ��J ��ֵ��ӦԽС��
��ʾ��k �����ص��Ӧ��ɫ�Ҷ������ľ�ֵ�� NkΪ��k ������ص�������ǣ�J = SW2/SB2����ij�ֲ�ɫ�ռ䣬ͼ��ָ�Խȷ��J ��ֵ��ӦԽС��
5��3 ʵ�����
��1����RGB��HSI�ռ��µ�ͼ����зָ���÷�ˮ��ָ����������ǻҶ�ͼ��(h7)��ע�⣺�����ռ������ָ�õ�������������ͬ��
��2������һ���õ��ı��ͼ�����뵽�����У������������ƽ���ͼ�������ƽ���ͣ�Ȼ��������ֵ���Ƚ������ռ��µı�ֵ�Ĵ�С����ֵС��˵����ָ�Ч��Ҫ����һЩ����������Լ����������£�
������룺
#include "basics2d.hh"
#include "convert/nrgbhsi.hh"
#include<iostream>
using namespace oln;
int m,n,i,j,k,w,e,ty=0,q=0��
int a[300000][3],tyr[15]={0}, tyh[15]={0};
double swr=0,swh=0,sbr=0,sbh=0,zr[3]={0},pr[15][3]={{0}},ph[15][3]={{0}},ar[15]={0},
ah[15]={0};
int main()
{
int br[300000],bh[300000];
image2d<nrgb_8> orige=load("a14.ppm"); //����ԭͼ��
image2d<int_u8> tyrgb=load("a14-r-h7.pgm"); //����RGB���ͼ��
image2d<int_u8> tyhsi=load("a14-h-h7.pgm"); //����HSI���ͼ��
m=orige.nrows(); //ԭͼ������
n=orige.ncols(); //ԭͼ������
for(i=0;i<m;i++)
{
for(j=0;j<n;j++)
{
br[q]=tyrgb(i,j); //����RGBͼ����ֵ
bh[q]=tyhsi(i,j); //����HSIͼ����ֵ
for(k=0;k<3;k++)
a[q][k]=orige(i,j)[k]; //����ͼ������ֵ
q++;
}
}
for(i=0;i<q;i++)
{
w=br[i];
e=bh[i];
if(w>ty)
ty=w;
for(k=0;k<3;k++)
{
pr[w][k]+=a[i][k];
ph[e][k]+=a[i][k];
zr[k]+=a[i][k];
}
tyr[w]++;
tyh[e]++;
} // ͳ�Ƹ�������ص�
for(i=1;i<=ty;++i)
{
for(k=0;k<3;++k)
{
pr[i][k]=pr[i][k]/tyr[i];
ph[i][k]=ph[i][k]/tyh[i];
}
} //����RGB��HSI����ƽ��ֵ
for(k=0;k<3;++k)
zr[k]=zr[k]/(n*m); //�����ܵ�ƽ����
for(i=0;i<q;++i)
{
w=br[i];
e=bh[i];
for(k=0;k<3;++k)
{
ar[w]+=(a[i][k]-pr[w][k])*(a[i][k]-pr[w][k]);
ah[e]+=(a[i][k]-ph[e][k])*(a[i][k]-ph[e][k]);
}
}
for(i=1;i<=ty;++i)
{
ȫ�ױ�ҵ��������ֳɳ�Ʒ��������ѯ
