摘 要
AGV小车是一种新型的自动搬智能移动小车,具有灵活可靠、柔性化好、效率高、操作简便、可控性强等许多优点,因此在柔性制造系统和自动化工厂中得到了广泛的应用,极大地提高了企业的生产制造效率和自动化程度。将来的AGV必然向着更为简捷高效的方向发展,会得到进一步推广,其应用领域也必然会随之变的更加广泛。
本文中提出了一种结构巧妙、机动性好、稳定性能高的磁导航潜伏式牵引AGV小车设计方案。深入学习研究 ,总结出AGV的基本结构:车架,载荷传送装置,驱动装置,动力系统等和自动化高的主要特点。分析目前国内外AGV小车的发展形势,得出目前国外的研究趋势以及国内小车生产商的发展情况。目前小车的内容繁多,从移载方式、导引方式、传动轮系和转向方式入手,全方位的比较,确定了合理AGV小车的总体布置方案。通过运送载荷要求,计算选定合适的电机,进行机械结构内容分析和设计,最后完成了小车三维建模以及底盘的有限元分析。最后对小车的控制系统设计以及路径行驶规划策略做出分析设计,简述了各控制板块的基本工作原理,使AGV小车的运行智能化保证了可能性。
关键词:AGV,磁导航,结构设计
ABSTRACT
