摘 要
随着高层住宅火灾救援效率与安全性提升的迫切需求,以及无人机技术在消防领域应用的不断探索。本设计旨在通过创新无人机结构与控制电路,实现高效、安全的高层火灾救援,为现代城市消防安全提供有力支持。
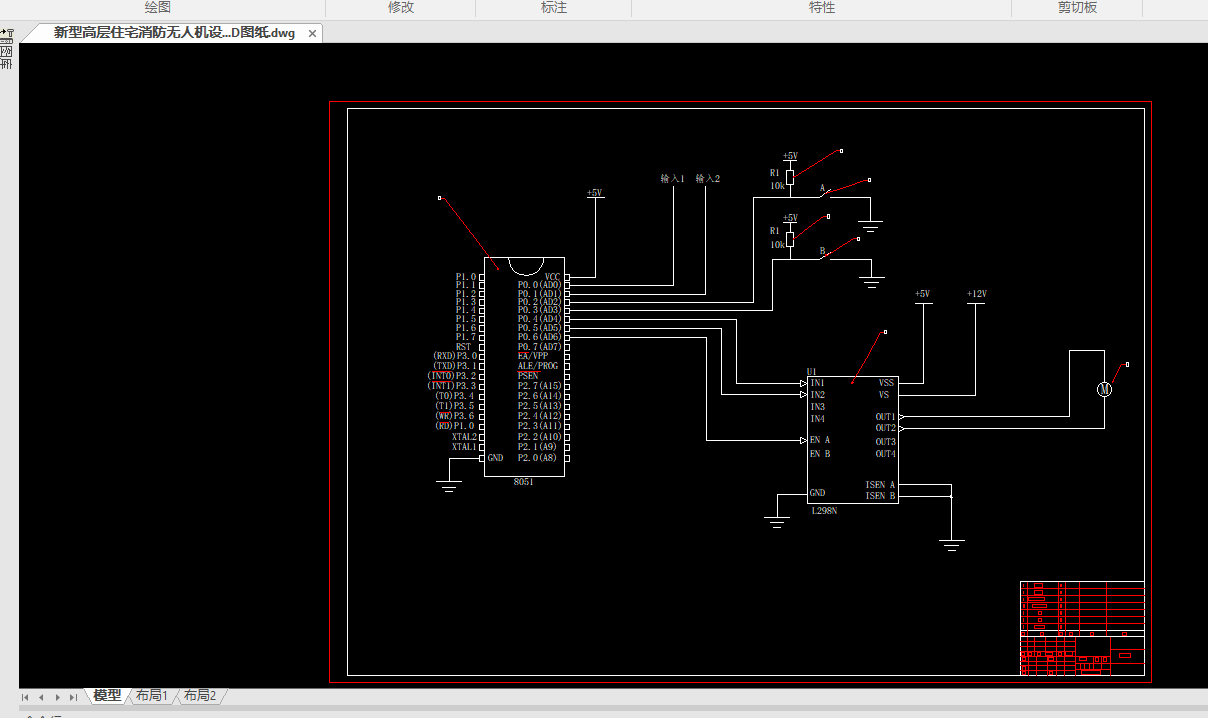
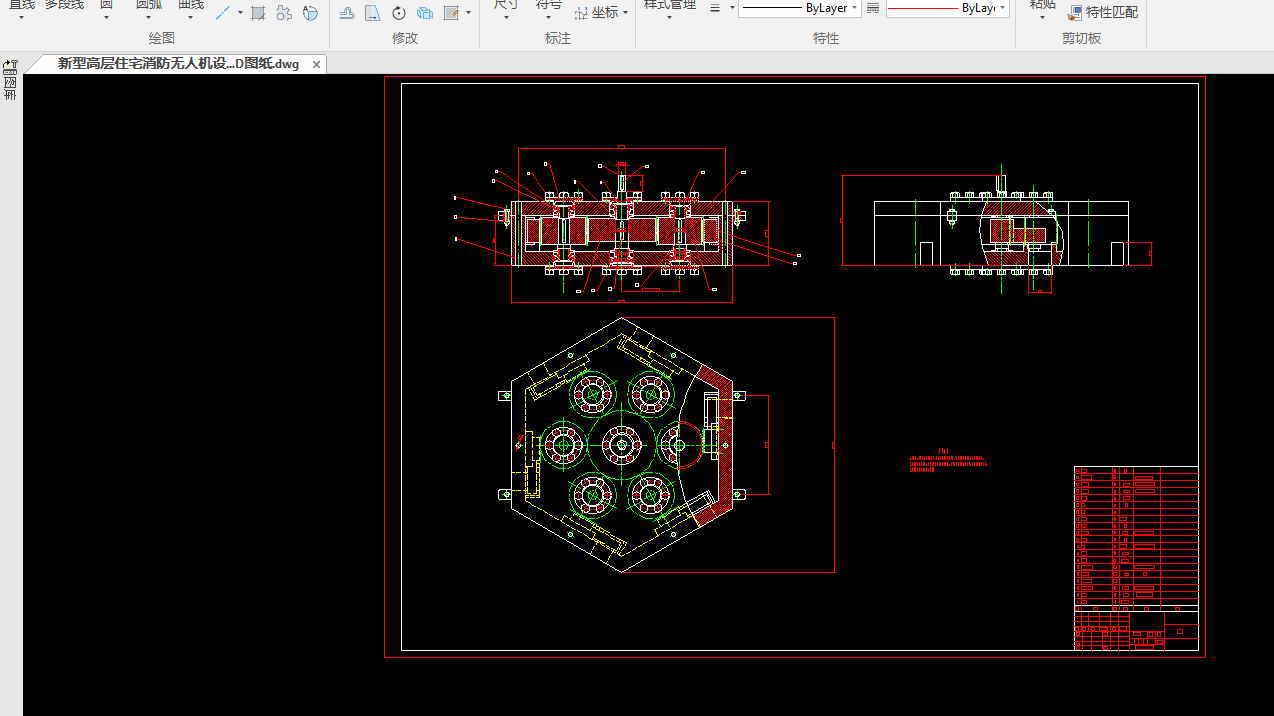
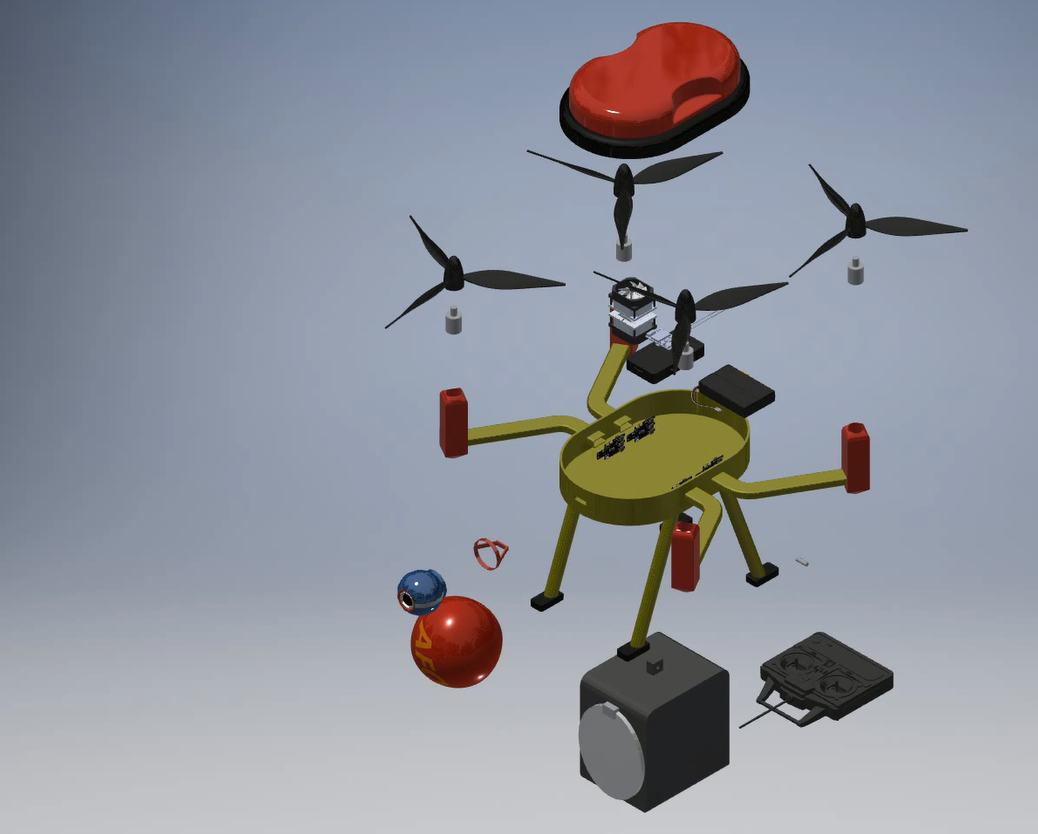
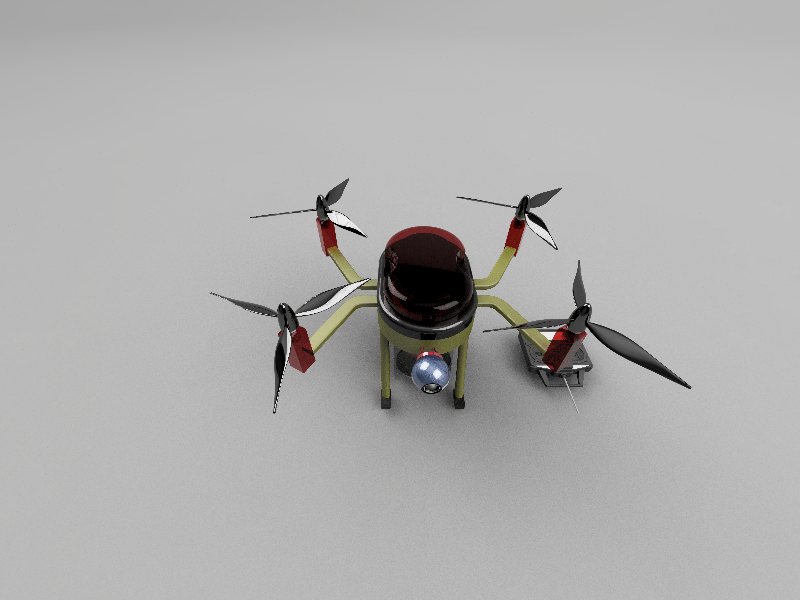
本文旨在设计一款新型高层住宅消防无人机,该无人机具备结构简单、操作便捷以及高可靠性的特点,特别适用于高层火灾救援场景。无人机设计重点在于其水包挂载机构,该机构由挂钩、锁紧与解锁装置及其传动机件组成,可悬挂60kg的消防水包。无人机在挂入水包后,通过遥控装置发出信号,锁紧装置将自动锁紧水包,确保飞行过程中的安全性。当无人机抵达指定火灾地点时,遥控装置再次发出解锁信号,锁紧机构随即解锁,消防水包在重力的作用下自动下落,实现对中小型火灾的有效控制。本文详细阐述了无人机的机械结构设计,绘制了设备装配图,并对2-3个关键部件进行了强度与刚度的校核,确保无人机在救援任务中的稳定性和安全性。此外,本文还设计了无人机的驱动系统控制电路,为无人机的稳定运行提供了技术保障。本设计不仅提高了高层火灾救援的效率和安全性,也为无人机在消防领域的应用提供了新的思路和方法。
关键词:消防无人机;水包挂载机构;机械结构设计;强度与刚度校核;驱动系统控制电路;高层火灾救援
Abstract
With the urgent need to improve the efficiency and safety of high-rise residential fire rescue, as well as the continuous exploration of the application of uav technology in the field of fire protection. This design