柔性冲压生产线搬运机器人设计
摘要
目前,工业机器人已经广泛运用于工厂的生产车间,搬运机器人更是在车间的生产线上随处可见。由于生产车间的人工劳动力越来越缺乏,而生产车间的劳动强度也不断增强,故而越来越多工业机器人被运用到生产中,其中常见的有搬运机器人、弧焊机器人、点焊机器人等。在生产车间中机器人是工业生产中的主要劳动力,工业机器人的运用使得车间生产效率大大提高。我国的工业机器人相比国外强者来说,技术还很缺乏,需要不断的研究改进。近年来我国在工业机器人的理论、技术研究方面取得了傲人的成就,使得我国与国外强者在机器人方面的技术差距不断减小。
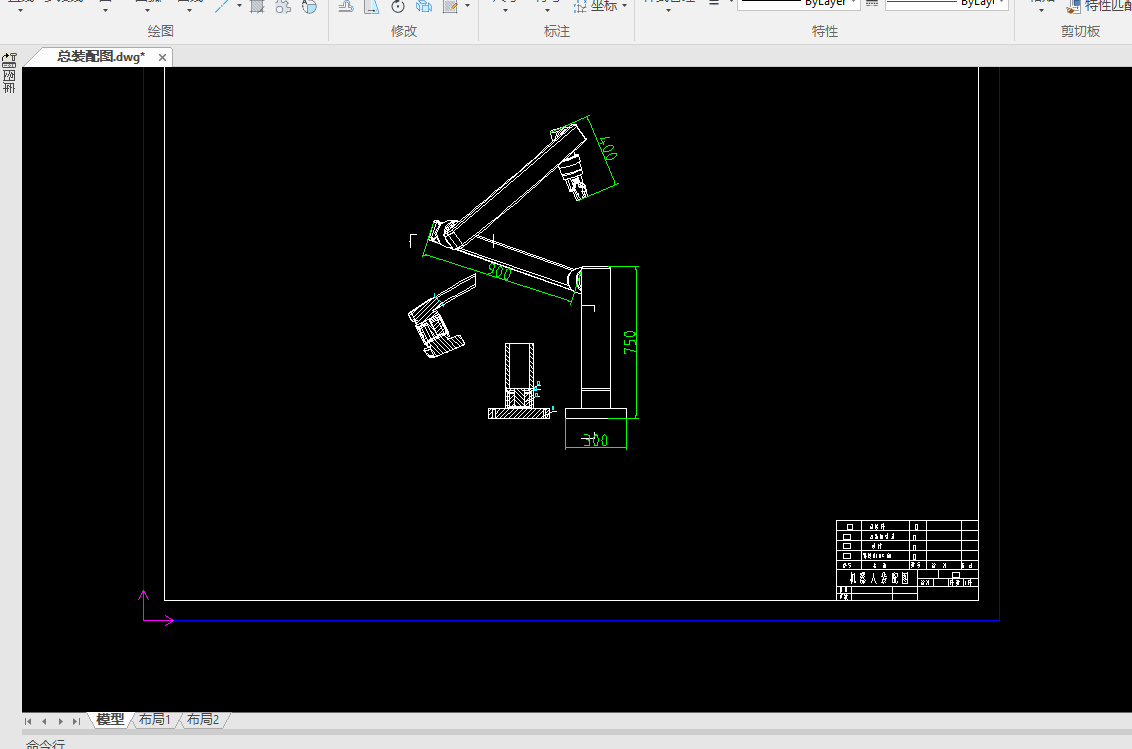
本课题针对工厂的规模限制以及工厂中冲压机床的数量不足的现象,设计了一种搬运机器人组成柔性生产冲压线,以便将多道工序在同一机床加工。其主要任务是将指定位置的汽车冲压模具,搬运到冲压机床工作台上,在冲压完成后将工件搬运到另一处指定地点。
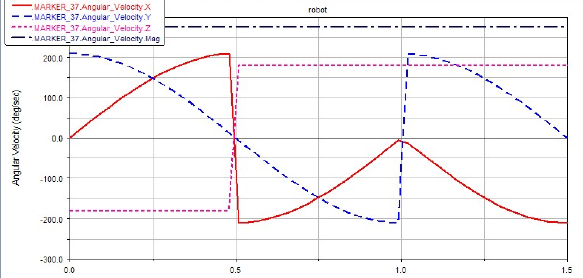
首先,针对柔性冲压生产线的实际情况对机器人进行结构设计、材料的选择及其强度、刚度验证,包括机器人应具有的合理自由度的确定、各个关节尺寸设计,及各个运动关节的结构设计。其次,对机器人关节所需动力源的计算选择,并给出相关技术参数。本文所选择的提供机器人运动的动力元件为液压缸。进行液压缸活塞驱动力计算,及其材料的强度、刚度验证。然后,给出机器人运动控制的初步方案。最后,根据已经设计好的尺寸运用绘图软件建模。将所设计机器人模型导入ADAMS中,通过运动关系副的添加进行运动分析,得到其角速度以及角加速度的运动曲线图,以验证其合理性。
关键词 :工业机器人 结构设计 液压缸 控制系统
The design of handling robot about flexible punch line
Abstract:At present, industrial robot have been widely used in industrial machinery production workshop, the use of robot is more common. Due to the lack of labor is more and more common in production workshop, and the labor intensity is also growing., More and more industrial robots have been applied to production, which mainly are handling robot, welding robot, welding robot etc. Robot is the key equipment in the industrial .With the help of robot, the efficiency is improved. Compared with foreign robot, our robot in technology is behind them, so we have to do more and more research about this. However, recent years we have made great progress in technology, materials and design. We are on the way to catch up with eastern countries.
The design is for solving the problem which are the lack of punching machine and limit size, so I have designed a flexible stamping production line composed by a robot, its main function is multiplying several process on a same machine tool. . Its main task is to specify the location of the car stamping die, moving to the stamping machine tool workbench, after the stamping is completed then, moved to another designated location.
Firstly, choose the materials which is able to satisfy the stiffness and the strength in the actual situation. Also, I have design the structure of the machine. Next, do the job which is verifying the freedom and structure Secondly, the calculation and selection of the power source for the robot joints is given, and the relevant technical parameters are given. The power element of the robot motion is hydraulic cylinder. Hydraulic cylinder piston driving force, and its material strength, stiffness verification. Then, the preliminary scheme of robot motion control is given. Finally, according to the size of the design do the graphics software. Model the robot I have designed into ADAMS. Through the kinematic analysis, the angular velocity and angular acceleration of the motion curve are obtained, and the rationality of the motion curve is verified.
