ժҪ
����Ʋ���ģ�黯��ƣ��Ա����Ҫ��ѡ��Ͷ������ã�������Ҫ��ʱ���������������ģ�飬���Ҹ����������ƶ���ʽ����Ʒ��������Ĵ�ʽ�ƶ���ʽ����ʽ����ƣ����߶��и��Ե��ص㣬����Ҫ���о�����Ĵ�ʽΪ�������������õĻ����ԣ���Խ�ϡ��繵��������������������ơ��û����˵�����ŵ��Ǿ������õ�Խ�����ܡ�������Ӧ���ܡ���ˤ��������ܲ��߱�ȫ����ͨ������������ʽ̽���������������ܱȽϺá��������̽������˵�����ṹ�⣬���������ƶ����Ʒ�����
����������Ҫ�Ļ������˶����̵���ƣ���ʹ������Ƶ��ٺã��ƶ���ʽû����ƺã���ô������Ҳ����ܺõ�ִ��������ʽ����ʽ���Ĵ�ʽ���ƶ���ʽ����ƹ������Ѿ�������
���Ը����Լ���Ƶ�Ҫ�����ѡ��������αȽ�ƽ���������й��ֵĵ��Σ�����ѡ���Ĵ����ƶ���ʽ�������ƽ��û�й��ֵĵ��Σ���ѡ����ʽ���ƶ���ʽ��������γɽ���״�����ҵ��αȽϸ��ӣ����ѡ����ʽ�ķ�����
����ƿ��Բ������ֿ���ϵͳ����ͨ����λ��ֱ��ͨ�����߶Ի����˽��п��ƻ���ͨ�����ߵ�̨�Ի����˽��п��ơ�
�ؼ��ʣ� ̽������ˣ� ģ�黯��ƣ� �Ĵ��ƶ���ʽ�� �����˵Ŀ���ϵͳ��
Abstract
The design is modular in design so that in accordance with requirements of options and custom configuration, and when needed to facilitate the replacement and add other modules, and is given two mobile forms of design options, that is, tracked and wheeled mobile way of