����������ҵ���ӳ����ķּ���������
Ŀ¼
����������ҵ���ӳ����ķּ���������
һ��ѡ�ⱳ��������
�����������о���״����չ����
������Ҫ�о�����
�����ּ�������Զ��ּ�ϵͳ���巽�����
�ġ������Ľṹ���
�塢�ּ�����˵������Ľṹ���
�������ֳ����������
�ߡ��豸��ά��ģ
�ˡ��ܽ�
�����
һ��ѡ�ⱳ��������
�ּ��������Ϊ��ҵ�Զ����������Ҫ��֧������������ҵ�������ϰ�����Խ��Խ��Ҫ�Ľ�ɫ���ּ�������ܹ������˹���������ķּ�ץȡ�Ͱ��ˣ��������������Ч�ʣ����������˹��ɱ���Ȼ�������еķּ����������������Ӧ������ҵ���Ӷ��ij�������ṹ�����ܵȷ����Դ������㡣
��������о������й������г�ǰ����Ӧ�ÿռ䡣������������IJ��Ϸ�չ���ּ�����˵�Ӧ���������ؿ����г�����Ҳ��������������ˣ���������о����������ڽ����ǰ������ҵ���ٵ����⣬����Ϊδ���Ļ�������ƺ�Ӧ���ṩ����IJο��ͽ����
�����������о���״����չ����
�����������ڶ��ڷּ�����˼������о���Ӧ��ȡ���������Ľ�չ���ر�����������ҵ���ּ�����˵������Ӧ������Ϊ�о��ȵ㡣���ڵ��о��Ŷ���Ҫ��ע�ڷּ�����˵Ľṹ�Ż����˶����ơ����ܸ�֪�ȷ��档�ڻ�е����Ʒ��棬����ѧ��������������е�۵�����ԡ����Ⱥ�������������Ӧ������ҵ���Ӷ��ij�����
���֮�£������ڷּ�����˼������о���Ӧ�÷����Ϊ��������ȡ�ŷ���ȷ��������������ҵ����㷺Ӧ�÷ּ�����ˣ�ʵ���˸߶��Զ��������ܻ���������������о��ŶӲ�����ע�ڷּ�����˵Ľṹ�Ż��������������������ڿ����������ܡ���Ч���㷨�Ϳ��Ʋ��ԡ����磬һЩ�о�����ͨ�����ѧϰ���˹����ܼ��������ּ�����˵ĸ�֪�;���������ʹ���ܹ����õ���Ӧ���Ӷ�������������
�������ڷּ�����˼������о���Ӧ�÷����ȡ����һ���ijɹ��������д���һ�����������ơ�δ�������ż����IJ��Ͻ�����Ӧ�ó����IJ�����չ���ּ�����˽���������ҵ�з��Ӹ�����Ҫ�����á�
������Ҫ�о�����
����ּ�����һ������������ҵ���ӳ����ķּ�����ˣ��ص��о����е�۵�����ṹ���ּ�����˻�е�۾߱����г̡���ǿ�����ԣ��ܹ�ʵ�����������ϵ��ƶ��������ñ���SMC��צ�������ץȡ��ּ�������Թ����е���ת����ͨ�����������ת����ʵ���趨�Ƕȵ���ת����������SolidWorks������ɻ�е�۵Ľṹ�������ά��ģ�����������װ������壬��ת��Ϊ��άͼֽ��������ϸ��������Ҫ�ṹ����ʽ��������ʽ��ơ����ѡȡ�����ϼ���У�˵����ݡ����⣬�Ի�е�۵��˶���������������봫����ʽ��ȷ�������������о���������˹ؼ���λ�Ĺ���ͼֽ������Ʋ��������˷ּ�����˵Ĺ���Ч�����ȶ��ԣ�ҲΪδ�����ӳ����µ��Զ����ּ��ṩ�˼����ο���
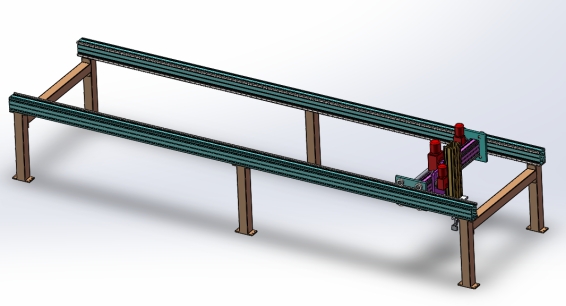
�����ּ�������Զ��ּ�ϵͳ���巽�����
ͼ ���巽��ͼ
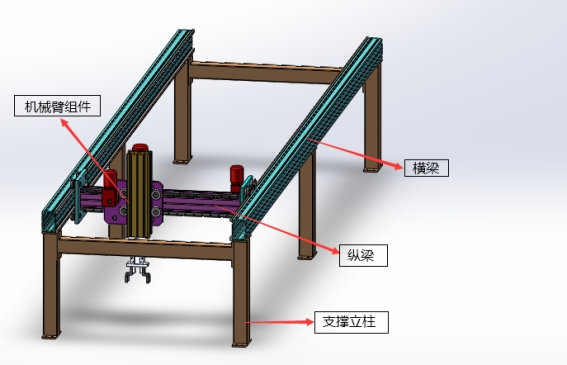
Ϊ�˹���һ��Ч���ȶ��ķּ�ϵͳ�����������һ��߱���ά���ƶ������ķּ�����ˡ����������ܹ���X�ᡢY���Z������������ʵ�־�ȷ�������ƶ����Ӷ�ʵ�ֶԲ�ͬλ���ܼ��ľ�ץȡ��ּ�
�ġ������Ľṹ���
�ּ�����˵����幹��������������ȶ����Ĺؼ����ء�������һ�����У���������ռ���ž������صĵ�λ����Ϊ֧������������ϵͳ�ĺ��IJ�������������Ҫ�������Ը������������������ڻ���������ʱӦ�Կ��ܳ��ֵ�����ˣ��������Ľṹ��ƣ����ǽ����������ϸ�µ��о���
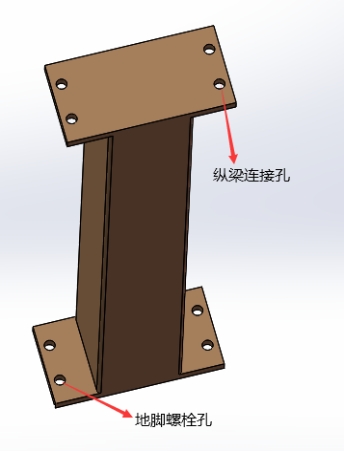
ͼ3.1�����ṹ
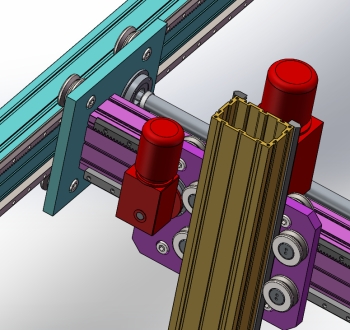
�塢�ּ�����˵������Ľṹ���
����������Ϊ�ּ�����˵Ĺؼ���ɲ��֣�ͬ�������˹�ҵ���Ͳ���Ϊ����ṹ�����ֲ��ϲ����������ʵ��ص㣬���߱���ɫ��ǿ�Ⱥ��ȶ��ԣ��ܹ�����������Ƶ���ƶ������е�ʹ��Ҫ��
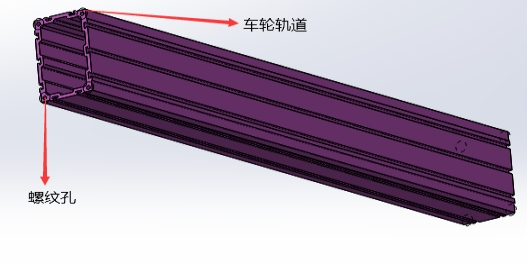
ͼ3.4�����Ľṹ���ͼ
�������ֳ����������
����ģ��m=2mm,����Z=24�����ֽṹ���ͼ��ͼ3��ʾ��
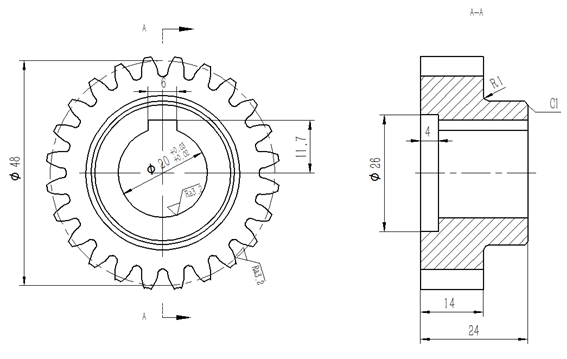
ͼ���ֶ�άͼ
�ߡ��豸��ά��ģ
SolidWorks��Ϊһ������ά�������Ӧ�ù㷺�ұ���������������ƾ���������㡢����ǿ����ص㣬���ܻ�е����ߵ�ϲ�������ṩ�˷ḻ�Ĺ���ģ�飬���ӽ�ģ�顢����ģ���Լ���ģģ��ȣ���Щģ��Ϊ���ʦ���ṩ�˴Ӳ�ͼ���Ƶ�ģ�������������������
ͼ4.1 �ƶ�����
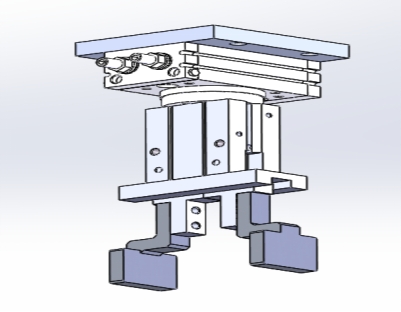
ͼ4.2 ץ��ģ��
ͼ4.3 �豸��װ����ά��ģ
�ˡ��ܽ�
ͨ��������������ҵ���ӳ����ķּ�����˵�����о������dzɹ����������ؼ����ֵ���ƺ�У�˹���������ƹ����У���������̽���˺��߲��֡�������С�֡���������Լ��������������������ӵȹؼ���������ϸ�ڣ�������SolidWorks���������˾�ȷ����ά��ģ��У�ˡ�
�����
[1] ������,�����,�ŕ�.���ڻ����Ӿ��Ĺ�ҵ�����˷ּ�ϵͳ���[J].������ƹ���, 2023, 31(8):138-142.