Key words: Industrial robot,Structure design,Hydraulic cylinder,Control system
目录
第1章 绪论
1.1设计背景及来源
1.2国内外工业机器人的发展现状
1.2.1国外发展现状
1.2.2国内发展现状
1.3存在的问题
1.4本文拟使用的方案
第2章 机器人的手部设计
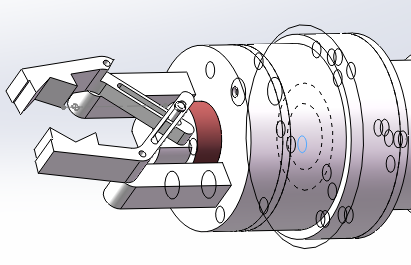
2.1 机器人的总体方案设计
2.2 手部设计要求
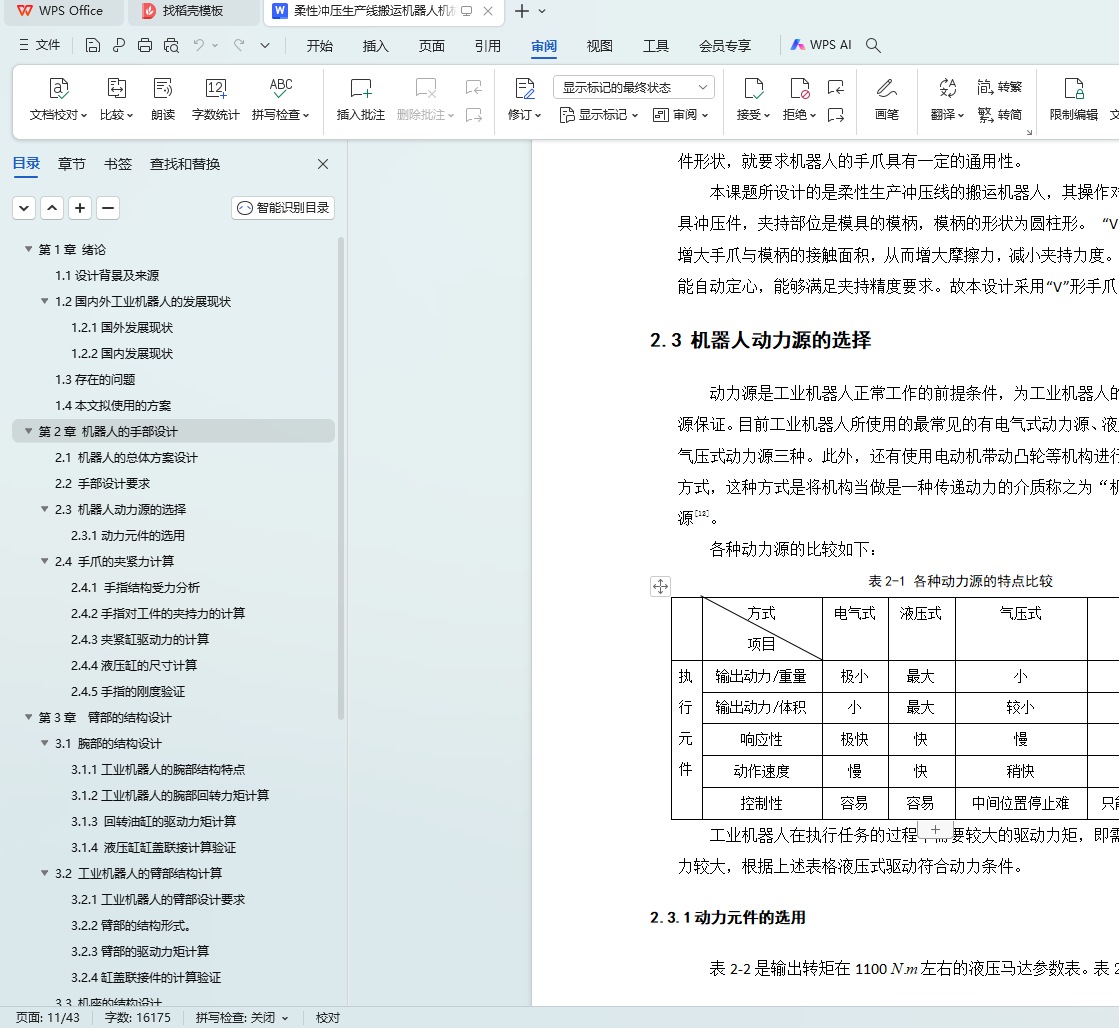
2.3 机器人动力源的选择
2.3.1动力元件的选用
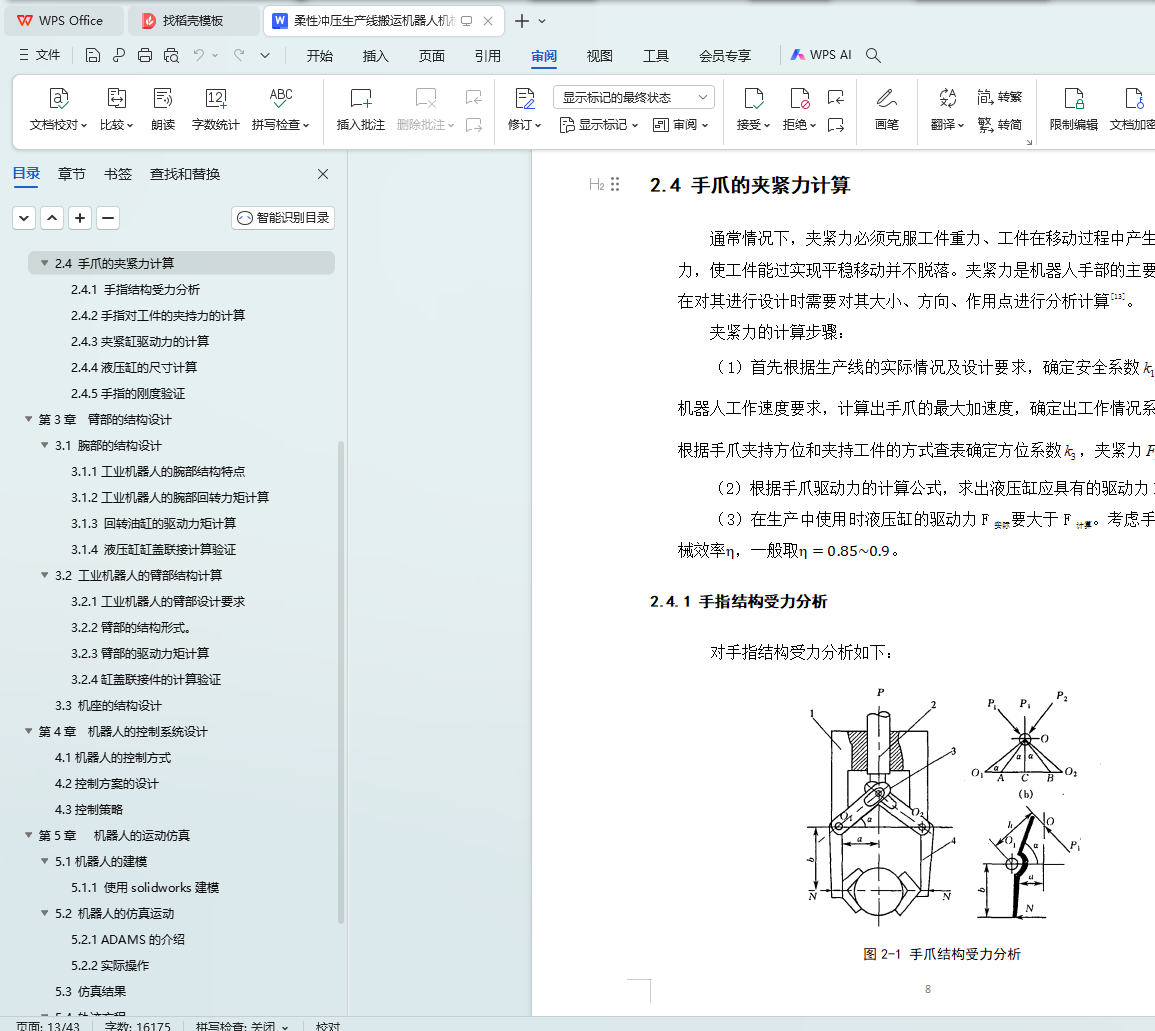
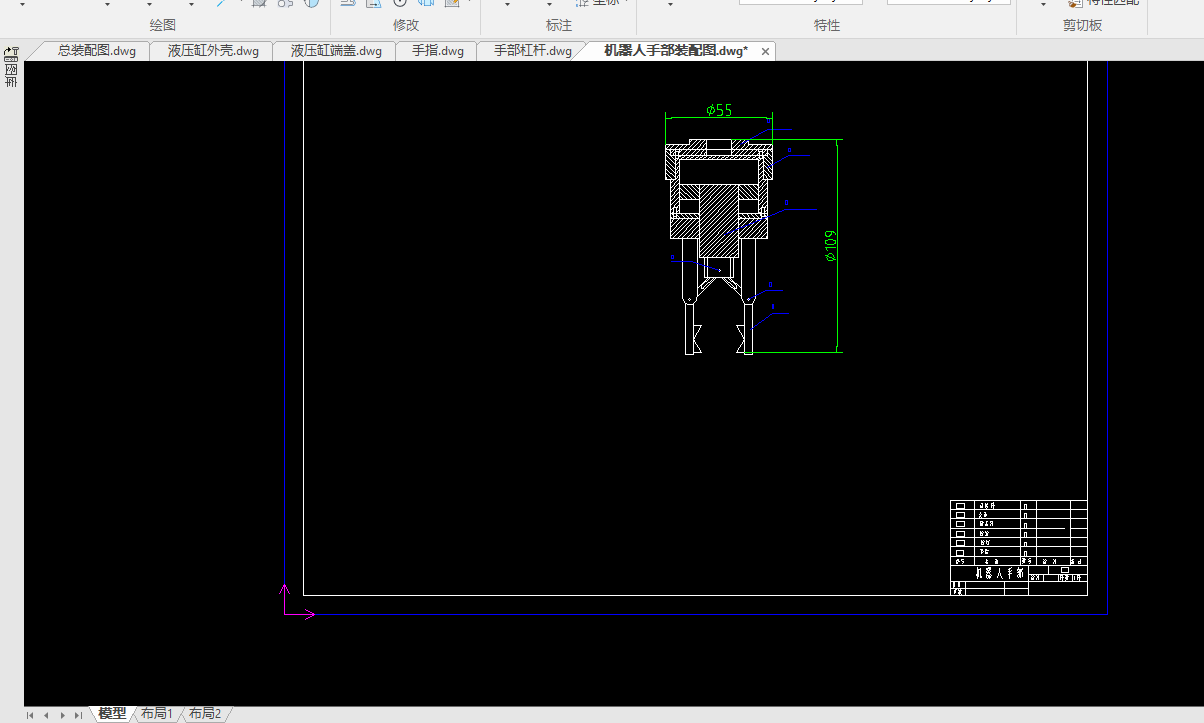
2.4 手爪的夹紧力计算
2.4.1 手指结构受力分析
2.4.2手指对工件的夹持力的计算