design , Both have their own characteristics, but mainly to crawler-based research and design, it has good mobility in the barrier, the inter-ditch, climbing has obvious advantages. The robot is the greatest advantage of the barrier has a good performance, adapt to environmental performance, Fangshuai impact resistance and have all-terrain capacity. The wheeled robot will detect mobility is better��In addition to detecting robot design the overall structure, but also gives a mobile control ways��
Robot is the most important bodies of the sports chassis design, even the best software design, mobile design means no good, then the robot will not be very good mission. Wheeled, legged, tracked the movement of way in the design process has been given, Can be designed in accordance with the requirements of their own choice if the relatively flat terrain, or a gully of the terrain, can choose to track the movement; If the gully is not flat terrain, on the choice of wheeled mobile way, if formed ladder, and More complex terrain, the best choice legged approach��
This design uses two types of control systems, through the PC directly through the bus to control the robot through the radio or to control the robot��
Keywords�� Detecting robot; modular design��tracked mobile�� robot's control system��
Ŀ ¼
ժҪ �D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�DI
Abstract�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�DII
��һ�¡������D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
1.1 �����˵�Ӧ�÷�Χ�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
1.2 ̽������˵���״����չ���ƨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
1.3 �о����ݨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
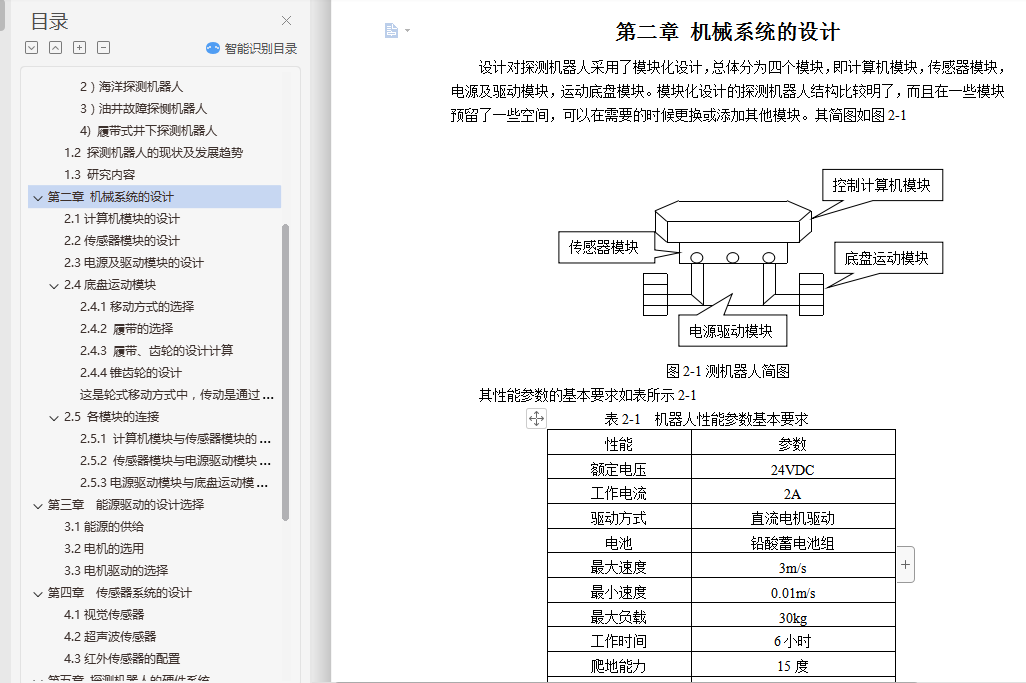
�ڶ��¡���еϵͳ����ƨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
2.1 �����ģ�����ƨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
2.2����������ģ�����ƨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
2.3������Դ������ģ�����ƨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
