前 言
随着仿生学与机器人技术的飞速发展,仿生机器人已日益成为机器人领域的研究热点。仿生学将有关生物学原理应用到对工程系统的研究与设计中,尤其对当今日益发展的机器人科学起到了巨大的推动作用[3]。当代机器人研究的领域已经从结构环境下的定点作业中走出来,向航空航天、星际探索、海洋探索、水下洞穴探索、军事侦察、军事攻击、军事防御、水下地下管道探测与维修、疾病检查治疗、抢险救灾等非结构环境下的自主作业方面发展,未来的机器人将在人类不能或难以到达的已知或未知环境里工作。人们要求机器人不仅要适应原来结构化的、己知的环境,更要适应未来发展中的非结构化的、未知的环境。除了传统的设计方法,人们也把目光对准了生物界,力求从丰富多彩的动植物身上获得灵感,将它们的运动机理和行为方式运用到对机器人运动机理和控制的研究中,这就是仿生学在机器人科学中的应用。
本文结合当前仿生机器人的研究现状与未来发展方向,以慧鱼机器人模型为平台制作对机械本体结构、传动系统,控制系统的软件编程进行了系统设计及介绍。现对研究和实验当中取得的主要成果总结如下:
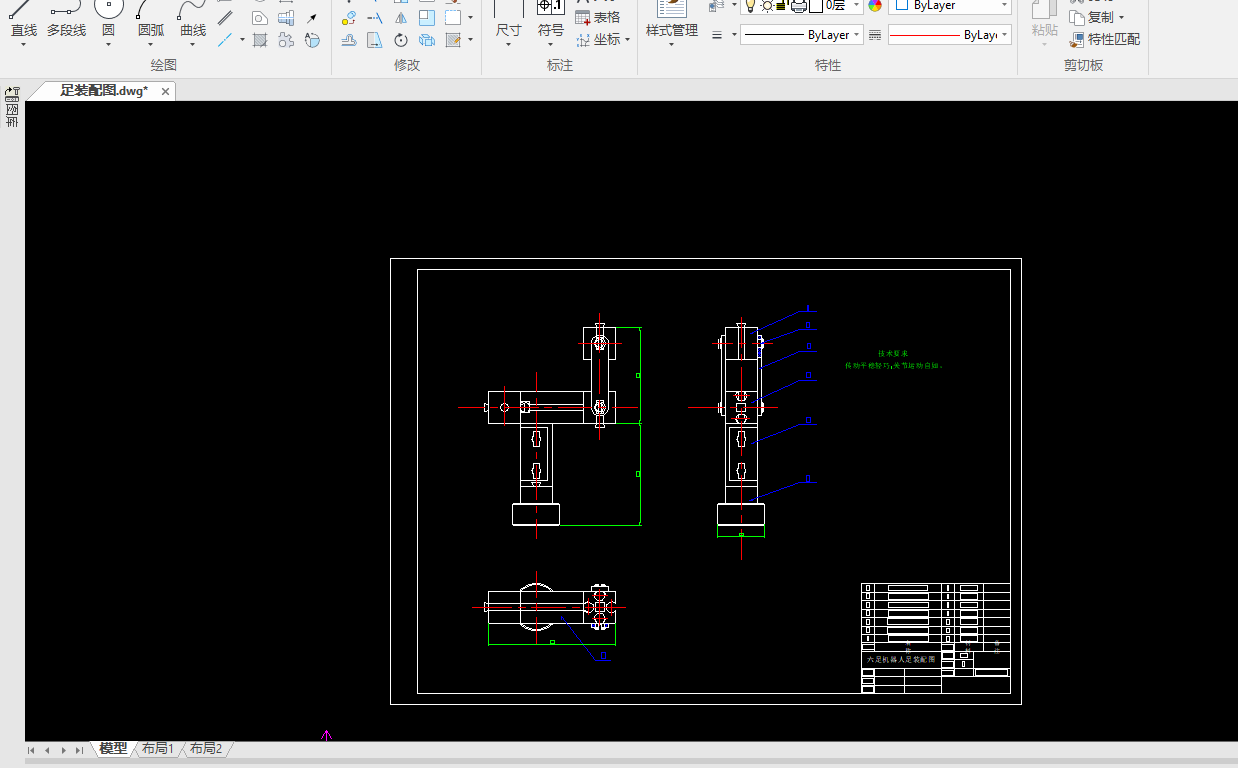
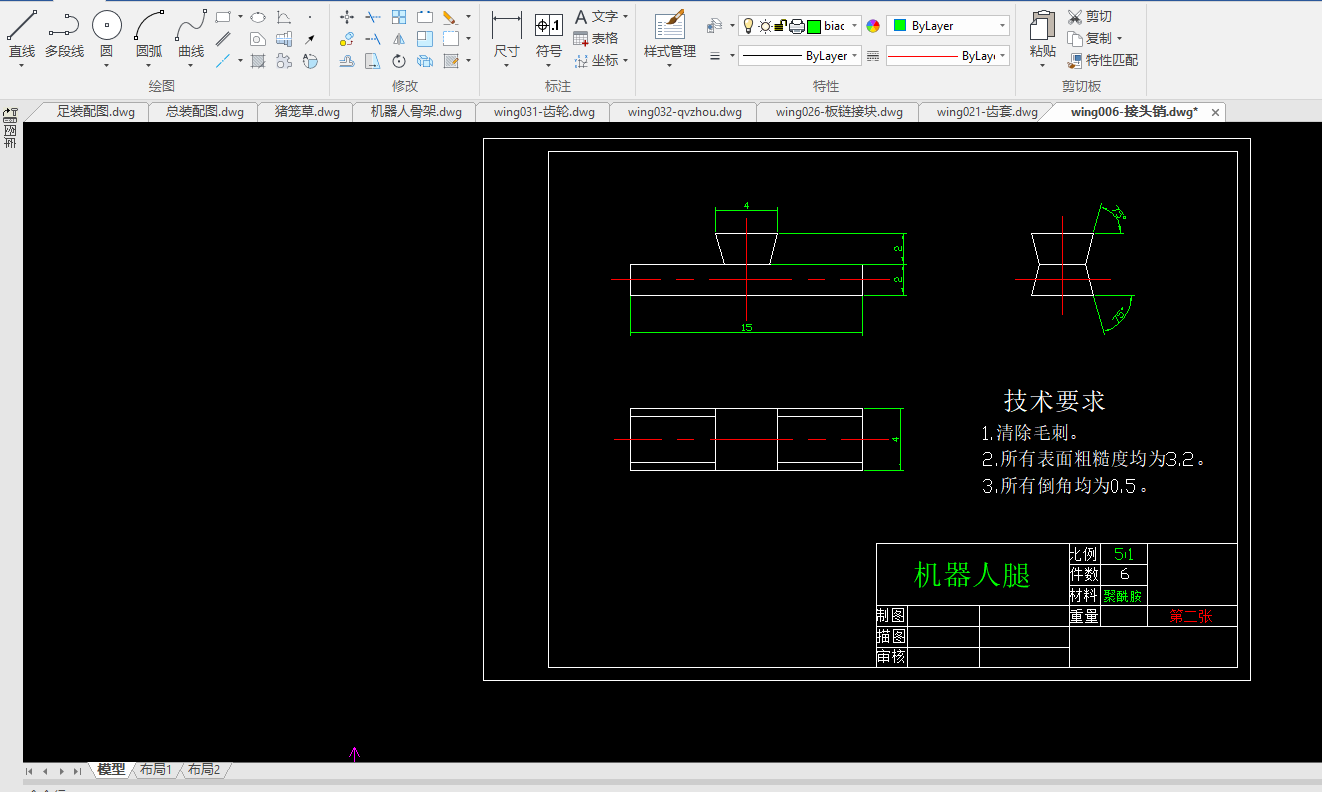
