摘 要
本次设计的是是为搬运机械手腕部结构设计及仿真分析。搬运机械手是工业生产的必然产物,它是一种模仿人体上肢的部分功能,按照预定要求输送工件或握持工具进行操作的自动化技术设备,对实现工业生产自动化,推动工业生产的进一步发展起着重要作用。因而具有强大的生命力受到人们的广泛重视和欢迎。实践证明,工业机械手可以代替人手的繁重劳动,显著减轻工人的劳动强度,改善劳动条件,提高劳动生产率和自动化水平。工业生产中经常出现的笨重工件的搬运和长期频繁、单调的操作,采用机械手是有效的。此外,它能在高温、低温、深水、宇宙、放射性和其他有毒、污染环境条件下进行操作,更显示其优越性,有着广阔的发展前途。
本课题通过应用AutoCAD 技术对机械手进行腕部结构设计和仿真,运用Proe技术对上料机械手进行三维实体造型,并进行了运动仿真,使其能将基本的运动更具体的展现在人们面前。它能实行自动上料运动;在安装工件时,将工件送入卡盘中的夹紧运动等。上料机械手的运动速度是按着满足生产率的要求来设定。
关键字:机械手,手腕部;结构设计AutoCAD,Proe
Abstract
This design is for the handling manipulator wrist structure design and simulation analysis.The handling manipulator is an inevitable product of industrial production. It is a part of function imitating the upper limb of the human body. It is an automatic technical equipment which can carry out the operation of the workpiece or the holding tool according to the predetermined requirements, so as to realize the automation of the industrial production.The further development of industrial production plays an important role.Therefore has the formidable vitality to receive people's widespread attention and welcome.It has been proved that industrial manipulator can replace the heavy labor of human hands, reduce the labor intensity, improve the working conditions, and improve the productivity and automation level of the workers.Frequent in industrial production In addition , it can operate under the conditions of high temperature , low temperature , deep water , cosmic , radioactive and other toxic and polluting environment , showing its superiority and broad prospect .
This subject applies AutoCAD technology to carry on the wrist structure design and the simulation to the manipulator, uses the Proe technology to carry on the three-dimensional solid modelling to the feeding manipulator, and has carried on the motion simulation, enables it to be able to display the basic motion more concretely in front of the people.It can carry out automatic feeding movement, clamping movement of workpiece into chuck when installing workpiece.The speed of the feeding manipulator is set to meet the requirements of productivity.
Keywords: manipulator, wrist; structural design AutoCAD Proe
目 录
摘 要 I
Abstract II
1绪论 1
1.1选题背景及意义 1
1.2机器人组成 1
1.2.1驱动装置 1
1.2.2控制系统 2
1.2.3执行机构 2
1.3研究内容 3
2 搬运机械手腕部设计及介绍 4
2.1机器人分类 4
2.1.1按用途分类 4
2.1.2按控制形式分类 4
2.1.3按驱动方式分类 4
2.2腕部结构选型 5
2.2.1单自由度手腕 6
2.2.2两自由度手腕 6
2.2.3三自由度手腕 8
2.2.4搬运机械手腕部结构腕部结构选型 8
2.3机器人设计 10
3搬运机械手腕部末端执行器 11
3.1夹持器 11
3.2拟手指型执行器 11
3.3吸式执行器 12
4搬运机械手腕部设计 13
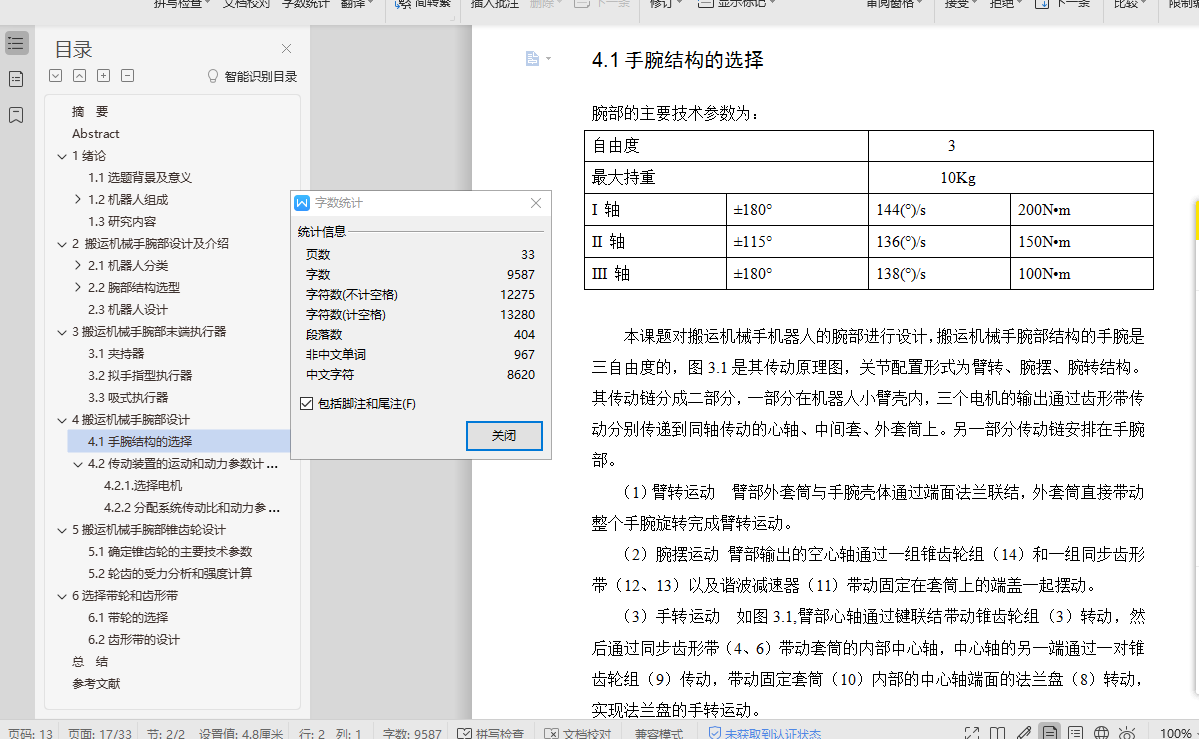
4.1手腕结构的选择 13
4.2传动装置的运动和动力参数计算 14
4.2.1.选择电机 14
4.2.2分配系统传动比和动力参数的计算 16
5搬运机械手腕部锥齿轮设计 21
5.1确定锥齿轮的主要技术参数 21
5.2轮齿的受力分析和强度计算 21
6选择带轮和齿形带 24
6.1带轮的选择 24
6.2齿形带的设计 25
总 结 28
参考文献 29