摘 要
随着机器人技术的飞速发展,工业机器人的应用领域正在不断的扩大,对应用需求提出了新的要求,为提高机器人应用的水平,我们研制了一套机器人系统。
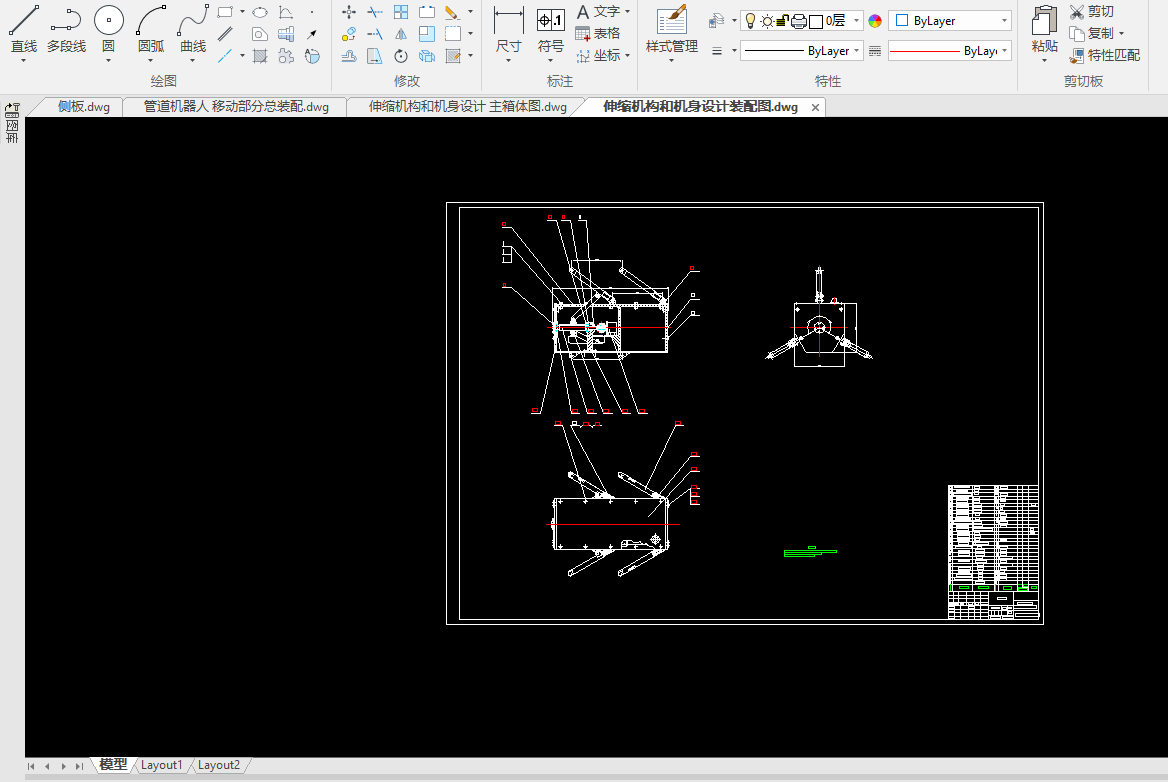
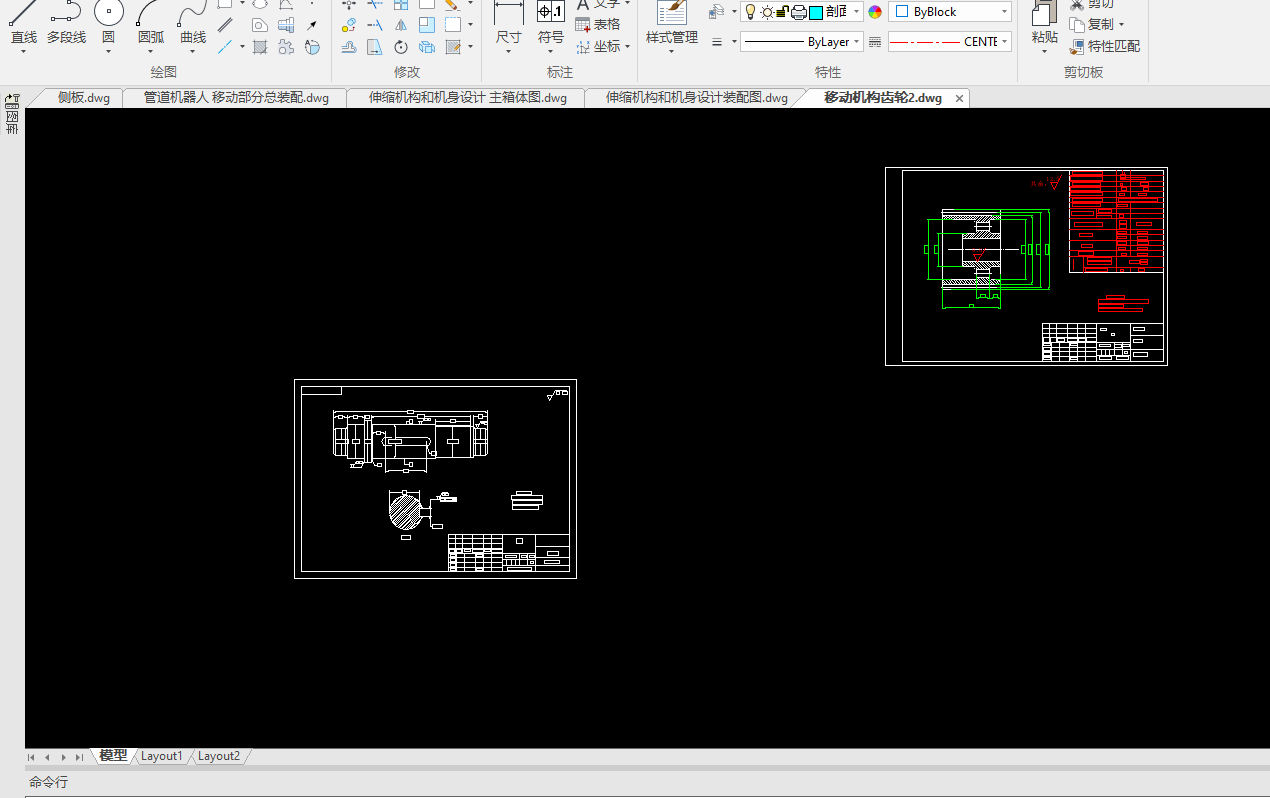
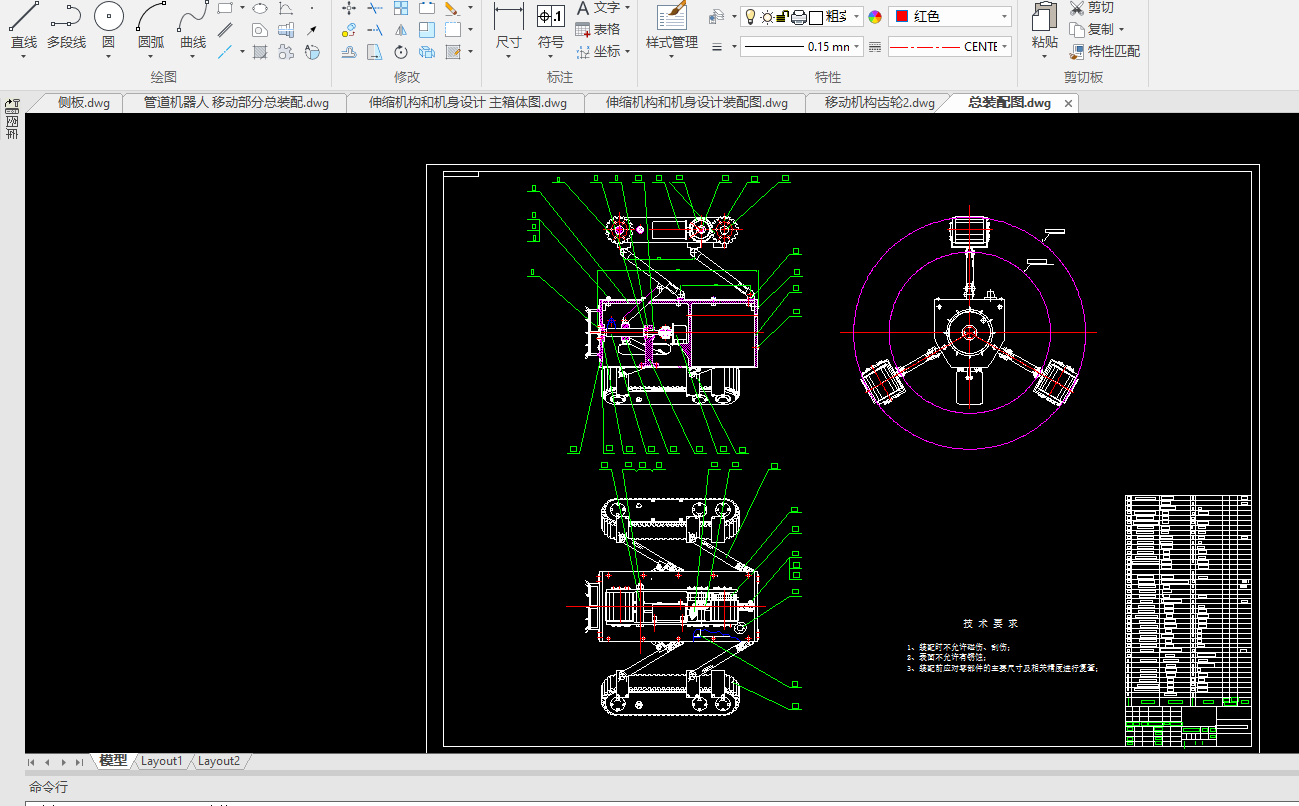