aims to achieve efficient and safe high-rise fire rescue by the innovative UAV structure and control circuit, and provide strong support for modern urban fire safety.
This paper aims to design a new type of high-rise residential fire-fighting UAV, which has the characteristics of simple structure, convenient operation and high reliability, and is especially suitable for high-rise fire rescue scenarios. The design of the UAV focuses on its water pack mounting mechanism, which consists of a hook, locking and unlocking device and its transmission parts, and can hang a 60kg fire water pack. After the uav hangs into the water bag, it will send a signal through the remote control device, and the locking device will automatically lock the water bag to ensure the safety during the flight. When the UAV arrives at the designated fire site, the remote control device sends out the unlock signal again, and the locking mechanism is unlocked immediately. The fire water bag automatically falls under the action of gravity, realizing the effective control of small and medium-sized fires. This paper details the mechanical structure design of the UAV, draws the equipment assembly map, and checks the strength and stiffness of 2-3 key components to ensure the stability and safety of the UAV in rescue missions. In addition, this paper also designs the driving system control circuit of the UAV, which provides the technical support for the stable operation of the UAV. This design not only improves the efficiency and safety of high-level fire rescue, but also provides new ideas and methods for the application of UAV in the field of fire protection.
Key words: fire fighting UAV; water bag mounting mechanism; mechanical structure design; strength and stiffness check; drive system control circuit; high-level fire rescue