摘 要
随着物联网和智能科技,无人驾驶和智能物流技术已跃然成为科技界的前沿焦点。在这一背景下,超宽带(UWB)技术以其高精度定位和低功耗特性,在智能设备定位与通信领域展现出巨大的应用潜力。特别是当UWB技术与智能行李车相结合时,其自主导航能力得到了显著提升,实现了精准定位和高效运输的双重目标。
本智能行李车作为一种新型物流运输工具,UWB技术的应用,为智能行李车提供了更精准的位置数据,使其能够在狭小空间或密集人群中实现精确导航,避免行李的碰撞和丢失,SLAM技术的使用,通过集成多种传感器和智能算法,能够自主识别路径、规避障碍,并在复杂环境中完成行李的运输任务。
最后,从大量的图片、表格和场景模拟图中可以看出,本智能行李车完全能够准确跟随使用者,完成位置信息的显示,能够进行行李的运输,进而说明本系统已经满足实际需求。
关键词:UWB;SLAM;智能行李车
ABSTRACT
With the rapid development of the Internet of Things and intelligent technology, unmanned driving and intelligent logistics have become current research hotspots. Among them, Ultra-Wideband (UWB) technology, with its high-precision positioning and low power consumption characteristics, has demonstrated significant potential for application in the field of intelligent device positioning and communication. By integrating