摘要
本文旨在设计一种双轴并联机械手分拣机构,以提升自动化分拣系统的效率和准确性。随着现代制造业的快速发展,自动化生产技术在各行业的应用日益广泛,特别是在电子、食品、医药和物流等领域,物料分拣、搬运和装配的需求急剧增加。传统的人工操作和单轴机械手在速度、精度和稳定性方面已无法满足大规模生产和复杂操作环境的需求。因此,本文提出了一种新型的双轴并联机械手分拣机构设计,旨在克服传统分拣系统的局限性,提高生产效率,降低人工成本,并减少出错率。
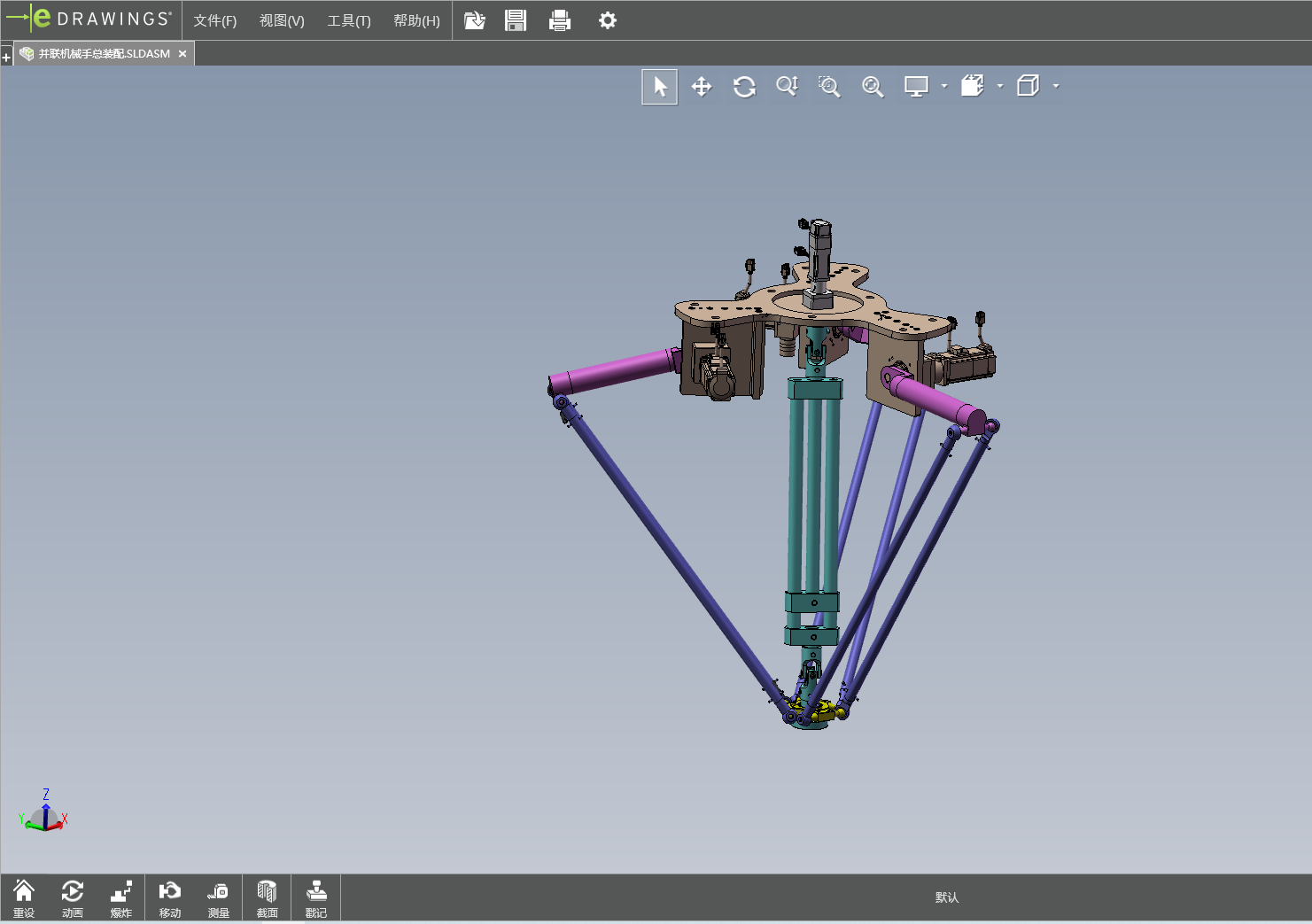
本设计通过合理的双轴并联结构,优化了机械手的运动范围和负载能力,同时确保了结构的简单性和运动的灵活性。通过选择适当的伺服电机和传动系统,实现了机械手的高效运动控制。此外,本设计还考虑了机械手的灵活性,使其能够适应多种产品的分拣需求,并具有较高的可靠性和可维护性。通过计算分析、仿真模拟等手段,验证了设计的性能,确保了机械手在不同工作条件下能够稳定、可靠地完成分拣任务。
本文的研究成果将为制造业的自动化和智能化生产提供一种新的解决方案,有助于推动制造业的高效、高质发展。
关键词:双轴并联机械手;分拣机构;自动化生产;伺服电机;运动控制