1.通过对甲虫六条腿的结构与功能的研究,设计了六足仿生机器人的足的结构,实现了机器人的结构仿生。
2.在对仿生模型的结构仿生与运动仿生分析的基础上,确定了采用慧鱼ROBO接口板作为控制器。
3.利用慧鱼ROBO接口板实现了电机和微动的控制,从而对机器人进行运动控制 。
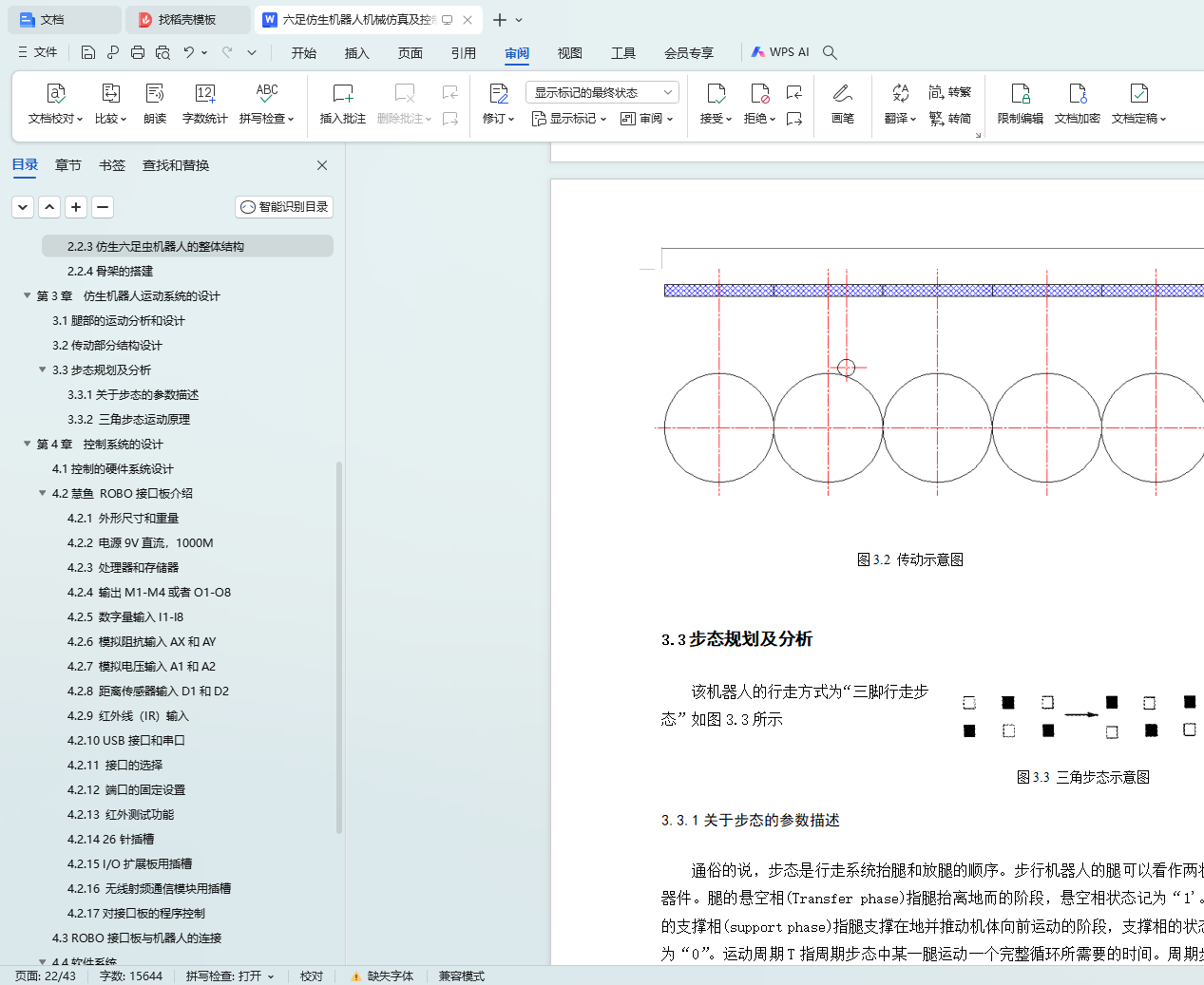
4.根据三角步态原理,设计了前进、后退以及转弯等不同运动状态。并对机器人进行了运动分析,得出了一般的结论。
5.以慧鱼公司开发的编程软件:ROBO PRO,对机器人进行软件编程,使它按规定的路线运动,实现对其运动的控制。
本次毕业设计的目的和意义是综合运用大学四年里所学到的基础理论知识达到设计目的并提高自己分析问题和解决问题的能力,提高机械控制系统设计、操纵机构的设计能力及运用PRO/E设计软件的建模能力,并增强自身的动手能力与计算机编程能力。
本课题的研究前景十分广阔。例如,可以通过对海蟹的研究,进行仿生设计,制造出海陆两用的仿生机器人,建立基于环境适应行为的智能运动控制策略。在此基础上,为未来智能化近海两栖作战新概念武器结构设计与分析提供新方法。
对于跟踪国际先进军事技术,建立新型作战武器有重要意义。同时,开展对海的
