ew Roman"; font-size: 10.5pt; -ms-text-justify: inter-ideograph;'>[9] SUBBARA0 M��GURUMOORTHY N. Depth recovery from blurred edges[C]//Computer Vision and Pattern Recognition�� 1988. Proceedings CVPR' 88��Computer Society Conference on. IEEE�� 1988��498-503.
[10] ENS J�� LAWRENCE P. An investigation of methods for determining depth from focus[J]��Pattern Analysis and Machine Intelligence��IEEE Transactions on��1993��15(2)��97-108.����
[11] TRIGGS B. Camera pose and calibration from 4 or 5 known 3d points[C]//Computer Vision�� 1999. The Proceedings of the Seventh IEEE International Conference on. IEEE�� 1999�� 1��278-284.
[12] J. F. FERREIRA��J. LOBO�� DIAS J. Tele-3D-developing a handheld scanner using structured light projection[J]. 3D Data Processing Visualization and Transmission�� 2002��788-791.
[13] ��ƽ�����Ӿ�������. �������Ŀ�Ӿ�����ϵͳ[J].��繤�̣�2005��32(12)��90-93.
[14] ����壬 ����һ�� ��־ǿ. �ӵ�վ���ͼ��ȷ���ռ�Ŀ����ά��̬[J]. ��ѧ������ 2002��28 (1)��77-80.
[15] ������, ���·, ���º�. ���ڼ������뵥Ŀ���ϵͳ���о�[J]. �й��Ƽ�����, 2012 (9):111-112.
[16] ׯ��, ��ΰ, ����, ������. �ƶ������˻��ڼ�����͵�Ŀ�Ӿ�������ͬʱ��λ�͵�ͼ����[J]. �Զ���ѧ��, 2005,31 (6):925-933.
[17] �⸣��, ��ռ�� . PnP �������������㷨 [J]. ����ѧ�� , 2003,14(3):682-688.
[18] Horaud R, Conio B, Leboulleux O, Lacolle B. An analytic solution for the perspective 4-point problem[J]. Computer Vision, Graphics, and Image Processing, 1989, 47 (1):33-44.
[19] Christy Se, Horaud R. Iterative Pose Computation from Line Correspondences[J].Computer Vision and Image Understanding, 1999,73 (1):137-144.
[20] Zhang X, Sun X, Yuan Y, Zhu Z, Yu Q. ITERATIVE DETERMINATION OF CAMERA POSE FROM LINE FEATURES[C], International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences, Melbourne, Australia.2012: 81-86.
[21] ������, ����, �ﳤ��. ��Ŀ�Ӿ�λ�˲������������ַ���[J]. ����ѧѧ��, 2011,44 (5):440-444.
���ڵ�Ŀ�Ӿ��������߹���λ��ʶ��
���ⱨ��
1 �о������ı�����������Ŀ��
1.1 ��������
�������������г����Ͷ����ɱ������ӣ�ͬʱ���г�����Ʒ����Ҫ��IJ�����ߣ��������йذ�ȫ���������������������Ͷ����������߷���ij�̨����ҵ�Թ�ҵ�����˵�������ֳ�������ʢ��̬�ơ����ſ�ѧ�������Ϸ�չ����ҵ�������ѹ㷺Ӧ���ں��ա�������ҵ����Ʒ��װ�͵��ӷ�װ�ȹ�ģ����ҵ�У����ǰ������ˡ��ӹ������ӡ���Ϳ����װ���ּ����ڵ��ڶ���ҵ����[1]���Ѿ���Ϊ��߹���Ч�ʡ����������ɱ������ϲ�Ʒ�������ɻ�ȱ����Ҫ���ߡ�

ͼ1.1 ��ҵ������
�����Ӿ����Լ�����Ӿ�Ϊ��������϶����ִ���ѧ������ʵ���ڹ�ҵ����жԿռ�����ߴ�����Ͷ�λ��һ�ż���[2]��ͨ��ͼ�����Կռ��������ά������м�⣬��������Ĵ�С���ƶ�״̬����״�����������п����ԡ����ظ��ԡ����ܻ����ǽӴ����ֳ�����������ǿ���ŵ㡣�����ż�⼼���IJ��Ϸ�չ�������Ӿ������Ѿ��빤ҵ�������������ں�[3]������ʼ����Ӧ���ڰ�װ�������ϣ���ʼȫ���ƹ㡣
1.2 ���о��������Ŀ��
���Ź�ҵ�Զ������ռ������ʹ��Ѿ���Ϊ�ִ���ҵ���ɻ�ȱ�Ĺ��ߡ�ʵ�������У�Ϊ��ʵ���Զ���������������⣬��Ҫ�Դ��ʹ��ϲ�Ʒ��λ�ý���ʵʱ��⡣

ͼ2.1 ���ʹ����Ӿ����
��ͳ�ϣ����������ʶ���붨λ�㷺���õ���˫Ŀ�Ӿ�����������ʶ�����������Ҫ��ϸߣ�ϵͳӲ���ɱ��ߣ�ͼ�����㷨��Ϊ���ӡ�һ��ĵ�Ŀ�Ӿ���ʶ�������λ�ú���̬��Ϣ�������������ߴ��ʹ��ϵ��Ӿ�ϵͳ�����ڴ��ʹ���һ�������ƽ�棬��ػ�����֪����˿��Բ��õ�Ŀ�Ӿ���ʵ�ֲ�Ʒ��ʶ���붨λ�����˫Ŀ�Ӿ�����Ŀ�Ӿ��ṹ������궨���㣬ͬʱ�����ӳ�С������ƥ���ѵȲ��㣬�������װ���ӳ���������������궨�ȷ���Ҳ�нϴ�����ƣ��������о��Ƚϻ�Ծ��
����Ŀ���һ���Ե�Ŀ�Ӿ�Ϊ�����������ߴ��ʹ��Ϲ���λ�ú���̬ʶ��Ĺ���λ�˲���ϵͳ����ʵ���������䱸����ӦӲ��Ϊ��������ҵ����̶���װ���ɻ�ȡ�������ص�RGBͨ��ͼ���������ߴ��ʹ������λ�ò��䣬��Ŀ����Ƶ�Ŀ�Ӿ�λ��ʶ���㷨����ʵ�ֲ��õ�Ŀ������й�����λ��ʶ���������

ͼ1-3 ʵ�����䱸�Ĵ��ʹ��빤ҵ���
2 ��Ҫ�о���������
2.1 ��Ҫ�о�����
���ڵ�Ŀ�Ӿ�����������Ŀ�깤���ھ����ʹ����������Ӿ���ⷶΧ�ڣ���������ɼ�ͼ����PC����ͼ������������ȡͼ����������������ʶ�𣬵�ȷ��ΪĿ�����������ȡĿ�������λ�ú���̬��Ϣ��������ȡ������Ϣ���������˿���������ҵ�����˵�ץȡ���������о���Χ�ڣ�����Ŀ��Ҫ������������е�ʶ�����⣬�漰������ͷӦ�á�ͼ������ͼ��Ӧ�õȷ���ļ��������ָ�ľ����֪����������������Ĵ�����Ϊ�������ڿ�Դ�Ӿ���OpenCv����python���Ի����½��й�����λ��ʶ��
2.2 ����·��
2.2.1 ϵͳ���彨ģ
���ȶ�ϵͳ���в�������ģ������Ŀ�о���ϵͳ���ɹ�ҵ����ʹ��ʹ���ɣ������Ҫ�����Ƿֱ�ģ��
2.2.1.1 �����Ӿ�ϵͳ��ģ���궨
�������ԭ����������ͼ��ʾ�����ģ������ʾ��
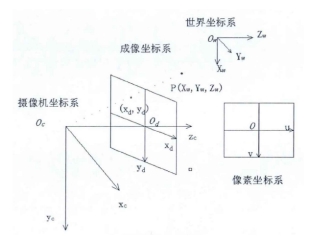
ͼ2-1 �����ͶӰģ��
������������ϵ��
��������ϵ��O��u��v�������ڱ�ʾ�������ȡ������ͼ���ڼ�����ϵij���ͼ���ڼ�����ڱ�ʾΪM*N�ľ�������ÿ��Ԫ�ر�ʾһ�����أ���ֵ��ʾһ��ͼ���еĵ�����ȣ���������ϵ��ԭ��һ��������ͼ�������λ�ã�UV��ֱ���ͼ��ı�Եƽ�С�
��������ϵ��Od��Xd��Yd������������ϵ��X���Y��һ��ֱ�ƽ�������������ϵX��Y�ᣬ��ԭ��Ĭ��Ϊ���������ƽ��Ľ��㣬Oc�㵽����ԭ��Od�ľ����Ϊ���ࡣ
��������ϵ(Ow��Xw��Yw��Zw)������ʵ������ά�ռ��ж����һ��������ϵ���������������λ�ã�������XwYwZw��������ɵ�ֱ������ϵ��P��Xw��Yw��Zw��Ϊ��������ϵ�е�һ�������㡣
���������ϵ(Oc��Xc��Yc��Zc)�����������������ĵ�OcΪԭ�㣬����������᷽��ΪZc�᷽��Xc���Yc���Ǿ���Oc����Zc��ֱ�������ᡣ
�����пռ���һ��P��Xw��Yw��Zw������������ͼ�ı任��ʵ�ִ���������ϵ����������ϵ�ı任���õ���������ϵ�¶�Ӧ�ģ�u��v����
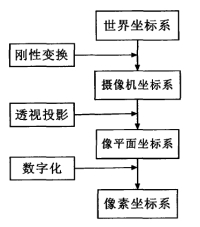
ͼ2-2 �Ӿ�����ϵת������ͼ
���������ϵ����������ϵ֮��Ĺ�ϵ����ƽ�ƾ���t3*1����ת����R3*3�������������ϵ����[4]������
 ��1��
��1��
�����ӹ�ϵ��ͼ����������ϵ�����������ϵ�Ĺ�ϵ�ɱ�ʾ���£�
 ��2��
��2��
���У�fΪ���࣬sΪp�����ࡣ
������������ϵ����������ϵ�Ĺ�ϵ���£�
 ��3��
��3��
���У�dx��dy�ֱ���u��v���������������ؼ�ľ��룬��λmm/pixel��(u0,v0)Ϊ��������������ƽ��Ľ��㣬һ���ڳ���ƽ���е㡣
������1����2����3����ʽ���ɵ�������������ϵ����������ϵ�Ĺ�ϵ[5]��
 ��4��
��4��
ѡ��������ƽ��궨����������������ƽ��ĵ�Ӧ�ԡ���Ҫһ�����̱궨ģ�壬��ͼ2-3��ʾ��������������ͬ�Ƕ���������ͼƬ����ʵ���п�������ñ궨ģ���λ�ã�ֻҪ�䲻�������������Ұ��Χ���궨ģ��ǵ��λ������������ϵ����ͼ������ϵ����һһ��Ӧ�Ĺ�ϵ�����ÿ���ɼ�����ͼ�ɻ��һ��ӳ�������������ڲ���������
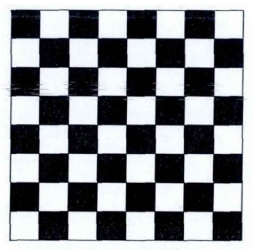
ͼ2-3 ���̱궨ģ��
������������ϵ�еĵ�Pwӳ�䵽��������ϵ��Puʹ�õ���������꣬��ʹ�þ���任����ʾӳ����̣�
Pu=sHPw ��5��
���У�sΪ����ķ���߶����ӣ�H�ɱ�ʾΪ��
 ��6��
��6��
����AΪ������ڲ���������RΪ��ת����tΪƽ�ƾ���R��t��Ϊ������ⲿ��������
���� ��
�� ������
������
����ʽ��5����6���ɵã�
 ��7��
��7��
��Ϊ����������ƽ���Ͽɱ�ʾΪ ������X=