2.4���������˶�ģ�����ƨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D��
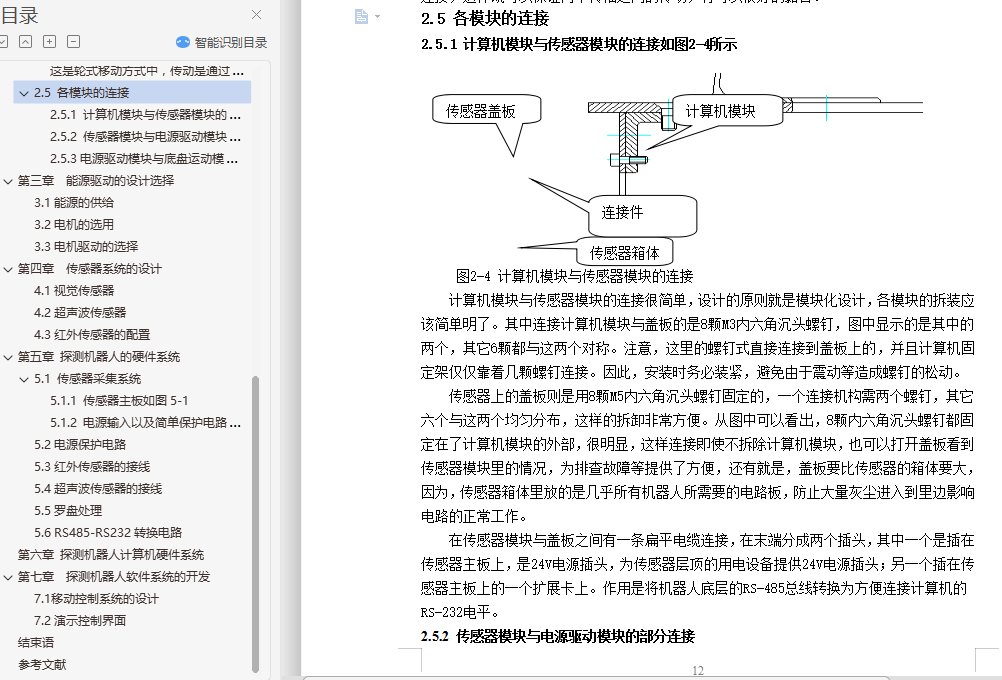
2.5������ģ������ӨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D11
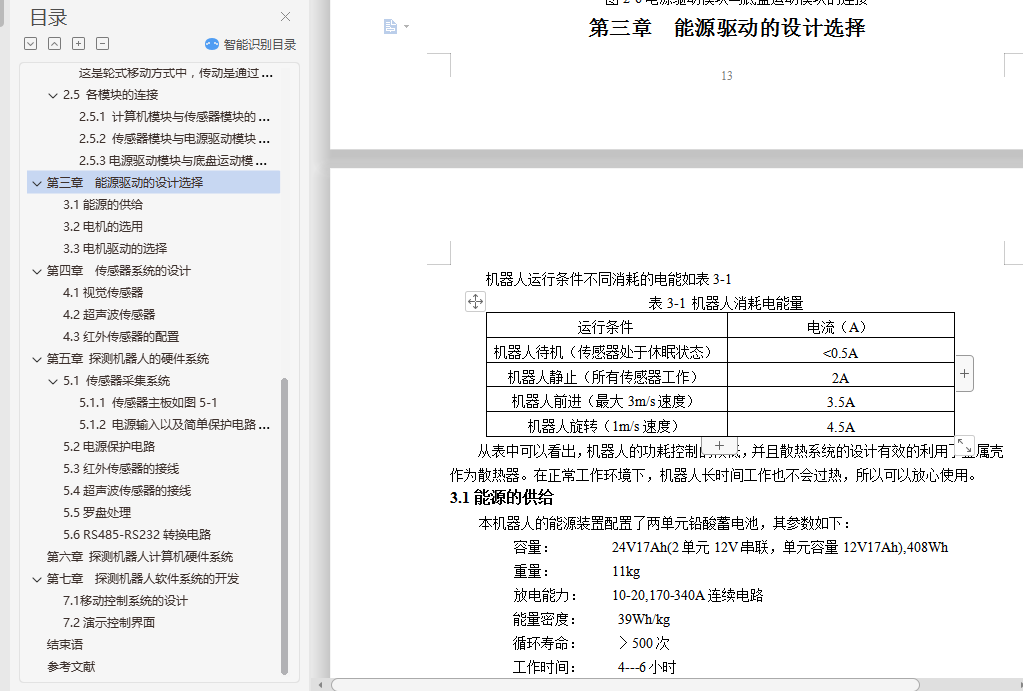
�����¡���Դ���������ѡ��D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D14
3.1 ��Դ�Ĺ����D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D14
3.2���������ѡ��D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D14
3.3�������������ѡ��D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D15
�����¡�������ϵͳ����ƨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D17
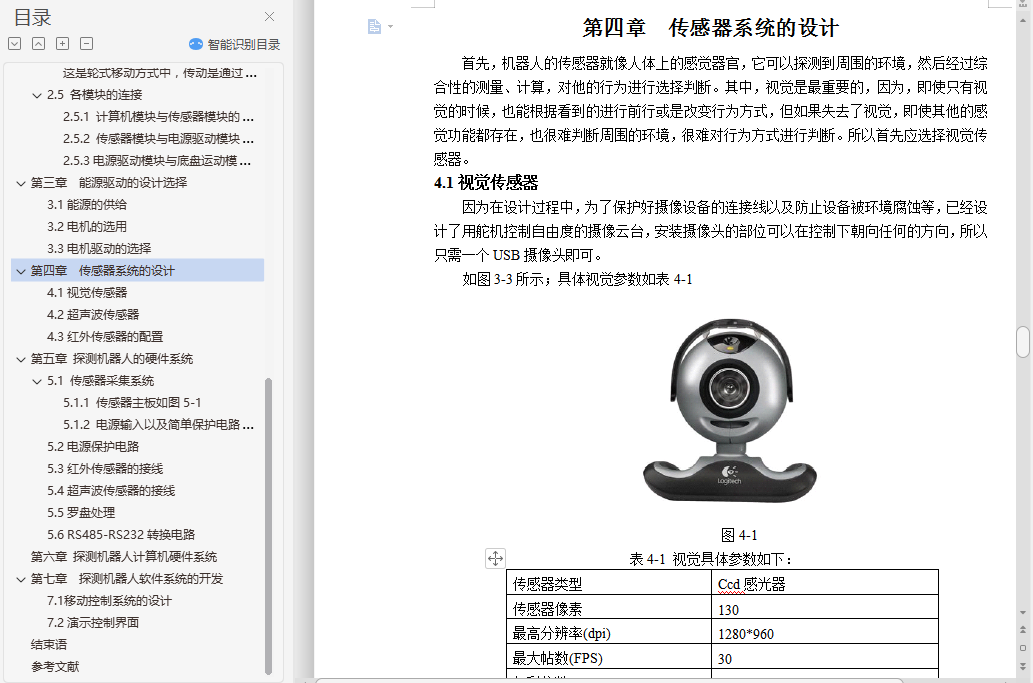
4.1 �Ӿ��������D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D17
4.2�����������������D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D17
4.3������������D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D19
�����¡�̽������˵�Ӳ��ϵͳ�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D20
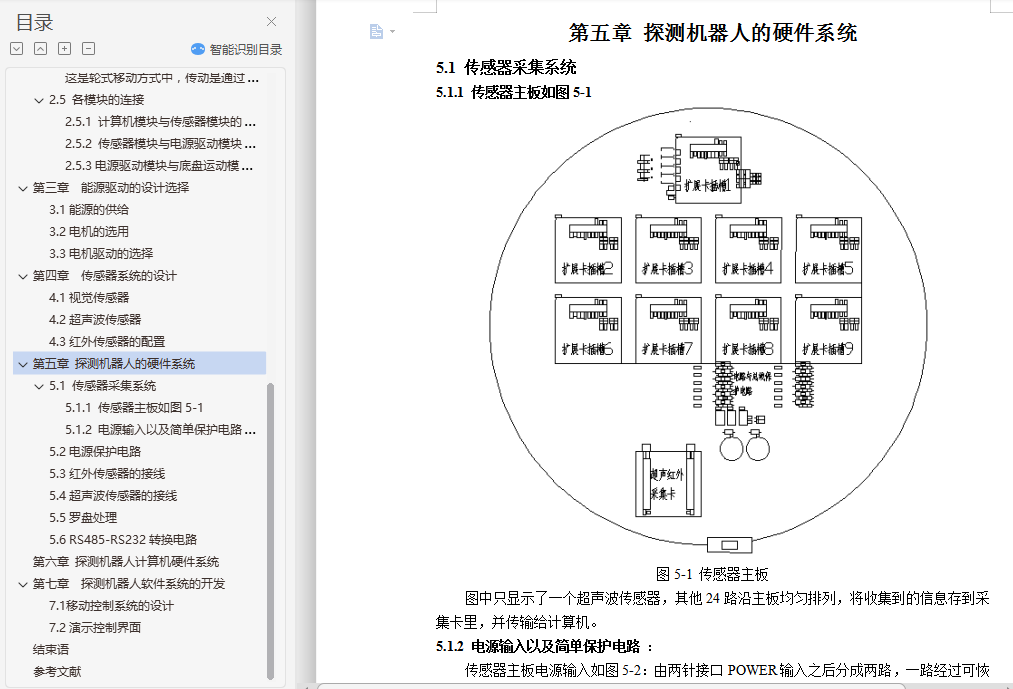
5.1 �������ɼ�ϵͳ�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D20