Abstract
This paper aims to design a biaxial parallel manipulator sorting mechanism to improve the efficiency and accuracy of the automated sorting system. With the rapid development of modern manufacturing industry, automated production technology is increasingly widely used in various industries, especially in the fields of electronics, food, medicine and logistics, and the demand for material sorting, handling and assembly has increased sharply. Traditional manual operation and single-axis manipulator can no longer meet the needs of mass production and complex operating environment in terms of speed, accuracy and stability. Therefore, this paper proposes a new design of biaxial parallel manipulator sorting mechanism, aiming to overcome the limitations of traditional sorting system, improve production efficiency, reduce labor costs, and reduce error rate.
This design optimizes the range of motion and load capacity of the manipulator through a reasonable biaxial parallel structure, while ensuring the simplicity of the structure and the flexibility of the movement. By selecting the appropriate servo motor and transmission system, the efficient motion control of the manipulator is achieved. In addition, the design also considers the flexibility of the manipulator to meet the sorting needs of multiple products, and has high reliability and maintainability. Through computational analysis, simulation and other means, the design performance is verified to ensure that the manipulator can complete the sorting task stably and reliably under different working conditions.
The research results of this paper will provide a new solution for the automation and intelligent production of manufacturing industry, and help to promote the efficient and high-quality development of manufacturing industry.
Key words: biaxial parallel manipulator; sorting mechanism; automatic production; servo motor; motion control
目录
摘要
Abstract
目录
第一章 绪论
1.1选题的依据、意义
1.2 个人看法
1.3 国内外基本研究情况
1.4 主要研究内容及基本要求
1.4.1 研究内容:
1.4.2 基本要求:
第二章 方案选择
2.1 方案的选择
方案一:双轴并联机械手分拣机构
