摘 要
本文设计并实现了一个基于卷积神经网络的非图像手势识别控制系统,该系统利用MPU6050陀螺仪实时采集时间序列的加速度传感器数据,通过一维卷积神经网络(1D CNNs)对用户手势动作进行识别。该系统旨在解决传统图像手势识别方法在低光照、复杂背景等环境下识别不准确的问题。
设计采用了STM32F103CBT6作为主控芯片,实现了手势数据的采集、处理与识别,以及基于识别结果对外部设备的控制。系统集成了射频遥控和蓝牙通信模块,能够识别包含10种手势的手势库,如特定字母和数字,且正确识别率控制在90%以上。此外,系统还具备高度的可扩展性,用户可以根据需要添加新的手势或功能模块。本研究不仅提高了手势识别的准确性和适应性,也为非图像手势识别技术的应用提供了新的思路和方法。
关键词:卷积神经网络(CNN);非图像手势识别;时间序列数据;MPU6050陀螺仪;STM32
Abstract
In this paper, a non-image gesture recognition control system based on convolutional neural network is designed and implemented. This system uses MPU6050 gyroscope to collect time series acceleration sensor data and identify the user gesture action through one-dimensional convolutional neural network (1D CNNs). The system aims to solve the problem of inaccurate recognition of traditional image gesture