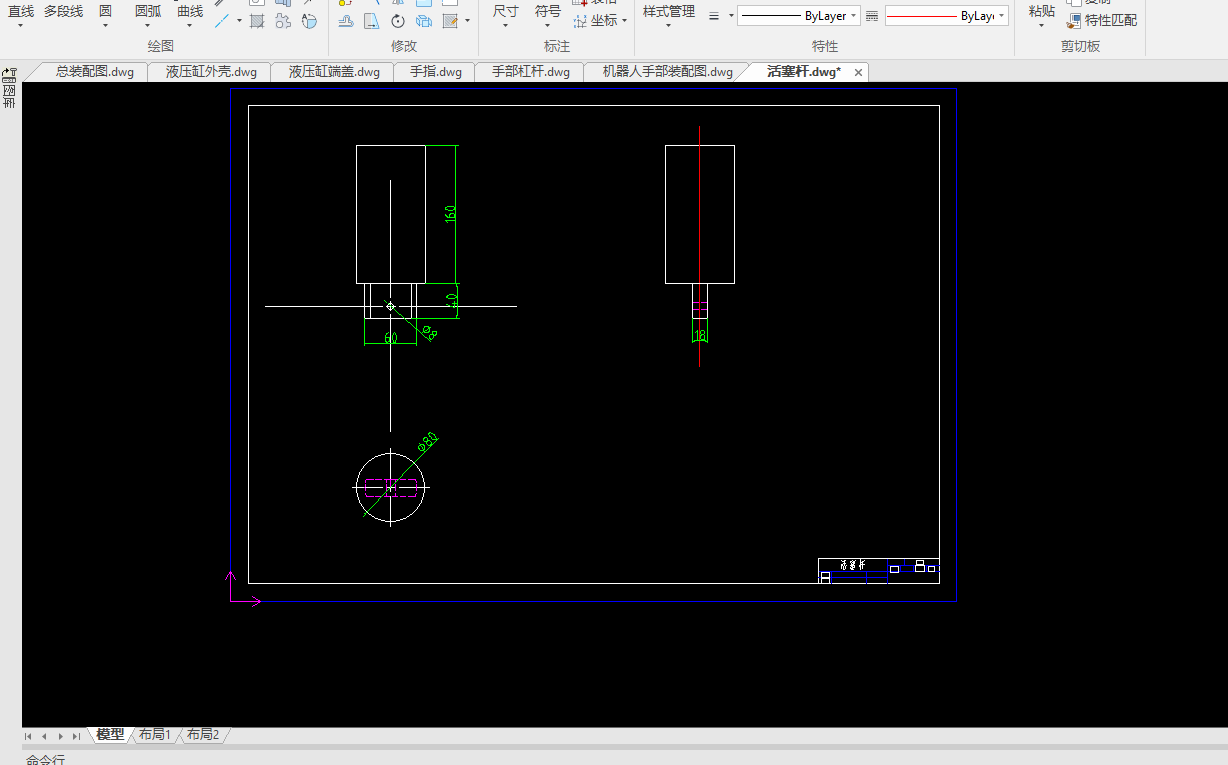
2.4.3夹紧缸驱动力的计算
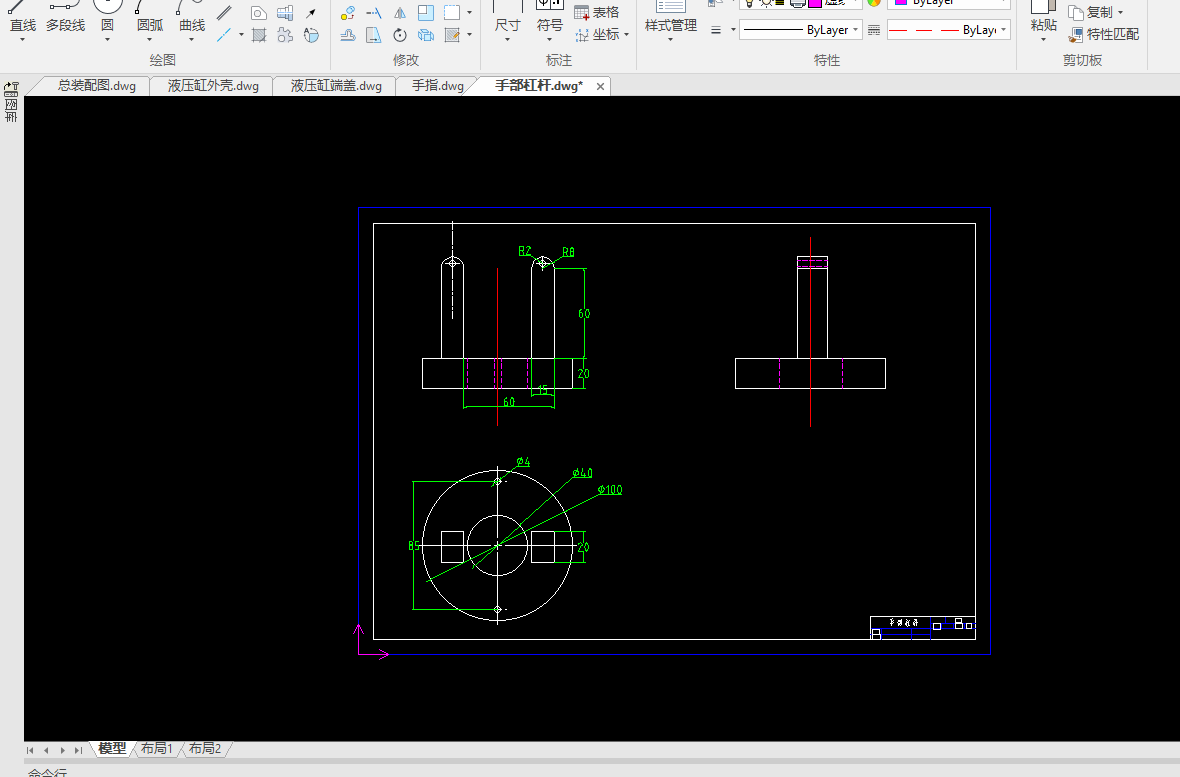
2.4.4液压缸的尺寸计算
2.4.5手指的刚度验证
第3章 臂部的结构设计
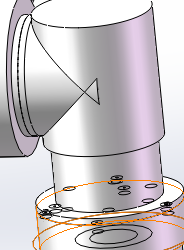
3.1 腕部的结构设计
3.1.1工业机器人的腕部结构特点