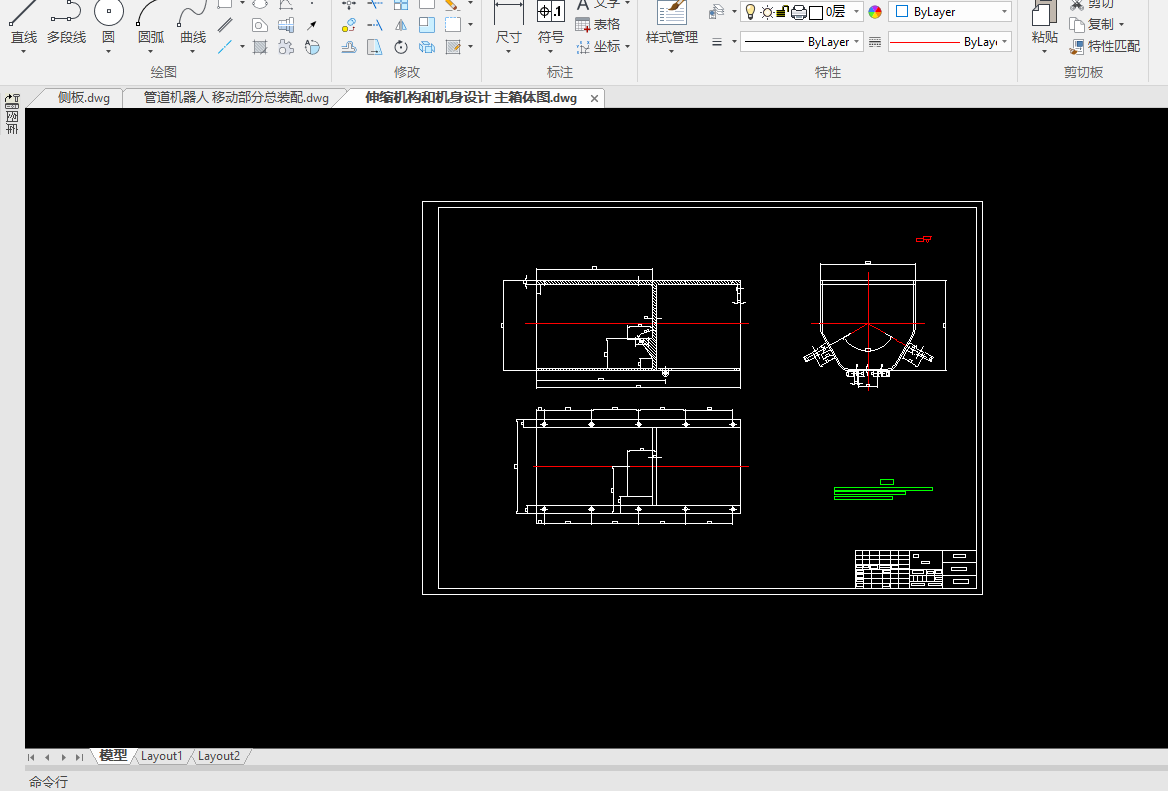
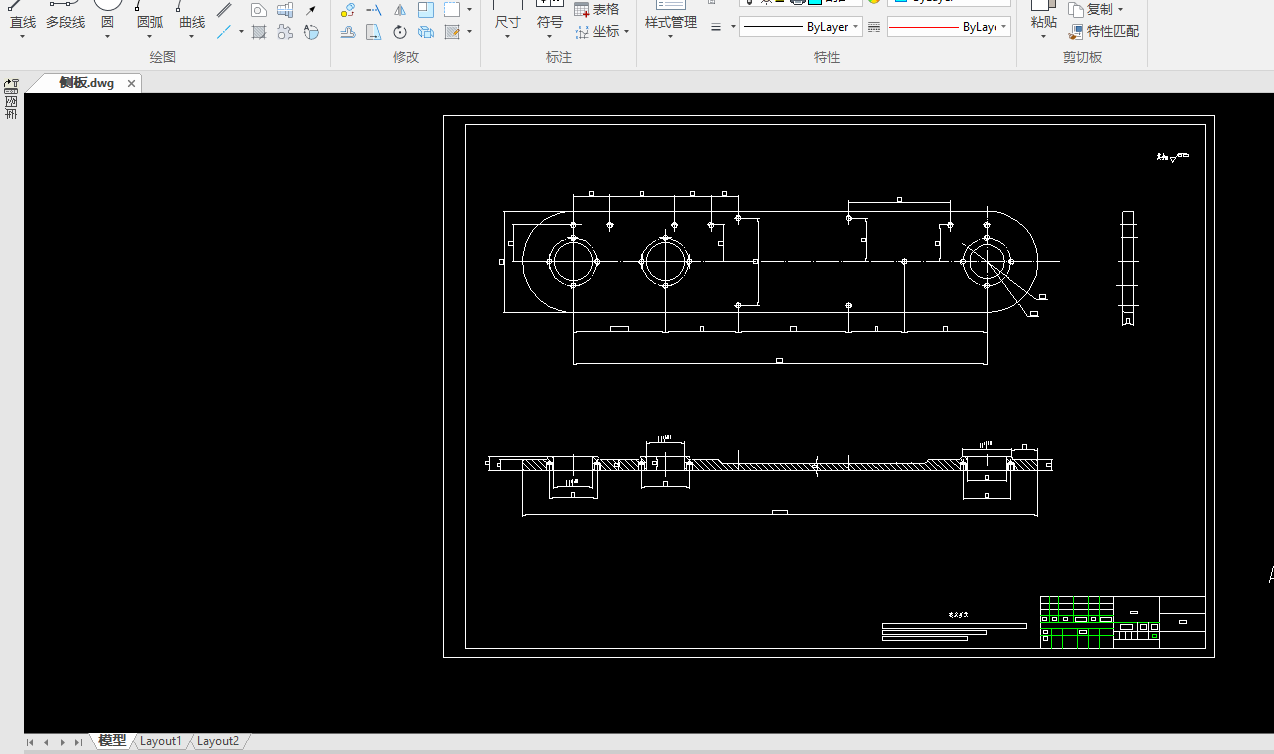
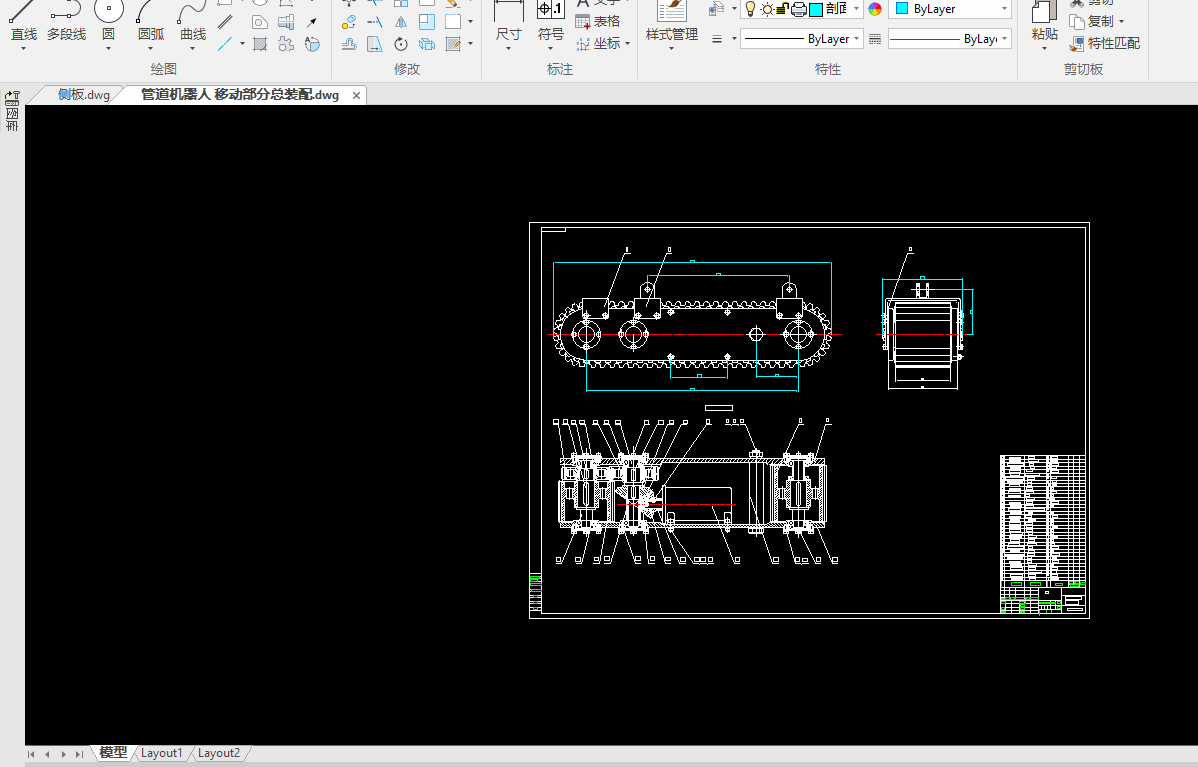
本文阐述了机器人的发展历程,国内外的应用现状,及其巨大的优越性,提出具体的机器人设计要求,进行了本演示系统的总体方案设计和各自由度具体结构设计、计算;最后设计伸缩机构和机身设计。
