|
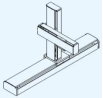
����ṹ���βο�������ͼ��ʾ��
һ����������Ҫ��
1. ʰȡ����ͷ���������2�K
2. �������Χ��X����Ϊ800mm��Y����Ϊ100mm��Z����Ϊ300mm��
3. ����ƶ��ٶȣ�150mm/s
4. �˶�������������10000h
5. ������ʽ������˿�ܻ�ͬ����
6. ֧�ŷ�ʽ��ֱ�ߵ���
7. ������ʽ���������
�����������
1. ��������
2. ������ϸ��е�ṹ����X��Y��Z�������Ļ�е�ṹ�����������ṹ��֧�Žṹ�������ṹ����ر�Ҫ�����Ƚṹ��
�����ɹ�Ҫ��
1. ����1�ݣ�15000�����ϣ����ݸ�ʽ���밴�ա���������ѧԺ���Ʊ�ҵ���(����)д�淶��ִ�С�
2. ������άװ��ͼ1�ݣ�A3ֽ��ɫ��ӡ��
3. ����װ��ͼ1�ݣ����ա���е��ͼ���淶ִ�У�A2��A0ͼ����ӡ��
4. ���ͼ1�ף����ա���е��ͼ���淶ִ�У�A4��ӡ��
5. ���ϳɹ���ͬʱ�ύ��Ӧ�ĵ��Ӱ档
|
