摘 要
在当今时代,智能化技术正以前所未有的速度蓬勃发展,其中,网络智能视频监控系统的普及尤为显著。随着视频监控技术逐步由传统的模拟模式向数字化、网络化、智能化的方向迈进,目标检测和跟踪技术作为计算机视觉领域的关键要素,在推动监控系统智能化进程中发挥了不可或缺的作用。这些技术的发展不仅提升了监控系统的效能,也极大地增强了其智能化水平,为现代社会的安全管理带来了革命性的变革。因此,本选题旨在利用STM32与OpenMV等先进技术,设计一个高效、稳定的目标跟踪系统,以满足实际应用中的需求。此外,随着人工智能和机器视觉技术的不断进步,目标跟踪系统在各个领域的应用也越来越广泛,如智能安防、自动驾驶、机器人导航等。因此,本选题也来源于对这些领域技术发展和应用前景的深入研究和探索。
本研究基于STM32与OpenMV设计了目标跟踪系统。通过需求分析,系统需识别被测物体,并控制舵机使OpenMV摄像头对准目标。在系统总体方案设计中,对目标跟踪系统的发展、应用及学术研究现状进行了深入分析,并据此构思了系统的整体架构。在硬件设计方面,利用STM32的GPIO接口与OpenMV摄像头进行连接;在软件设计方面,通过STM32固件通信和OpenMV视觉算法实现对目标物体的跟踪控制。软硬件联合调试与仿真过程中,通过搭建项目开发环境,实现了系统模块的功能展示,并从多个角度验证了系统数据的正确性、功能的完备性以及性能的稳定性。本研究成果为目标跟踪技术的进一步应用提供了理论支持和实践参考。
关键词:STM32;OpenMV;目标跟踪;视觉算法;GPIO接口;软硬件联合调试
Abstract
In today's era, intelligent technology is booming at an unprecedented speed, among which, the popularity of network intelligent video surveillance system is particularly significant. With the video surveillance technology gradually from the traditional simulation mode to the direction of digitalization, networking and intelligence, the target detection and tracking technology, as a key element in the field of computer vision, has played an indispensable role in promoting the process of intelligent monitoring system. The development of these technologies not only improves the efficiency of the monitoring system, but also greatly enhances its intelligence level, which brings revolutionary changes to the safety management of modern society.Therefore, this topic aims to design an efficient and stable target tracking system with advanced technologies such as STM 32 and OpenMV to meet the needs in practical application. In addition, with the continuous progress of artificial intelligence and machine vision technology, the application of target tracking system is becoming more and more widely used in various fields, such as intelligent security, autonomous driving, robot navigation and so on. Therefore, this topic also comes from the in-depth research and exploration of the technological development and application prospects in these fields.
This study designed a target tracking system based on STM 32 and OpenMV. Through demand analysis, the system needs to identify the measured object and control the steering gear to point the OpenMV camera at the target. In the overall scheme design of the system, the development, application and the academic research status of the target tracking system are deeply analyzed, and the overall architecture of the system is conceived accordingly. In terms of hardware design, the GPIO interface of STM 32 is used to connect with OpenMV camera; in software design, STM 32 firmware programming and OpenMV vision algorithm are used. In the process of joint debugging and simulation of hardware and software, by building the project development environment, the function display of the system module is realized, and the correctness of the system data, the completeness of the functions and the stability of the performance are verified from multiple angles. The present results provide theoretical support and practical reference for further application of target tracking technology.
