台球机器人设计
摘要: 本文对台球机器人进行研究和设计。完成了台球机器人的移动机构、回转机构、抬升机构、倾斜机构、击球机构的虚拟装配,设计了一种基于单片机的台球机器人的控制系统。该机器人能够完成自由行走,360 度整圆旋转,平稳升降、倾斜,击球并复位等动作,满足台球运动所需要的各种运动形式,有趣、实用。
关键词:台球机器人 控制系统。
1 文献综述
通过对中国机器人发展现状分析,目前,我国机器人产业正处于蓬勃发展的状态,各类机器人正快速发展。工业机器人作为制造业皇冠顶端的明珠,其性能优势决定了其在工业生产中的优势地位。
目前,在机械加工与电子电气等行业生产中,工业机器人的批量使用,使生产流程工序自动化、简洁化,显著降低了生产成本,提高了生产利润【1】。同时,作为智能制造的主力军,工业机器人不断从汽车制造领域向机械、建材、物流、食品乃至航空、航天、船舶制造等领域渗透,带动相关产业的发展。
在当今科技发展水平之下,各种类型的机器人已经深入人们生产、生活的方方面面,机器人在现代生产生活中的应用领域不断扩宽,其种类也日益增多【2】。根据不同的分类方法,可以对机器人进行不同的分类,如,根据其功能可以分为操作机器人、移动机器人、信息机器人、人机机器人【2】。然而,却鲜有对台球机器人的研究。台球机器人可以达到寓教于乐的目的,很好地帮助人了解台球的基本击打技巧,通过遥控器控制机器人的各个活动,完成走位,瞄准,出杆,击打等各个动作,十分好玩有趣。
国际机器人联合会(IFR)曾预测:“机器人革命”将创造数万亿美元的市场,从而带动与机器人相关的新材料功能模块、感知获取与识别、智能控制与导航等关键技术与市场快速发展【3】。此外,机器人在医疗、餐饮服务等方面的应用,也提高了人们的生活质量,便捷了人们日常的生产生活。在我国人口红利减弱的背景下,随着产业转型升级的不断深入,机器人应用范围越来越广,我国机器人产业将迎来战略发展黄金期【3】。
2 选题背景及其意义
台球源于英国,它是一项在国际上广泛流行的高雅室内体育运动,是一种用球杆在台上击球、依靠计算得分确定比赛胜负的室内娱乐体育项目【4】。台球运动据说是大约在14 世纪,由伦敦一家名叫Billsyard 的当铺老板为娱乐消遣而发明的,台球的英文名称即源于此。至18 世纪末,台球作为一种游戏在英国民间很是盛行。19 世纪初,世界上第一个公共台球室在伦敦开设【4】。
台球运动作为当今新兴的体育运动项目,如今在世界范围内越来越受欢迎。从前台球作为一种优雅的绅士运动,在我国并未受到重视。我国体育界对台球逐渐重视到现在将近30年,然而我国台球运动员却取得了惊人的成绩,2005年,年仅18岁的丁俊晖在世界斯诺克职业排名赛中获得冠军,这一比赛之后在全球范围内掀起了台球热【5】。
在当今科技发展水平之下,各种类型的机器人已经深入人们生产、生活的方方面面,机器人在现代生产生活中的应用领域不断扩宽,其种类也日益增多。根据不同的分类方法,可以对机器人进行不同的分类,如,根据其功能可以分为操作机器人、移动机器人、信息机器人、人机机器人。机器人不仅在“自动化”方面取得了很大的成就,其在“智能化”方面也已达到了较高的水平。然而,却鲜有对台球机器人的研究【6】。
通过对台球机器人发展现状分析,台球机器人可以达到寓教于乐的目的,很好地帮助人了解台球的基本击打技巧,通过遥控器控制机器人的各个活动,完成走位,瞄准,出杆,击打等各个动作,十分好玩有趣。