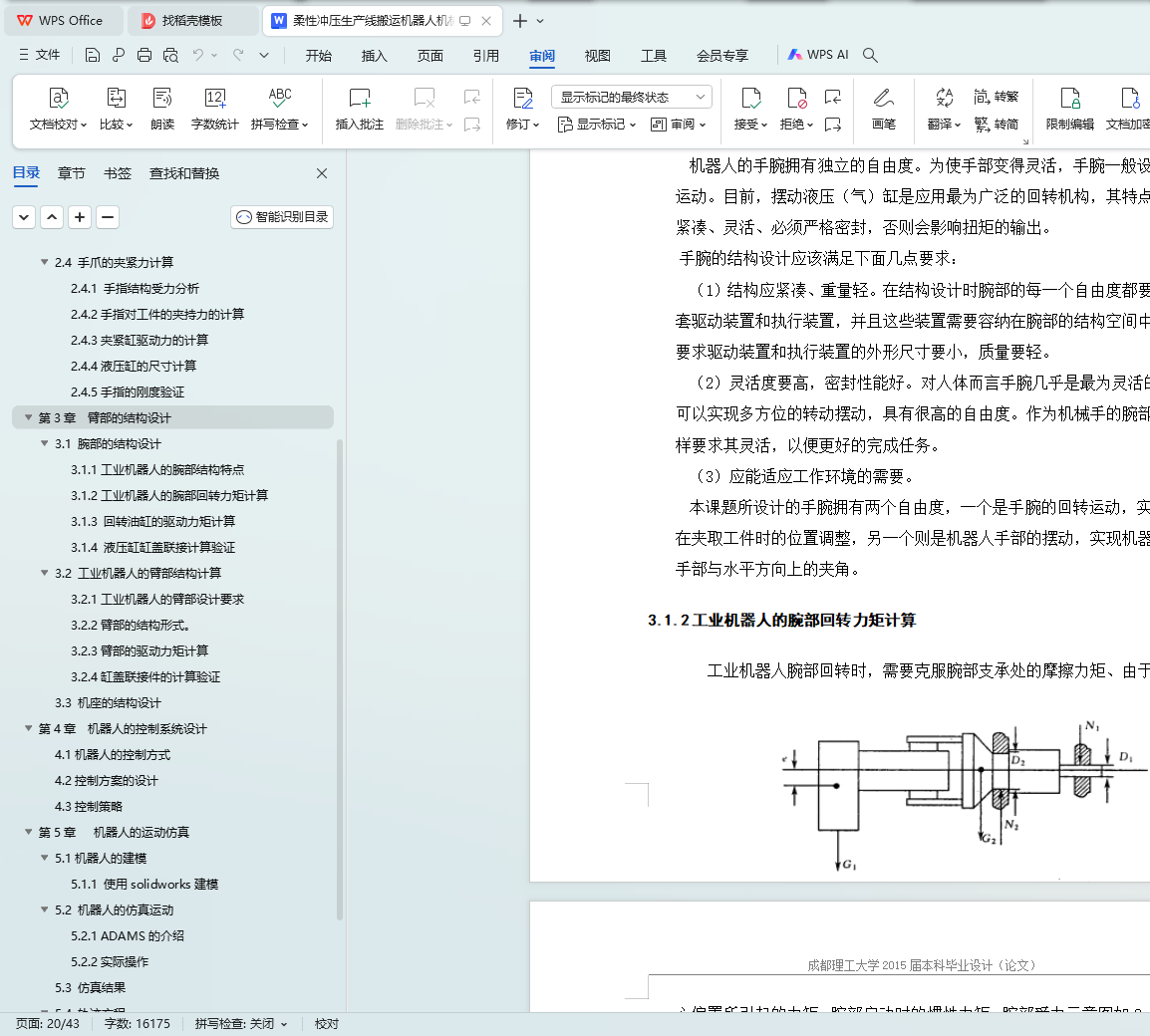
3.1.2工业机器人的腕部回转力矩计算
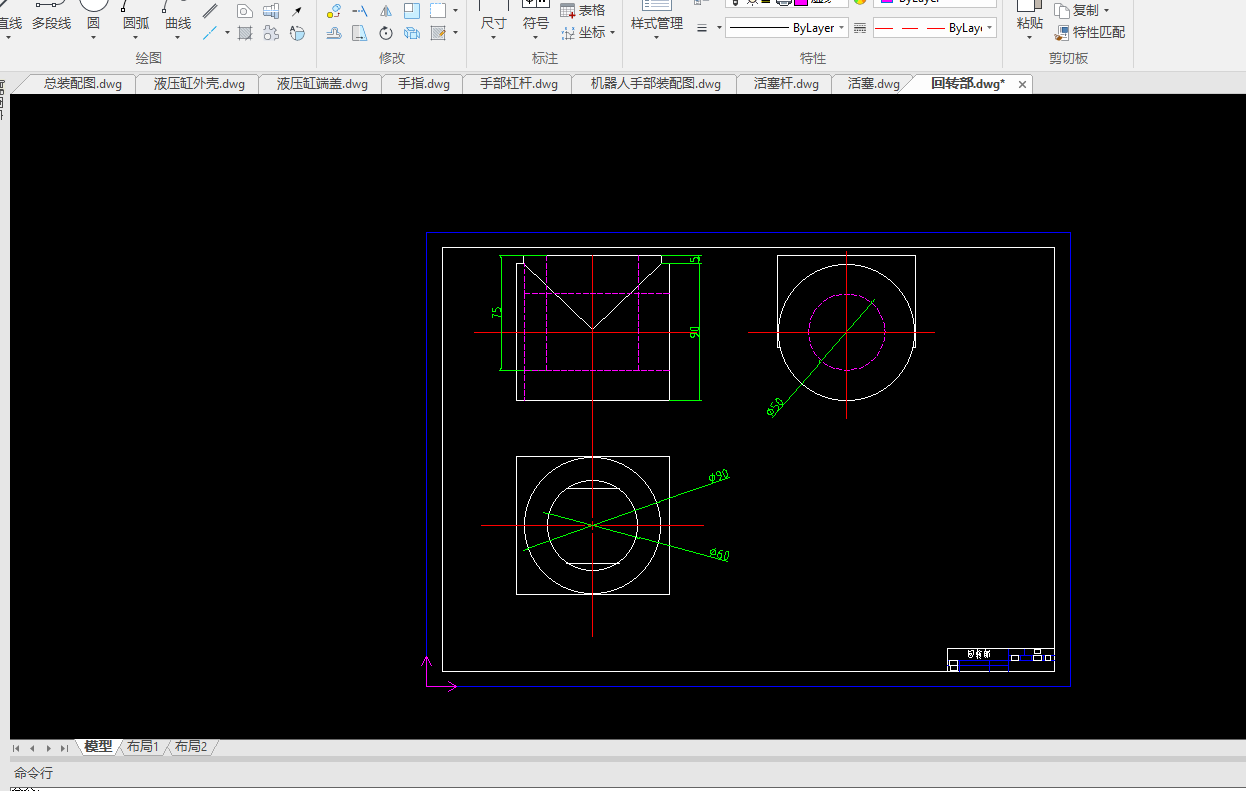
3.1.3 回转油缸的驱动力矩计算
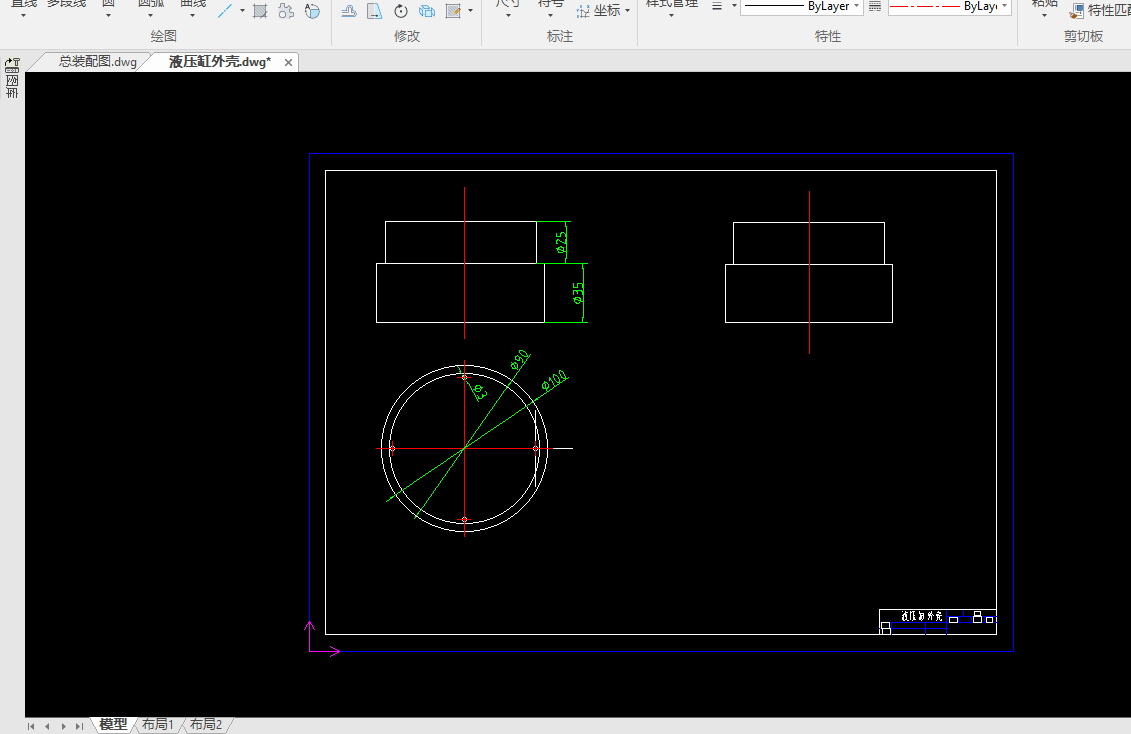
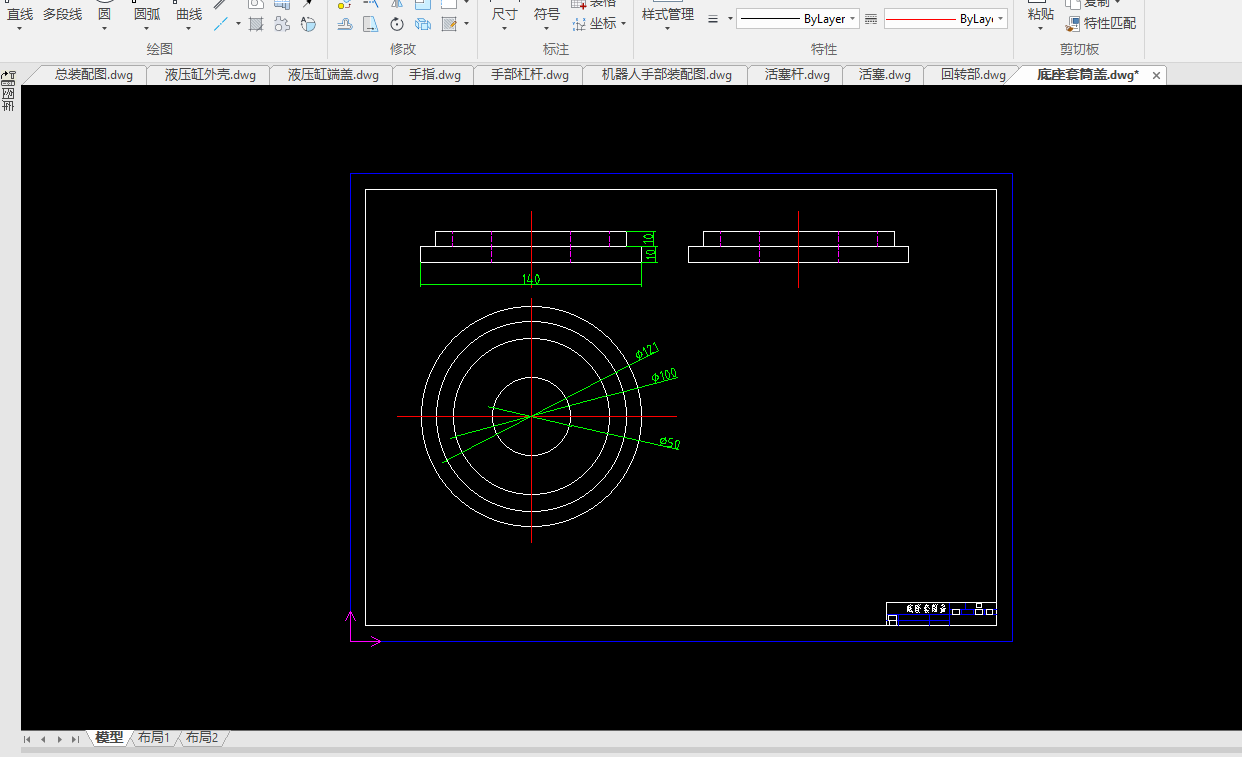
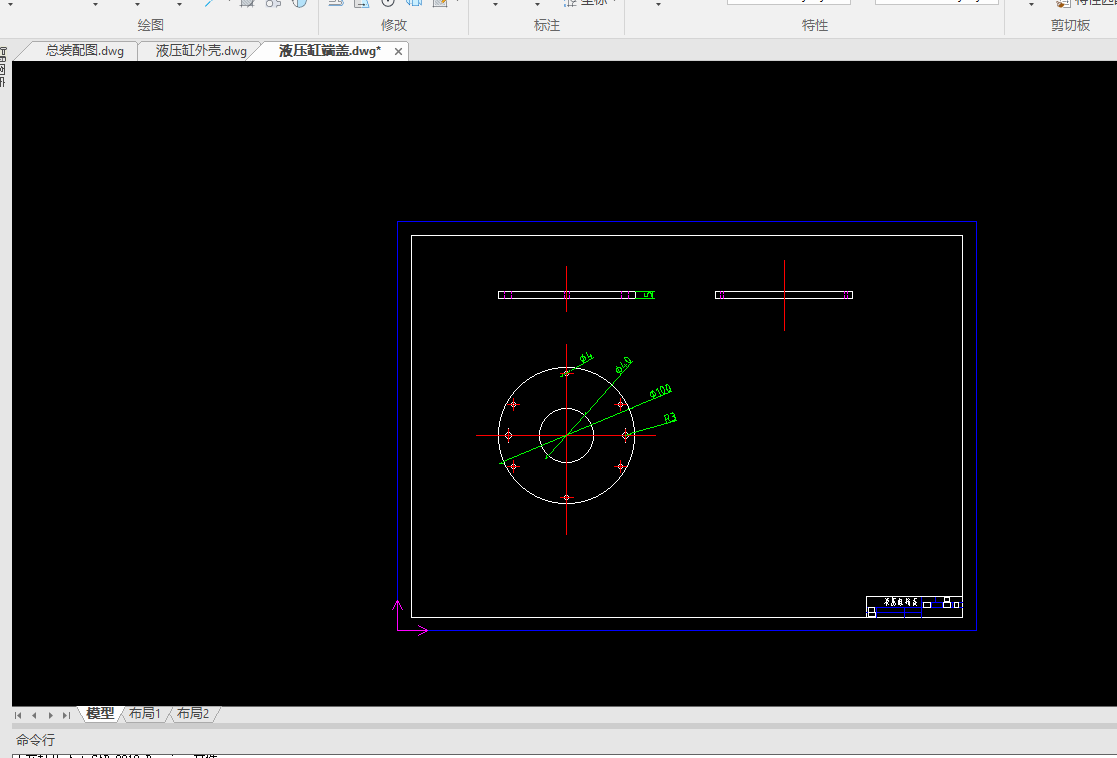
