Sonar Target Classification UsingGenerral
Regression Neural Network
BURCU ERKMEN TULAY YILDMM
Abstract: The remote detection of undersea mines in shallow waters using active sonar is a crucial subject required to maintain the security of important harbors cost line areas. The discrimination active sonar returns form mines and returns form rocks on the sea floor by human experts is usually difficult and very heavy workload. Neural network classifiers have been widely used in classification of complex sonar signals due to its adaptive and parallel processing ability. In this paper General Regression Neural Network (GRNN) is used to solve the problem of classification underwater targets. Principal Component Analysis (PCA) has been established as a feature extraction method to improve classification performance.Receiver Operating Characteristic (ROC) analysis has been applied to the neural classifier to evaluate the sensitivity and spscificity of diagnostic procedures.
1.Introduction
Automatic identification and classification of underwater signals on the basis of sonar signals are complex problem due to the complexity of the ocean environment. Identification by human experts is usually not objective and a very heavy workload. Neural Networks with their adaptive and computational advantages appear to be ideally suited to active sonar classification. The pioneer paper by Gorman and Sejnowski [1],[2] was perhaps the first papers which reported the application of neural networks to this area. They used simple spectral features as the input to the neural-network classifier in order to distinguish a mine form cylindrical shape rock positioned on a sandy ocean floor. After these pioneer papers, these has been growing interest in the use of networks for the automatic recognition of sonar targets. Multi-lay Perceptron (MLP) classifier [1]-[7], Radial Basis Function Networks (RBFN) [3],[8],General Regression Neural Networks [9], and the Probabilistic Neural Networks (PNN) [3] have been the efficient Feed-Forward Neural Networks widely used to classify sonar signal in literature.
Feature extraction is the important preprocessing step to classification of complex signal such vision , speech identification or the problem mentioned here of detecting objects in sonar returns. Input dimensionality of these problem becomes a serious drawback to classification. Feature extraction techniques such as PCA, and Neural Discriminating Analysis (NDA) reduce a high dimensional signal to a lower dimensional feature set which preserves the most useful and relevant information on the feature space. In [10] ,[11], several feature extraction techniques were used to preprocess given sonar signals.
In this work , General Regression Neural Network (GRNN) has been used to classify sonar returns form tow different targets on the sandy ocean bottom a mine and cylindrical shaped rock. The emphasis in here is not classifier itself but also the process of the feature extraction technique , used PCA , improves classifier performance. In this paper, the ROC (Receiver Operating Characteristic ) analysis [12] has also been applied to the neural classifier to show the correctness of classification . ROC analysis is an established method of measuring diagnostic performance in sonar studies.
2.About G orman and Sejnowski�� Data
The dataset, which is the original data used by Gorman and Sejnowski [1],[2], was taken from the University of California collection of machine-learning-databases.
The data consist of sonar returns collected form tow sources: a metal cylinder and similarly shaped rock. Both objects were lying on a sand surface,and the sonar chirp projected at them form different angles (aspect-angles) produced the variation in the data. In G&S experiment, the data was filtered and spectral envelope of 60 samples patterns obtained by bouncing sonar signals off a metal cylinder at various angles and under varivious conditions and 97 patters obtained form rocks under similar conditions. The transmited sonar signal is a frequerce-modulated chirp,rising in frequercy, The data set contain signals obtained form a variety of different aspect angles, spaaing 90 degrees for the cylinder and 180 degrees for the rock . There are 208 sampes in total in the data file ,which are sorted in increasing order of aspect-angle.
3.General Regression Neural Network (GRNN)
General Regression Neural Network (GRNN) are memory-based feed forward networks based on the estimation of probability density functions. GRNN is a kind of Radial Basis Function network (RBF) and it is ofen used for function approximation. GRNNs feature fast training times , can model non-linear function ,and have been shown to perform well in noisy environments given enough data . Originally developed in the statistics literature and known as Nadaraya-Watson kernel regession . It was re-discovered by Donald Specht in 1990. The GRNN topologfy consists of 4 layers : the input layer, the hidden layer , the summation layer, and the output. The primary advantage of the GRNN is the speed at which the network can be trained . Training a GRNN is performed in one pass. It dose not require an iterative training procedure as in MLP. It approximates any arbitrary function betweet input and output vectors, drawing the function estimate directly from the training data. Furthermore, it is consistent; that is, as the traing set size becomes large, the estimation error approaches zero; with only mild restrictions on the function. The GRNN is used for estimation of continuous variables, as in standar regression techniques. It is related to the radial basis function network and is based on a standard statistical technique called kernel regression. GRNN architecture is show in Figure 1. The detail information about GRNN architecture and some mathematical calculations can be examined in the Specht�� paper [13].