������X= ��BΪ3*3�ĶԳƾ�����Ȼ���κ�һ����Ϊ��ı�����B��Ȼ����ͬһ�������ߡ����
��BΪ3*3�ĶԳƾ�����Ȼ���κ�һ����Ϊ��ı�����B��Ȼ����ͬһ�������ߡ���� �����˶�������������ƽ���ϵ�ͶӰ[6]������
�����˶�������������ƽ���ϵ�ͶӰ[6]������
�
B= ��8��
��8��
����
 ��9��
��9��
�����������B���ٶ�B�������棬������Chofeksi�ֽ⣬�����Ϳɴ����Ƶ���������ڲ���������A����������ͷ�ǹ̶���װ�ڴ��ʹ��Ϸ��ģ������������ڲ����������ᷢ���ı䣬��������ⲿ������������ͼ��λ�õĸı���ı䣬�������������ⲿ��������
2.2.1.2 ���ʹ�ϵͳ��ģ���궨
Ϊ�˷��������������ͼ2-4��ʾ�Ĵ��ʹ����Ӿ�ϵͳ��λ�ù�ϵͼ���Ӿ�ϵͳ����ϵ0v-XvYv�����ڴ��ʹ�ƽ���ϣ����ʹ�����ϵOc-XcYc��ԭ�����Ӿ�ϵͳ����ϵ��ԭ���غϣ���������ϵ��X���н�Ϊ 1��
1��
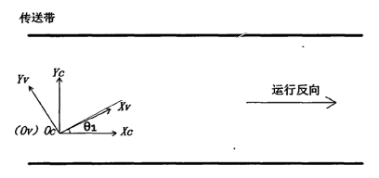
ͼ2-4 ���ʹ����Ӿ�ϵͳλ�ù�ϵͼ
��Ϊ������ǹ̶���װ�ڴ��ʹ������Ϸ������Բ��ÿ����Ӿ�ϵͳ��x���y�����ת��ֻ�迼����Z�����ת����ͼ�пɵó����ʹ����Ӿ�ϵͳ�����λ�ù�ϵΪ������
 ��10��
��10��
���У� Ϊ���ʹ����Ӿ�ϵͳ��z���ϵ�ƫ�ǡ�
Ϊ���ʹ����Ӿ�ϵͳ��z���ϵ�ƫ�ǡ�
2.2.2 ͼ��Ԥ����
ͼ��������ͼ����ǿ��ͼ��ȥ���ͼ��ָ�ȡ�����ͼ���ڻ�ȡ�ʹ�������У���Ϊ������������ϵͳ�����ԭ��ͼ�����������ɱ�����½���ͼ������Ŀ�ľ��Ǿ����ܵؽ�ͼ���������ֳ�������Ŀ��ͼ���Ե��Ŀ��ͼ�����ĵȡ�
2.2.2.1 ͼ����ǿ
ͼ����ǿ��ǿ��ͼ���и���Ȥ���������Ʋ�����Ȥ������Ĺ���[7]�����õ�ͼ����ǿ�ķ����л��ڻҶ����Ա任��ǿ�ͻ���ֱ��ͼ�任��ǿ���Ƚ�������ǿЧ��������Ӧ��ѡ��ֱ��ͼ�任������ͨ����Դ�����Դ��ĺ��������лҶ�ֱ��ͼ���⻯������ͼ��ĻҶ�ֱ��ͼ�ֲ�Խ���ȣ���ͼ���и���Ȥ������������Խͻ������˾���ֱ��ͼ���⻯�������ɸ���ͼ�����������Ա任��������������֤�����ʺ�ͼ��ĺ���������
2.2.2.2 ͼ��ȥ��
ͼ���ڲɼ��ʹ�������У������ܵ���������ĸ��ţ�ʹ��ͼ�������½����������һ�㶼����Ԥ�������źţ���ͼ��Ӱ��ܴ�ͼ��ȥ����ͼ�����еı��뻷��[7]��
����ѡ����˹�˲�����һ������ƽ���˲��������ر������ڰ����и�˹������ͼ��˹�˲��Ĺ���Ϊ������������ͼ����м�Ȩƽ��������ͼ����ÿ�����ص��ֵ���������䱾�����������ڵ���������ֵ������Ȩƽ����õ��ģ�����һ��ģ��ȥɨ��ͼ���е�ÿһ�����أ���ģ�����������صļ�Ȩƽ���Ҷ�ֵȥ����ģ���������ص��ֵ����������ͼ����˵,��˹�˲��������ø�˹�˵�һ����ά�ľ������ӣ��ɱ�ʾΪ������
 ��11��
��11��
��ʽ��11����������˹�ֲ������ж������϶��зǸ�ֵ�������Ҫһ������ľ����ˡ���ʵ��Ӧ���У�һ��ȡ3*3��5*5�ĸ�˹�ˣ���ͼ2-5��ʾ��
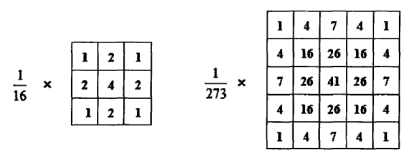
ͼ2-5 ��˹��
2.2.2.3 ͼ��ָ�
ͼ��ָ���ǽ�ͼ���и���Ȥ�������ͼ���з���������Ա���ȡĿ�����������[8]��
ͼ��ָ���㷨�ܶ࣬��û��һ��ͨ�õ�ͼ��ָ��㷨��Ҳ����һ���۱�ȥ����ͼ��ָ��Ƿ�ɹ�����Ŀ�е�Ŀ�����壨�ָ�ľ���ı�Ե��Ϊ���������ѡ����ڱ�Ե����ͼ��ָ����
ͼ���Ե��ͼ�����Ҫ�������ǽ���ͼ��ָ����Ҫ��������Ե��ָ��Χ���ػҶȱ仯�����صļ��ϡ�Ŀǰ�����õı�Ե���������Roberts���ӡ�Sobel���ӡ�Prewitt���ӡ�Laplace���Ӻ�Canny���ӣ������ص㣬���2-1��ʾ������ѡ��Canny���ӣ��ָ�ľ��ͼ���Ե��Ϊ���ԡ�
��2-1���õı�Ե������ӣ���
|
��������
|
����ԭ��
|
�����ص�
|
|
Roberts
|
���þֲ���ֵķ�����ȡ��Ե,����2*2�����м���45�ȷ����һ����
|
�����ں��ж��͵ĵ�������ͼ��
|
|
Sobel
|
��ͼ�����x��y�����ϵIJ��,����������˲�
|
�����������϶��ͼ��ҶȽ����ͼ��
|
|
Laplace
|
��ͼ����ж�����,����㼴Ϊ��Ծ�ͱ�Ե��
|
������ͼ�����ݶ��ͱ�Ե�ļ켫Сֵ�㼴Ϊ�ݶ��ͱ�Ե��
|
|
Canny
|
���ø�˹�˲�����ͼ�����ƽ������,������һ��ƫ����������������ݶȡ�
|
�����������϶ࡢͼ���Ե���Ե�ͼ��
|
2.2.3 ͼ��λ��ʶ��
��ͼ������ֻ�ǽ�Ŀ������ӱ����з����������������û��ȷ��Ŀ�����壬��˻���Ҫ�ӷָ�ͼ���ж�Ŀ���������ʶ��
Ŀǰ��Ŀ�������ʶ����Ҫ�������ࣺ����ƥ�䷨�����ƥ�䷨������ƥ�䷨��ͼ�����Ӧ�Ͽ죬�������������ϲ�ʺ�Ӧ����ͼ����һ�������Ž�С��Ҫ����Ӧ�ٶȿ�ij��ϣ������ƥ�䷨������������ǿ������ͼ�����Ӧ�������ʺ�Ӧ����ͼ����䣬�����Žϴ���Ӧ�ٶ���Ҫ��ij��ϡ�
��Դ��ʹ���Ŀ��������ԣ��䱳����һ����ͼ����Ӧ���ٶ�Ҫ��ϸߣ���˴˴�ѡ������ƥ�䷨��������ƥ�䷨�У����õ������У�ͼ�������ͼ��������ͼ���ܳ���ͼ����С��Ӿ��Ρ������ǵ�ȵȡ�

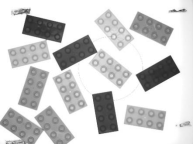
ͼ2-6 ����ڷŵ��ָ�ľ
2.2.3.1 Ŀ��λ�ö�λ
Ŀ�������λ����Ϣһ�����λ������ͽǶȡ�λ�����곣����ָĿ����������ġ��ǵ��������λ�á�
ͼ�����������ɱ�ʾΪ��
 ��
�� ��12��
��12��
ʽ�У�u��v����ƽ�������ԭ��Ϊͼ�����ϽǶ��㣬M��NΪͼ��ij��Ϳ���P��i��j��Ϊͼ�������ֵ��P��i��j������0����1��
2.2.3.2 Ŀ����̬��λ
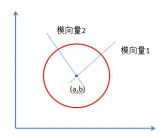
��̬��λ�ķ���ͨ������Ŀ���������״�����������Բ�Σ�����Ҫ����λ���������Բ�Σ�ͨ��Ŀ��������ض����ض������������з���λ��
���������ָ�ľ��������������ʾ�Ǿ��Σ����������Ҳ�����Ǿ��ε����ĵ㣬���ڶ������λ�˹��ơ���������ķ�������ʶ�����ͼ�������е�ԲȦ����ʶ��ԲȦ��������м䣨���������ϣ�����˵������DZ��泯�ϡ���ʶ������ĸ����ϵ�ԲȦ���Լ�������ĸ�����ֱ�ǵ�ʶ�𣬸�������֪ʶ���ָ�ľ�ļ������������Ի�������λ���Լ���̬��
���Ƕ���������ļ���˼·Ϊͨ��������Բ�ļ�Ⲣ��ȷ��Բ�İ뾶����������֪��Ϣ���бȶԣ����ж������档������Բ�任�Ļ���˼·����Ϊͼ����ÿһ���������ص㶼�п�����һ��DZ�ڵ�Բ�ϵ�һ�㣬�������߱任һ����Ҳ��ͨ��ͶƱ�������ۻ�����ƽ�棬����һ���ۻ�Ȩ������λԲ��
�ڵѿ�������ϵ��Բ�ķ���Ϊ��
 ��13��
��13��
���У�a,b����Բ�ģ�r�ǰ뾶��Ҳ���Ա���Ϊ��
 ��14��
��14��
������a��b��r��ɵ���ά����ϵ�У�һ�������Ψһȷ��һ��Բ�����ڵѿ�����xy����ϵ�о���ijһ�������Բӳ�䵽abr����ϵ�о���һ����ά�����ߣ�
ͼ2-7 Բ��ӳ��
����xy����ϵ�����еķ������ص������Բ������abr����ϵ�кܶ�����ά�����ߡ���xy����ϵ��ͬһ��Բ�ϵ����е��Բ������һ���ģ�����ӳ�䵽abr����ϵ�е���ͬһ���㣬������abr����ϵ�иõ��Ӧ����Բ��������N�������ཻ��ͨ���ж�abr��ÿһ����ཻ���ۻ�������������һ����ֵ�ĵ����Ϊ��Բ��
�����DZ�����Բ�任ʵ���㷨���������Ľϴ�Opencv����Բ�任�����������ݶȷ������������ϵ��Ż���ͨ�������ۼ����з�����Ӧ��Բ�ģ���Բ�Ľ��п�������ζ�λԲ���أ�Բ����Բ��ÿ�����ģ�����ϣ����ڴ�ֱ�ڸõ㲢�Ҿ����õ�����ߵĴ�ֱ���ϣ���ЩԲ�ϵ�ģ�����Ľ������Բ�ġ������ݶȷ�����Ҫȥ������ЩԲ�ģ����ݸ���Բ������ģ�����ཻ�����Ķ��٣�������ֵ�������յ��жϡ�ͨ���Բ�ͬ�뾶��Բ������Ͷ���뾶�����ƣ��ָ�ľ�����Բ�뾶�������Ҫ�������ж������档
ͼ2-8 ģ�����ཻ��Բ��
����Canny���ӱ�Ե��ȡ֮��������ͨ��OpenCv�Դ���������Ŀ������������ж�Ŀ��������ϵ���̬������
2.2.4 Ŀ�����
���û����Ӿ�������ȡ���ʹ���Ŀ�������λ����Ϣ����ͨ����ȡ�Ĵ��ʹ����ٶȣ�����Ŀ����������ʱ�̵�λ�á�
֮ǰ��֡ͼ���Ѿ����Ի�ȡ�˶�Ŀ���λ�ã���ʵ���ϴ��ʹ��ϵ�����ԴԴ���ϣ���ͳ�Ľ���취�������������Ƶ�ʣ����ÿ��һ��ʱ������һ�Σ������ַ����кܶ�ˣ����ʱ������������Ŀ�����©�����ʱ����̣������������������紫�ʹ��ٶȱ仯�������µ������������������˿����մ��ʹ��˶�һ���ľ�������������[9]�����ʹ����˶���������С���������Ұ��Χ��
��ͼ2-7�������Ұ��ΧΪM*N�����ʹ�ÿ�ƶ�ds����Ŀ���ƶ�ds���������һ�Ρ���
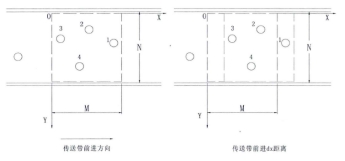
ͼ2-9 Ŀ���������
��ͼ�ֱ��ʾ������������ʱ�̣�ͼ�е�����ϵΪͼ������ϵ��x��y�᷽����ͼ��ʾ������Ŀ����x�����ϵ����Ϊ ���������½��ۣ�
���������½��ۣ�
(1)��ds>M+ ������ͼ���п������˶�������ȫû�б�������㵽����
������ͼ���п������˶�������ȫû�б�������㵽����
(2)��M- <ds< M+
<ds< M+ ����ͼ���п��ܻ���ڲ��������˶����壻����
����ͼ���п��ܻ���ڲ��������˶����壻����
(3)��ds< M- ������ͼ����һ����������������塣����
������ͼ����һ����������������塣����
��(1)��(2)���������֤�ɼ�������ͼ����(3)�������Ȼһ���ܲɼ���������ͼ�����ͼ��ɼ��ļ��̫С��cpu�ļ�������̫��Ӱ��Ч�ʡ���ds= M- ʱ���ɼ�������Ч����ߡ�
ʱ���ɼ�������Ч����ߡ�
����ͼ���п��ܳ�ͬһ���壬��Ҫ���ظ���λ����Ϣ��������Ҫ�ҳ��ظ����壬�����m��ͼ���д���u���˶��������Ϊ����A
A= ��i=1��2��3��u ��15��
��i=1��2��3��u ��15��
�����m+1��ͼ���д���v���˶��������Ϊ����B
B= ��j=l��2��3��v ��16��
��j=l��2��3��v ��16��
������B��ÿ���˶������λ����Ϣ�뼯��A��ÿ���˶������λ����Ϣ���бȽϡ�
 ��17��
��17��
���� �ֱ�Ϊ�˶�����λ����Ϣ��x�ᣬy��ͽǶ������������
�ֱ�Ϊ�˶�����λ����Ϣ��x�ᣬy��ͽǶ������������
��ʱ˵������A������i�ͼ���B�е�����jΪͬһ�����壬�轫����j��λ�ôӼ���B��ɾ�������˶������λ����Ϣ��x�ᣬy���Ƕ��ϳ����˶�Ӧ���������ֵ,���轫���˶������λ����Ϣ������
��ʵ�ʹ����У����ʹ���ʱ���˶��ŵģ���ÿ���ڵ���, ��ͼ���������������д��������տɻ�ȡ���ʹ������������λ����Ϣ��
2.3 �����Է���
Ϊʵ�ֶԴ��ʹ���Ŀ�������λ��ʶ��������ǰ����ܵļ���·��������Ҫ���������ʹ��ʹ��Ľ�ģ�ͱ궨��������ͼ�����ͼ����ǿ��ͼ��ȥ����ͼ��ָ��Ԥ������֮�������ȡ�������������ĵȲ���ȷ�������λ���������������������Ƶ����������������Ƭ�е��ظ����������տ��Եõ����ʹ������������λ����Ϣ��
��1�� ������֤�˶�ͼ������Ԥ�����㷨��
�Բ�������ͼ��ֱ����ֱ��ͼ���⻯�����Ի������������ᆳ���Ի����������˲���ͼ��ȱʧ��������ѡȡ����ROI������������ѡ��ֱ��ͼ���⻯Ԥ�������������Ը���ͼ��Ч����


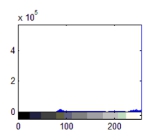
ͼ2-10 RGBԭʼͼ�����Ҷ�ͼ��Ҷ�ֱ��ͼ
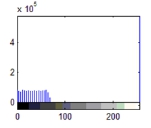

ͼ2-11 ֱ��ͼ���⻯��Ҷ�ֱ��ͼ��ͼ��

ͼ2-12 ֱ��ͼ���Ի�ǰ���ͼ��
��˹�˲��������Ч������ͼ��ʾ��

ͼ2-13 ��˹ģ��ȥ���
�����ָ�ľ�ı�Ե��Ϊ����������Canny������ȡ��Ե��Ч������ͼ��ʾ��

ͼ2-14 ������ȡ
����������ȡ֮��������ͨ��OpenCv�Դ��ĺ�������Ѱ����С��Ӿ�������������������������̬������ع�����
��2�� �ض�������ȡ��������ȡ˳�����⡣
���ǻ��ڱ�Ե��ȡCanny���Ӵ�������ͼ�����ڲ��������ȶ�����ʶ�����е�Բ��������Ӧ�ڱ�Ե��ȡǰ���û���Բ�任��ȡ�������ж������档


ͼ2-15 ��Ե��ȡ���ڲ��������ȶ�


ͼ2-16 ԭͼ�����任��Ȧ��Բ
��3�� ���������״���������ĵȵ��㷨�Ƚϳ��죬λ��ʶ�����ʵ�֣��������ж�Ŀ��������ɼ�������ͼ���Լ����ظ�������㷨Ҳ��������֤������ʵ����
3 ���Ȱ��ż�Ԥ��Ŀ��
3.1 ���Ȱ���
��3-1 ���Ȱ���
|
ʱ��
|
���Ȱ���
|
|
3�·�ǰ
|
��֡ͼ��λ��ʶ�����ʵ��
ʵ�ֻ���python+OpenCv�ķ���ʵ��
|
|
3��15��ǰ
|
������֡ͼ��λ�˸��ٴ���ʵ��
ʵ�ֻ���python+OpenCv�ķ���ʵ��
|
|
4�·�ǰ
4��15��ǰ
5�·�ǰ
5��13��ǰ
|
���ʹ���ֹʱӲ������
���ʹ��˶�ʱӲ������
д��ҵ����ܽᱨ�漰��
�����
|
3.2 Ԥ��Ŀ��
����Ŀ���һ���Ե�Ŀ�Ӿ�Ϊ�����������ߴ��ʹ��Ϲ���λ�ú���̬ʶ��Ĺ���λ�˲���ϵͳ����Ƶ�Ŀ�Ӿ�λ��ʶ���㷨����ʵ�ֲ��õ�Ŀ������й�����λ��ʶ���������
�����
[1] ��־�ܣ����ƾ�����ѩ�_.��ҵ�����˷�չ��״�����Ƶ�.���ֹ��̼���ʦ��ѧԺѧ����2011��07��61-62.
[2] �ٽ���.�Ӿ���������[M].��������е��ҵ�����磬2011.
[3] �μ�.��ҵ�������Ӿ�ϵͳ���о�[D].����������ѧ��2013.
[4] Abutaleb A. Automatic thread holding of gray-level pictures using two dimension entropy[J].Computer��Vision ,Graphics and Image Processing,1989 47(1):22-32.