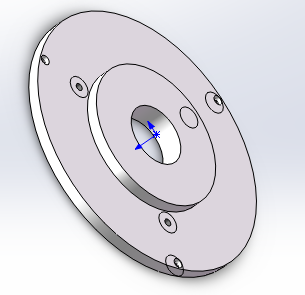
3.1.4 液压缸缸盖联接计算验证
3.2 工业机器人的臂部结构计算
3.2.1工业机器人的臂部设计要求
3.2.2臂部的结构形式。
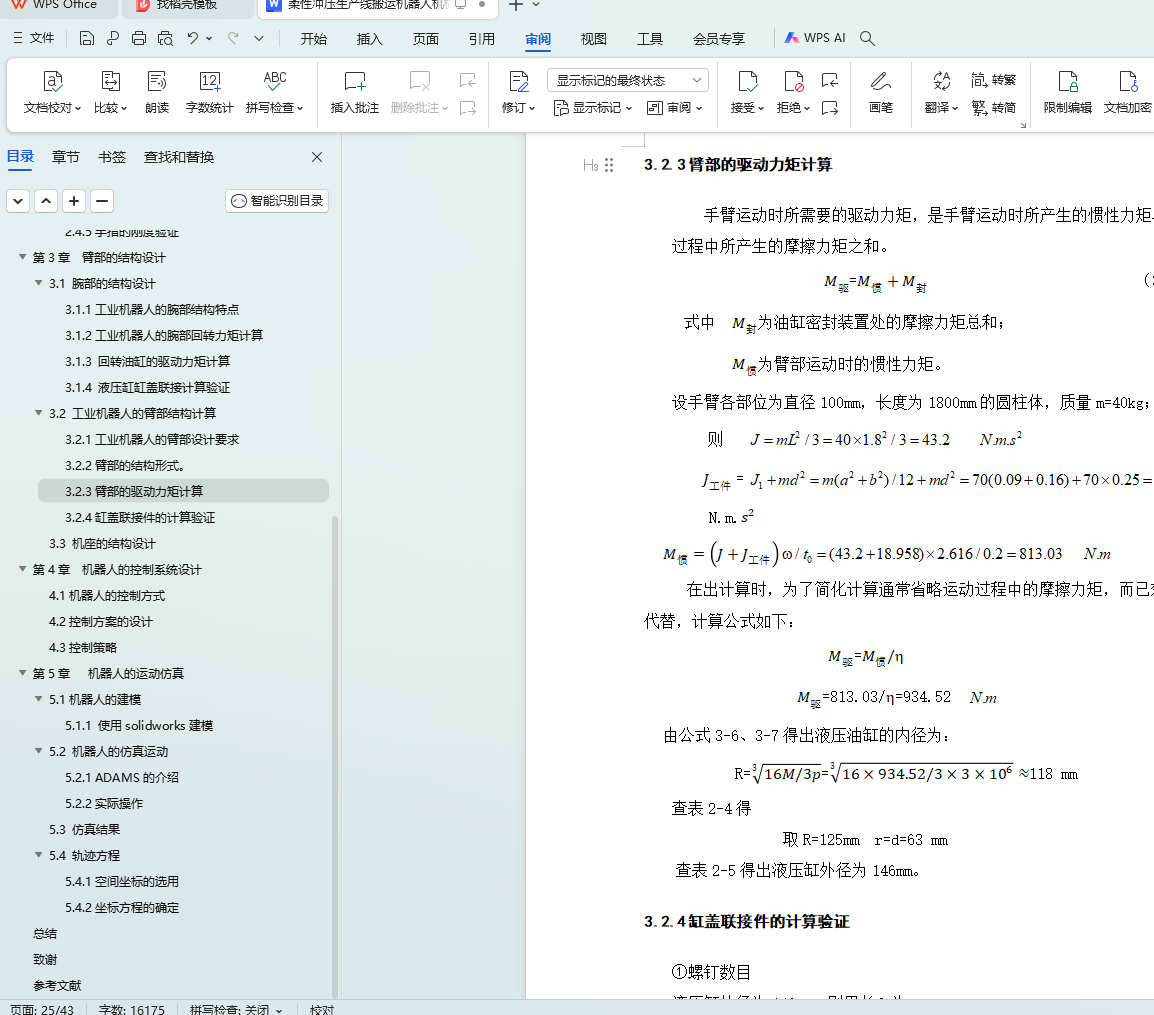
3.2.3臂部的驱动力矩计算
3.2.4缸盖联接件的计算验证
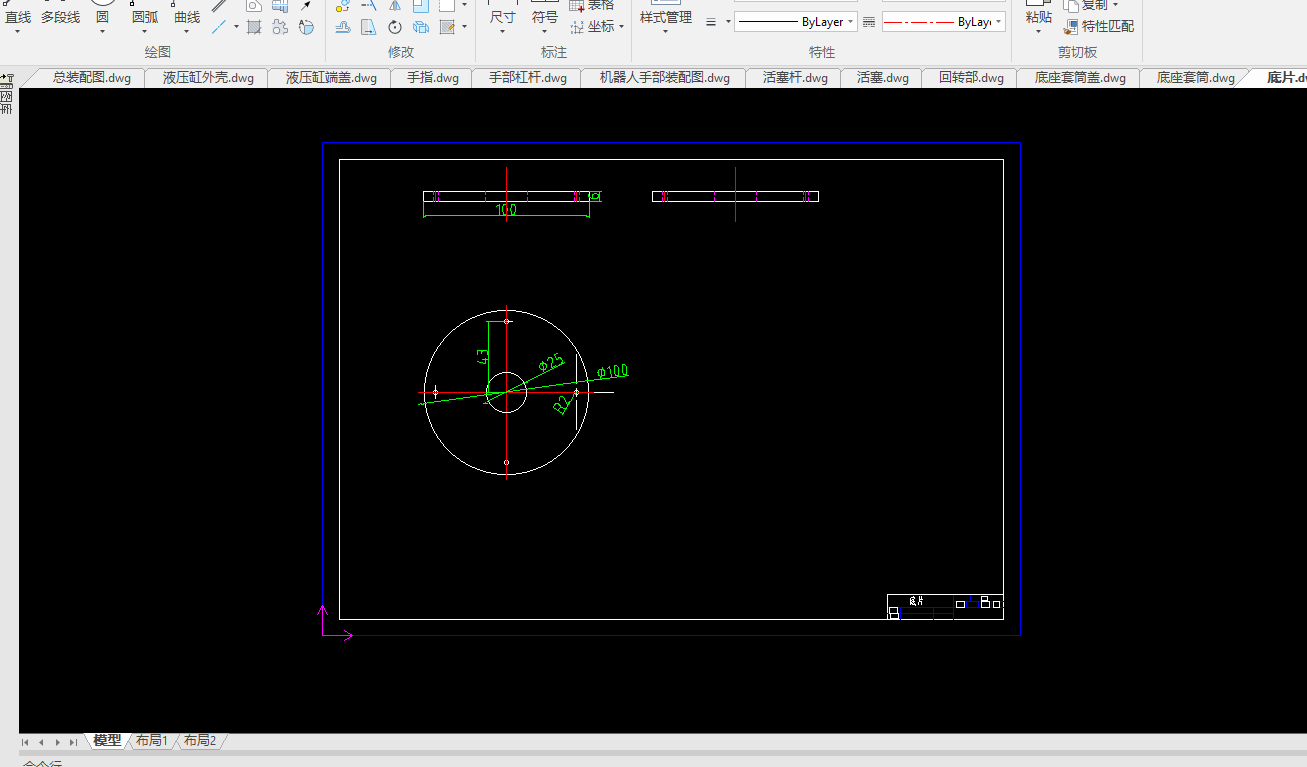