研究也可以为水下科学考察、海底探矿等领域的新型机器人的开发打下理论基础。在对未知空间的探索方面也有极大的发展空间。例如,令人讨厌的苍蝇,与宏伟的航天事业似乎风马牛不相及,但仿生学却把它们紧密地联系起来了。苍蝇是声名狼藉的“逐臭之夫”,凡是腥臭污秽的地方,都有它们的踪迹。苍蝇的嗅觉特别灵敏,远在几千米外的气味也能嗅到。但是苍蝇并没有“鼻子”,它靠什么来充当嗅觉的呢? 原来,苍蝇的“鼻子”――嗅觉感受器分布在头部的一对触角上。
每个“鼻子”只有一个“鼻孔”与外界相通,内含上百个嗅觉神经细胞。若有气味进入“鼻孔”,这些神经立即把气味刺激转变成神经电脉冲,送往大脑。大脑根据不同气味物质所产生的神经电脉冲的不同,就可区别出不同气味的物质。因此,苍蝇的触角像是一台灵敏的气体分析仪。
仿生学家由此得到启发,根据苍蝇嗅觉器的结构和功能,仿制成一种十分奇特的小型气体分析仪。这种仪器的“探头”不是金属,而是活的苍蝇。就是把非常纤细的微电极插到苍蝇的嗅觉神经上,将引导出来的神经电信号经电子线路放大后,送给分析器;分析器一经发现气味物质的信号,便能发出警报。这种仪器已经被安装在宇宙飞船的座舱里,用来检测舱内气体的成分。这种小型气体分析仪,也可测量潜水艇和矿井里的有害气体。利用这种原理,还可用来改进计算机的输入装置和有关气体色层分析仪的结构原理中。
也可以对陆生的甲虫和蜈蚣等腿部运动的分析核研究制造出相应的产品,应用于军事,工业和科研。