毕业论文(设计)开题报告
|
学 院
|
|
指导老师
|
|
职 称
|
|
|
专业班级
|
|
学生姓名
|
吴钢
|
学 号
|
|
|
题 目
|
基于 STM32 单片机的手势识别系统的设计
|
|
一、研究目的和意义
目的;基于 STM32 单片机、数字图像处理等知识,随着生物识别技术的认识和发展。实现一种基于手势特征的认证技术,与传统的密码识别、指纹识别等身份验证手段在更多优势。从而达到在手势识别智能门禁、手势识别智能支付等领域发挥重大作用。在全球疫情席卷的当下,手势识别可以通过无任何接触的方式完成身份识别认证。
意义:随着经济的发展,人们对精神生活的追求越来越强烈,市场虽然出现一批自动旋转和间歇性的旋转餐桌,但旋转速度和暂停的时间不够智能化,经常要手工干预,不能满足用餐者对智能化的需求,也不能带给用餐者高品质的生活体验因手势是一种自然直观的人机交瓦工具,人们对着摄像头做出适当的动作就可以传递复杂的手势信息,整个过程只需要借助无线摄像头就可以快速完成语义表达,这种人机交互模式为人们提供了高效便捷的操作计算机的方式,非常适合用餐者同餐桌进行互动。
人机交互按照手势可分为静态手势和动态手势,静态手势主要关注手势的形状、轮廓、重心等因素,动态手势记录手的运动轨迹、手的挥动方位等要点。相应的手势识别技术也分为静态识别技术和动态识别技术,静态手势主要指人体手势的方向、手势的外形和纹理,动态手势识别主要是跟踪和识别手势的运动过程和轨迹。手势又可按照识别目的细分为操作型手势和通信型手势,前者指人们的具体操作行为,在设计领域中涉及虚拟现实技术和增强现实技术,而后者指手势是一种最自然的交互手段,利用它本能的反映完成与设备之间的交互通信。手势识别技术也是一门新兴技术发展产物,图像处理、人工智能、神经识别、智能分析、场景模拟都与之密切相关,涉及计算机视觉、工业制造、肢体识别、图像处理、计算机语言等多门学科,它的发展某种因素上影响着相关学科的发展。
手势识别技术在虚拟现实领域目前应用广泛,虚拟现实可应用在生产环境中,也
可应用在数字生活和娱乐中,随着手势识别的不断发展,手势识别技术不久将在其他
|
 领域实现更多的突破,随着 3D 传感器技术的发展和应用,手势识别技术也有原来一直采用的 2D 视觉术开始 3D 视觉术发展,并且以后应用领域更广。
领域实现更多的突破,随着 3D 传感器技术的发展和应用,手势识别技术也有原来一直采用的 2D 视觉术开始 3D 视觉术发展,并且以后应用领域更广。
手势识别相对于其他输入设备而言都要简单,只要求使用者通过手势完成简单的动作就可以表达丰富的含义,且安装简单,一般只需要单一的摄像头和少量的元器件就可以完成图像的处理和信息的反馈。手势识别技术在日常生活中得到了广泛的应用。
二、国内外研究现状
国内对于手势识别的研究主要集中与国内高校及研究院。哈尔滨工业大学的吴江琴、高文(2001)等给出了 ANN 与 HMM 的混合方法作为手语的训练识别方法,用来增加识别方法的分类特征和减少模型的估计参数的个数。将 ANN-HMM 混合方法用于与有 18 个传感器的数据手套的中国手语识别系统中,孤立词语识别率为 90%,简单的语句识别率为 92%。天津大学通过研究汉语语音识别系统并成功用来控制机器人。在此基础上,天津大学研究人员根据操作者的体态动作图像信息控制机器人的状态。清华大学研究人员通过选择识别率较高的手势类型作为人机交互的信号,并应用于电脑游戏中。