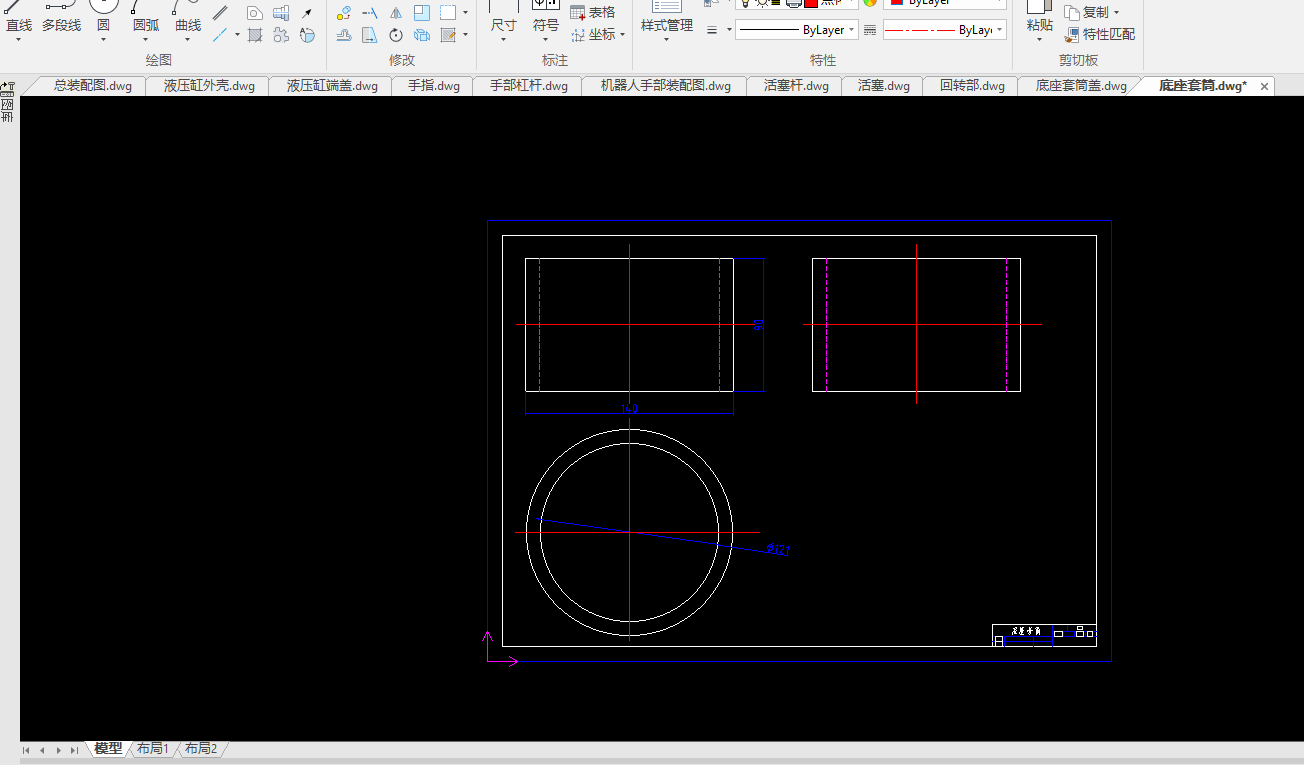
3.3 机座的结构设计
第4章 机器人的控制系统设计
4.1机器人的控制方式
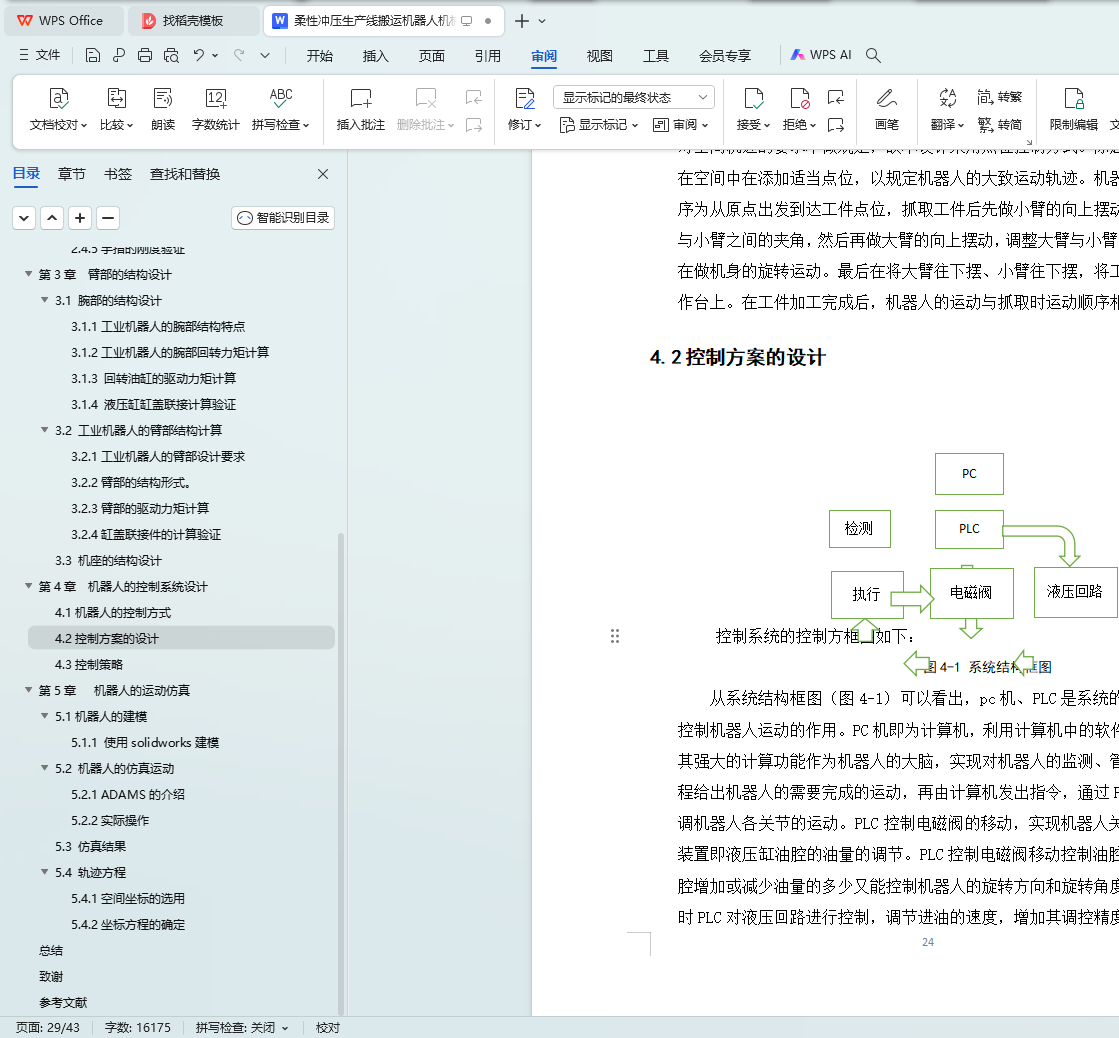
4.2控制方案的设计
4.3控制策略
第5章 机器人的运动仿真
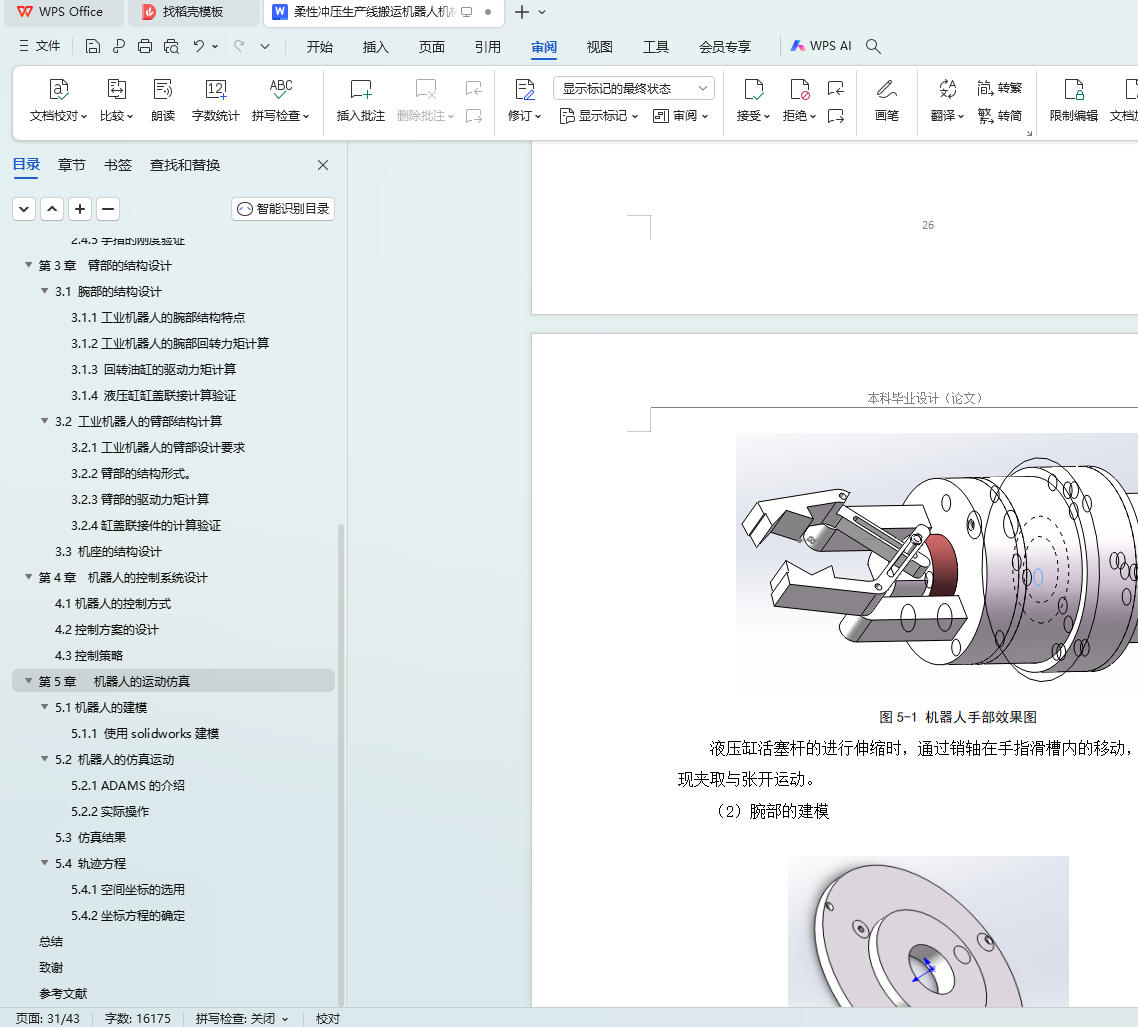
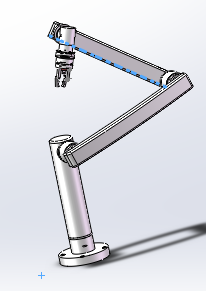