recognition methods in low illumination and complex background environment.
The design uses STM32F103CBT6 as the master chip to realize the acquisition, processing and recognition of gesture data, and the control of external devices based on the recognition results. The system integrates the RF remote control and Bluetooth communication module, which can recognize the gesture library containing 10 gestures, such as specific letters and numbers, and the correct recognition rate is controlled at more than 90%. In addition, the system is highly scalable, allowing users to add new gestures or function modules as needed. This study not only improves the accuracy and adaptability of gesture recognition, but also provides new ideas and methods for the application of non-image gesture recognition technology.
Key words: convolutional neural network (CNN); non-image gesture recognition; time series data; MPU6050 gyroscope; STM 32
目 录
摘 要
Abstract
第1章 绪论
1.1 研究背景与意义
1.2 国内外研究现状
1.2.1国内研究现状
1.2.2国外研究现状
1.3 研究内容与目标
1.3.1研究内容
1.3.2研究目标
1.4 论文结构安排
第2章 相关理论基础
2.1 卷积神经网络(CNN)概述
2.1.1 CNN的核心组件
2.1.2 CNN的关键操作
2.1.3 CNN的应用与优势
2.1.4 CNN的公式推导
2.2 一维卷积神经网络(1D CNNs)原理
2.2.1 1D CNNs的核心结构
2.2.2 卷积操作
2.2.3 激活函数
