基于单片机的电动助力转向系统控制系统设计
摘要
我国汽车行业正处于快速发展阶段,汽车正成为对中国宏观经济最有影响力的产业之一。安全、环保和节能等领域将是汽车未来发展的方向。
汽车液压转向助力(HPS)系统体积大、能耗高和智能性差。与相比HPS,电
动助力转向(EPS)系统有体积小、效率高、装配简单和智能性好等特点,是汽车
电子系统的一个主要发展方向。本文分析了EPS系统的特点,研究开发了EPS系统的两个关键电子元件:非接触式扭矩传感器的信号处理、调零电路和电子控制单元(ECU)。
非接触式扭矩传感器的主要功能是将扭矩转角信号转换为Ecu可接收的电压
信号。本文分析了非接触式扭矩传感器的机械特点,首先设计了其信号处理电路;
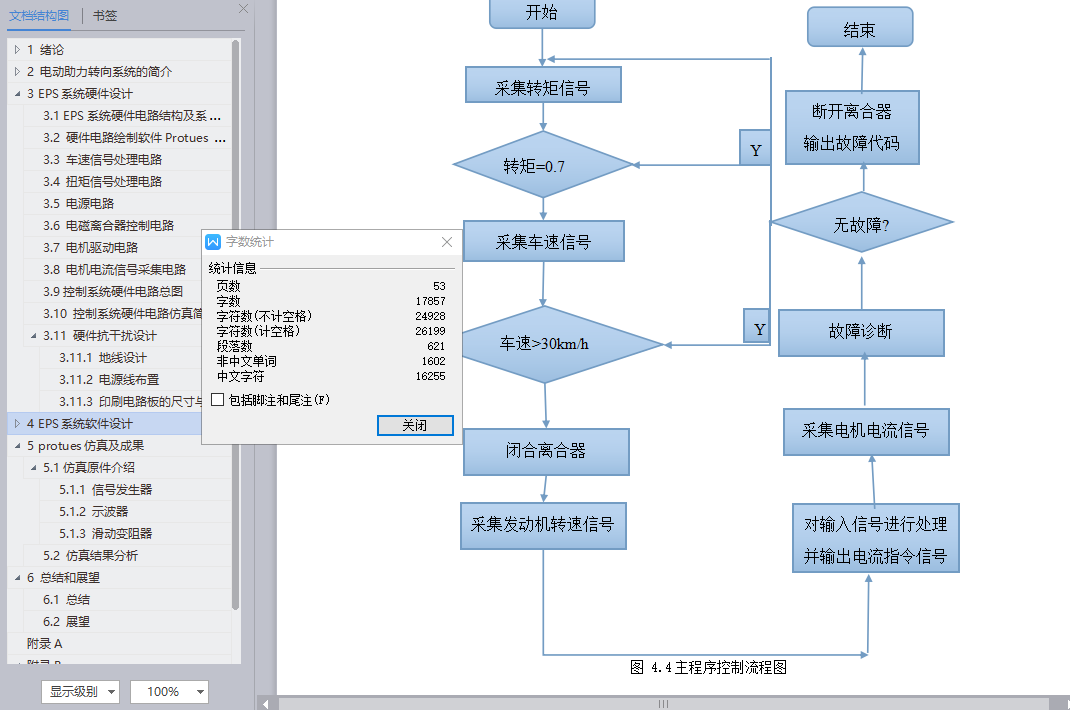
其次,考虑到信号处理电路在配合机械结构时需要调整,开发了以PICl6F676微处理器为核心的自动调整电路及其配套软件,实现了信号处理电路的自调整。ECU是EPS系统的核心,用来完成实时信号采集、电机控制和系统控制功能。本文设计的基于PICl6F877为微处理器的ECU功能如下:对输入信号(转矩、车速及其他信号)进行硬件处理,输入到微处理器,而后微处理器通过计算和分析,确定助力策略,采用模糊参数自整定PID控制算法、通过由PWM驱动的H桥电路对永磁直流助力电机进行控制。本文首先按照功能模块完成ECU的硬件部分,而后基于该电路结构,依照软件模块化思想开发了的控制软件的主程序、信号采集处理模块、电机控制模块和故障诊断模块。
最后,本文首先用自主设计装置对非接触扭矩传感器电路部分进行测试,而将ECU和扭矩传感器信号处理电路加入EPS系统,通过专用EPS测试台进行台架实验。实验表明,二者配合良好,相应快速,工作稳定,可良好实现助力。
关键词:电动助力转向系统,非接触式扭矩传感器,自动调整电路,电子控制单元
Electric power steering system based on single chip microcomputer control system design
ABSTRACT
The auto industry is becoming one of the most important industries in China.The direction of its development should be save,environmental一friendly and energy-saving.Compare to the big,high一energy consuming and unintelligent hydraulic power steering(HPS)system,electrical power steering(EPS)system is more competitive with the advantages of smaller more efficient,simple assembling and more intelligent.The thesis analysed the charactors of the EPS system and designed 2 important parts in the system:signal processing and adjusting circuit for non-contact torque sensor and electrical control unit(ECU).
The non-contact torque sensor’s main function is to transform the torque into Voltagesignal.After the analysis of the mechanical part,the signal processing circuit was made.Considering the circuit should match the mechanical part with both deviations,an adjusting circuit based on PICl6F676 microcontrol unit(MCU)was designed to adjust the circuit automaticly.Also,the software for this circuit was finished.
The ECU,which is designed for signal input,motor control and system control,is the core of EPS.An ECU based on PIC16F877A MCU was made with the following
functions:first,deal with(e.g.filter)the output of the sensor’s(e.g.torque sensor) using
hardware and send them to MCU;then,the MCU decide t0 use which power assisting
rule and how much the assisting force should be after computation and analysis;finally,PWM generated by the MCU drive H-bridge circuit to control the permanent magnet DC motor using fuzzy self-turning PID control algorithm.After the hardware design,the
software part was finished according to the modularize idea.These modules are main function,signal collecting part,motor control part and fault diagnosis part.
After the design part,a non-contact torque sensor test and an EPS system test concluding non.contact torque sensor and ECU was made.The results showed that the
Both part is up to the EPS standard with rapid responding and stability.
Key words:Electrical Power Steering(EPS),Non-contact Torque Sensor,Adjusting
Circuit,Electrical Control Unit(ECU)