5.1机器人的建模
5.1.1 使用solidworks建模
5.2 机器人的仿真运动
5.2.1 ADAMS的介绍
5.2.2实际操作
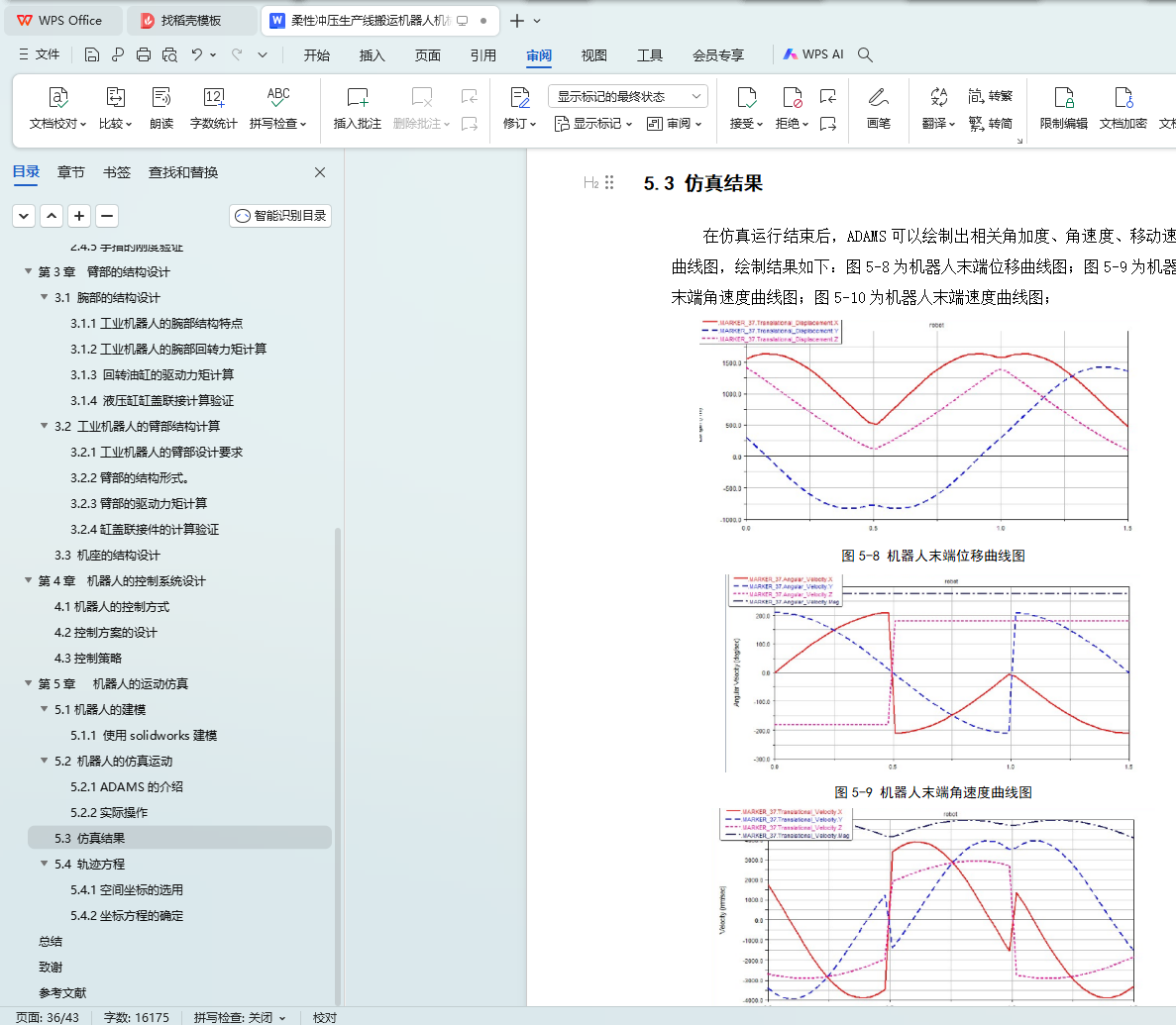
5.3 仿真结果
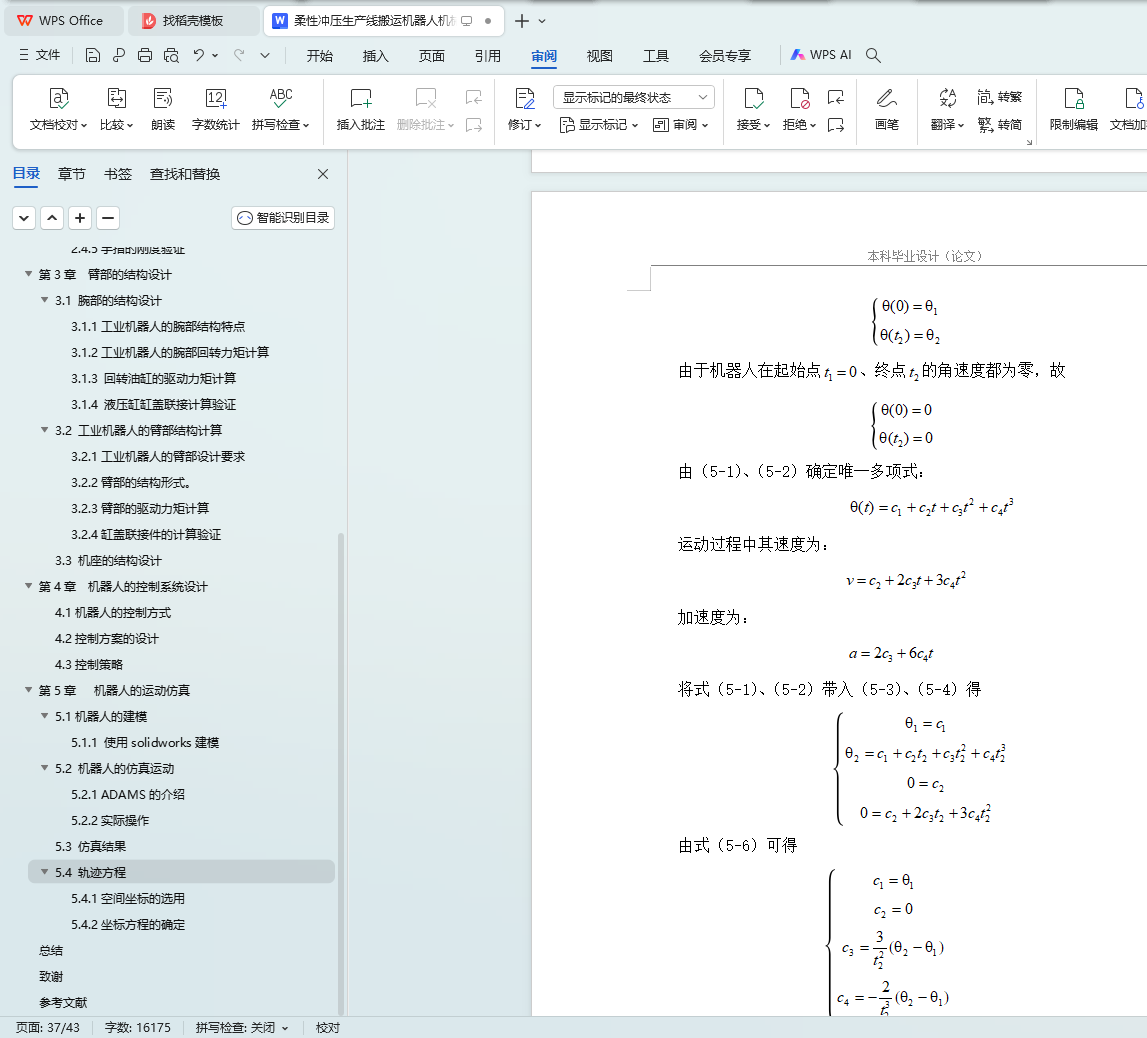
5.4 轨迹方程
5.4.1空间坐标的选用
5.4.2坐标方程的确定
总结
致谢
参考文献