���ڶ�Ŀ��ʶ��Ķ�·�ں��̵�Эͬ���������ʵ��
һ����Ŀ��Դ
����/���ʵ��
�����о�Ŀ�ļ�����
����ȫ���緶Χ�ھ��õķ�չ���˿ڵ�����������ϵͳ������������������������ͳ�ƣ�����������������������������2020���ҹ����������������Ѿ��ﵽ2.7����[1]��������������������˼����ͨ�и��������е�·ϵͳ�ķ�չ����������������������ƥ�䡣�ڳ����ó��߷�ʱ��Σ�ͨ��������´�������ʻ�ϵ�·�����ĵ�·ͨ����������������������ɽ�ͨӵ��[2]����ͨӵ�����ҹ����е�·��ͨϵͳ�зdz��ձ飬������������⣬������ʯ��Դ�����ģ�����Ч�����ʧ�ͽ�ͨ�¹ʵ������[3]������·ӵ�³̶Ⱥܴ�̶����ܽ�ͨϵͳ��·��ͨ��Ч�ʵ�Ӱ�졣��ͳ�ƣ���ͨ�¹��г��� 40%������·�ڣ�����·�ڵ��¹����뽻ͨӵ�³̶������[4]��·�ڵij���ͨ����Ҫ�ɽ�ͨ�źŵƽ��п��ƣ����е��źŵƿ���ϵͳ�����������ͣ���ҪΪӢ����SCOOTϵͳ���Ĵ����ǵ�SCATSϵͳ�Լ��ձ��� KATNETϵͳ�����ǶԵ�·������ȡ�ֲ�ʽ������Ӧ���ƺͼ���ʽ�ĵ�·��������Эͬ���ƣ�ϵͳ�����ԽϲЭͬ�������㣬���ƹ��ɽ�Ϊ����ˣ�·��ͨ��Ч�����нϴ�������ռ�[5,6,7]��ͬʱ���ֽ���е�·��ƹ̶��������ģ�ع���ͨ���ӳ���·���Ȼ��·�������ֶβ������ã��Ż�·��ͨ��Ч����Ϊ�������ܹ��ӽ�ͨϵͳ������иĽ����ֶΡ�·���źŵƿ����ʵ��Ż����ܹ����·��ͨ��Ч�ʣ�����ӵ�³̶ȣ���������Ч�档��ˣ���Գ��е�·��ͨϵͳ�еĴ��ģ·�ڽ��й���Эͬ�Ż����о�����Ҫ��ʵ������߶ȵ��о���ֵ��
�����Ķ�����Ҫ�ο�������������
[1] ����, Ԭ�ұ�, ����.���ܽ�ͨϵͳ����[J].�������ѧ,2014,41(11):7-11+45.
[2] NHTSA. Traffic safety facts 2014[J]. 2014. Available: http://www.nhsta.gov/FARS.
[3] Marchesini P, Weijermars W A M. The relationship between road safety and congestion on motorways[M]. Leidschendam: SWOV Institute for Road Safety Research, 2010.
[4] Hunt P B, Robertson D I, Bretherton R D, et al. The SCOOT on-line traffic signal optimisation technique[J]. Traffic Engineering & Control, 1982, 23(4).
[5] Lowrie P R. Scats, sydney co-ordinated adaptive traffic system: A traffic responsive method of controlling urban traffic[J]. 1990.
[6] Abbas A, Schrauf G, Valero E. Aerodynamic Technologies for More Effective, Environmentally Friendly Air Transport System: The KATnet Strategy[C]. Innovation for Sustainable Aviation in a Global Environment: Proceedings of the Sixth European Aeronautics Days, Madrid, 30 March-1 April, 2011, 2012: 82.
[7] DELL P, MIRCHANDANI B. REALBAND: An approach for real-time coordination of traffic flows on networks[J]. 1995.
[8] S. Darmoul, S. Elkosantini, A. Louati, and L. B. Said, ��Multi-agent immune networks to control interrupted flow at signalized intersections,�� Transportation Research Part C: Emerging Technologies, vol. 82, pp. 290�C313, 2017.
