摘 要
随着中国物流量的加大,大型货车数量也迅猛增加。由于大型货车的车身较长,转弯时其前后轮的运行轨迹不同,形成较大的内轮差,由此产生危险区域,进人这个区域的行人和非机动车很容易被车身后半部卷人,导致严重的交通事故。据不完全统计,在大型车辆发生的恶性交通事故中,内轮差引发的事故占 70%以上,绝大多数发生在车辆右转弯时,事故死亡率高达 90%以上。针对上述问题本文设计并实现了一种基于物联网技术的内轮差智能防护系统,车辆安装次系统后,在一定情况在会威胁到他人生命安全时,会及时通知驾驶者注意车辆侧边行人或者车辆防止出现安全事故,保障他人生命安全。
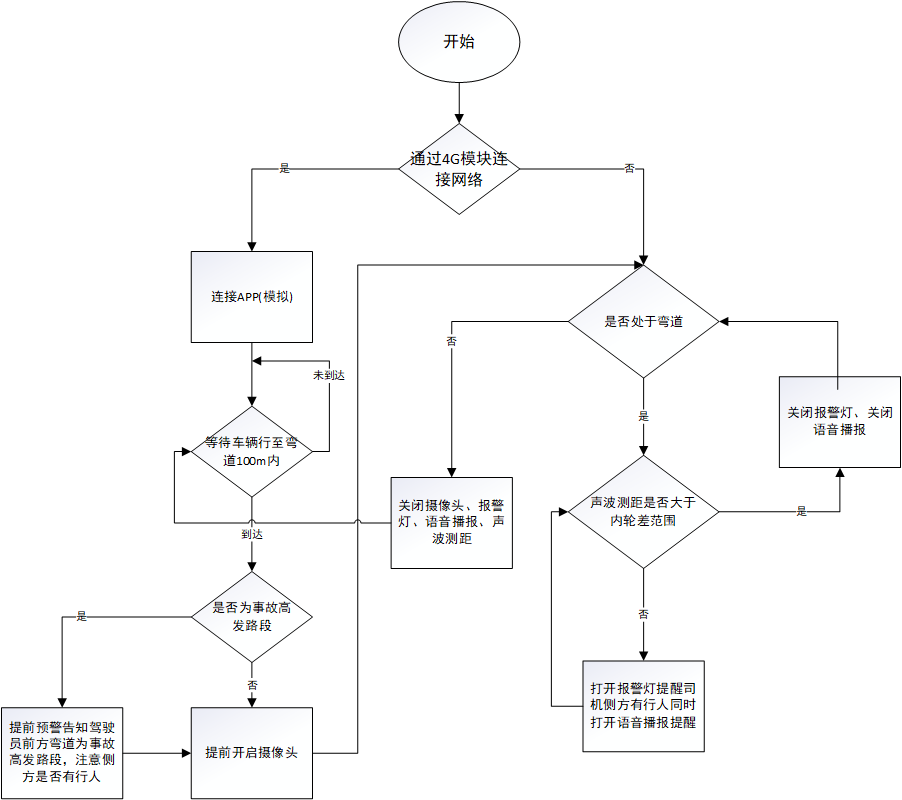
本系统采用4G模块对网络进行连接,但网络连接成功后连接App等待车辆行驶弯道100米内若未到达100米持续检测若到达100米以内判断是否路段为事故高发路段,若是高发路段,提前告知驾驶员前方弯道为事故高发路段注意侧方是否有行人,并且打开摄像头当非事物高发路段时,提前开启摄像头,并判断是否处于弯道,若不处于弯道则返回上层等待车辆行驶弯道100米内,若是弯道则打开超声波测距测量是否大于内容范围,若大于内轮差范围则关闭报警能关闭语音播报,若小于内容差范围则打开报警提示司机次侧方有行人同时打开语音播报提醒,保障行人生命安全。
关键词:内轮差、北斗、机器视觉、智能防护
ABSTRACT
With the increase of logistics volume in China, the number of large trucks is also rapidly increasing. Due to the long body of a large truck, the running trajectory of its front and rear wheels is different when turning, forming a large inner wheel difference, which creates a dangerous area. Pedestrians and non motorized vehicles entering this area are easily rolled up by the rear half of the vehicle body, leading to serious traffic accidents. According to incomplete statistics, in malignant traffic accidents involving large vehicles, accidents caused by inner wheel differences account for more than 70%. The vast majority of accidents occur when vehicles turn right, with a mortality rate of over 90%. This article designs and implements an intelligent protection system for inner wheel difference based on Internet of Things technology to address the above issues. After installing the secondary system on the vehicle, in certain situations where it may threaten the safety of others, the driver will be promptly notified to pay attention to pedestrians or vehicles on the side of the vehicle to prevent safety accidents and ensure the safety of others.
This system uses a 4G module to connect to the network, but after a successful network connection, it connects to the app and waits for the vehicle to travel within 100 meters of the curve. If it does not reach 100 meters, it continues to be detected. If it reaches within 100 meters, it determines whether the road section is a high-risk accident section. If it is a high-risk accident section, the driver should be informed in advance that the curve ahead is a high-risk accident section, and attention should be paid to whether there are pedestrians on the side. When the road section is not a high-risk accident section, the camera should be turned on in advance, And determine whether it is in a bend. If it is not in a bend, return to the upper level and wait for the vehicle to travel within 100 meters of the bend. If it is in a bend, turn on the ultrasonic distance measurement to check if it is greater than the content range. If it is greater than the inner wheel difference range, turn off the alarm to turn off the voice broadcast. If it is less than the content difference range, turn on the alarm to remind the driver that there is a pedestrian on the second side, and turn on the voice broadcast to remind the driver to ensure the safety of pedestrians.
KEYWORDS: Inner wheel difference, Beidou, machine vision, intelligent protection