关键字:管道机器人、结构设计、机械结构
Abstract
With the rapid development of the technology of the industrial robot, robot application field is constantly expanding, to application demand put forward new demands, in order to improve the application level, we developed a set of in pipe clearing ash robot system for the purpose of.
This paper describes the development of robot, application status at home and abroad, and its great superiority, puts forward the specific robot design requirements, for the demonstration of the overall scheme of the system design and the various degrees of freedom specific structure design, final design calculation; telescopic mechanism and machine design.
Key Words: Pipeline robot, structure design, mechanical structure
目 录
摘 要
Abstract
目 录
第1章 绪论
1.1 机器人概述
1.2 机器人的历史、现状
1.3机器人发展趋势
1.4 本课题研究的内容与要求
第2章 机器人总体方案设计
2.1总体设计的思路
2.2 设计方案过程及特点
2.3 总体结构的设计和比较
2.3.1 行走机构的设计
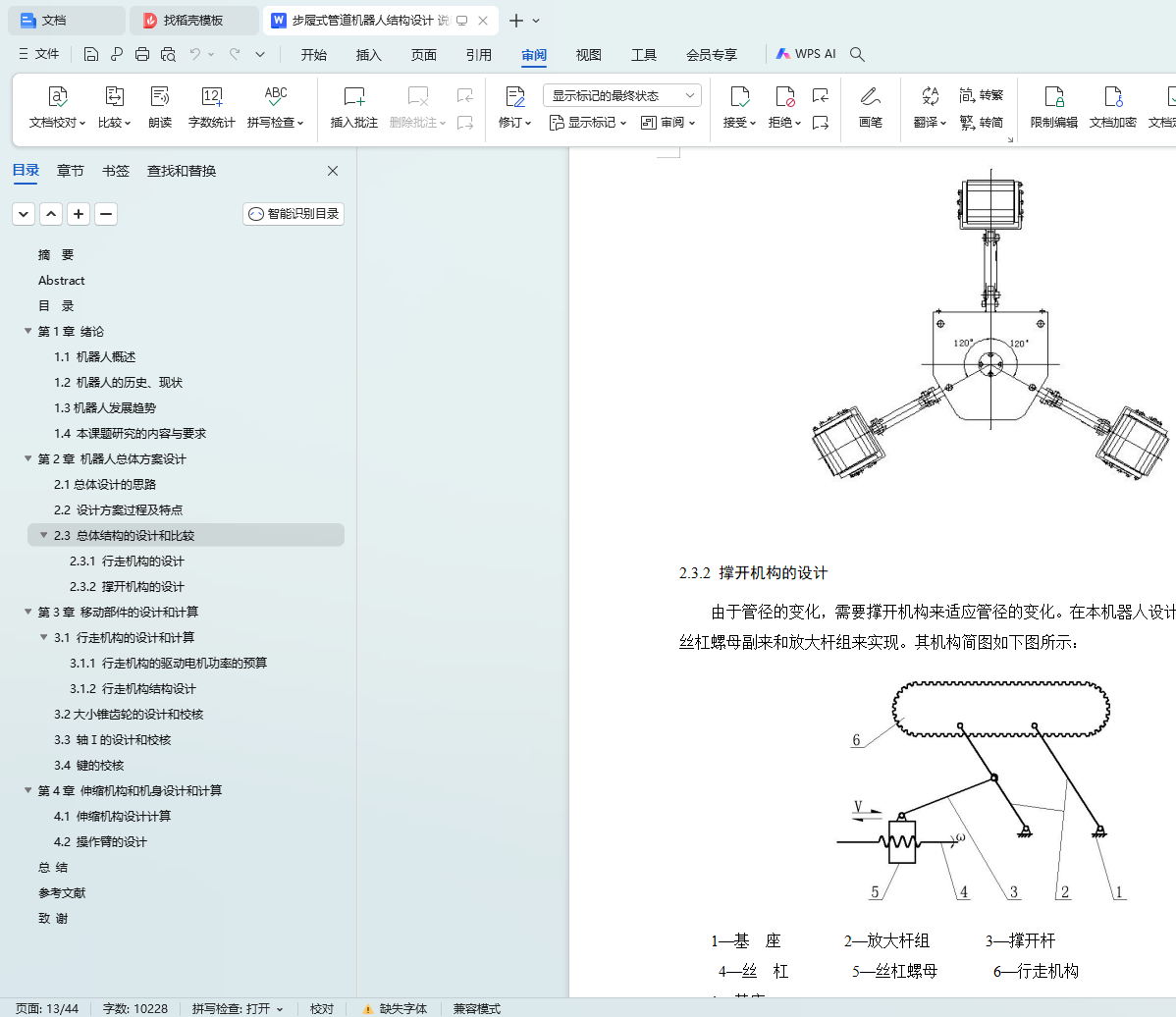
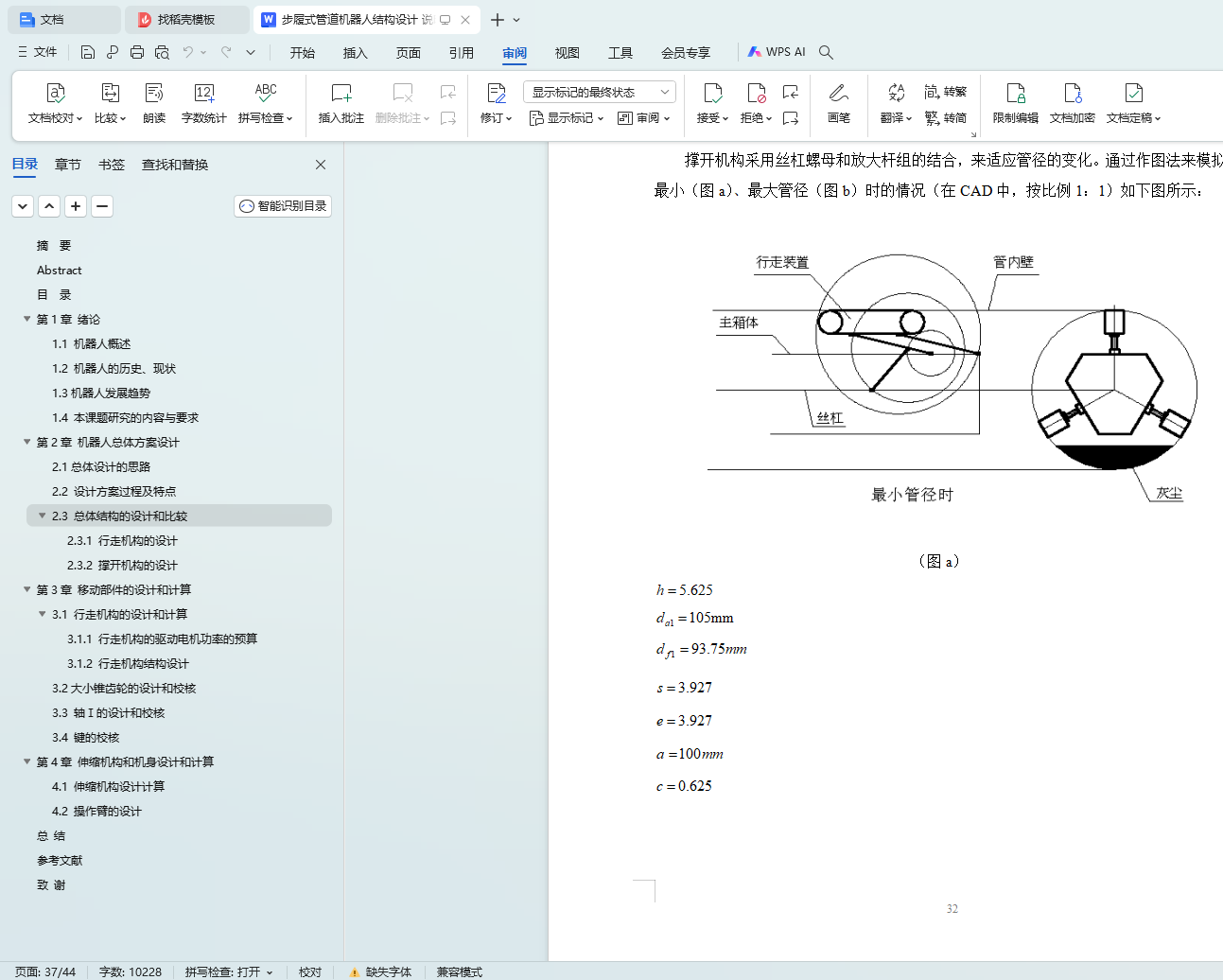
2.3.2 撑开机构的设计
第3章 移动部件的设计和计算
3.1 行走机构的设计和计算
3.1.1 行走机构的驱动电机功率的预算
3.1.2 行走机构结构设计
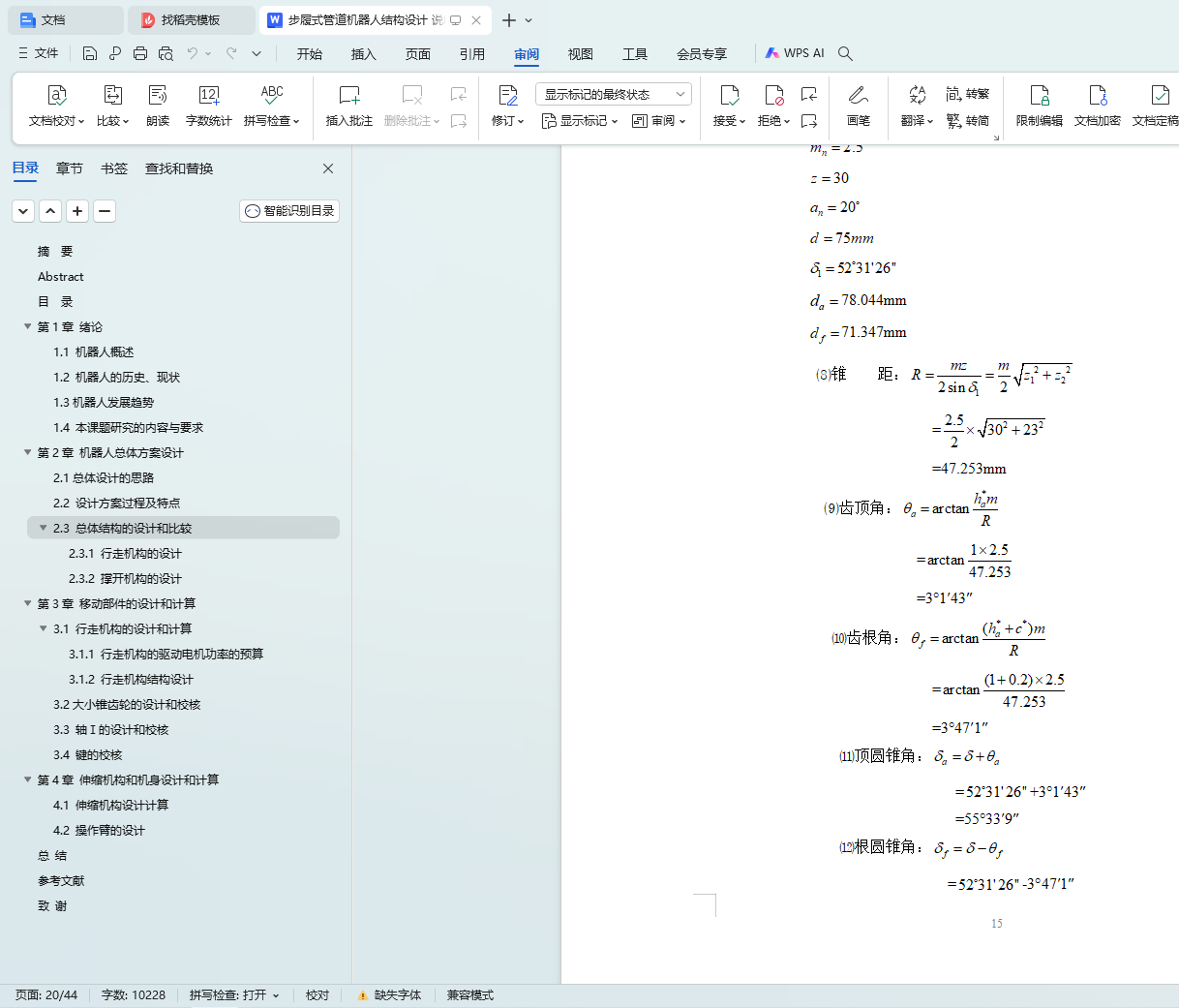
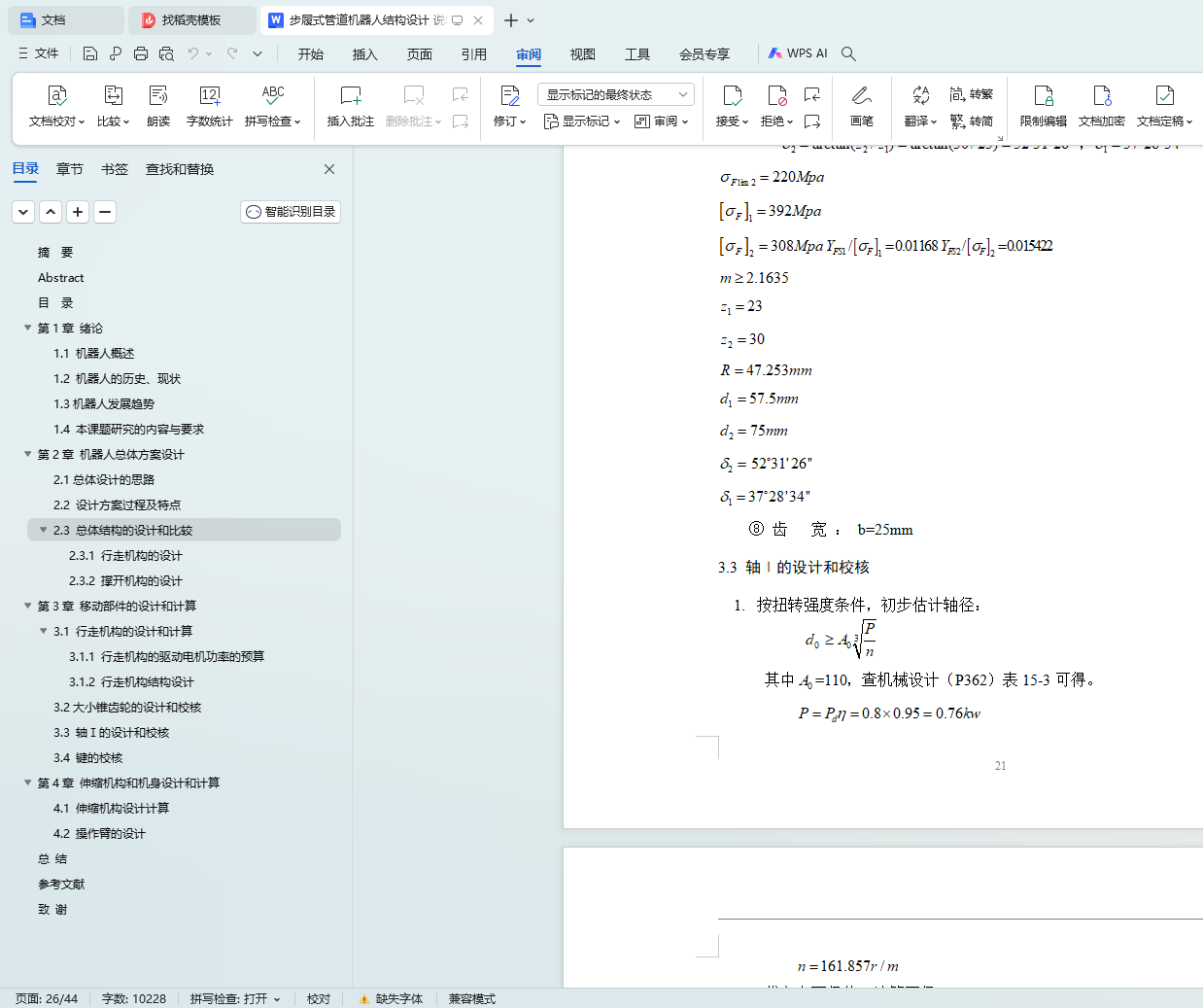
3.2大小锥齿轮的设计和校核
3.3 轴Ⅰ的设计和校核
3.4 键的校核
第4章 伸缩机构和机身设计和计算
4.1 伸缩机构设计计算
4.2 操作臂的设计
总 结
参考文献
致 谢