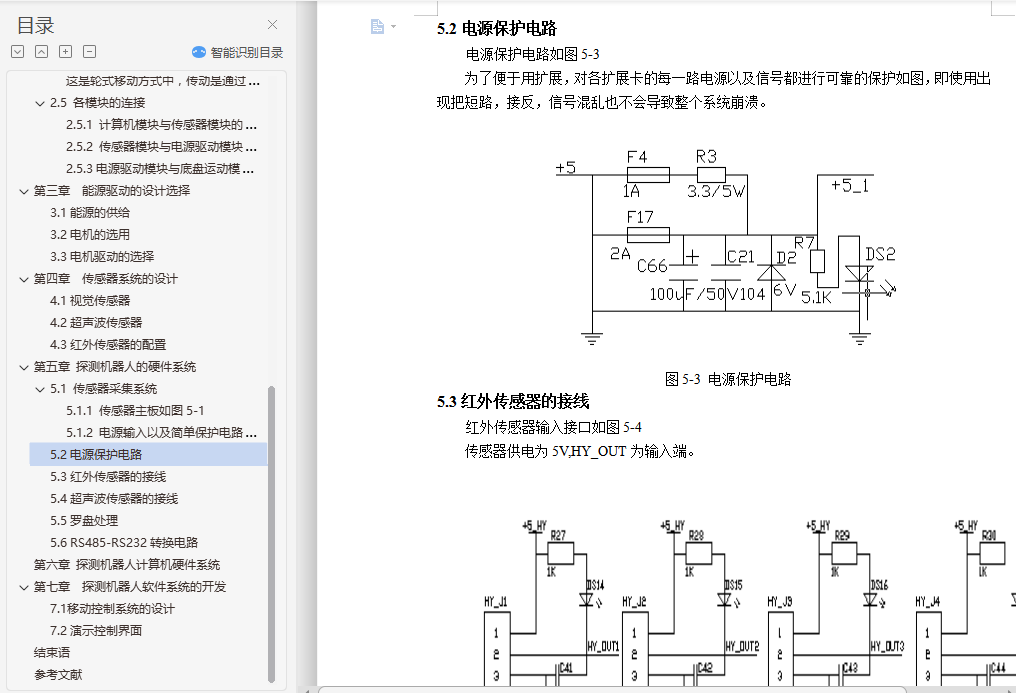
5.2����������·�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D20
5.3������������Ľ��ߨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D21
5.4�����������������Ľ��ߨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D21
5.5�������̴������̨D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D21
5.6����RS485-RS232ת����·�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D22
�����¡�̽������˼����Ӳ��ϵͳ�D�D�D�D�D�D�D�D�D�D�D�D�D�D23
6.1 ���ߵ�̨ͨѶϵͳ�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D23
6.2�����������̨D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D23
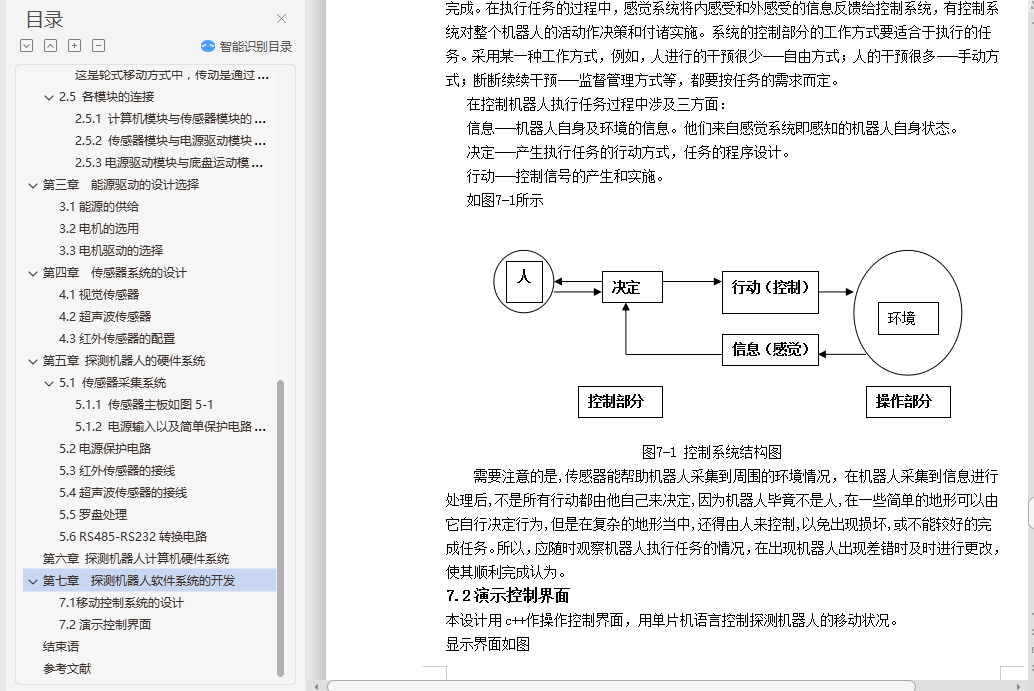
�����¡�̽�����������ϵͳ�Ŀ����D�D�D�D�D�D�D�D�D�D�D�D�D�D25
�ƶ�����ϵͳ����ƨD�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D25
��ʾ���Ƴ���D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D25
����������������D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D29
�ο����ס����������D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D�D30