with intelligent luggage carts, UWB technology can significantly enhance the autonomous navigation capabilities of the carts, enabling precise positioning and efficient transportation.
The intelligent luggage cart, as a new type of logistics transportation tool, integrates various sensors and intelligent algorithms to autonomously identify paths, avoid obstacles, and complete luggage transportation tasks in complex environments. The application of UWB technology provides more precise positioning data for the intelligent luggage cart, enabling precise navigation in confined spaces or dense crowds, thus avoiding collisions and losses of luggage.
The combination of UWB technology and intelligent luggage carts not only drives technological innovation in the field of intelligent logistics but also brings revolutionary changes to modern transportation and logistics industries. In the future, with the continuous improvement of technology and the expansion of application scenarios, UWB+SLAMintelligent luggage carts will play an increasingly important role in multiple fields such as intelligent transportation and smart logistics.
KEYWORDS: Ultra-Wideband;Simultaneous Localization and Mapping;intelligent luggage carts
目 录
1绪 论
1.1研究背景和意义
1.1.1研究背景
1.1.2研究意义
1.2国内外研究现状
1.2.1国内外UWB定位技术研究现状
1.2.2机场智能车研究现状
1.2.3国内外SLAM地图研究现状
1.2.4研究现状评述
1.3主要研究内容
1.3.1研究内容
1.3.2 研究思路
2 系统关键技术
2.1 信息采集与执行子系统
2.1.1 SLAM技术
2.1.2 UWB三边定位
2.1.3 语音识别技术
2.2网关子系统
2.2.1 WIFI通信技术
2.2.2 MQTT技术
2.2.3串口通信技术
2.3云平台
2.3.1 Android开发技术
2.3.4 数据库技术
3系统需求分析与设计
3.1需求分析
3.1.1 功能性需求分析
3.1.2非功能性需求分析
3.2系统总体设计方案
3.2.1 系统总体模块架构设计
3.2.2 系统总体流程