方案二:凸轮式旋转机械手分拣机构
方案三:双滑块式机械手分拣机构
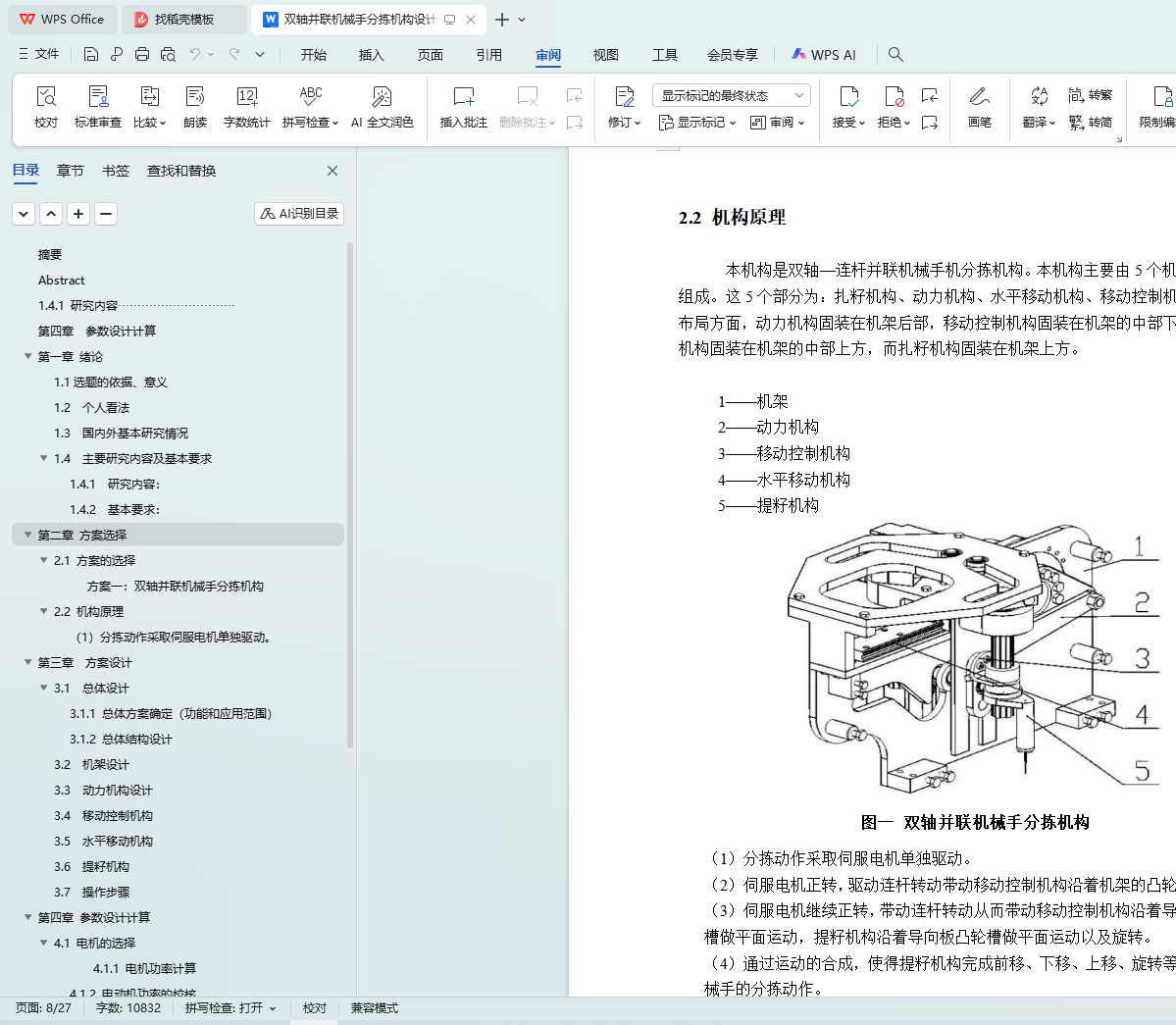
2.2 机构原理
第三章 方案设计
3.1 总体设计
3.1.1 总体方案确定(功能和应用范围)
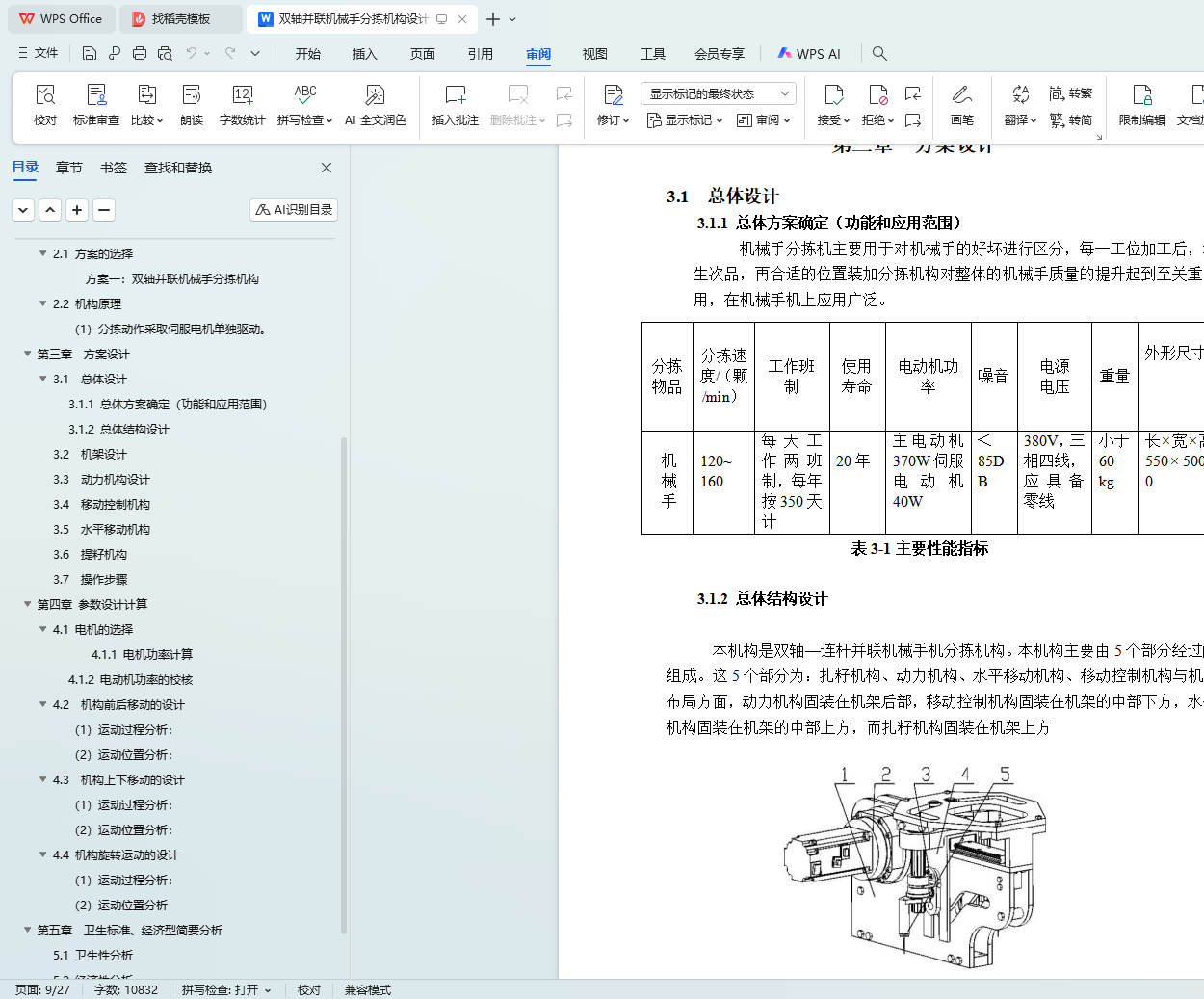
3.1.2 总体结构设计
3.2 机架设计
3.3 动力机构设计
3.4 移动控制机构
3.5 水平移动机构
3.6 提籽机构
3.7 操作步骤
第四章 参数设计计算
4.1 电机的选择
4.1.1 电机功率计算
4.1.2 电动机功率的校核
4.2 机构前后移动的设计
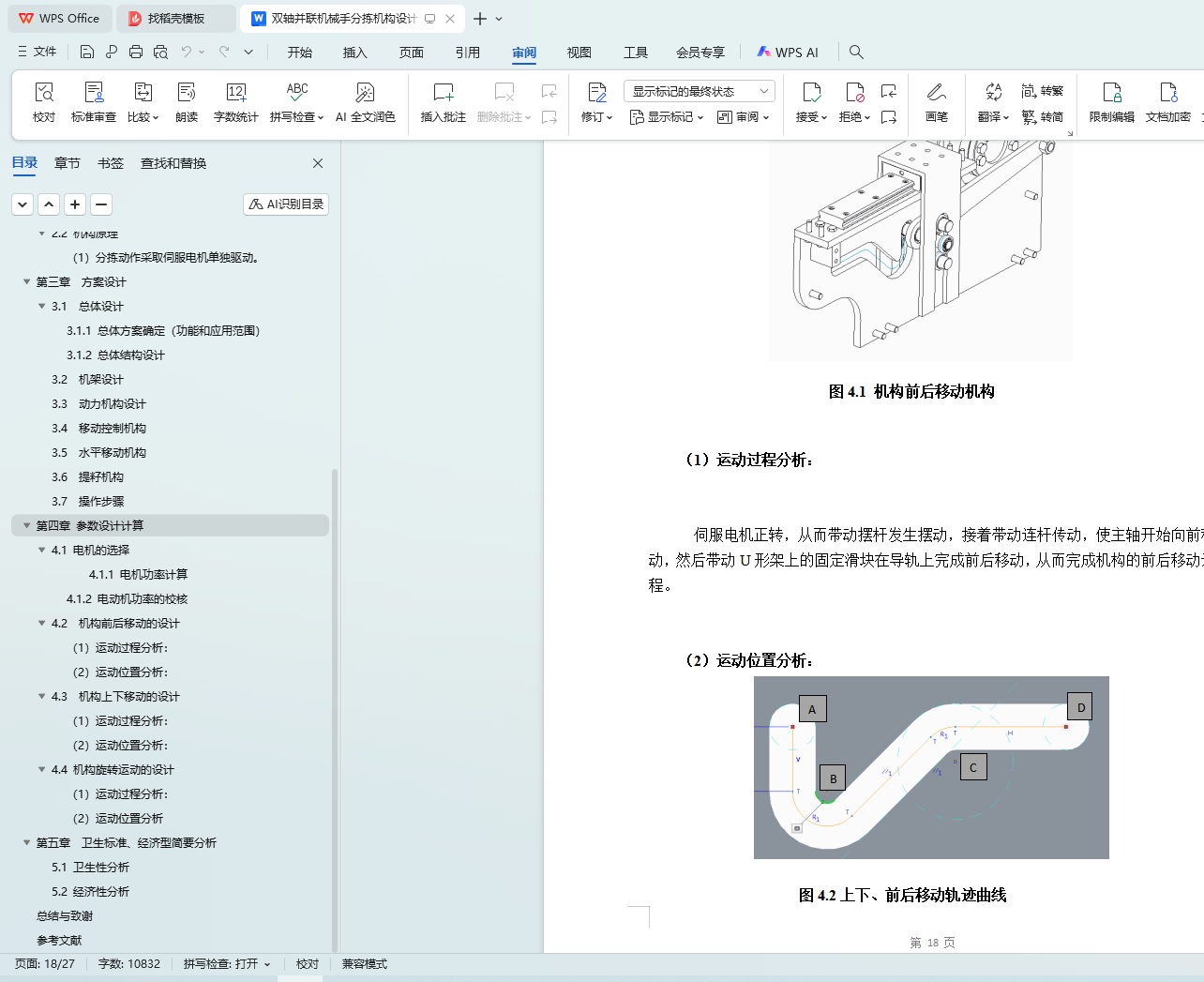
(1)运动过程分析:
(2)运动位置分析:
4.3 机构上下移动的设计
(1)运动过程分析:
(2)运动位置分析:
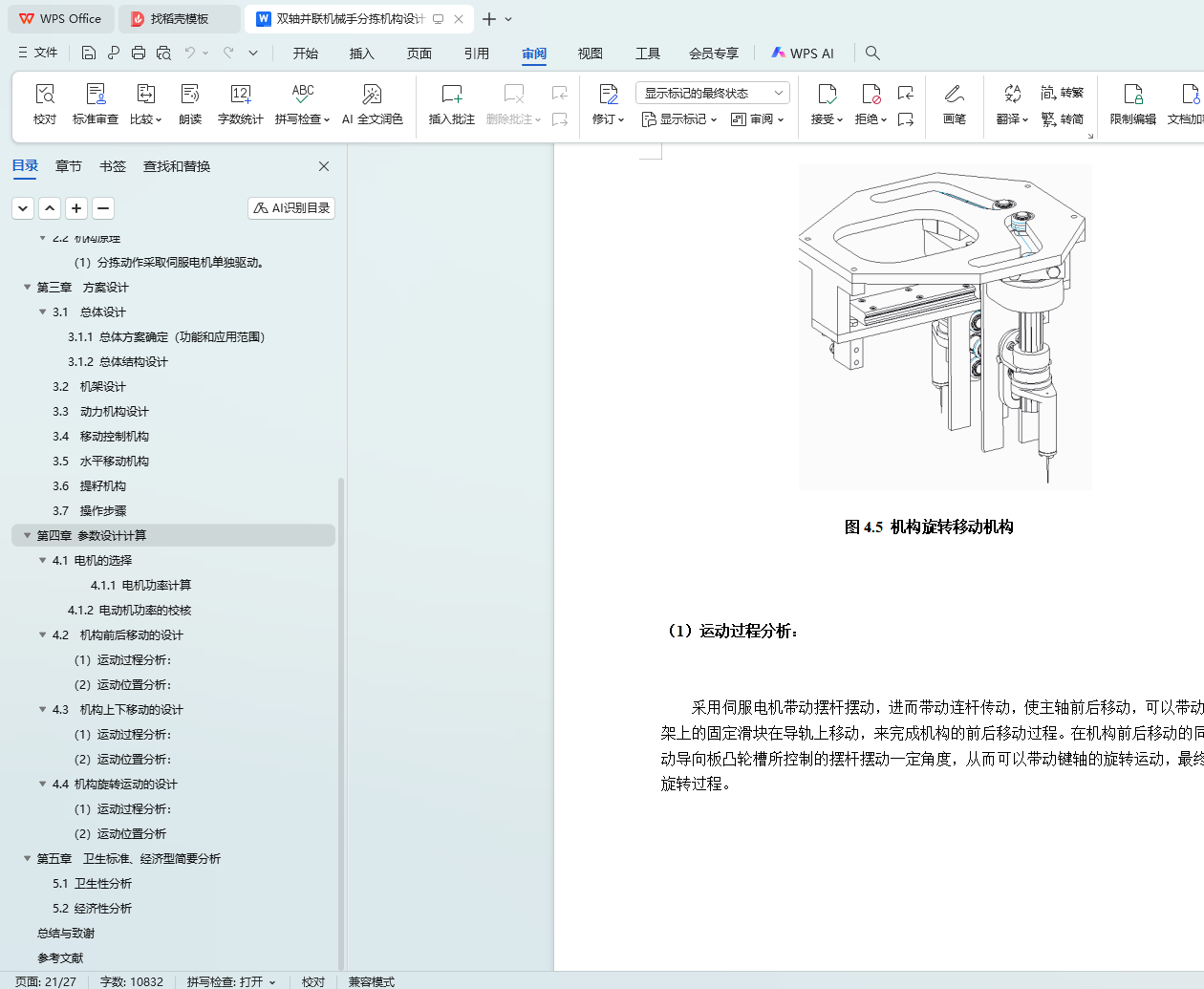
4.4 机构旋转运动的设计
(1)运动过程分析:
(2)运动位置分析
第五章 卫生标准、经济型简要分析
5.1 卫生性分析
5.2 经济性分析
总结与致谢
参考文献