[9] B. P. Gokulan and D. Srinivasan, ��Distributed geometric fuzzy multiagent urban traffic signal control,�� Intelligent Transportation Systems, IEEE Transactions on, vol. 11, no. 3, pp. 714�C727, 2010.
[10] Vanhoucke V, Senior A, Mao M Z. Improving the speed of neural networks on CPUs[J]. 2011.
[11] Silver D, Huang A, Maddison C J, et al. Mastering the game of Go with deep neural networks and tree search[J]. nature, 2016, 529(7587): 484-489.
[12] ����÷, ����, ������, ��. ��, ŷ, �����ܽ�ͨϵͳ (ITS) ��չ��������ʾ[D]. 2004.
[13] ������. �����ڻ����ƽ���������+���ж���ָ����������[J]. ������ҵ�빤��, 2015(5): 7-10.
[14] �³�, ��ֲ��, ����, ��. �����·Эͬϵͳ��չ��״����[J]. ��ͨ��Ϣ�c��ȫ, 2011, 29(1): 102-105+ 109.
[15] Mirchandani P, Wang F Y. RHODES to intelligent transportation systems[J]. IEEE Intelligent Systems, 2005, 20(1): 10-15.
[16] DELL P, MIRCHANDANI B. REALBAND: An approach for real-time coordination of traffic flows on networks[J]. 1995.
[17] Mauro V, Di Taranto C. Utopia[J]. IFAC Proceedings Volumes, 1990, 23(2): 245-252.
[18] Qun-zu L, Qing-guo X, Ming-chun B A, et al. Status and development of the urban traffic signal control system[J]. Science Technology and Engineering, 2009, 2009: 24.
[19] ����, �ܵ���. ����HiCon��ͨ�źſ���ϵͳ[J]. �й���ͨ��Ϣ��ҵ, 2004, 10: 52-55.
[20] �λ�, ֣����, ��Ƽ.���������ܽ�ͨ�źſ���ϵͳ.�й�������ȫ:���ܽ�ͨ, 2007; (8): 45-49.
[21] ţ��, ���Ƽ, �� ��. ���е��㽻����źŵ�ģ�����ƽ�ģ�����[J]. ��ͨ����, 2009(17): 32-36.
[22] ������, ������. �źŵƽ���ڳ���ɢ��ģ�����źŵ�Э������[D]. 1996.
�ġ���������״�ͷ�չ�������о�����������
��һ�������о���״
��ͨ�źſ������ڲ�ȡ�˹����ƣ�����������ӻ���չ��ֱ������ļ�������ơ����ƵĶ�������ֻ�ǵ���·�ڵ��źſ��ƣ�������չ��Э������ϵͳ������ϵͳ���Ի��������߽����źŵ�Э�����������Ѿ�����ʵ�ִ�Χ��ͨ�����ڵ�����Э�������ڵĿ��������ߵģ�Ҳ�����������һ���̶����źŵ����ڣ�Ȼ�����źŵ���ִ�У������ڵĿ��Ʋ���ʵʱ�ظ��ݽ�ͨ��״̬���о��ߣ����ߵؽ��п��ơ�
20����70�����ʼ���Ĵ����ǿ�ʼ�о�SCATS��ͨ�źſ���ϵͳ��1980�꿪ʼ����Ӧ���ڳ��н�ͨϵͳ�С�SCATS��һ�ַ���ѡ��ʽ������Ӧ����ϵͳ�����·�����һ����ϵͳ���ϲ�����ϵͳ֮�����Э������ϵͳ֮����Էֽ����飬�²�����ϵͳ�ڽ��п��Ʋ�����ѡȡ�����Ʋ��������ź����ڡ����ű��Լ���λ���ϵͳ�����ϲ���Ƶ�����λ���ϵͳ�ڲ�����ϵͳ�Ƕ�ͳһ��ѡȡ�ź����ں����űȣ�������ʵʱ�Ľ�ͨ�����ݽ�����������ϵͳʵ���ϲ�δʹ�ý�ͨģ�ͣ���Ҫ��һ�ַ�����ѡ���Ż��̶Ȳ��ߣ�����Խϲ
��һ�ֽ�Ϊ�������źŵƿ���ϵͳ����Ӣ����SCOOTϵͳ������1979����ʽͶ��ʹ�ã�����ȫ��200������еõ���Ӧ�ã�Ҳ�ڼ������������в������ơ�SCOOTͬ���Ƿ�������ʽ������Ӧ����ϵͳ�����ܹ�ʵʱ�ز�����ͨ����Ϣ���ٻ�����Щ��ͨ����Ϣ������ʱ�Ż�����ͬ��SCATS��������ʱ�Ż����ڽ�ͨģ�ͽ��С�ϵͳ���Ȳɼ�ʵʱ�Ľ�ͨ����Ϣ��Ȼ����������Ļ��֣�����ͨ����ͨ��ģ�ͽ��г���Ԥ��ͳ����Ŷӳ���Ԥ�⣬�������Ƶ�ʽϸߡ�������С��ģʽȥ�����źŲ����������Ż���SCOOT������Ϊ��ͨ��ʵʱ��ͨģ����ȷ���ź���ʱ���������ܹ������һ���ڵĽ�ͨ��������Ԥ�⣬ʹ��Ԥ���Ϊȷ�����Ƹ�Ϊ��Ч��ͬʱ��������Ƶ�ʽϸߡ�������С���Ż���������ģʽ���������Ż�������������Ŷ��������SCOOT�����У���ͨģ�͵Ľ�����Ҫ���Ĵ�������Դ���Լ۱Ȳ��ߡ���ͨ�ź���λ�ǹ̶��ģ���λ��˳��Ҳ���Զ��ı䣬����Բ��ѡ����⣬�������������ֵķ�����δ��ȷ��
1996 �꣬��������ɣ�Ǵ�ѧ������RHODES��Real-time Hierarchical Optimized Distributed and Effective System��ϵͳ,���Ա���RHODES�ڰ�ӵ���� ͨϵͳ�µı��ֺܺ�[17]��RHODESͬSCOOTһ�������ý�ͨԤ��ģ����ǰ��ý�ͨ���Ĺؼ���Ϣ����ʹϵͳ�Ŀ�����Ӧ���ͺ��ڽ�ͨ״̬������ҪԤ�ⵥ���� �����˶���Ԥ��������ͨ�����ںͳ����ڵı仯��Ӧ�����Ż�����������Ƶ�����ָ���Ż���������RHODES����ṹ������ݽ����д�Χ�Ľ�ͨ���絽����·�ڵľ��ߣ���һ���SCOOT�������ϲ�����縺�ɷ����Գ�ʱ��Ľ�ͨ����Ԥ�⣬�Ӷ�ȷ���Ŷӳ��ȵ��Ͻ硣�м��������Ʋ�Ԥ�����δ��״̬���ڸ���·��֮������Լ�����Ӷ�ʵ��Э�����ơ����õ���һ�ֽ���ʵʱ�̲�����Realband�����㷨�����dz����������ڵĿ��ܳ�ͻ��ʹ�þ������Խ���Э�����ƣ�������ѡȡ���Ų�����Ϊ·�ڼ佨��Э��Լ������ײ��·�ڿ��Ʋ�����ϲ�ľ��ߺ͵�ǰ·�ڵĽ�ͨ״̬���о��ߣ����Ƶ�ǰ·�ڵ���λ˳�ʺ��̵�ʱ����ֵ��ע