3.3信息采集与执行子系统设计
3.3.1 双目摄像头模块设计和SLAM激光雷达模块设计
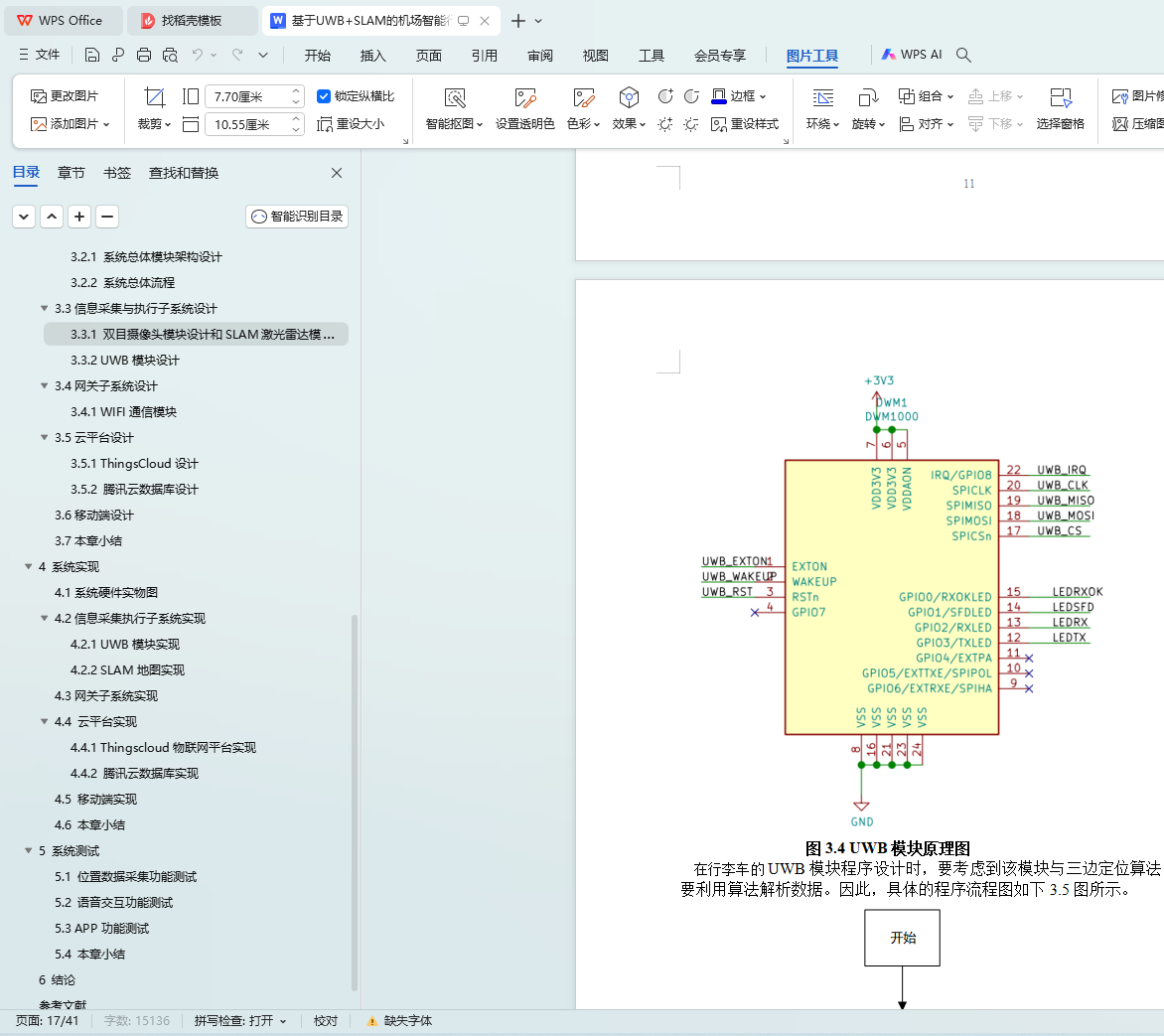
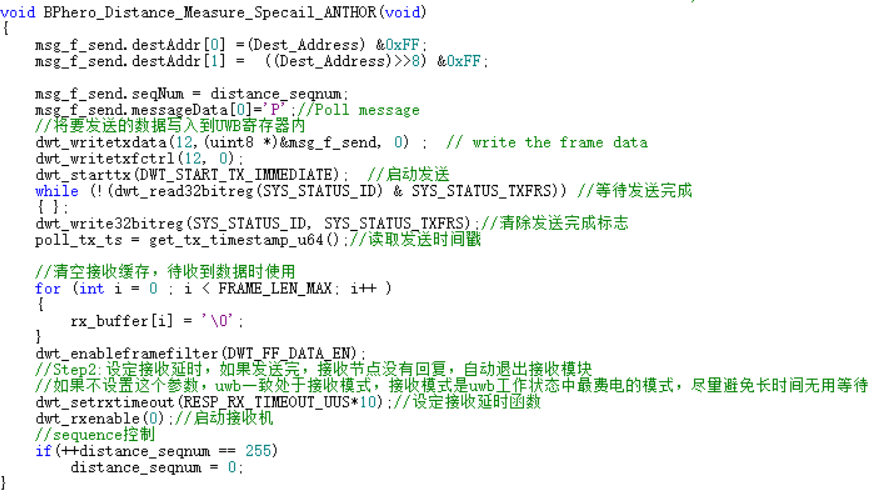
3.3.2 UWB模块设计
3.4网关子系统设计
3.4.1 WIFI通信模块
3.5云平台设计
3.5.1 ThingsCloud设计
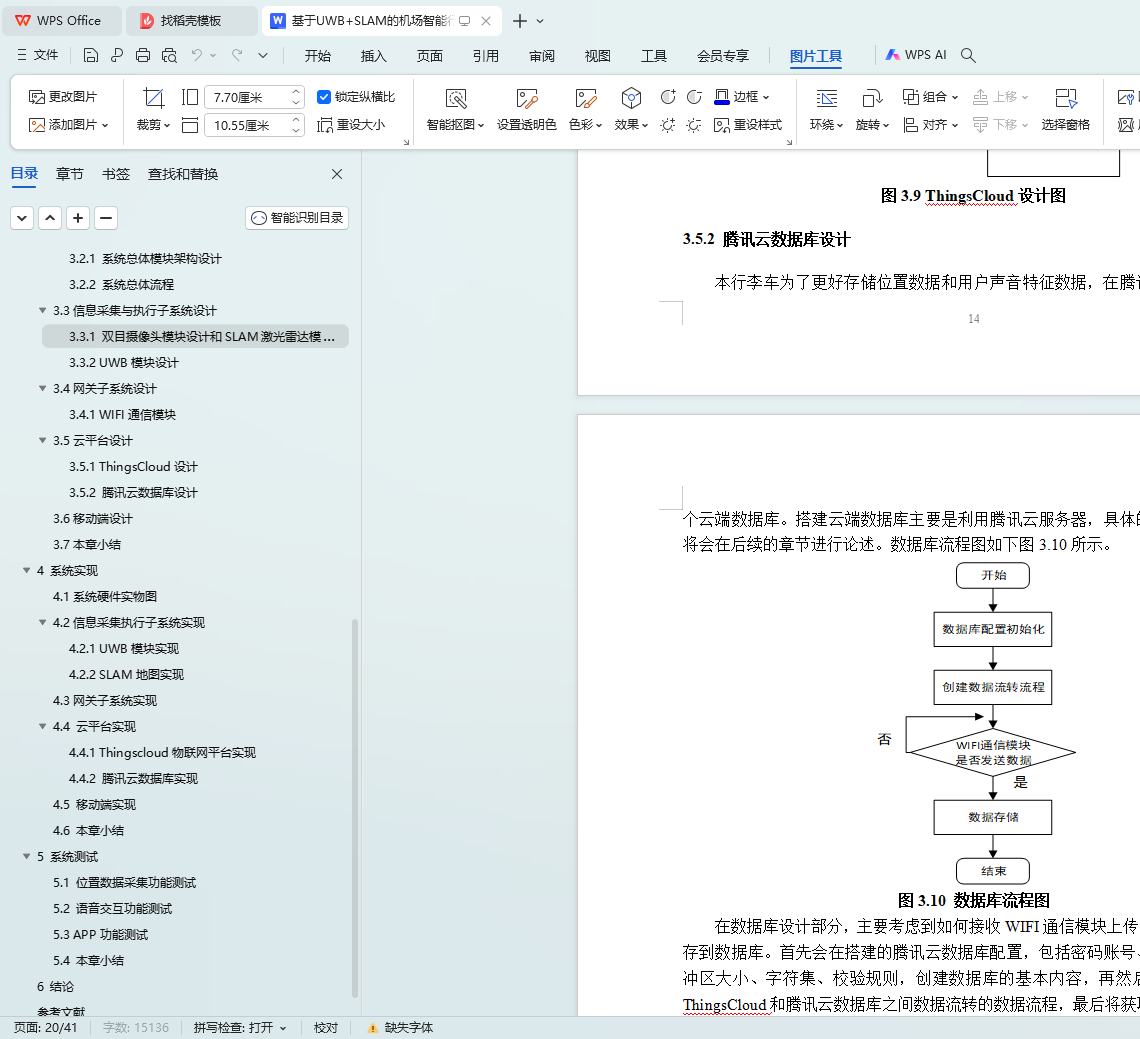
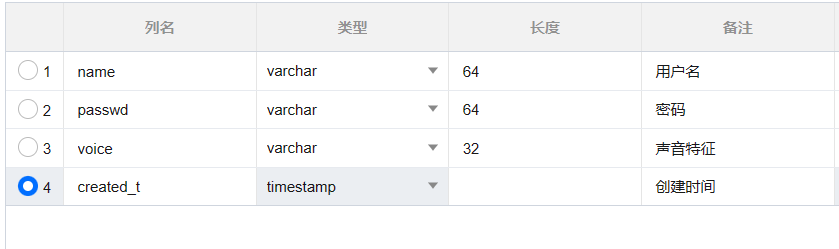
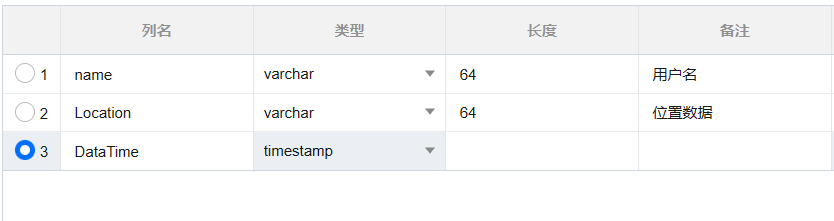
3.5.2 腾讯云数据库设计
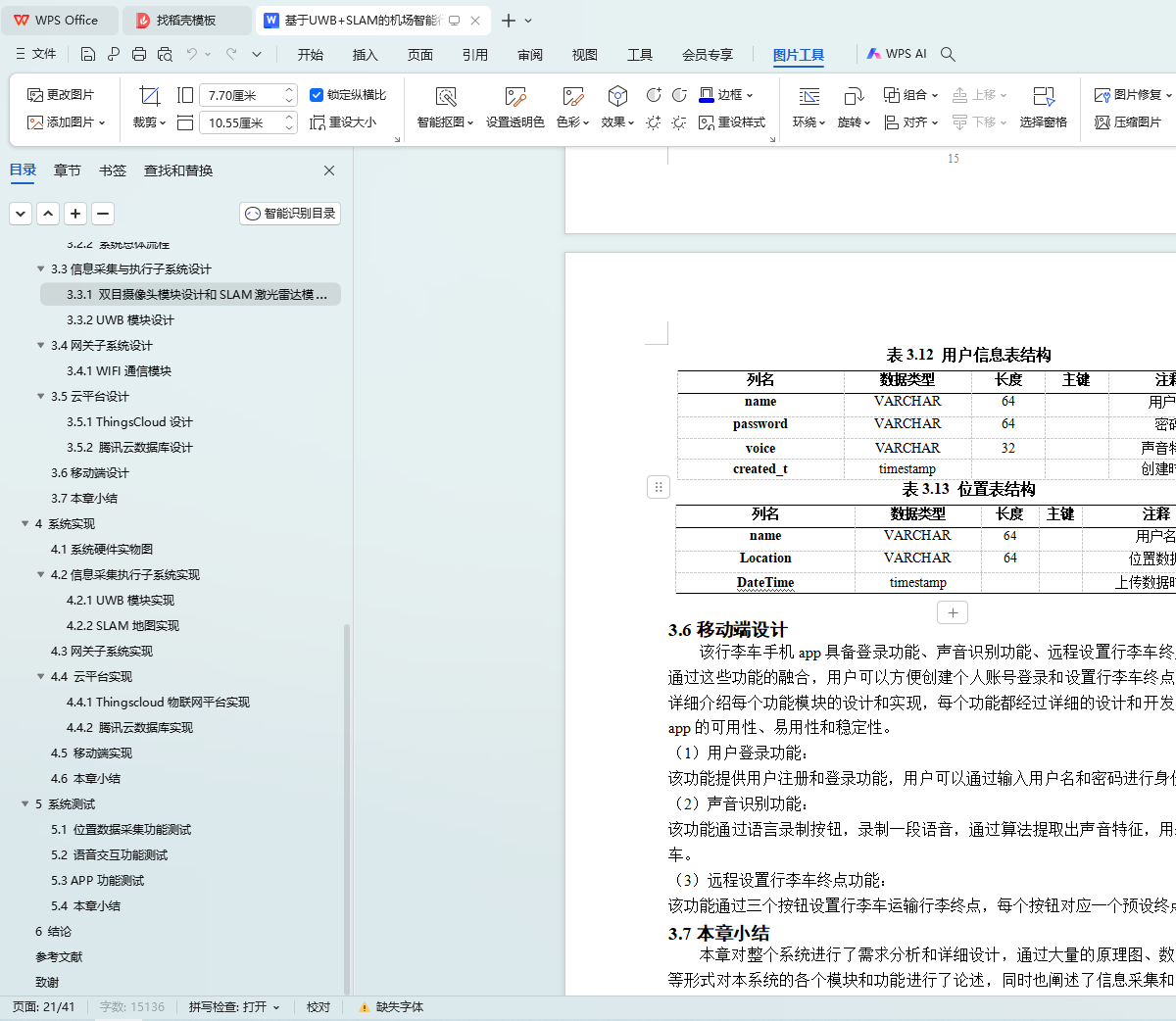
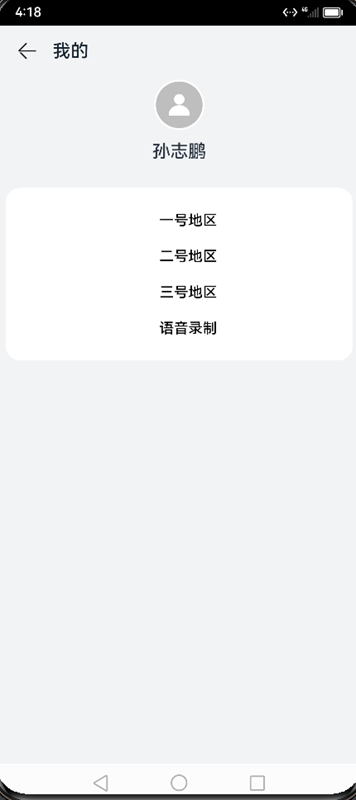