手势识别的研究起步于 20 世纪末,由于计算机技术的发展,特别是近年来虚拟现实技术的发展,手势识别的研究也到达一个新的高度。韩国的李金石,李振恩等采用熵分析法从背景复杂的视频数据中分割出人的手势形状,然后计算手型的质心到轮廓边界的距离。该识别系统具有较好的识别率。通过对 6 个实验样本的测试,结果显示其正确识别率近乎全部。印度人米娜克氏在基于视觉手势识别的基础上进一步研究, 提出一种基于结构特征的手势识别算法。该算法包括去除背景、方向检测。手指检测以及手指的数量进行检测,最终确定手势。于成龙等采用基于视觉的组合特征进行手势识别,通过手掌的大小、长度、质心、长宽比等人手的属性值结合使用,使得识别率得到极大提升。对于手势识别的研究不仅仅仅限于大学或者是研究院等机构,众多的大型公司机构也纷纷加入到手势识别研究以及应用的行列。2014 年 4 月 30 日,据国外媒体报道,微软研发部门近日在多伦多举行的“计算机人机互动大会”上,展示了 一 款 运 动 传 感 键 盘 , 该 键 盘 可 以 对 用 户 悬 空 手 势 进 行 识 别 。 微 软 的Type-Hover-Swipe 键盘,集成了 64 个传感器,并隐藏在键盘的格子中间。用户只需将手悬停在键盘上方,就可以以一种比较舒服的姿势进行手势操作。可以实现前一秒打字,下一秒进行手势操作。
 三、研究内容和方法
三、研究内容和方法
(一)研究内容
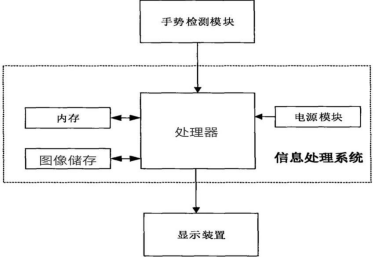
本课题研究基于 STM32 单片机的手势识别系统设计,包括:手势检测、手势跟踪、手势对比、图像存储、图像显示、需求分析、系统总体方案设计、硬件设计、软件设计、软硬件联合调试和仿真等,其中手势识别系统的基本架构由两部分组成,分别为数据采集和特征提取、分类器设计。数据采集通常会利用传感器获取人体运动的数据, 特征提取是指从原始数据中提取区分不同手势的信息,从而完成手势分类任务。而系统框图大致如下:
手势识别传感器常见的技术实现有摄像头、红外线传感器、超声波传感器、雷达传感器等,本次设计采用的是摄像头实现技术,其原理是:它可以捕捉到用户的手势动作,并将其转化为数字图像。然后,通过图像处理,可以识别出手势的类型。例如, 通过检测手指的位置和运动轨迹,可以实现手势的识别。
(二)研究方法
(1)手势检测:检测图片中是否存在手势,解决因手势所在的位置不同、尺寸不同、存在遮挡、手势不同、视角不同等问题;
(2)手势跟踪:通过对视频流中的每一帧图像进行抽取分析,并实时检测和识别;
(3)手势对比:通过检测到的手势与图像库中的进行搜索和对比。首先将待检测手势的特征进行提取,随后根数特征数据到数据库中进行搜索。选择出根据特征匹配度进行完成手势识别;
(4)图像存储:把检测到的图像根据需要进行存储设置,以便后期分析; (5)移植到 STM32:将手势识别系统移植 STM32 单片机上并实现其功能;
 (6)图像显示:手势匹配成功与否在 LED 液晶屏幕上进行显示;
(6)图像显示:手势匹配成功与否在 LED 液晶屏幕上进行显示;
(7)设计系统各模块的硬件设计方案; (8)给出程序各模块的设计方案及调试实现。
四、进度安排
(1) 2023 年 11 月 2 日之前下达任务书。
(2) 2023 年 11 月 2 日-2023 年 12 月 2 日撰写开题报告,2023 年 12 月 4 日前提交开题报告。
(3) 2023 年 12 月 5 日-2024 年 1 月 5 日,阅读毕业设计相关资料,研究论文总体方案。
(4) 2024 年 1 月 06 日-2024 年 2 月 15 日,完成毕业设计的基本框架,完成毕业设计的相关试验,完成论文提纲。
(5) 2024 年 2 月 16 日-2024 年 3 月 25 日,完成硬件电路原理图设计,初步完成软件框图及软件设计,进行毕业论文初稿的撰写,充实提纲内容,完成初稿。并于 3 月 15 日前完成中期检查。