AGV car is a new type of automatic intelligent mobile car, which has many advantages, such as flexible and reliable, good flexibility, high efficiency, simple operation, strong controllability and so on. Therefore, it has been widely used in flexible manufacturing system and automatic factory, which greatly improves the manufacturing efficiency and automation degree of enterprises. In the future, AGV is bound to develop in a more simple and efficient direction, which will be further promoted, and its application fields will become more extensive.
In this paper, a design scheme of magnetic navigation latent traction AGV vehicle with ingenious structure, good mobility and high stability is proposed. In depth study and research, summed up the basic structure of AGV: frame, load transfer device, driving device, power system and the main features of high automation. The development situation of AGV at home and abroad is analyzed, and the research trend abroad and the development situation of domestic car manufacturers are obtained. At present, the contents of AGV are various. Starting from the transfer mode, guidance mode, transmission gear system and steering mode, the overall layout scheme of AGV is determined by comprehensive comparison. According to the load requirements, the appropriate motor is selected, and the mechanical structure is analyzed and designed. Finally, the three-dimensional modeling of the car and the finite element analysis of the chassis are completed. Finally, the control system design and path planning strategy of AGV are analyzed and designed, and the basic working principle of each control plate is briefly described, which makes the operation of AGV intelligent and ensures the possibility.
Key words: AGV, Magnetic navigation, Structural design
目 录
第1章 绪论
1.1 研究背景和意义
1.2 AGV的基本结构和特点
1.2.1 AGV的基本结构
1.2.2 AGV的特点
1.3国内外发展现状
1.3.1国外发展现状
1.3.2 国内发展现状
第2章 总体方案设计
2.1 移载方式
2.1.1 移载方式分类
2.1.2 移载方式选定
2.2 导引方式
2.2.1 导引方式分类
2.2.2 导引方式选定
2.3 传动轮系
2.3.1 传动轮系分类
2.3.2 传动轮系选定
2.4 转向方式
2.4.1 转向方式分类
2.4.2 转向方式选定
2.5 总体方案的选定
第3章 机械及硬件结构设计
3.1 潜伏式自动导引车的设计概述
3.2 驱动机构的设计
3.2.1 驱动单元参数计算
3.2.2 驱动电机选型
3.3 升降牵引机构的设计