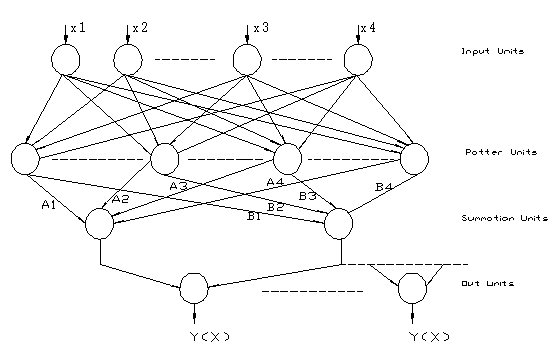
Fig.1. GRNN architecture
4.Traditional Principal Component Analysis
Principal Component Analysis is a multivariable ststistical analysis technique of data compression and feature extraction. Envisaging practical applications that require online operations for the classifier, an attractive approach for the classifier design is to reduce the dimensionalityof the N-dimensional input space by projecting input data onto a reduced a number of M diretions (M<<N) that can facilatate the classification task. The PCA describes the original data space in a base of eigenvectors ( computed from process covariance matrix ). The corresponding eigenvalues account for the energy of the process in the eigenvector directions. Considering data projection restricted to the M eigenvectors with highest eigenvalues, an effective reducetion on dimensionalality of original data input space can be achieved, with minimum information loss [10] . The detail calculations about PCA can be found in [14].
5.Simulation Results
The aim of this study is to employ General Regression Neural Networks to classify sonar returns. To improve classification performance and simplify network complexity, PCA is used as feature extraction method. Classification was performed by using MATLAB 6.0 and Neural Network Toolbox. The data set consists of 208 returns (111 cylinder shaped mine returns and 97 rock returns). The entire data set was split into randomly train and test sets (103 samples for training file, 105 samples for test file ). The network used here was based on a fully-connedcted feed-forward neunal network composed of 60 input nodes and an output node.
In the first step of this study, GRNN without using feature extraction method has been applied sonar data. Performance of GRNN is affected by the choice of spread parameter ,The spread value was optimally found as 0.06. The achieved performance parameter by GRNN classifier, without using PCA ,is given in Table 1.
Table 1. The percentages of correct classification for GRNN without suing PCA
|
CLASSES OVERALL
|
|
%of correct %of correct %of correct
��mine�� estimation ��rock�� estimation classification
|
|
Train Test Train Test Train Test
100 92.06 100 90.48 100 91.42
|
In the second step ,PCA has been applied to the data set which has 60-dimensional input space. The maximun accuracy on the test results is achieved when 60-dimensional input spoace is reduced to 20-dimensional input space PCA preprocessing. Table 2 shows the classification performances of the GRNN classifier foy the same spread value.
Table 2. The percentages of correct classification for GRNN with suing PCA
|
CLASSES OVERALL
|
|
%of correct %of correct %of correct
��mine�� estimation ��rock�� estimation classification
|
|
Train Test Train Test Train Test
100 93.65 100 92.85 100 93.33
|
Comparison the results of the Table 1 and Table 2 demonstrates that classification performance of GRNN classifier can be improved suing PCA. Fuethmore , the low computational COMPLEXITY Achieved by PCA provides the GRNN classifier for online operations.