(6) 2024 年 3 月 26 日-2024 年 4 月 15 日对手势识别系统进行仿真,并对初稿进行进一步的修改与完善。
(7) 2024 年 4 月 16 日-2024 年 4 月 25 日,完成论文的查重检测,评审,准备演讲稿;完成论文格式审查以及顶装审批,准备毕业论文答辩的资料。
(8)2024 年 4 月 26 日-2024 年 5 月 5 日,完成毕业论文答辩。
 五、参考文献
五、参考文献
[1] 王炳松.基于 FPGA 和 DSP 的 CIS 图像处理系统的研究与实现[D].西南交通大学,微电子学与固体电子学,2013.
[2] Zhang Qiu-yu, Zhang Mo-yi, Hu Jian-qiang. A Method of Hand GestureSegmentation and Tracking with Appearance Based on Probability Model.IITA2008[J],2008:380-384.
[3] Zhang Qiu-yu, Zhang Mo-yi, Hu Jian-qiang. Hand Gesture Contour TrackingBased on Skin Color Probability and State Estimation Model. Journal ofMultimedia[J],2009.
[4] Zhang Qiu-yu,Zhang Mo-yi, Hu Jian-qiang. Polar Radius-Haar WaveletDescriptor for 2D Shape.[J],2009:467-472.
[5] 张秋余,胡建强,张墨逸.一种实时手势跟踪目标中心的线性预测方法.兰州理工大学学报[D],2010 年第 2 期发表
[6] 张秋余,胡建强,张墨逸.基于区域生长的 Mean shift 动态变形手势跟踪算法研究,模式识别与人工智能[D],2010 年发表
[6] 张秋余,胡建强,张墨逸,一种基于联合空间的动态变形手势跟踪算法研究[D], 待发表.
[7]汤志彦,冯析。适用于机器人视觉的手势识别系统[J].计算机工程与应用 2005, 41(16):51-54
[8] 陈一民, 张云华。基于手势识别的机器人人机交互技术研究机器人[J] , 2009,30(4):353-356
[9] 谭永,肖南峰。基于改进的 RC:E 和 RBF 神经网络的静态手势识别 1 计算机工程与应用[D],2011,47(7):172-176.
[10] Dardas N H,Ueorganas N D 实时手势检测和识别,计算机视觉和图像理解[D]。2011,60(11):3592-3607
[11] TakahashiT,Shino F K.手势编码基于实验使用手势交错设备[D]。1991,23(2):67 一 73 [12]LeeJ,KuniiModel。基于分析手的姿势,微机图形及应用[D]。1995,5(5):77-86. [13]任海兵,祝远新,徐光裕,等.复杂背景下的手势分割与识别[D].自动化学报2002,18-121.
|
[14] Francke H,Ruiz-del-SolarJ,Verschae R。实时手势检测和识别使用提高了分类器和主动学习[D]。2007:533-547
[15] 杨波,宋晓娜,冯志全复杂背景下基于空间分布特征的手势识别算法 I1 计算机辅助设计与图形学学报[D],2010,22(10): 1841-1848.
|
|
指导教师意见:
签名: 年 月 日
|
|
教研室意见:
签名: 年 月 日
|
|
学院意见:
签名: 年 月 日
|