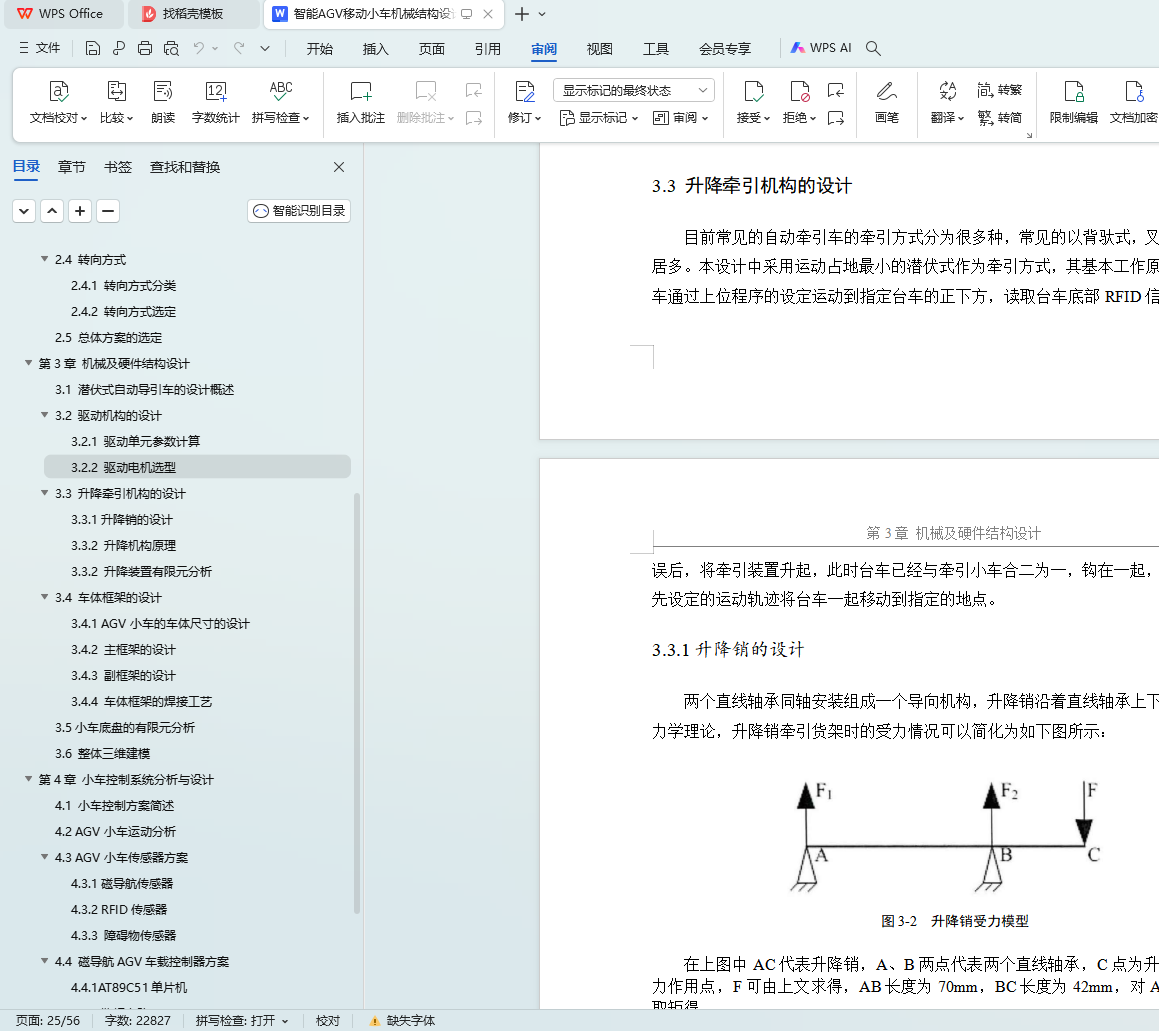
3.3.1升降销的设计
3.3.2 升降机构原理
3.3.2 升降装置有限元分析
3.4 车体框架的设计
3.4.1 AGV小车的车体尺寸的设计
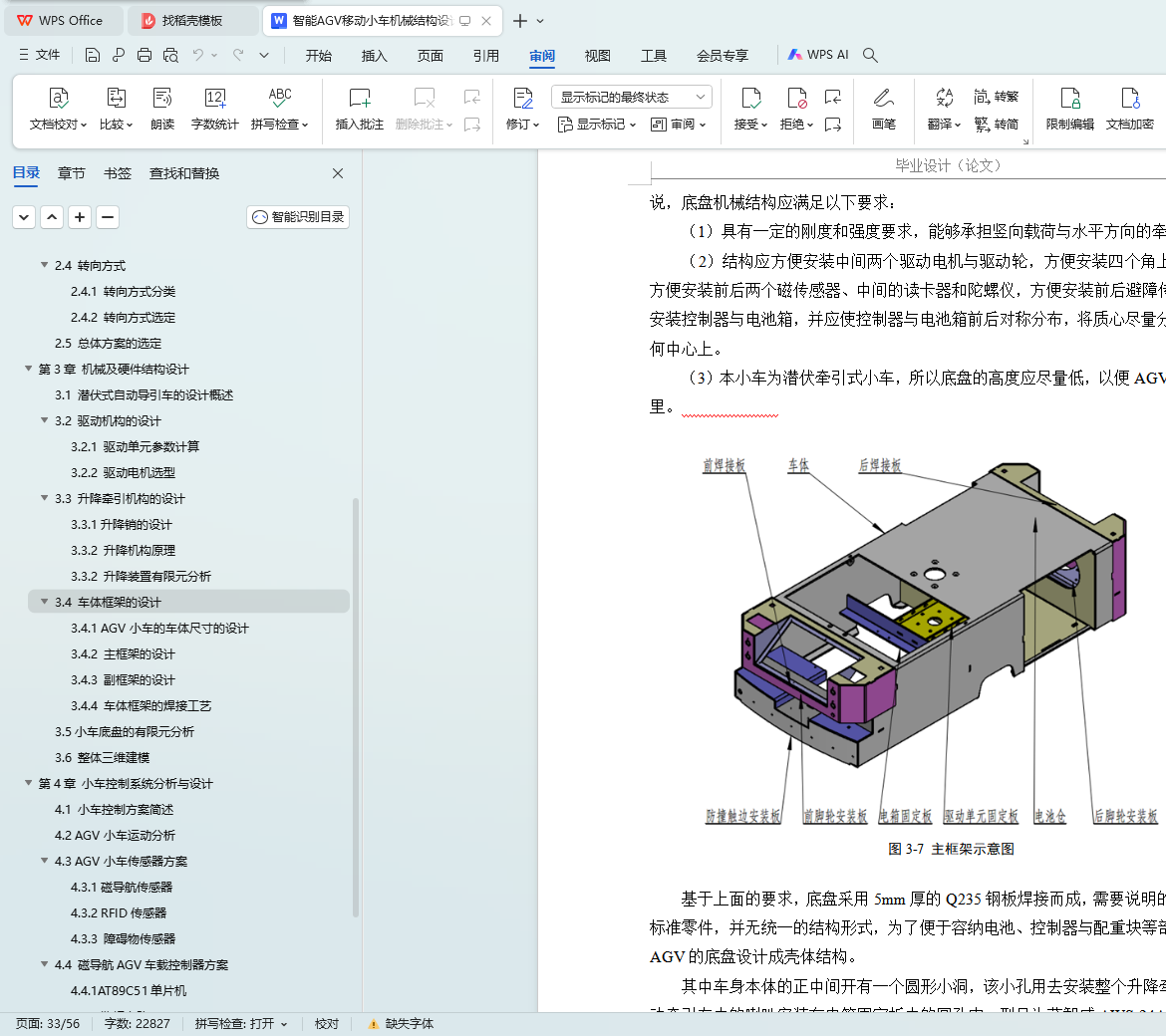
3.4.2 主框架的设计
3.4.3 副框架的设计
3.4.4 车体框架的焊接工艺
3.5小车底盘的有限元分析
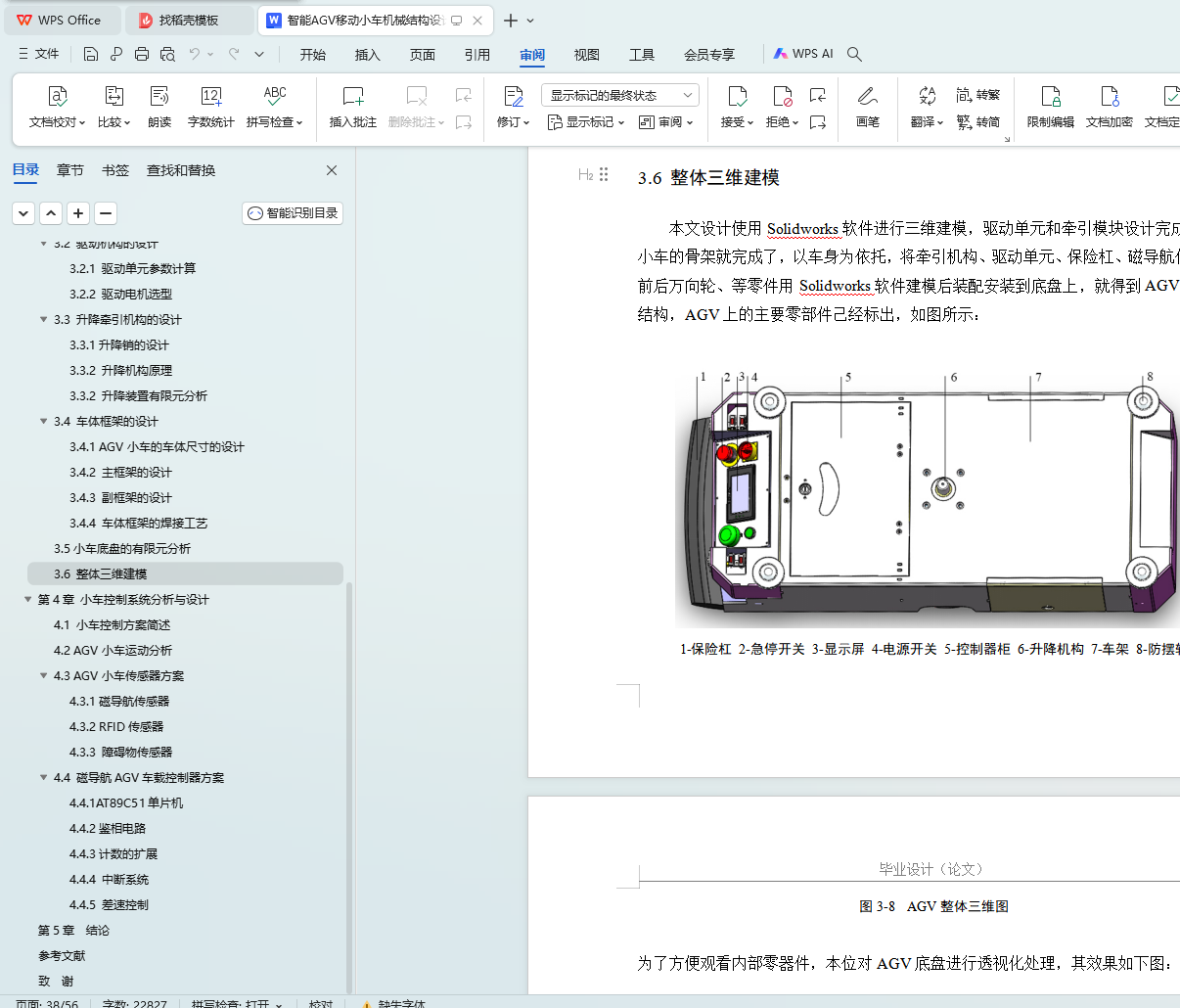
3.6 整体三维建模
第4章 小车控制系统分析与设计
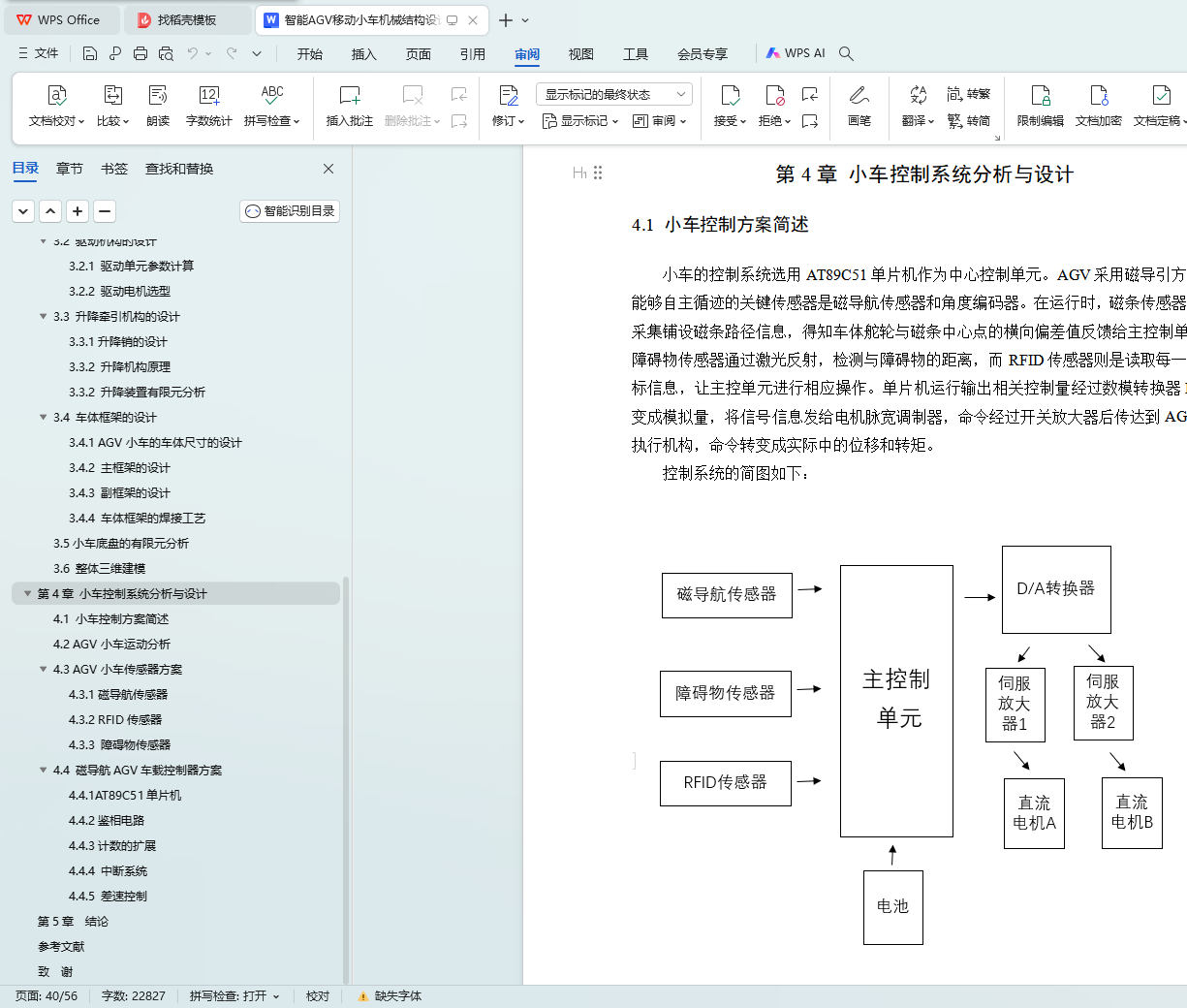
4.1 小车控制方案简述
4.2 AGV小车运动分析
4.3 AGV小车传感器方案
4.3.1磁导航传感器
4.3.2 RFID传感器
4.3.3 障碍物传感器
4.4 磁导航AGV车载控制器方案
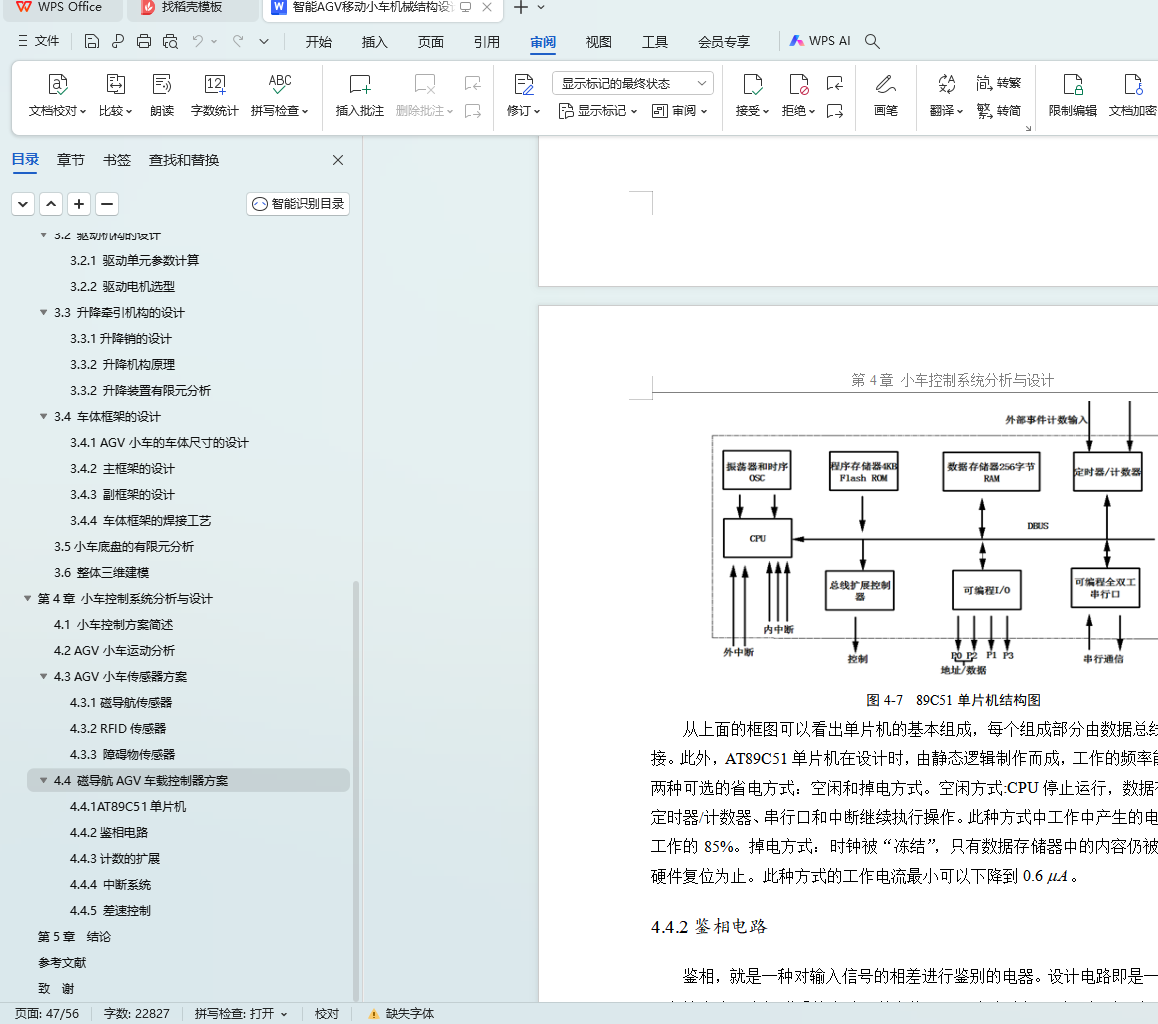
4.4.1AT89C51单片机
4.4.2鉴相电路
4.4.3计数的扩展
4.4.4 中断系统
4.4.5 差速控制
第5章 结论
参考文献
致 谢