Key words: STM 32; OpenMV; target tracking; visual algorithm; GPIO interface; software and hardware joint debugging
目 录
1 绪论
1.1 选题背景和研究意义
1.1.1 选题背景
1.1.2 研究意义
1.2 国内外研究状况
1.3 研究的主要内容
2 硬件设计
2.1 目标跟踪系统
2.2 系统方案设计
2.3系统硬件设计
2.3 硬件开发平台
2.3.1 系统硬件组成
2.3.2 OpenMV摄像头
2.3.3 云台舵机介绍
2.3.4 系统硬件说明文档
3 软件开发平台系统设计
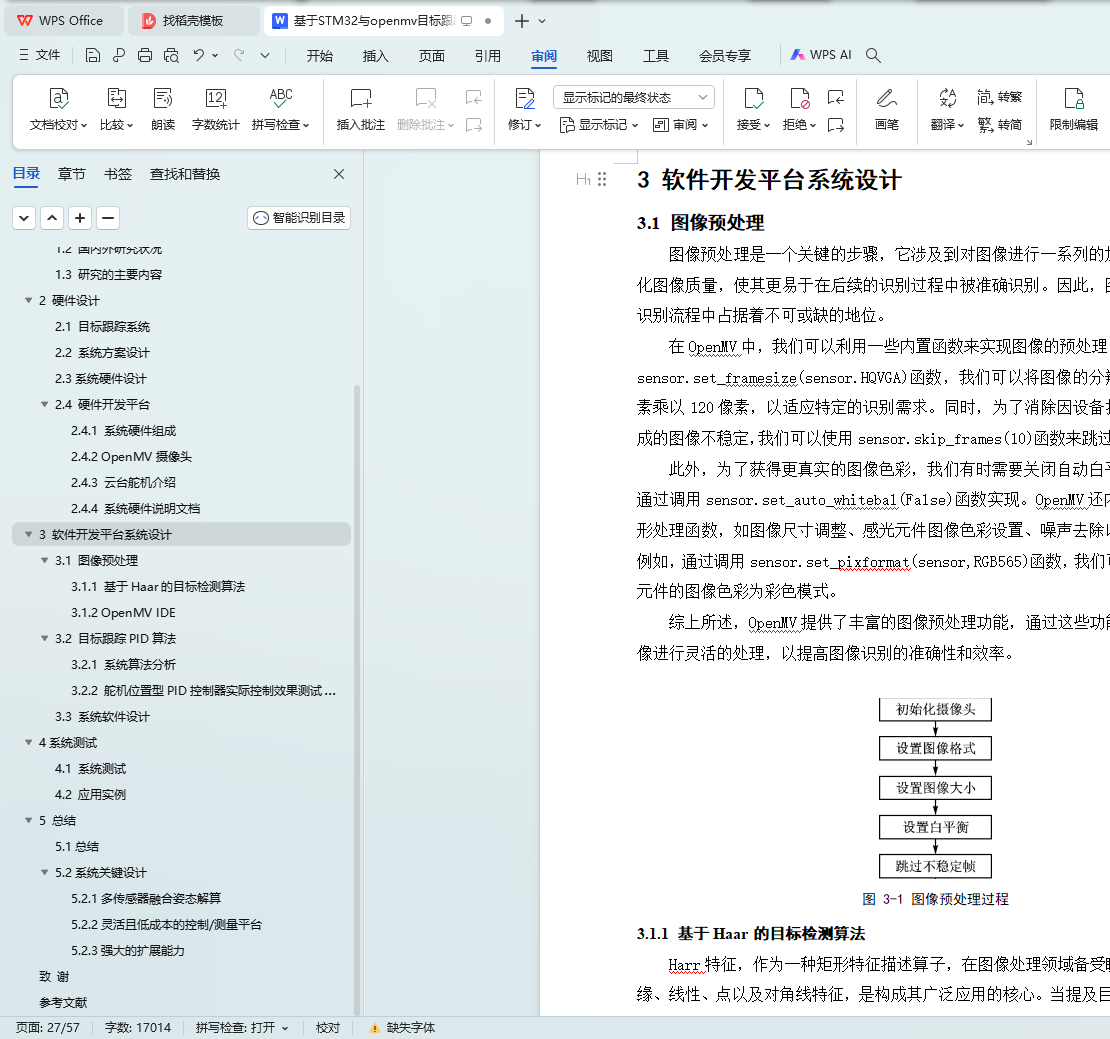
3.1 图像预处理
3.1.1 基于Haar的目标检测算法
3.1.2 OpenMV IDE
3.2 目标跟踪PID算法
3.2.1 系统算法分析
3.2.2 舵机位置型PID控制器实际控制效果测试及分析
3.3 系统软件设计
4系统测试
4.1 系统测试
4.2 应用实例
5 总结与创新
5.1总结
5.2系统关键设计与创新
5.2.1多传感器融合姿态解算
5.2.2灵活且低成本的控制/测量平台
5.2.3强大的扩展能力
致 谢
参考文献