2.2.4 应用场景
2.2.5 1D CNNs的公式推导
2.3 MPU6050陀螺仪工作原理及数据采集
2.3.1 工作原理
2.3.2 数据采集
2.4 STM32微控制器简介
2.4.1 基本特性
2.4.2 系列划分
2.4.3 外设资源
2.4.4 应用领域
2.5 红外通信技术
2.5.1 红外通信原理
2.5.2 红外通信的应用
2.6 卡尔曼滤波算法原理及公式
2.6.1卡尔曼滤波算法原理
2.6.2卡尔曼滤波核心公式
2.6.3算法特性与应用
第3章 算法实现
3.1 手势识别定位程序设计
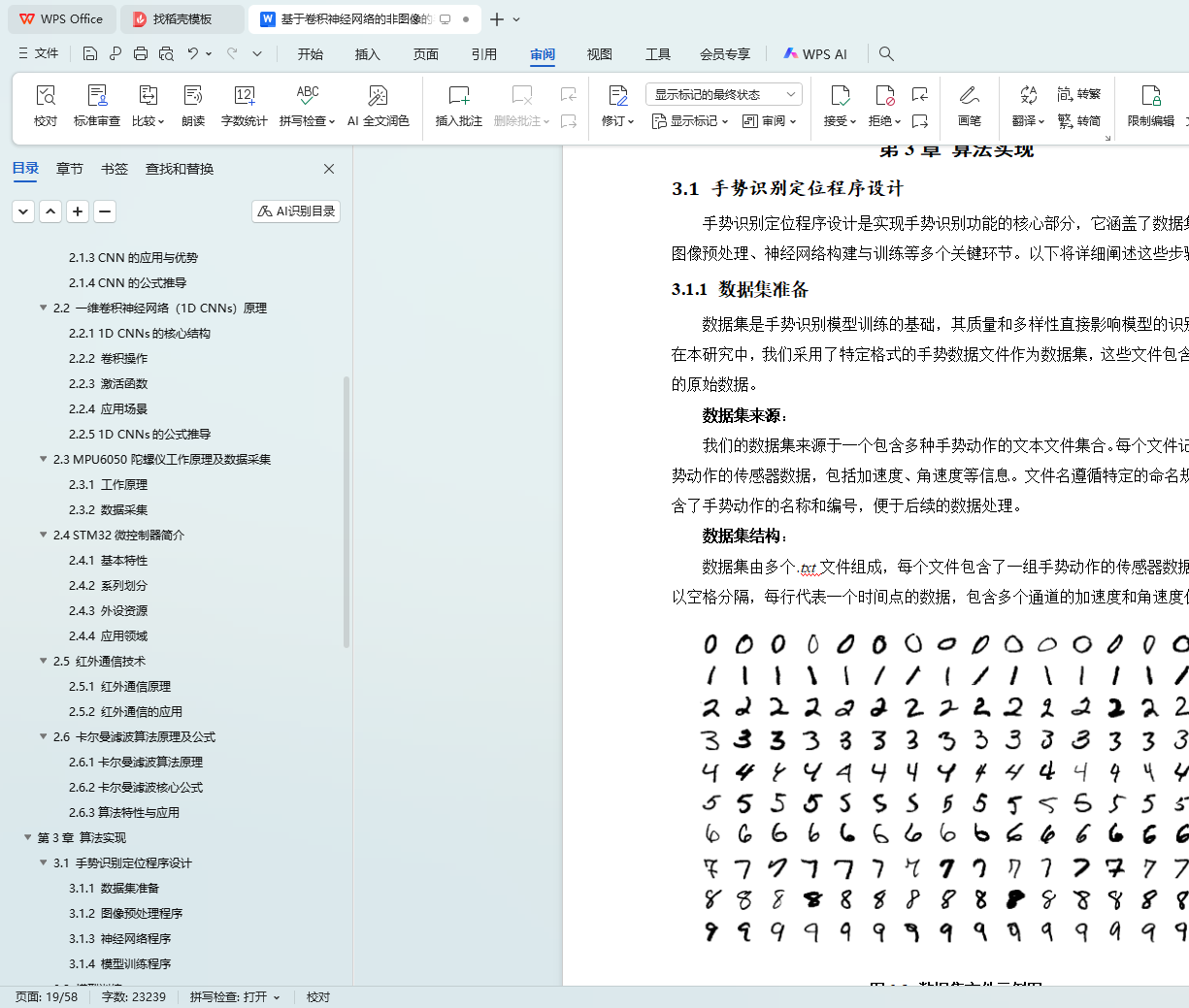
3.1.1 数据集准备
3.1.2 图像预处理程序
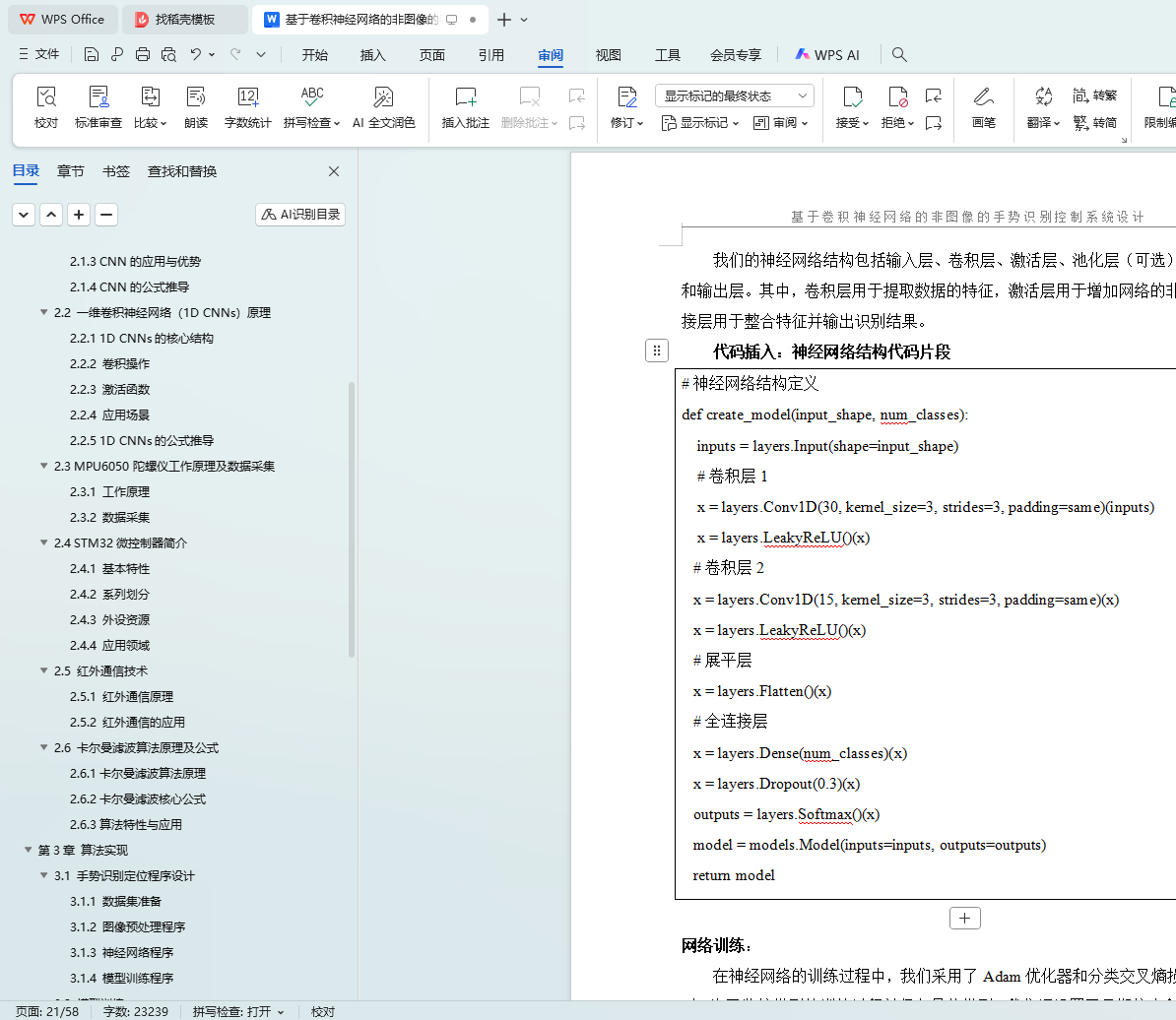
3.1.3 神经网络程序
3.1.4 模型训练程序
3.2 模型训练