3.6移动端设计
3.7本章小结
4 系统实现
4.1系统硬件实物图
4.2信息采集执行子系统实现
4.2.1 UWB模块实现
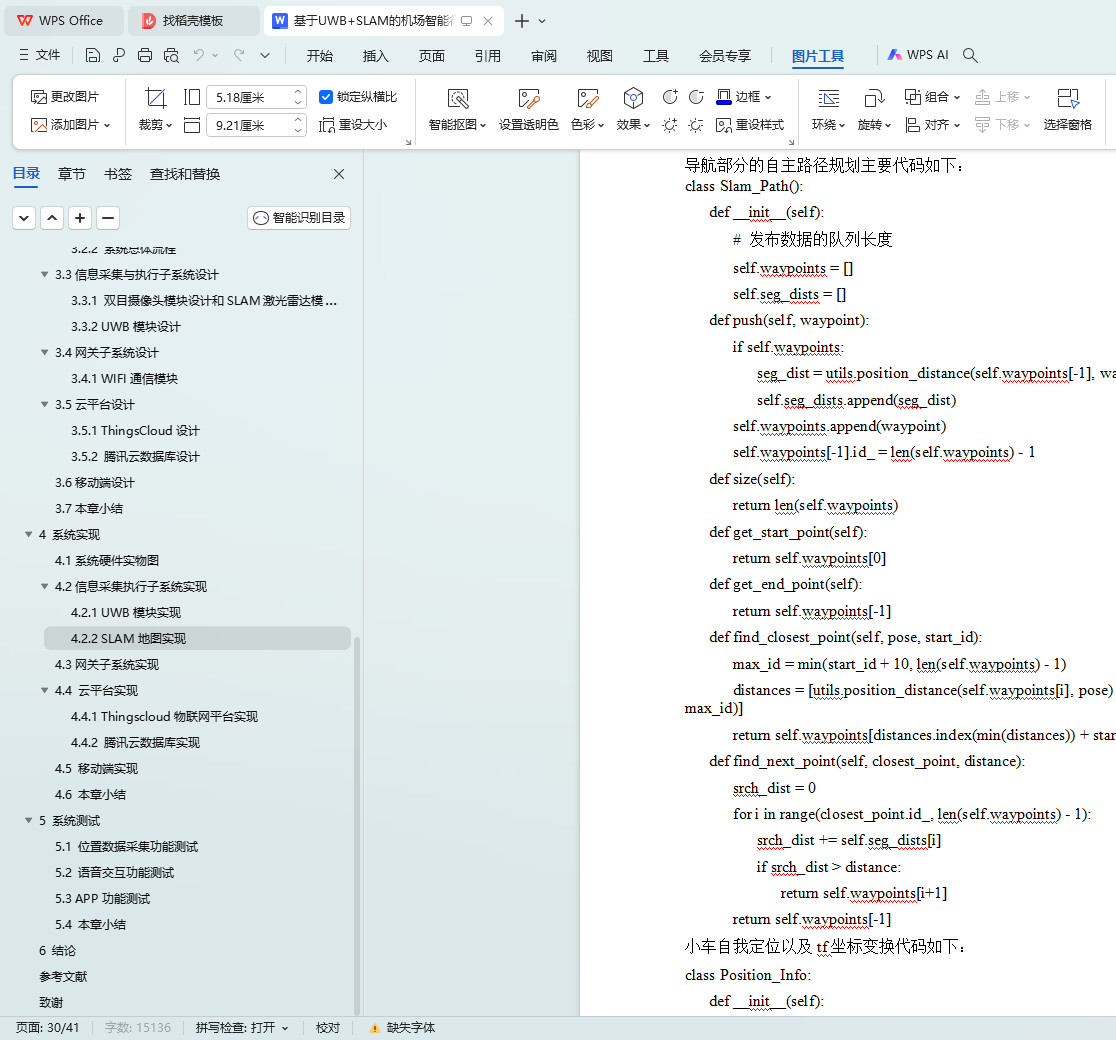
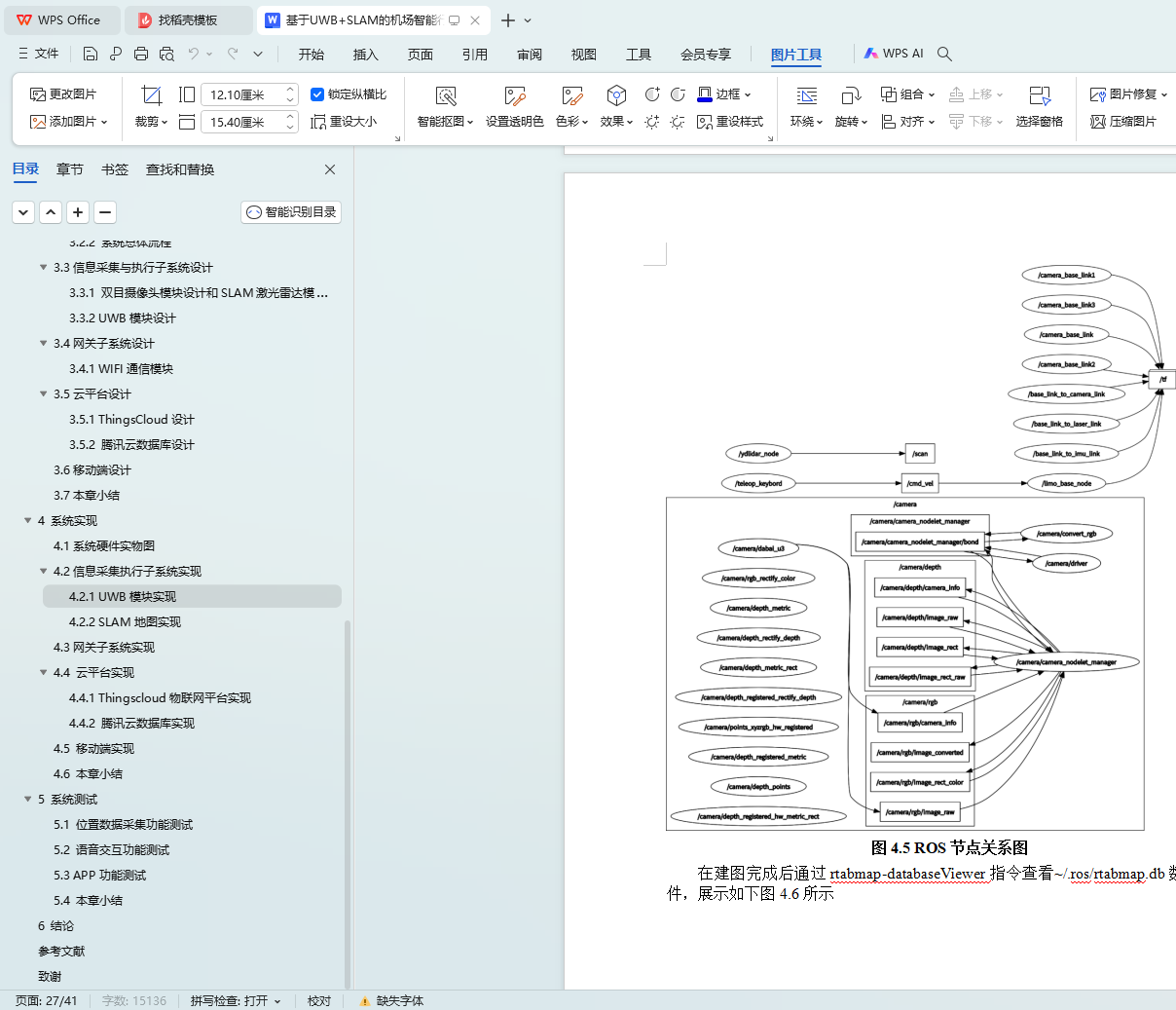
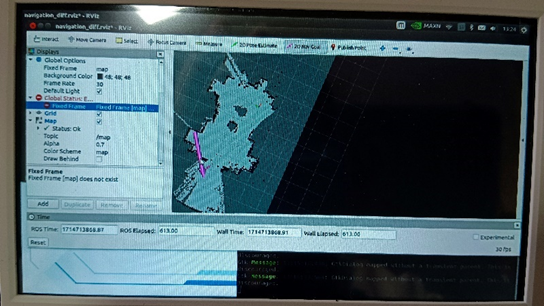
4.2.2 SLAM地图实现
4.3网关子系统实现
4.4 云平台实现
4.4.1 Thingscloud物联网平台实现
4.4.2 腾讯云数据库实现
4.5 移动端实现
4.6 本章小结
5 系统测试
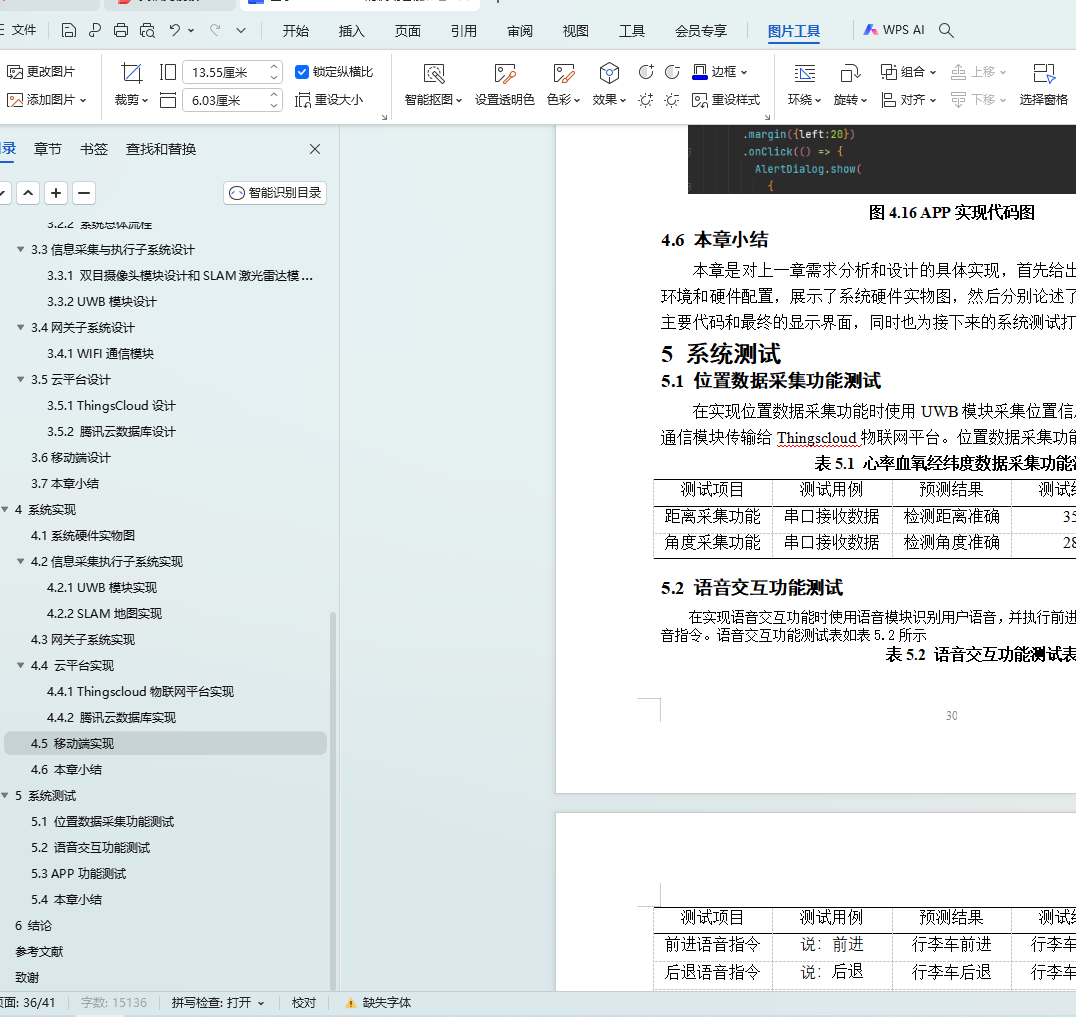
5.1 位置数据采集功能测试
5.2 语音交互功能测试
5.3 APP功能测试
5.4 本章小结
6 结论
参考文献
致谢