[5] Boykov Y,V Kolmogorov. An Experimental Comparison of Min-Cut/Max-flow Algorithms for Energy Minimization in Vision. IEEE Trans. PAMI, 2004, 26(9):1124-1137.
[6] �Ź���.���ڻ����Ӿ�����������ߴ���ϵͳ���о�[D].��������ҵ��ѧ,2005, 6:47-50.
[7] �ĵ���,����ʤ.�����ͼ������Ӧ��[M].���ϴ�ѧ���滯2004.
[8] �����飬�����^���Ź�Ԩ.ͼ������ģʽʶ��[M].��ѧ���滯2007
[9] Ik Sang Shin, Sang-Hyun Nam, Hyun Geun Yu. Conveyor Visual Tracking using Robot Vision[J].Florida Conference on Recent Advances in Robotics,2006(5),25(26):1-5
, һ����Ŀ�����ڵ�Ŀ�Ӿ��������߹���λ��ʶ��
����ָ����ʦ�����������Ϳ��ⱨ��ľ�������Ҫ��
��������һ���Ե�Ŀ�Ӿ�Ϊ�����������ߴ��ʹ��Ϲ���λ�ú���̬ʶ��Ĺ���λ�˲���ϵͳ��ʵ���������䱸��Ӧ��Ӳ��������̶���װ���������ߴ��ʹ������λ�ò��䣬��Ŀ����Ƶ�Ŀ�Ӿ�λ��ʶ���㷨����ʵ�ֲ��õ�Ŀ������й�����λ��ʶ�������������Ƶ���������Ҫ�����Ѽ����Ķ���Ŀ�Ӿ���λ��ʶ���������ϵĻ����ϣ���Ŀǰ��������ڵ�Ŀ�Ӿ���ʹ�÷�ʽ������㷨���й����������ܽ���ַ�ʽ���㷨���ص�����ӣ��ʹ��ڵ�����ͷ�չǰ�����з������ر�Դ��ʹ��ϵĹ�����Ŀʶ������������������������Ҫ������������ݣ���1�����Բ��֣����ܵ�Ŀ�Ӿ��ĸ�����ʹ�÷�ʽ�ȣ���Ҫ˵����Ŀ�Ӿ��о�����״�ͼ����ѵ㡣��2�����ⲿ�֣���Ҫ�������ʹ��Ϲ���ʶ��IJ�ͬ��ʽ����Ŀ�Ӿ�Ӧ�õ��������ϵ��ص����ѵ㣬�ӷ������ࡢ�о���״��Ӧ������ȷ��棨Ҳ���Բ��������ķֽڷ�ʽ���ֶ�ڽ�������������Ŀǰ��������Ҫ����ط����ͼ�������������ָ������������ȱ�㡣��3���ܽᲿ�֣���ȫ�Ľ��ж�Ҫ�ܽᣬ�Դ��ʹ��Ϲ���ʶ�����ķ�չ��������Լ��ļ��⡣��4���ο����ף�����Ӧ��Ŀ���������ȷ����������Ҫ�������õIJο������б�ע������ƵĿ��ⱨ��Ҫ��1���������壬Ҫ����ܿ���Ŀ�ġ���������2���о��ƻ�����Ҫ����1��������о����ݣ��о������Ϳ����Է�����2�����ÿ������Ӧ��ָ��������ѵ����ڣ������������Щ����ļ���·�ߡ�3���ƻ����ȡ���3��Ԥ�ڽ����ָ����ҵ�����ɺ��ܹ��õ��ijɹ���
Ŀ ¼
���ڵ�Ŀ�Ӿ��������߹���λ��ʶ��
�������� 5
1 �������� 5
1.1 λ�˲����ĸ��� 5
1.2 ��Ŀ�Ӿ��ĸ���о���״ 5
1.3 ��Ŀ�������� 6
2 �������о���״ 6
2.1 �۽������뽹�� 6
2.2 �ṹ�ⷨ 7
2.3 ����ͼ��Լ���� 7
2.4 ���⸨����෨ 7
2.5 ������֪������λ�˹������� 8
3 �������� 8
����� 9
���ⱨ�� 11
1 �о������ı�����������Ŀ�� 11
1.1 �������� 11
1.2 ���о��������Ŀ�� 11
2 ��Ҫ�о��������� 13
2.1 ��Ҫ�о����� 13
2.2 ����·�� 13
2.3 �����Է��� 22
3 ���Ȱ��ż�Ԥ��Ŀ�� 24
3.1 ���Ȱ��� 24
3.2 Ԥ��Ŀ�� 25
������ 27
1 �������� 27
2 ����ģ��ƥ���˲���Ŀ��ʶ�� 29
2.1Ŀ��ʶ����ģ��ƥ���˲� 30
3��ȷ��ά��̬ʶ���㷨 31
4 ʵ���� 35
5 ���� 47
��л 47
����� 48
����ԭ�� 50
��������
1 ��������
�����Ӿ����Լ�����Ӿ�Ϊ��������϶����ִ���ѧ������ʵ���ڹ�ҵ����жԿռ�����ߴ�����Ͷ�λ��һ�ż���[1]��ͨ��ͼ�����Կռ��������ά������м�⣬��������Ĵ�С���ƶ�״̬����״��������������п����ԡ����ظ��ԡ����ܻ����ǽӴ����ֳ�����������ǿ���ŵ㣬�����㷺��Ӧ���ں��캽����ҽ�Ƽ�⡢����װ�����Զ������ơ�Ŀ������ʶ��������С�
1.1 λ�˲����ĸ���
ʵ��Ŀ����Զ������λ�˲����Ľ����ǻ����Ӿ���һ����Ҫ����[2][2]��λ�˲���ʵ�����Dz����ռ�����������ϵ�������ת�������λ����[3][3]��������λ��ָλ�ã�����������ϵ�����λ�ƣ����ˡ�ָ��̬���������ת�������ռ���ij�������λ�˾��������������ϵ��ѡ��IJο�����ϵ֮��ı任��ϵ[4][4]�������任��ϵ����Ҫȷ����������ϵ�Ͳο�����ϵ���������λ����������������ת�Ƕȣ���λ�˲��������������������ɶȵ���⡣