3 研究内容
模仿人类打台球,可知,台球机器人需能够完成自由行走、360 度整圆旋转、平稳升降、倾斜、击球并复位等动作,满足台球运动所需要的各种运动形式。并且需要设计台球机器人的控制系统。
移动机构:用于完成机器人的直走与转向。
旋转机构:整个底板可以实现360 度的整圆旋转,使得机器人具有更大的工作范围。
升降机构:使得机器人在上升或者下降时能够有很好的稳定性。
倾斜机构:这时使得球杆取得一个击球角度,使之能够更好的击球
击球机构:使球杆能在所需力的范围下击打出去
控制系统:以上各个机构均与控制机构连接,并由控制机构实现控制,实现机器人的整体前行,转弯,停止,旋转,升降,击打等动作,台球机器人整体控制模式。
4方案设计
4.1 移动系统设计
移动机构包括底座1,以及接于底座1 的两只前轮51 和两只后轮50。前轮51 为定向轮,后轮50 为驱动轮,两只驱动轮分别独立地与减速器以及直流电机连接。直流电机通过齿轮驱动后轮50 旋转,减速器用于控制后轮50 转速的变化。当直流电机正转或者反转时可以实现机器人的前进和后退;当减速器控制两只后轮50 产生速度差时,即使得机器人整体实现转向的目的。
(直流电机具有响应快速、较大的起动转矩、从零转速至额定转速具备可提供额定转矩的性能,因此直流电机可提供稳定的转速,可保证后轮的稳定运动。)
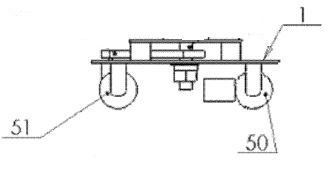
图1
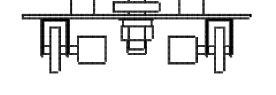
图2
4.2旋转机构设计
实现相对底座1 的转动。具体而言,底座1 上固定有起支撑作用的固定板3,与底座1以及固定板3 转动连接的转轴7,底板9 与转轴7 固定连接,且底板9 通过深沟球轴承6 转动支撑在固定板3 上。底座1 上固定有电机,电机与转轴7 之间通过同步带16 连接,当电机正转或者反转的时候,通过同步带16 以及转轴7 可以带动底板9 的转动,进而带动底板9 之上整个机械和底板9 一同进行转动,整个底板9 可以实现360 度的整圆旋转,使得机器人具有更大的工作范围。
(旋转动力机构包括电机以及连接在电机与转轴之间的同步带。)

图3
4.3升降机构
当两根线性推杆20 同时伸长或者缩短时,可以控制机器人的上半部分上升或者下降,采用前后双推杆的方式,使得机器人在上升或者下降时能够有很好的稳定性。
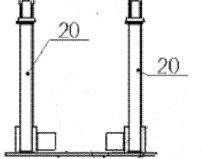
图4
4.4倾斜机构
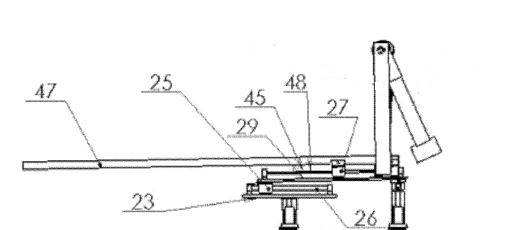
机构的连接:两线性推杆的顶部分别于与顶板29 、连接板23 转动连接。连接板23 上固定有第一滑杆26,第一滑杆26 上滑动有第一滑块25,第一滑块与顶板29 转动连接,顶板29上有第二滑杆45,第二滑杆上有第二滑块27,第二滑块与球杆47转动连接。第二滑块27 安装了用于固定球杆47 的托架,这样球杆便可以通过第二滑块27 的带动来前后移动。
当两根线性推杆20的长度存在差异时,第一滑块25 在第一滑轨26 上滑动,从而使得顶板29 以及机器人的上半部分相对底座产生倾斜角度,顶板29 能够取得一个角度,这时使得球杆47 也取得一个击球角度,使之能够更好的击球。