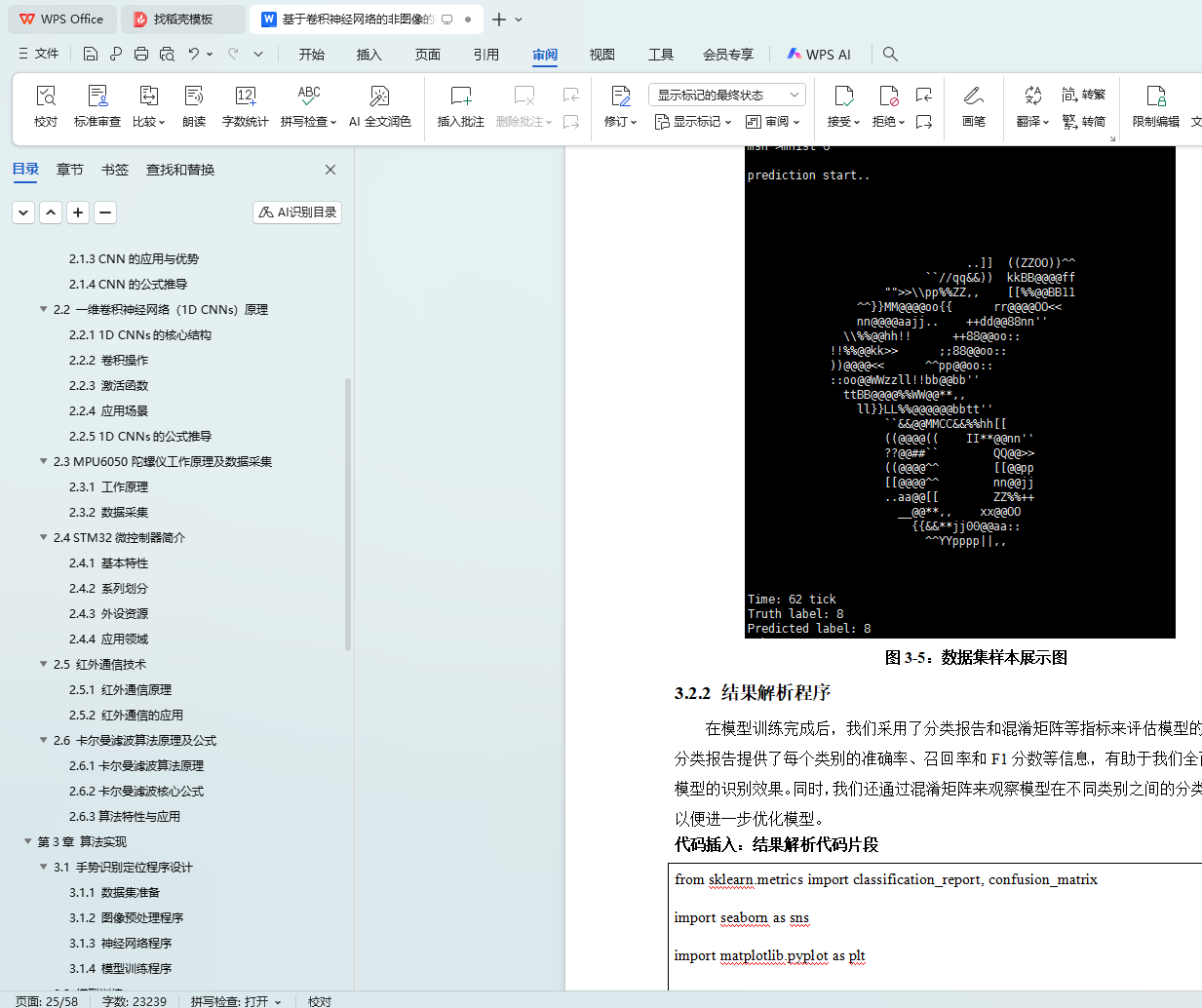
3.2.1 数据集
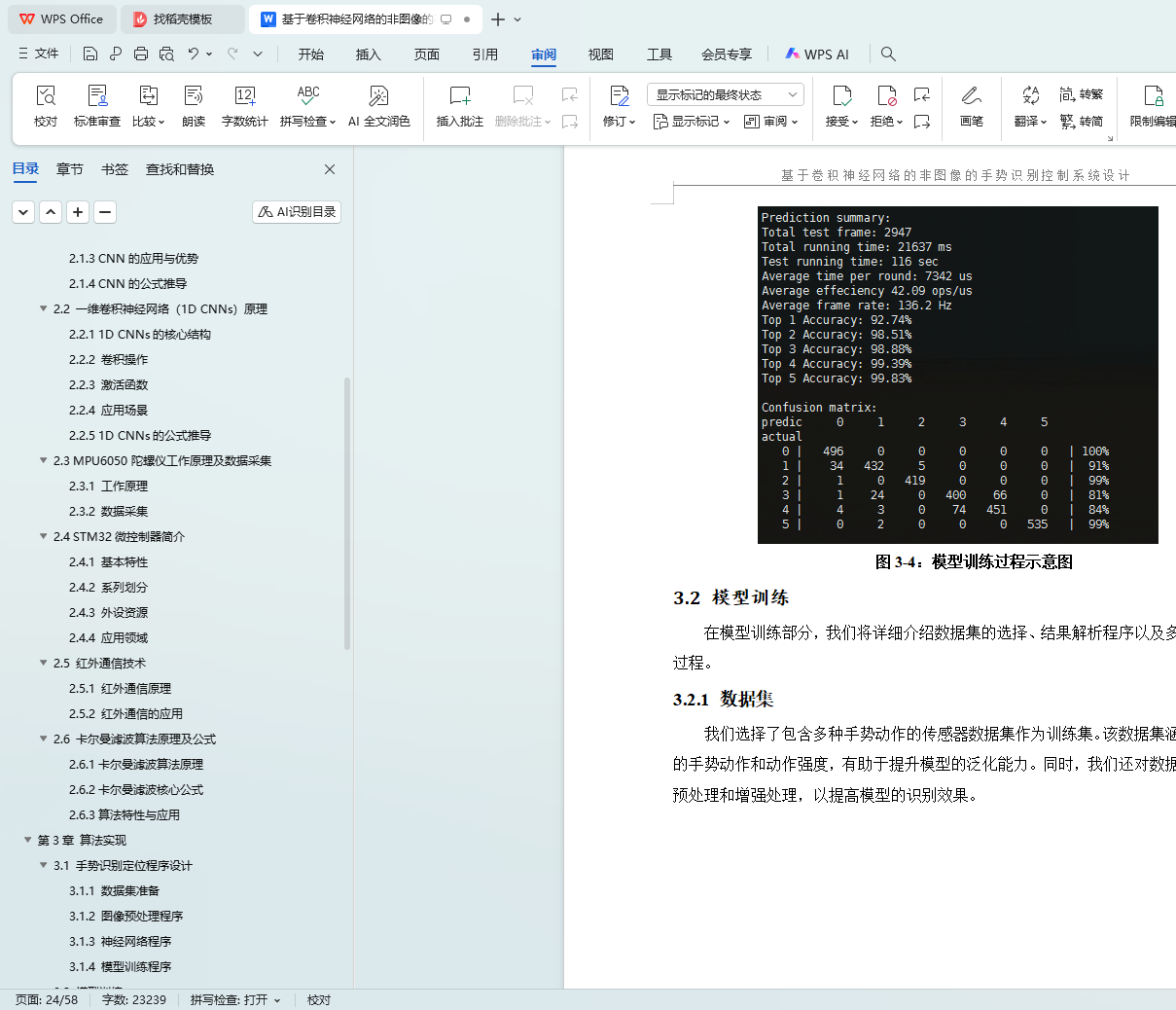
3.2.2 结果解析程序
第4章 系统总体设计
4.1 系统设计思路
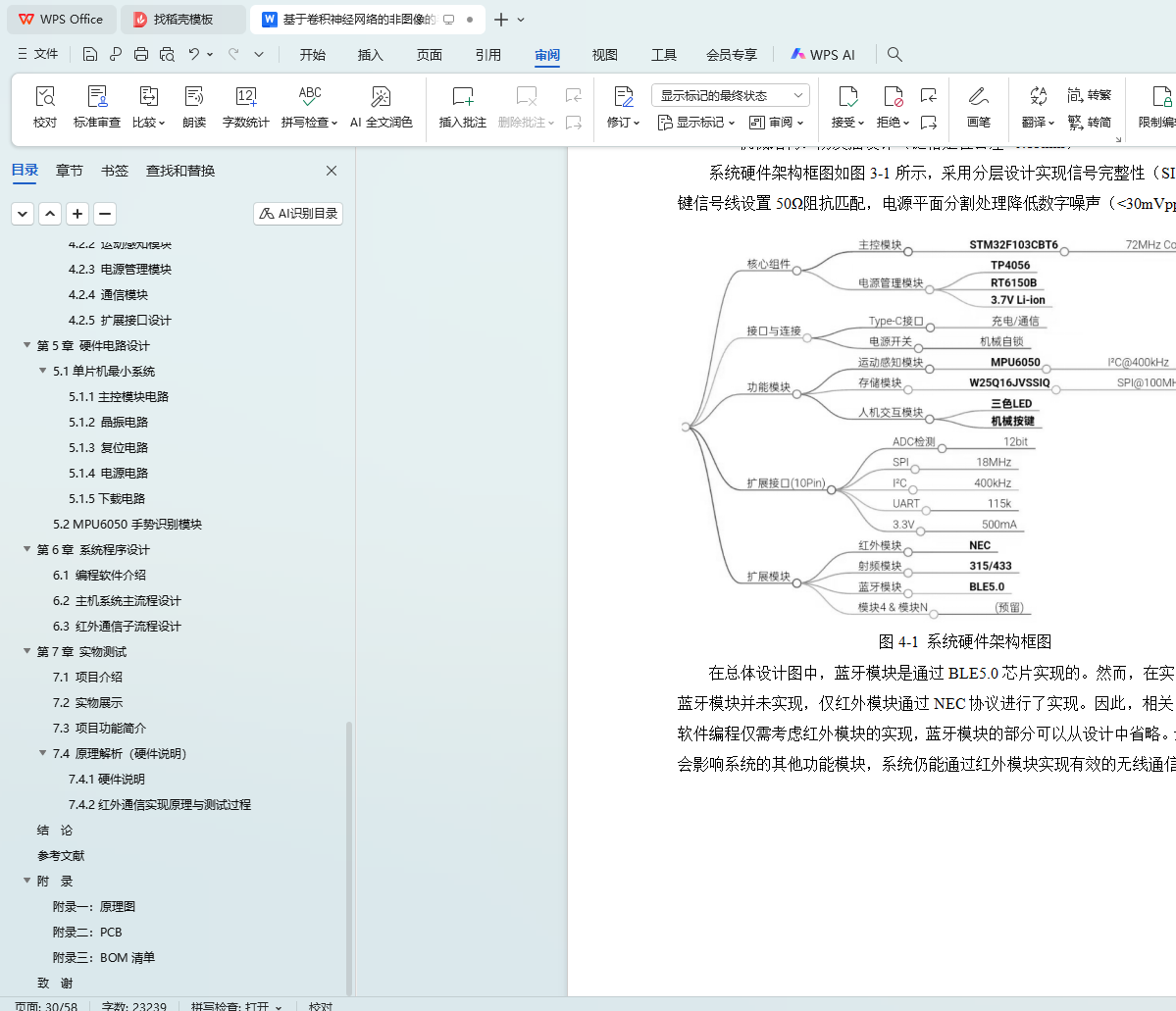
4.2 系统硬件架构设计
4.2.1 主控模块
4.2.2 运动感知模块
4.2.3 电源管理模块
4.2.4 通信模块
4.2.5 扩展接口设计
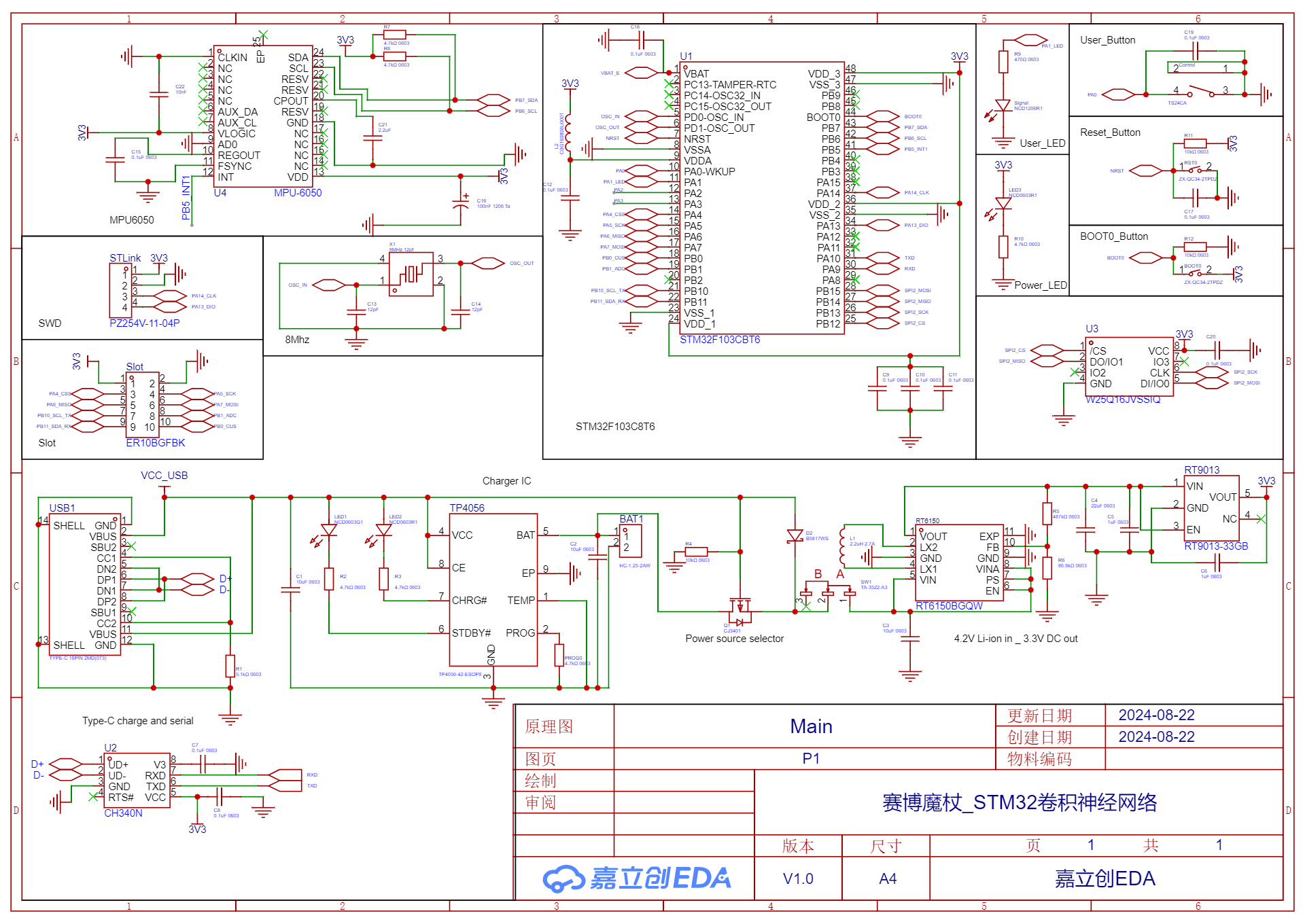
第5章 硬件电路设计
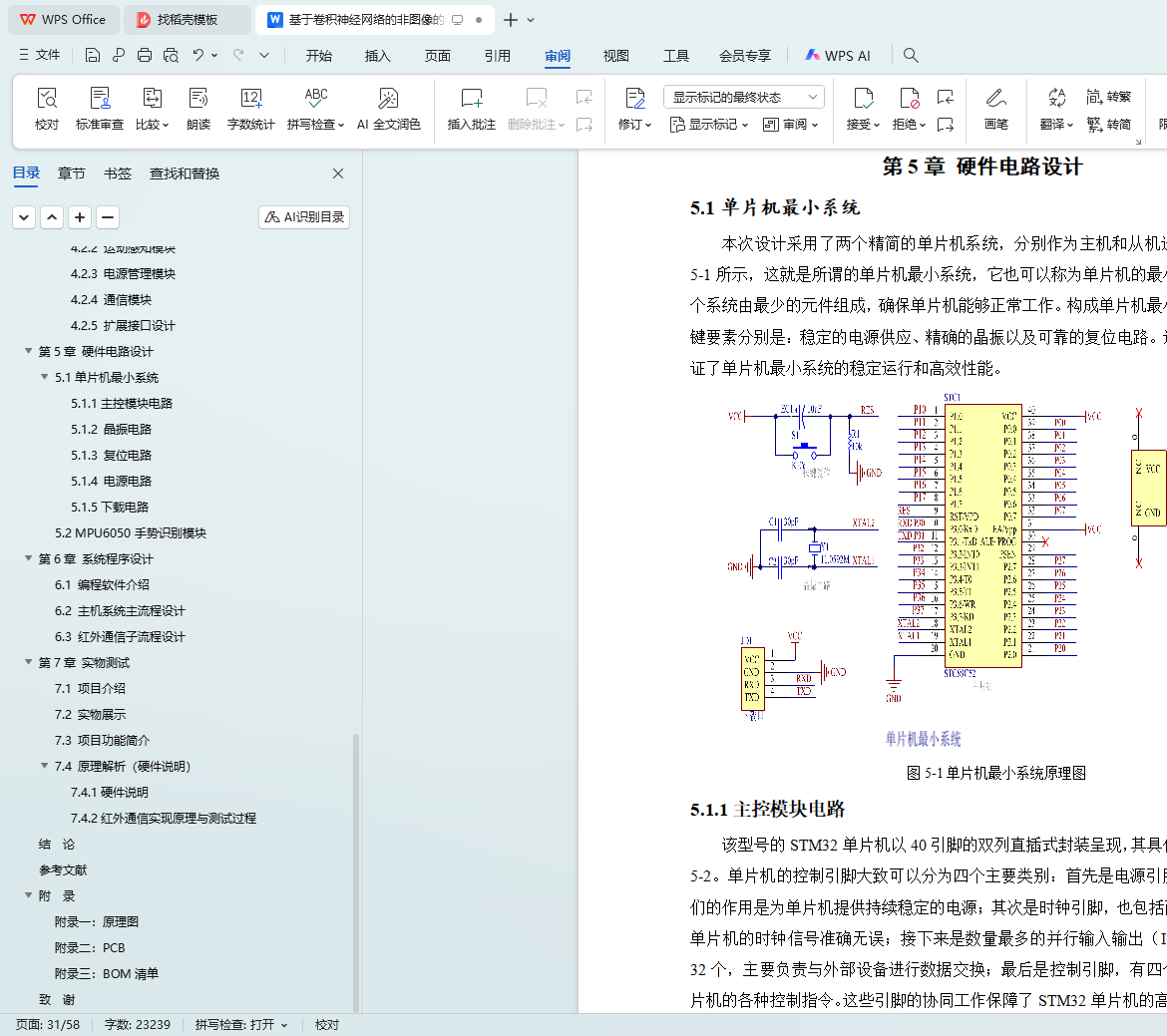
5.1单片机最小系统
5.1.1主控模块电路
5.1.2 晶振电路
5.1.3 复位电路
5.1.4 电源电路
5.1.5下载电路