1.2 ��Ŀ�Ӿ��ĸ���о���״
����ʹ�õ��Ӿ������豸̨���IJ�ͬ���Ӿ������������Է�Ϊ��Ŀ�Ӿ���˫Ŀ�Ӿ�(�����Ӿ�)�Ͷ�Ŀ�Ӿ�(ȫ��λ�Ӿ�)����Ŀ�Ӿ����ǽ�����һ̨�Ӿ������豸�ɼ�ͼ��Ŀ��ļ��γߴ硢λ�˵���Ϣ���в����ķ�����������������˫Ŀ�Ӿ��е��������������ž���(���߳���)��������ƥ������⣬Ҳ������ȫ��λ�Ӿ����������������ܴ�Ļ���[5]����Ŀ�Ӿ��ṹ������궨���㣬ͬʱ���������Ӿ��е��ӳ�С������ƥ���ѵȲ��㣬�������װ���ӳ���������������궨�ȷ���Ҳ�нϴ�����ƣ�����������о��Ƚϻ�Ծ��
���ڵ�Ŀ�Ӿ���λ�˲���ͨ����Ҫ��֪����Ŀ���ģ�͡����ݼ���������ͬ���Է�Ϊ�㡢ֱ�ߺ���������3�ͬ��Ŀ��ģ��[6]�����ڵ�������ģ����Ŀǰ�о����ȵ㣬ȷ��������뱻��Ŀ���������̬[7]������ֱ�ߵ�ģ�Ͷ��ڵ�³����ǿ��������ȡȷ[8]�������ڸ����������ĵ�Ŀ�Ӿ���λ�����о����١�
1.3 ��Ŀ��������
���Ź�ҵ�Զ������ռ������ʹ��Ѿ���Ϊ�ִ���ҵ���ɻ�ȱ�Ĺ��ߡ�ʵ�������У�Ϊ��ʵ���Զ���������������⣬��Ҫ�Դ��ʹ��ϲ�Ʒ��λ�ý���ʵʱ��⡣ʶ����λ���ǻ����������ߵ�һ���dz���Ҫ�����⣬ͨ����Ŀ��Ŀռ䶨λ����˫Ŀ�Ӿ���ʶ��������ʶ�����������Ҫ��ϸߣ�ϵͳӲ���ɱ��ߣ�ͼ�����㷨��Ϊ���ӡ�һ��ĵ�Ŀ�Ӿ���ʶ�������λ�ú���̬��Ϣ�������������ߴ��ʹ��ϵ��Ӿ�ϵͳ�������Ѿ�֪�����ʹ�����ػ�����Ϣ����˿��Խ��е�Ŀ�Ӿ�λ��ʶ�𡣱���Ŀ���һ���Ե�Ŀ�Ӿ�Ϊ�����������ߴ��ʹ��Ϲ���λ�ú���̬ʶ��Ĺ���λ�˲���ϵͳ����ʵ���������䱸����ӦӲ��Ϊ��������ҵ����̶���װ���ɻ�ȡ�������ص�RGBͨ��ͼ���������ߴ��ʹ������λ�ò��䣬��Ҫ��Ƶ�Ŀ�Ӿ�λ��ʶ���㷨����ʵ�ֲ��õ�Ŀ������й�����λ��ʶ���������
2 �������о���״
��Ŀ�Ӿ�����һ̨�Ӿ������豸����С�׳�����Ӿ�ͶӰ��Ϊ���ۻ�������������ļ��γߴ硢λ�˵Ȳ����������ڹ�ҵ���������۲���ϵͳ���ƶ������˱佹����Ӿ�ϵͳ�ȡ���Ե�Ŀ�Ӿ���������������������˴������о������ղ����������ӵ�Լ���������ܽ�Ϊ�������֣�
(1)����ij���Լ�������ÿɵ����������ͨ�����������ȡ����λ�õ�Լ����������Ҫ�����۽������뽹�����۽���[9]����������Ľ���ʹ���崦�ھ۽�λ�ã��õ������Ҫ�������ҵ�ȷ�ľ۽��㣻�뽹��[10][10]����Ҫ���崦�ھ۽�λ�ã�ͨ���궨�����뽹ģ�ͼ��㾰�����Ч�ʸ��ߣ���Ҫ������ȷ�궨�뽹ģ�͡������������ľ۽��궨�нϸ�Ҫ��ʵ���н���ʵ�֡�
(2)������ռ�Լ��[11]���ȱ궨Ŀ��������֮�����Թ�ϵ��Ȼ����ݳ������ۼ���������Ŀռ����꣬������������ͱ�����λ�ù�ϵ���㱻���Ŀռ����ꡣ�÷��������ռ���ȸߡ����ֳ����������㷺Ӧ����ʵ�ʹ��̡���Ҫ�������������Ʒ����������⸨����ࡢ�ṹ�������������״Լ���������ȷ�����
2.1 �۽������뽹��
�۽���Ҫ��������仯�����Ӳ�������Ұ������ٶ��������ƫ��۽�λ��Ҳ��������������뽹��������Ѱ��ȷ�ľ۽�λ�ö����Ͳ���Ч�ʵ����⣬���뽹ģ�͵����궨��Ϊ��Ҫƿ����
ף��ƽ[12]�������һ���µ�������-�غ���ͼ��۽������Բ�����ۺ������������һ���µĵ�Ŀ�Ӿ�����������������Ŀ�Ӿ����������е��뽹��ģ�ͺ;۽���ģ���ں������γ��µIJ���ģ�ͣ����о۽�λ�õIJ�����ʵ����֤���㷨�Ŀ����ԣ�ʵ����֤�����㷨���ȶ��ԺͿɿ��ԡ�
2.2 �ṹ�ⷨ
�ṹ����һ������ʽ��ά�����������ü�����Ϊ��Դ�����㡢�ߡ���ȿɿ��ƵĽṹ�⣬��CCD�������ͼ��ͨ���㷨��ȡ�ṹ����Я���ı��������3D��Ϣ��������Ӵ�������ٶȿ졢�������ḻ�����ƣ������ӳ���Χ���ޣ���Ӧ�����ƶ�ƽ̨�ϡ�
��ƽ[13]�����ʵ�����������⡢��̨�����豸��������ͶӰģ���뼤����Լ��ģ�͵ļ����ߵ�Ŀ�Ӿ�����������ʹ����άλ����Ϣ��֪�ı����ݿ���Ϊ������Լ���ı궨ģ�顣���ü����ʵʱ���Ƶ�����ͷ��Ŀ�����ɨ�裬��������õ�����ͼ��ʵʱ��ȡ�������ϵ�������꣬ͨ�������Ļ���������ͶӰ�ͼ�����Լ������ѧģ�ͽ�2ά����ת��Ϊ3ά���꣬���Ե��Ƶ���ʽ�ؽ�Ŀ�꣬ʵ����ά�Զ�������ʵ�ʵļ��ϵͳ�IJ������ȿɴﵽ0.1~0.05mm��
2.3 ����ͼ��Լ����
���ijЩ������״����Բ�桢Բ�����ض����壬����Ŀ���ϻ��������ߵ��ض���״��־���������ض��ֲ���ʽ�ĺ�����־���ı���Ŀ�꣬�����伸����״��Լ��������ֻ�赥Ŀ�Ӿ��ĵ�����Ƭ����ȷ��Ŀ��Ŀռ���ά��̬��
����������뽹��֮��Զ����1ʱ����ģ�Ϳ���ƽ��ͶӰ���ƣ������[14][14]�����ÿռ�������״Ŀ��ļ�������֪ʶ������ӵ�վ��γ�ǵȹ���豸��ȡͼ��ȷ������ȿռ�Ŀ����ά��̬�ķ����������˶�վͼ�������ƥ�䡣
2.4 ���⸨����෨
�������Ǹ���������[15][15]��ͨ�����Ӽ������ǡ���羭γ����ǵȸ����豸�õ������Ŀ�����Ծ�����Ϣ���ٶ�Ŀ��λ�ý�����⡣������֤�����豸�ܹ�ʵʱ����������������Ч���ݡ�
ׯ��[16]���о������˽ṹ�������ڻ����������ƶ������˵�ͬʱ��λ�͵�ͼ�ؽ����⡣���ڼ�����Ӿ�������ģ�͵IJ�ͬ���ֱ�ʹ�ü�Ȩ����С������Ϸ��ͷǾֲ�������Ʒ���ȡ��άˮƽ�����ϵĻ��������ʹ�ֱ����ı�Ե����������ƶ���������ȱ����֪��ͼ�����ڻ����е����������������ͬʱ������չ Kalman �˲���λ���ؽ����в�ȷ���������Ķ�ά���ε�ͼ�ľ��巽����ͨ����Ӧ����SmartROB-2���Զ��ƶ�����������õ�ʵ���������ݵķ������ۣ���֤������������Ŀ����Ժ�ʵ���ԡ�
2.5 ������֪������λ�˹�������
������Ŀ���϶����֪���������[17,18]����[19][19]���棬�ڵõ���Щ����������������ռ��Ӧ��ϵ��ͨ���������ȷ���������ϵ��ռ�����ϵ֮������λ�˹�ϵ��ʵ�����Ŀ���λ�ˡ����ַ�����Ҫ��Ŀ���һЩ������Ϣ��������������Ŀ�ꡣ
��С��[20]�������һ�ֻ���ֱ��������λ�˹����㷨�������˹��淽��������ά�ռ䳡���дӾ��뷽��滮��Ŀ�꺯����ʹ�ò�ͬ���Ż�������ȷ����ѵ���ת��ƽ�ơ�ʵ��֤���˸��㷨��������³����ǿ���ܹ��õ���ȷ�Ľ����
������[21]�����ʵ����һ�ֻ�������������������ͶӰģ�͵ĵ�Ŀ�Ӿ�λ�˲���������ʹ�ò���������������㣬����������������������ϵ����������ϵ�µ����λ�ù�ϵ��ͬ������������������������ϵ�µ����꣬���õ�Ŀ���ת���Ƕȡ�ͬʱ��������һ����OpenGLͼ����������ַ���ϵͳ�������Ŀ��λ�˵ķ�����㣬���㷨�Ķ�λ���Ƚ�������������ۡ�����ʵ��������������������÷����Ķ�λ���ȴﵽ�ˡ�0.01�㡣
3 ��������
��Թ�ҵ��ˮ�ߴ��ʹ��ϵĹ���λ��ʶ��������˫Ŀ�Ӿ��ṹ����Ӳ���豸�ɱ�����ͼ�����㷨���������֮����Ŀ�Ӿ���������Ϊ����������ͬ�ĵ�Ŀ�Ӿ��㷨������������������Ҳ������ͬ����Ӧ��ʱ����Ҫ�������������Ҫ��
���ʹ���һ�������ƽ�棬��ػ�����֪����������Ŀ�Ӿ����㷨����Լ�����ҵ��ˮ����λ��ʶ�����֮��Ӧ�й�ҵ�����˵�ץȡ�Ȳ��������Ҫ���ʶ�������Ŀ�깤��λ�ý��и��ٺͷ����������ͼƬ��Ӧ�ٶȺ;���Ҫ��ϸߡ�
��Բ�ͬ��Ŀ��ʶ�����������Ҫ�Ե�Ŀ�Ӿ��㷨��������Ż����������������Ӧ�ٶȺ;��ȵȷ����Ҫ��������Ŀ��ߴ���֪ʱ���������ó��ι�ϵֱ�Ӽ���λ�˲������ߴ�δ֪ʱ���������ù��μ��δ����������ۺϿ���2Dͼ��������㡢����ֱ�ߵȶ��ּ������������ںϵ�Ŀ�꺯����ͨ����������Ż����λ�˲�����
�����
[1] �ٽ���.�Ӿ���������[M].��������е��ҵ�����磬2011.
[2] ������.����Ŀ�������ĵ�Ŀ�Ӿ�λ����̬���������о�[D].�й���ѧԺ�о���Ժ(��缼���о���)��2014.
[3] ������������Ǭ.���ڻ����Ӿ�������̨λ�����㷨����[J].���ϿƼ���ѧѧ������Ȼ��ѧ�棬2008��29(3)��17-20.
[4] ��ѩ��. ������Ӿ�����������꼰λ�˺��˶����Ʒ������о�[D].���ϴ�ѧ��2005.
[5] ����.���ڵ�Ŀ�Ӿ����������λ�����о� [D]. �Ͼ����Ͼ����պ����ѧ��2007
[6] ������.����ֱ�ߵ��Ӿ���λ������³�����о�[D].�й���ѧԺ�����Զ����о�����2007.
[7] �����ܣ���ϲ�����ŷ�����.����������Ŀռ�Ŀ����άλ�˵�Ŀ�Ӿ�ȷ���㷨[J].�й���ѧ����Ϣ��ѧ��2010��(4).
[8] ������������⣬������.һ�ֻ���ֱ�������ĵ�Ŀ�Ӿ�λ�˲�������[J].����ӣ����⣬2010��(6)��894-897.