[2] ����Ȩ.���ڻ����Ӿ��Ĺ�ҵ���������ּܷ�ϵͳ�����ʵ��[J].��������, 2023, 31(16):107-110.
[3] ��־Զ,��ܽ��,��ҫ��,��.���ڹ�ҵ�����˵����Ϸּ�ϵͳ���[J].���繤�̼���, 2023(12):77-79.
[4] ��Ӹ�.����ABB�����˵İ��˷ּ��ѧʵ��̨�Ŀ��������[J]. 2023.DOI:10.16667/j.issn.2095-1302.2022.12.040.
[5] Ф��.����RFID�����Ĺ�ҵ�����˷ּ�ʵѵװ�����[J].�人ְҵ����ѧԺѧ��, 2023, 22(1):117-120.
[6] ����,����.�����Ӿ������Ĺ�ҵ���������ּܷ����������[J].�ɶ�����ְҵ����ѧԺѧ��, 2022, 38(3):4.
[7] �ܳ���,����,Ѧ��Ԫ,��.��ҵ�������Ӿ��ּ�ϵͳӦ�����[J].�Ƽ�������Ӧ��, 2023, 13(23):46-49.
[8] ������������������ǿ���������.ȫ������������ץȡ�����˵������ʵ��[J].�������г�, 2022, 29(9):1-4.
[9] �ս�,Ľ��ǿ,���ƽ�,��.����NX MCD�Ĺ�ҵ�������Ӿ��ּ���������ϵͳ���[J].������Һѹ, 2023(23):73-79.
[10] ����,����.��ҵ�������Զ��ּ���վ���[J].��е�������Զ���, 2022(005):000.
[11] ������,��ѩ��.���ڻ����Ӿ��Ĺ�ҵ�������Զ��ּ�ϵͳ���[J].�Զ���Ӧ��, 2022(001):000.
[12] ������.���ڻ����Ӿ��Ĺ�ҵ�����˵������ּ�ϵͳ���о������[J].��������, 2023, 31(18):35-38.
[13] �����,�����,���ײ�,��.����wMPS�Ĺ�ҵ�����˶�λ�����Զ���������[J].�Զ����������DZ�, 2022(004):000.
[14] ���·�,������,����,��.�Ӿ������Ļ��������̷ּ�ϵͳ�����ʵ��[J].��װ����, 2022, 43(7):6.
[15] ���,������,����.���ѧϰ�ij�������ּ������Ŀ��ʶ��[J].��е���������, 2023(7):271-276.
[16] �Ƴ���,ë����.�����Ϲ�ҵ�����˽ṹ��Ƽ������о�[J]. 2022(3).
[17] Keramidas G , Antonopoulos C P , Voros N ,et al.CPSoSaware: Cross-Layer Cognitive Optimization Tools & Methods for the Lifecycle Support of Dependable CPSoS[J].IEEE, 2020.DOI:10.1109/ISVLSI49217.2020.00-12.
[18] Jiang Y , Wang T , Shao S ,et al.3D SLAM based on NDT matching and ground constraints for ground robots in complex environments[J].Industrial Robot, 2023.DOI:10.1108/IR-05-2022-0128.
[19] Liu Z , Tang H , Lin Y ,et al.Algorithm-System-Hardware Co-Design for Efficient 3D Deep Learning[J].World Scientific Annual Review of Artificial Intelligence, 2023, 01.DOI:10.1142/S2811032323400039.