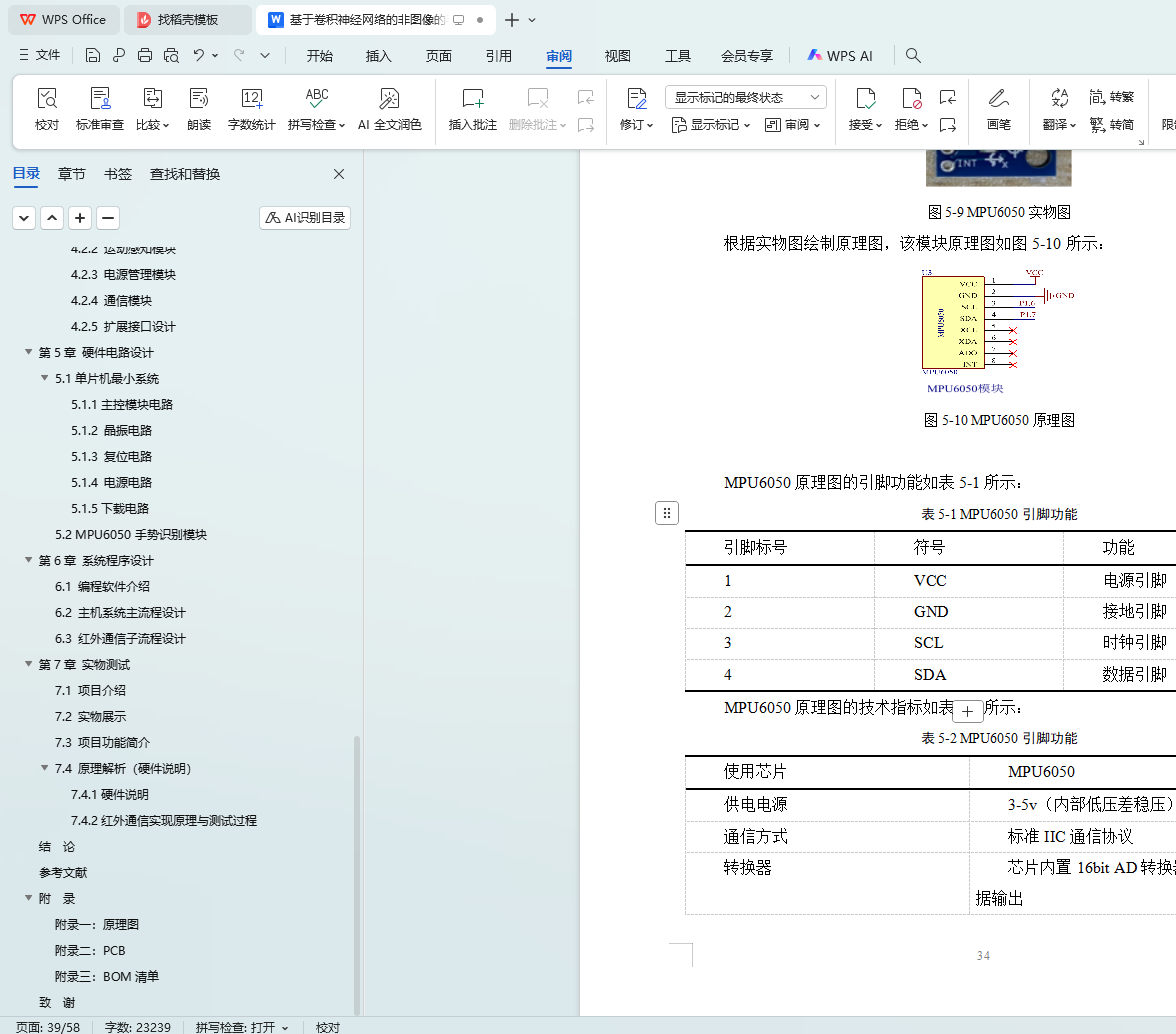
5.2 MPU6050手势识别模块
第6章 系统程序设计
6.1 编程软件介绍
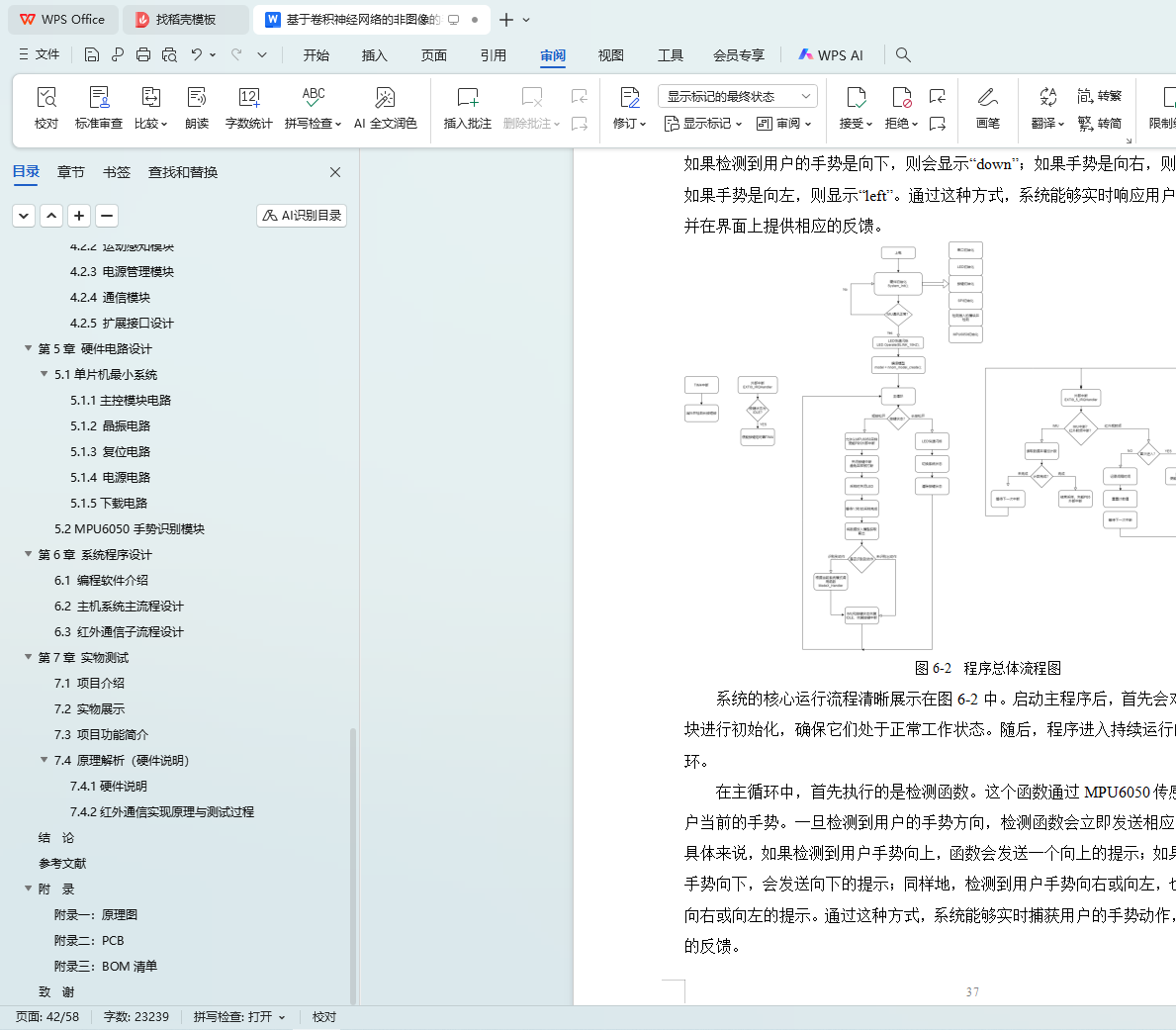
6.2 主机系统主流程设计
6.3 红外通信子流程设计
第7章 实物测试
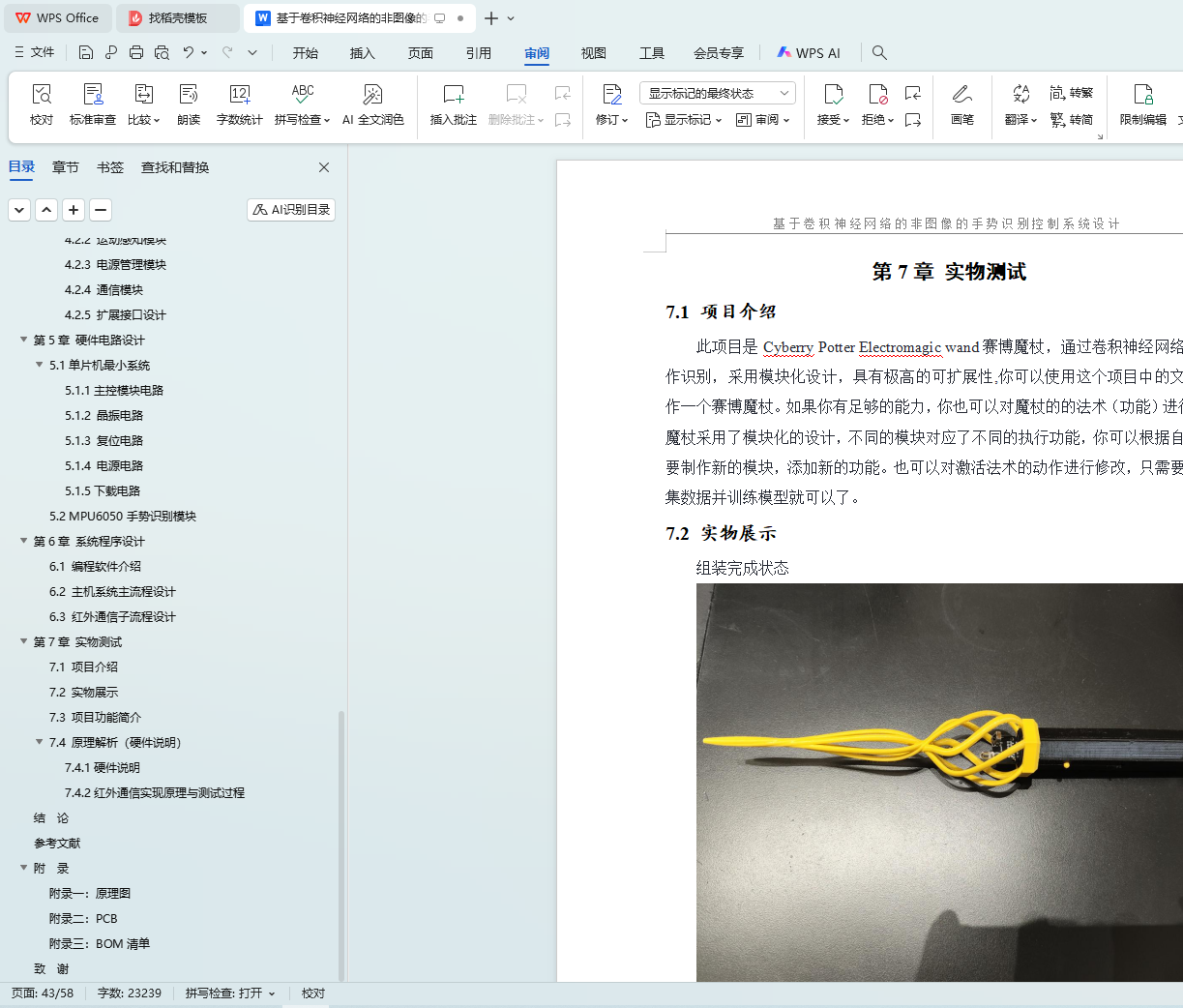
7.1 项目介绍
7.2 实物展示
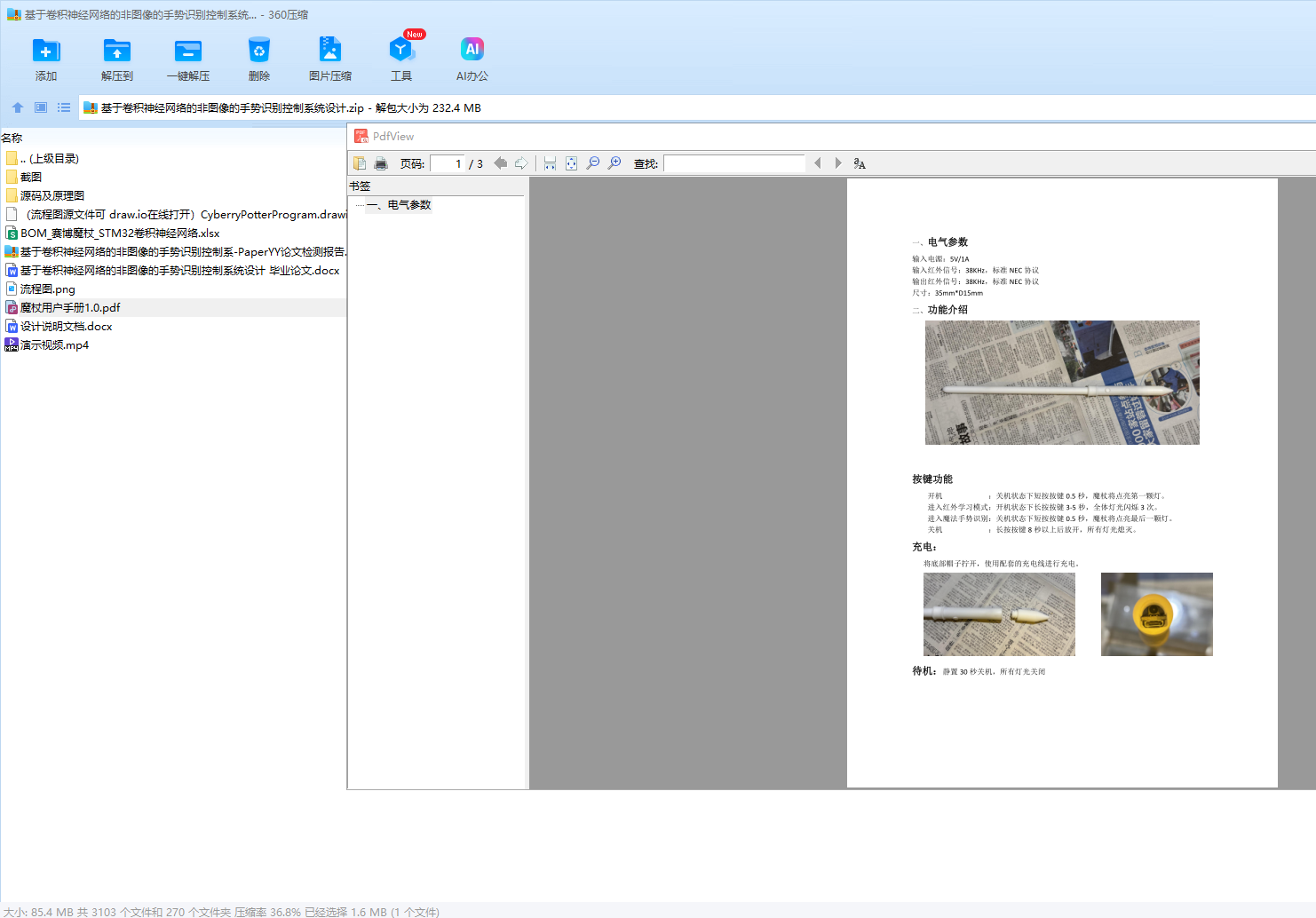
7.3 项目功能简介
7.4 原理解析(硬件说明)
7.4.1硬件说明
7.4.2红外通信实现原理与测试过程
结 论
参考文献
附 录
附录一:原理图
附录二:PCB
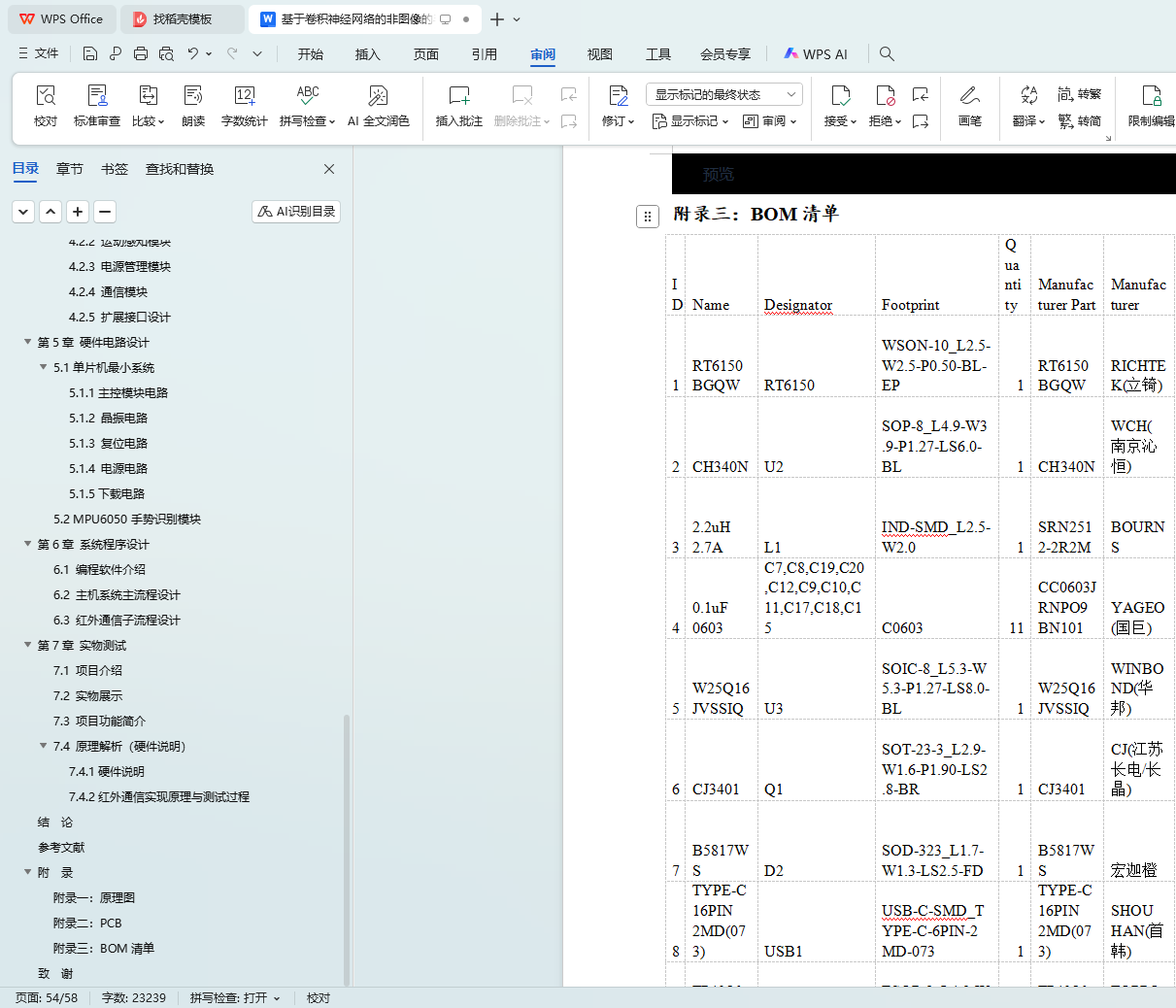
附录三:BOM清单
致 谢