Finally, ROC analysis has been applied to test results of GRNN classifier. The evaluation criteria of ROC analrsis in sonar detection indicate the trade-off of probability of detection versus probability of fasle detection. Sensitivity and specificity are the basic expressions (Eq.1.and Eq.2.) for the diagnostic test interpretation of the ROC analysis . Table 3is employed for these calculations .Table 3 labeled with classification results on the left side and mine absent/present status on the top .
|
|
Mine Present
|
Rock Present
|
|
The Result of Classifier
��Mine��
|
True Positives
(TP)
|
Fasle
Positives
(FP)
|
|
The Result of Classifier
��Rock��
|
Fasle Positives
(FP)
|
True
Positives
(TP)
|
Table 3. Diagnostic test interpretation table
TP: 59 FP: 3 FN: 4 TN: 39
number of true positive
 Sensitivity= =0.9365
Sensitivity= =0.9365
number of true positive + number of false negatives
number of true negatives
 Specificity= =0.9285
Specificity= =0.9285
number of true negatives + number of false negatives
6.CONCLUSION
In this paper , a GRNN has been used to classify underwater target collected from two sources: a metal cylinder and similarly shaped rock . The emphasis in here is not classifier itself but also the process of the feature ex traction technique, used PCA , improves classifier performance. The low computational complexity achieved by PCA helps designing compact neural classifier ,which is attractive for online operations and hardware realizations. When the performance of GRNN using with PCA are compared with the previous studies in terms of successful classification rates, this result is better than those with the accuracies of maximum 90.4% [1] and ROC analysis results which is close to 1 (sensitivity and specificity ) shows the reliability of this classification.
Refernces
1. Gorman R.P.;Sejnowski T.J.,(1988). Learned classification of sonar targets using a massively parallel network. IEEE Transaction on Acoustics, Spech, and Signal Processing, Vol. 36, No.7,pp. 1135-1140.
2. Gorman R.P.;Sejnowski T.J.,(1988). Analysis of hidden units in a layered network trained to classify sonar targets. Neural Netwoeks, Vol 1,No1,pp.75-89.
3. Chen, C.H.(1992). Neural Netwoeks for active sonar classification. Pattern Recogceedings., Vol.II. Conference B :Pattern Recognition Methodology and Systems, Proceedings.,11th IAPR International Conferene on,pp. 438-440.
4. Diep, D.; johannet, A.; Bonnefoy, P.; Harroy, F.; Loiseau, P., Classification of sonar data for a mobile robot using nearal network .(1998) Intelligence and Systems, Proceedings., IEEE International Joint Symposia on, pp. 257-260.
5. Haley ,T.B.,(1990). Applying nearal network to automatic activ classification. Pattern Recognition, Proceedings ., 10th International Conferene on,Vol: 2, pp. 41-44
6. Shazeer, D.J.; Bello, M.G., Minehunting with multi-layer perceptrons. (1991) Neural Network for Ocean Engineering ,1991, IEE Conference on ,pp. 57-68.
7. YuWang Jing; EI-Hawaey, F.;A multilayered ANN architecture for underwater target tracking.(1994). Electrical and Computer Engineering , Conference Proceedings. 1994 Canadian Conference on, Vol .2pp. 785-788.
8. Yegnanaray,B.; Chouhan,H.M.; Chandra Sekhar, C., sonar target recoginting using radial basss functiong networks. (1992). Singapore ICCS\ISITA ��92. ��Communications on the Move��, vol.1,pp.395-399.
9. Kapanoglu B., Yildmm T., Generalized Regression Neural Netwoeks Ror Underwater target Classification. Neu-Cee2004 2nd International Symposia on Electrical and Computer Engineering, Nicosia ,North Cyprus, pp:223-225.
10. Soares �CFilho, W.; Manoel de Seixas, J.;Perira Caloba, L.; Principal componefnt analysis for classifying passive sonar sigals.(2001). Circuits and Systems ,ISCAS 2001. The 2001 IEEE International Symposia on,Vol. 3, pp. 592-595.
11. Larkin ,M.J.; Optimal feature extraction techniques to improve Classification performance , with application to sonar signals .(1997) Neural Networks for Signal Processing VII .Proceedings of the 1997 IEEE Workshop ,pp. 64-71.
12. Woods, k.s.; bowyer,K.W., Generating ROC curves for artificial neural networks .(1994) Computre-Based Medical Systems, Proceedings 1994 IEEE Seventh Symposium on, pp. 201-206.
13. Specht D.F.,(1991) Ageneralized regression neuralnetwoeks . IEEE Transations on Neural Networks .Vol. 6, pp. 568-576.
14. Song W.; Shaowei X., ROBUST PCA Based on Neural Networks .(19970 Proceedings of the 36th Conferenc on Decision&Control San Diego , California USA ,pp.