第二滑杆45 的端部与第二滑块27 之间设置有弹簧48。当球杆47 击打球后,弹簧47 通过自身弹力的回复可推动第二滑块27 以及球杆47 回到原位。
4.5击打机构
顶板上固定有立杆32,立杆32 上转动设置有榔头41 ;顶板上安装固定有一个高速电机36,高速电机36 通过皮带37 连接到一个电离合器33,进而带动可分离地连接在电离合器33 上的轴,榔头41 即与该轴固定。当电离合器33 通电时,轴转动,带动固定在轴上的榔头41 升高,当电离合器33 断电时,榔头41 在重力作用下转动,进而击打球杆47。调整电离合器33 的通电时间,即轴的转动时间可以控制榔头41 的高低,从而来控制击球力的大小。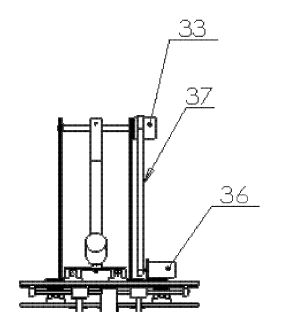
图5
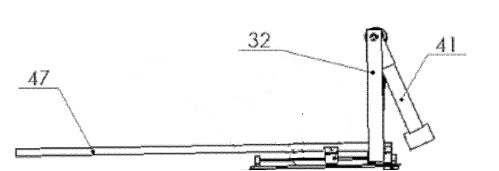
图6
4.6控制系统设计
台球机器人的电源采用24V 输出电压的蓄电池为直流电机供电 。以上各个机构均与控制机构连接,并由控制机构实现控制,实现机器人的整体前行,转弯,停止,旋转,升降,击打等动作。
图7

图8
5 论文工作量及预期进度
2017年12月---- 2018年1月:收集资料,完成课题背景研究及文献综述。
2018年2月: 确定设计系统总体方案,书写开题报告。
2018年3月: 各个机构的选择和设计。
2018年4月: 台球机器人整体布局的设计、电气控制的设计。
2018年5月: 编写毕业论文,毕业答辩准备和答辩。
参考文献:
[1] 曲道奎.中国机器人产业发展现状与展望[J].中国科学院院刊,2015,30(03):342-346+429
[2] 马光,申桂英.工业机器人的现状及发展趋势[J].组合机床与自动化加工技术,2002(03):50-53.
[3] Heider, E.R.& D.C.Oliver. industrial robot.[J]. Foreign Language Teaching and Research, 1999, (3): 62 67.
[4] 辛绍杰.台球机器人. CN 102416266 B. 2013.11.13.
[5] 洪亮.台球运动发展现状及对策.新教育时代.2015年第18期.
[6] 吴波.周云龙.台球机器人现状及发展趋势简析.科技信息.2010年25期:461~479.
[7] Elfes.A.Using Occupy grids for mobile robot perception and navigation. J.Computer.1989.22(6):46-57.
[8] 吴广玉.姜复兴.机器人工程导论.哈尔滨工业大学出版社.1988.
[9] 周远清.张再兴.智能机器人系统.北京:清华大学出版社.1989.
[10] 成大先.机械设计手册[M].第4版.北京:化学工业出版社.2002
[11] 金清肃主编.机械设计课程设计.华中科技大学出版社.
[12] 辛绍杰 蔡业彬王君玲主编.机械设计.华中科技大学出版社.
[13] 何铭新 钱可强 徐祖茂主编.机械制图(第6版).高等教育出版社.
[14] 王英凯,郑成龙,孙玉鑫等.机械设计图册[M].上海科学技术出版社.1979.6.
徐颓.机械设计手册(第5卷).北京:机械工业出版社,1992.