����ǣ�����RHODES���÷Dz��������ƣ����������ź����ڡ��ź���λ������űȣ����ǿ�����λ˳�����λ���ȡ������߷�������COP����˼����ǹ������Ż����⣬���ö�̬�滮ȥ���������ķ�����RHODESϵͳ�����һ���µ�ʵʱ�̲�����Realband�������þ��������������ϲ�Э�����ƣ������Ż�����ʵ�ֵײ���ƣ��Ż�Ŀ���������ѡȡ����Ϊ���[18]��
1985�꣬�����Mizar Automazione��Ƶķֲ�ʽʵʱ��ͨ����ϵͳ SPOT/UTOPIA��ʼ�ڳ��е�·ϵͳ������[19]����ͬ����ȡ�ֲ���ԣ��ϲ��ڴ�Χ������Э�����ƣ����Ʒ���ͬ���������ſ��Ʒ��������������������Ļ��֣����������ں�Ȩ�ء��²�ĸ�������������ͬ�����ڣ�ͨ�����ϵ������������Ż����ܺ�����
�����������о���״
�ҹ���ͨ�źŵƿ���ϵͳ��չ������20����80������������������㽻ͨ����ϵͳ��ͬʱ���������������ҹ������з������ܳ��н�ͨϵͳ��Ϲ�����콻ͨ����ϵͳ���ŵ㣬����ҹ����е�·�Լ����ص㣬ȡ����һ���ɾͣ���Ҫ���Ͼ���˹���н�ͨ����ϵͳ��NUTCS�����ൺ����HiCon��ͨ�źſ���ϵͳ������SMOOTH��ͨ�źſ���ϵͳ[20, 21, 22]����Щ����������Ʒ��Ե��ص�·���ص�ͽ�ͨ����������ƿ���������SMOOTH��ȡ��SCATSϵͳս�����IJ��ԣ���Ը߱��Ͷȡ�������ֵ�߸��ӶȵĽ�ͨ��������ƽ������ͨ��Ч�����Ϊ����Ŀ�꣬�ڸ߷�����ӵ�³̶���С��Ϊ����Ŀ�꣬�dz�������Ч��
����Ӧ�ò�Ʒ�������ƵĽṹ����ʹ�÷ֲ�ķ������ϲ�����ʵ��Э���Ż��������ӻ��ڹ���ķ��������ſ��Ʒ��������ݸ��²�����ݸ�����ͬ����Э��Լ������ϵͳ�Ļ��ֺͲ�������ɢ���Ŀ��Ʋ��Եȡ��²�Ը���·��ʵʩ�ֲ�ʽ�Ŀ��ƣ�����ͨ�źſ������ľ��ߣ���Ҫ�ۺϵ�ǰ·�ڵĽ�ͨ��״̬���ϲ���߽���������ۺϾ��ߣ��������ľ��߷���������ɢ���Ļ��ڹ���IJ��ԣ�������Dz������ſ��Ƶķ�����ȡ�����������ַ������Ż��̶ȸ��ߡ���ͨ����ʱ����ݻ������Ԥ��ķ������������ڶԽ�ͨ��δ��״̬�Ĺ��ƣ���Ԥ���벻����ͨģ�ͣ�������˵��Ϊ�����͡���Щ�������ǵ�һ���㷨�����Ƕ�����ɢ���IJ��Ժ��Ż������Լ�һЩ����˼�����������ۺϾ��߷�����
�塢��Ҫ�о����ݡ����ص��о��Ĺؼ����⼰���˼·
��һ����Ҫ�о����ݣ�
���̵ƿ���ϵͳ��ƣ��о������������ͷ�ɼ���ͨ��Ƶ���ݣ�����YOLOv8�㷨����Ŀ���⣬ʶ��·�ڵ����ˡ�������Ŀ�꣬�Ӷ�ʵʱ��ȡ��ͨ������Ϣ��
��·��Э�����ƣ��ڶ��·��֮��Э�����̵��źţ��Լ��ٳ����ȴ�ʱ�䣬���ͨ��Ч�ʣ����⽻ͨӵ�¡�
ϵͳӲ��ʵ�֣�ʹ����ݮ����Ϊ���ƺ��ģ��������ͷ�������ܵ����ģ�ʵ�ֺ��̵ƵĿ��ơ���ݮ�ɽ���YOLOv8�㷨����������ݣ������ڽ�ͨ״�����źŵƽ���ʵʱ���ơ�
��ͨ����Ԥ������Ʋ��ԣ�����Ŀ�����ʵʱ���ݣ����ý�ͨ����Ԥ��ģ�ͣ������ʱ�����л����ѧϰ��Ԥ�ⷽ������δ���������������Ԥ�⣬��̬�������̵����ں�·�ڵ����ȼ���
���������ص��о��Ĺؼ�����
��ݮ������YOLOv8�������Ż���YOLOv8�㷨��Ӳ������Ҫ��ϸߣ���Ҫ����ģ�ͼ�֦�������ȼ������ͼ��㸺�أ�������Ӳ�����٣���ʹ��NPU��GPU����ģ�飩��
��·�ڽ�ͨЭ���㷨��ƣ���Ҫ��ƻ���ʵʱ������ݵĺ��̵�Э���㷨��ƽ����·�ڵ����������ⵥ��·�ڵ�ӵ��������·�ڴ�����
����ͷ���ݵ�ʵʱ�����봦������֤����ͷ�ɼ�����Ƶ�ܹ����ӳٴ��䵽��ݮ�ɽ��д�����ͬʱʵʱ������̵ƿ����źš�
Ӳ�������뼯�ɣ�ȷ����ݮ�ɵ�GPIO�ӿ��ܹ��ȶ����ƶ������źŵƣ�ͬʱʵ��ģ�黯��ƣ�������չ�͵��ԡ�
���������˼·
YOLOv8Ŀ�������Ż���ʹ��ģ���������ü��ȼ����Ż�YOLOv8����������ݮ�ɵļ��������������Ҫ���ߵ����ܣ���������Ӳ�������豸����Google Coral��������NVIDIA Jetson Nano������������ٶȡ�
��·��Э���㷨������YOLOv8�����Ŀ���������糵�����������������㽻ͨ���������ڽ�ͨ����Ԥ�����Э�������㷨������ͨ��ǿ��ѧϰ������Ӧ���ƶ�̬�������̵�ʱ��
��ݮ����Ӳ�����ƣ���ݮ��ͨ��GPIO�ӿڿ��ƺ��̵ƵĶ�����ģ�顣ͨ��PWM�źŵ��ڵƹ����ȣ���ǿ�źŵƵ�ģ��Ч�������һ��������ȳ���ʹ��ݮ���ܹ����д���Ŀ������źŵƿ��ơ�
ϵͳ�������Ż����һ��ģ���·�ڵ�ʵ�黷�������ö������ͷ�Ͷ�����ģ����в��ԣ�ͨ��ͨ��Ч�ʡ�ƽ���ȴ�ʱ�䡢ϵͳ��Ӧʱ���ָ����������Ч���������ڽ������������
��������ܹ�ʵ��һ����·�����ܽ�ͨ����ϵͳ�������ڽ����ͨӵ�����⣬��߽�ͨϵͳ��Ч�ʡ�
(�ģ�ϵͳ��˼ͼ
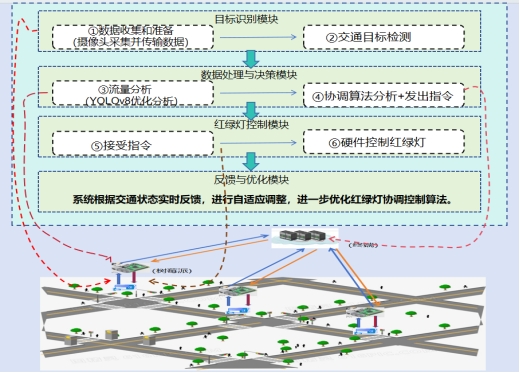
ͼ1 ϵͳ��˼ͼ
������ɱ�ҵ���������߱��Ĺ�������
PC��Ӳ��Ҫ��
��1��CPU���Ƽ�ʹ��Intel I5����
��2���ڴ棺�Ƽ�ʹ��16G����
��3��Ӳ��ʣ��ռ䣺��С��100G
PC������Ҫ��
��1������ϵͳ��Windows/Linux����ϵͳ
��2����װpython
��3��������
�ߡ������Ľ��̺�ʱ�䰲��
2024��10��18����2024��11��7�գ���ϵָ����ʦ��ȷ��������ݣ�����������ϡ�
2024��11��8����2024��12��31�գ���������������ϣ����ж�������Ŀ����ԶԱȣ����п����磬ȷ����Ҫ�����Ĵ��¿�ܡ�
2025��1��1����2025��4��29�գ���һʵ�ָ������ܣ����Ѹ�������ģ��������ϣ�ͬʱ���е��Ժ��ġ�
2025��4��30����2025��5��30�գ���ϵͳ�����ĵ��ԣ�ͬʱд���ģ������������ˡ�
