摘 要
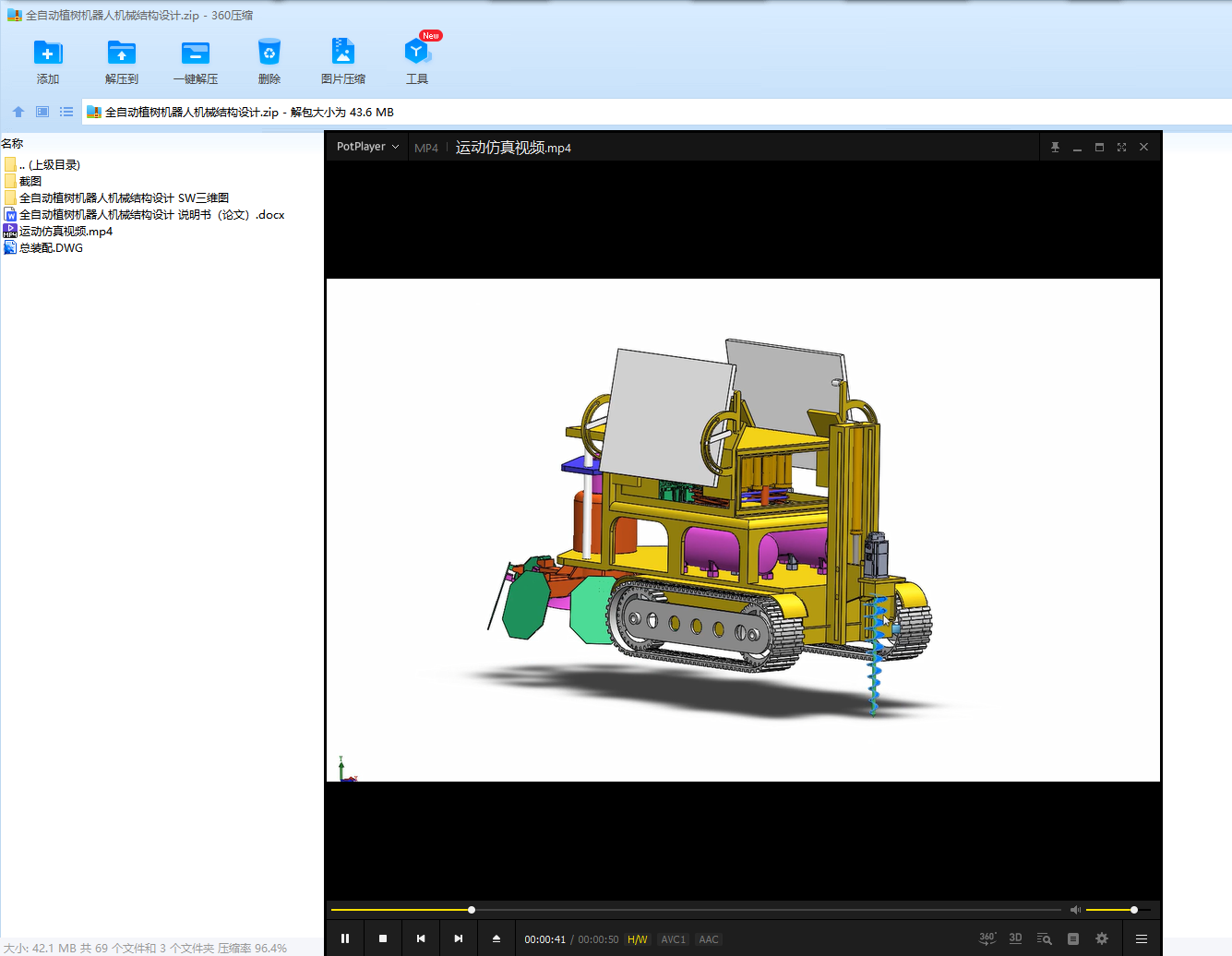
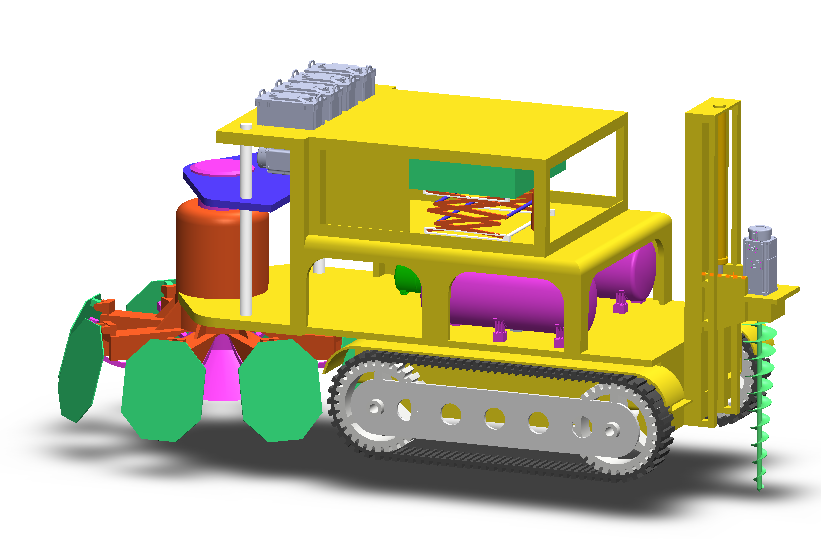
新时代背景下,我国水土流失的情况愈加严峻,土地荒漠化等生态环境问题也亟待解决,然而,现阶段我国的生态修复手段较为单一,基本依靠人工等传统方式开展生态环境修复工作,依靠新兴科技出现的相关装置也存在不智能、耗能高、无法适应复杂的工作环境等问题,基于此,本团队设计了一款全自动植树机器人,该装置主要由五部分构成,自主植树模块、拢土夯实模块、智能控制模块;通过各个模块相互配合, 协同工作,使得装置能够为生态环境的修复出力,提供了一种新的生态环境修复方案。本装置的创新点如下:提高了栽种植被的存活率,降低生态修复成本;装置采用履带化行进作业方式,能够适应各种复杂的工作环境,适应性强;智能植树技术,播种速度提升,装置工作效率大大提高且进一步降低了人工工作强度及成本;巧妙采用多种机构实现树苗栽种全过程,节能减排;拢土夯实模块可替换不同直径中空管,自适应不同种类树苗的栽种,确保树苗与地面垂直且移栽稳固;装置结构简单、易维护、成本低、高效作业,符合生态环境修复政策,市场前景广阔。
关键字:生态修复;节能减排;复杂机构;
目录
摘 要
作品内容简介
第一章 设计背景及意义
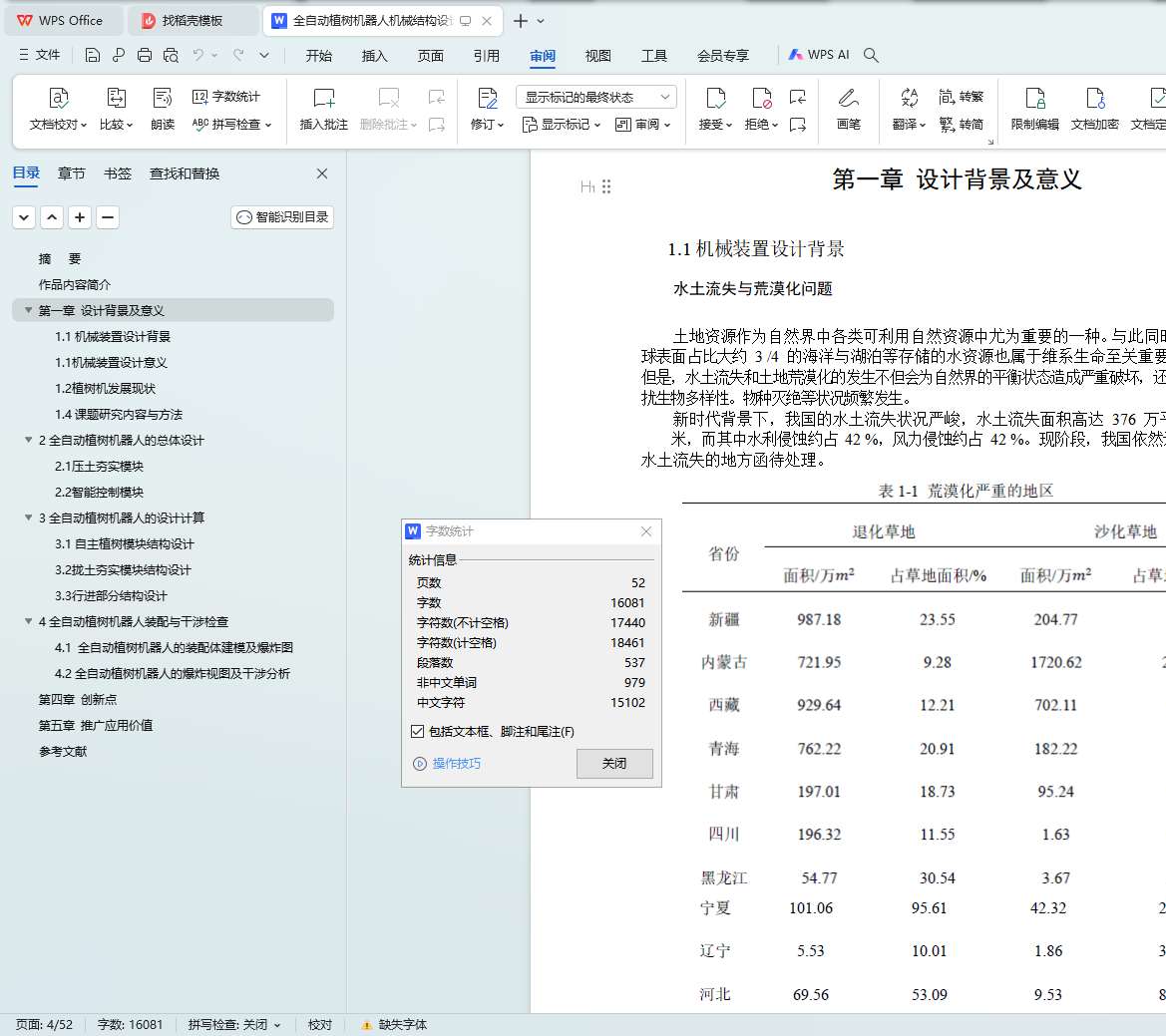
1.1机械装置设计背景
1.1 机械装置设计意义
1.2 植树机发展现状
1.4课题研究内容与方法
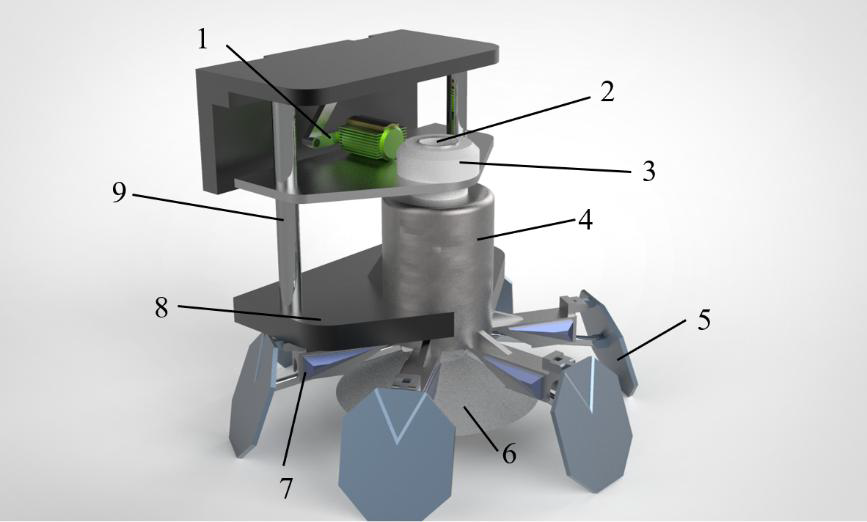
2全自动植树机器人的总体设计
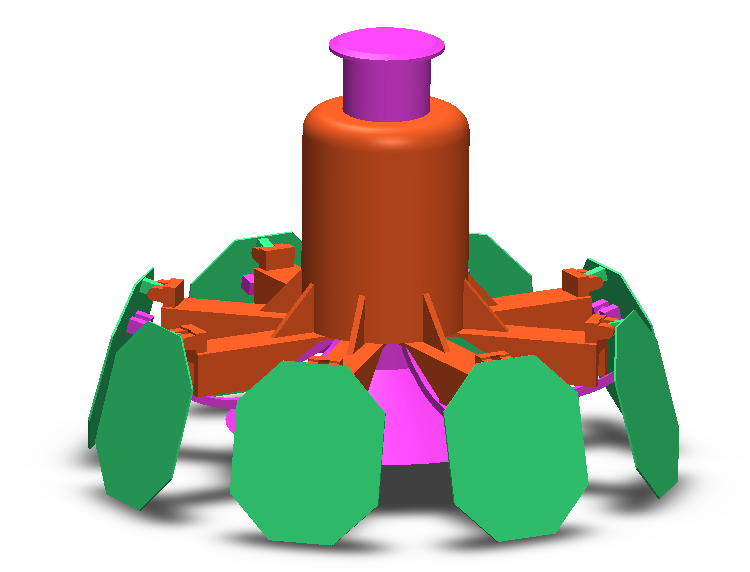
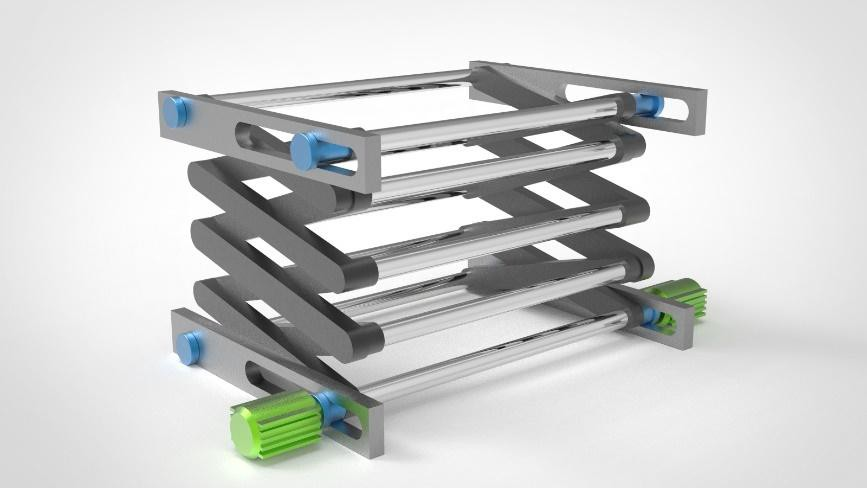
2.1 压土夯实模块
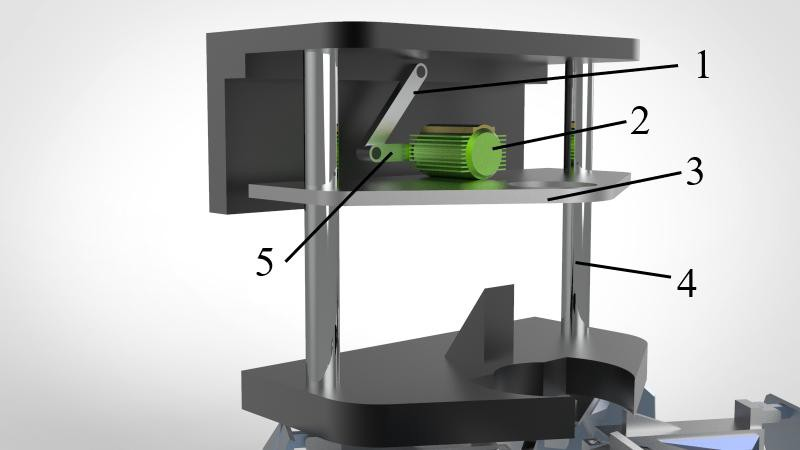
2.2 智能控制模块
3全自动植树机器人的设计计算
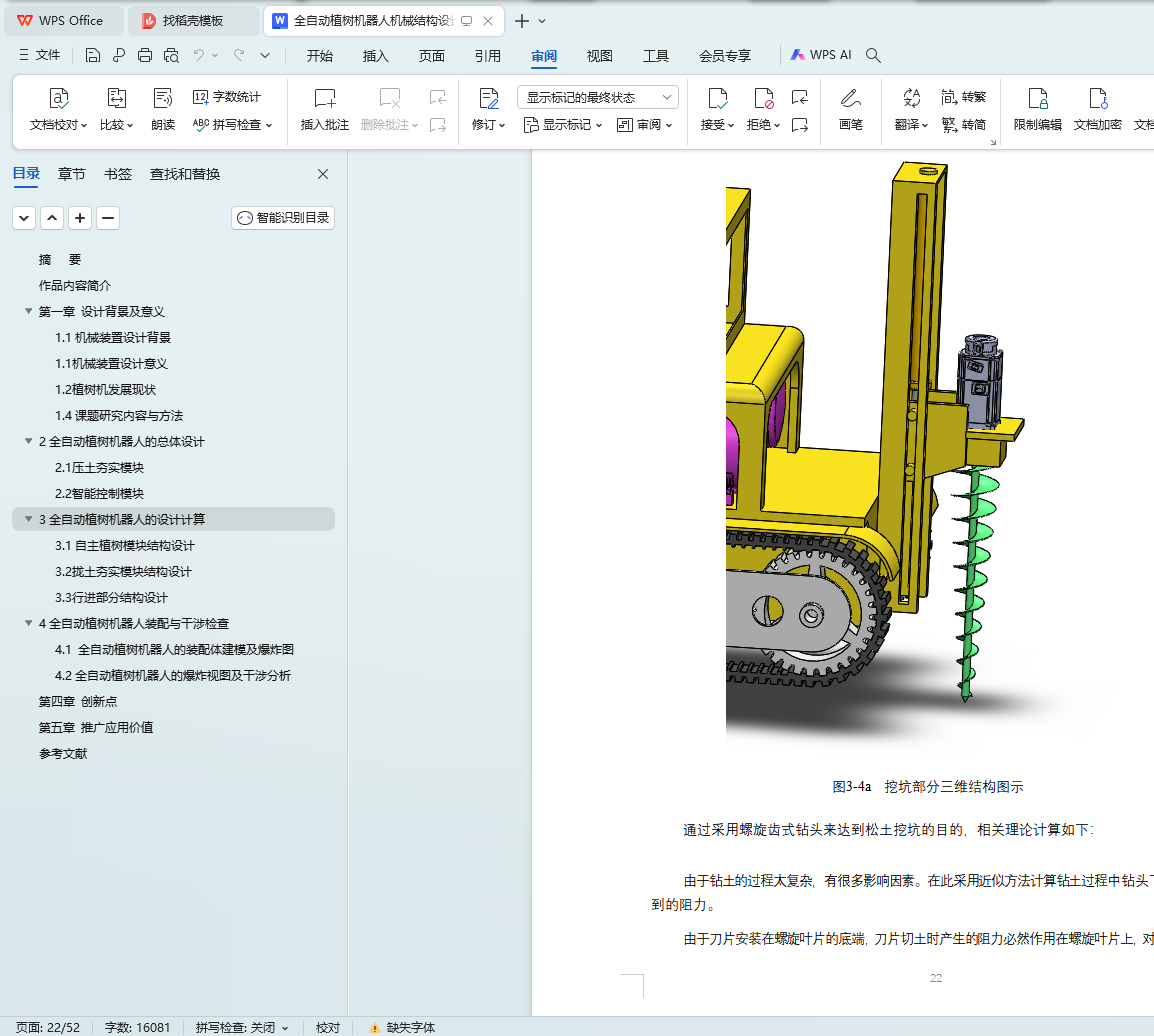
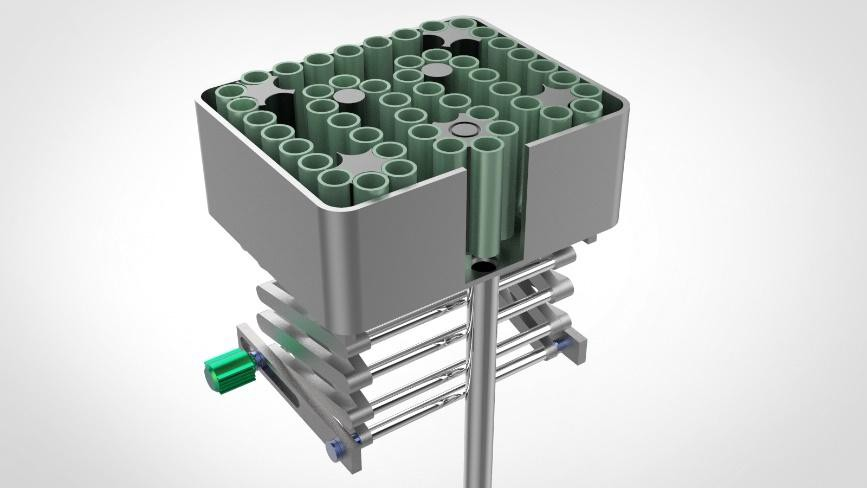
3.1自主植树模块结构设计
h
3.2 拢土夯实模块结构设计
3.3 行进部分结构设计
4全自动植树机器人装配与干涉检查
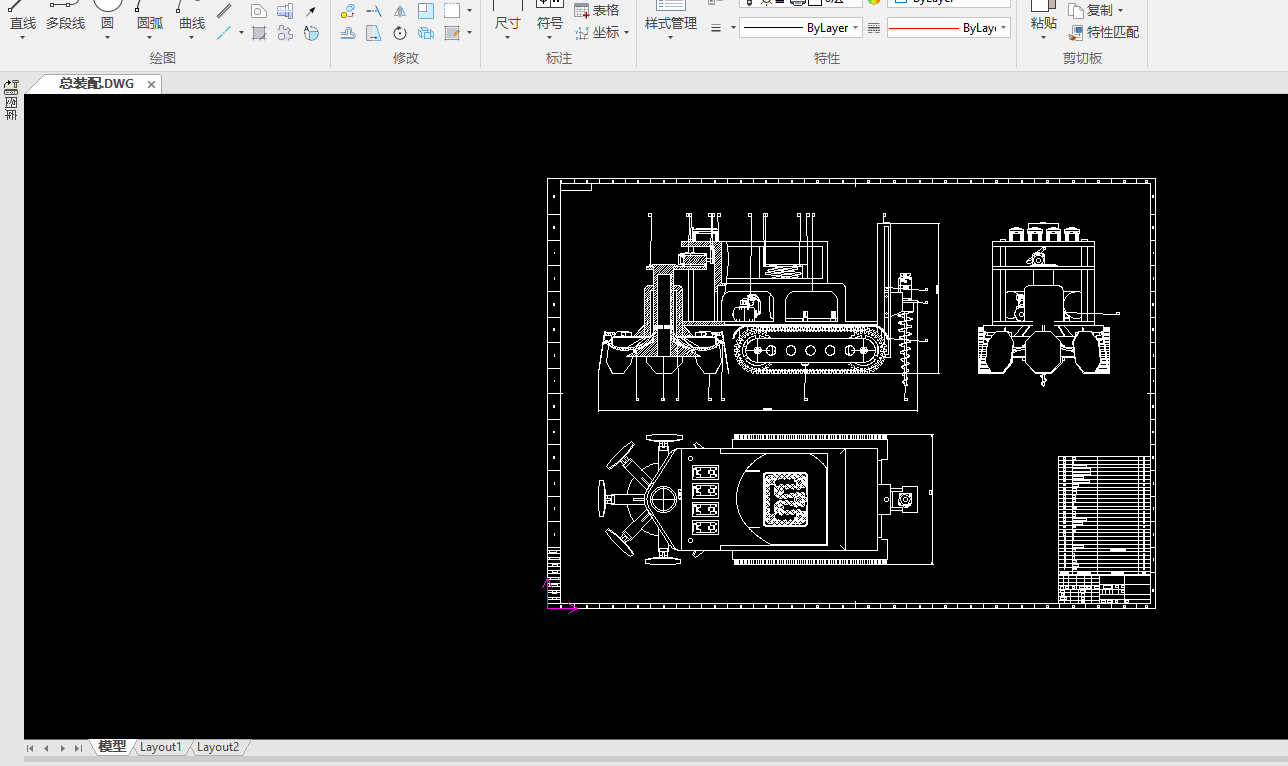
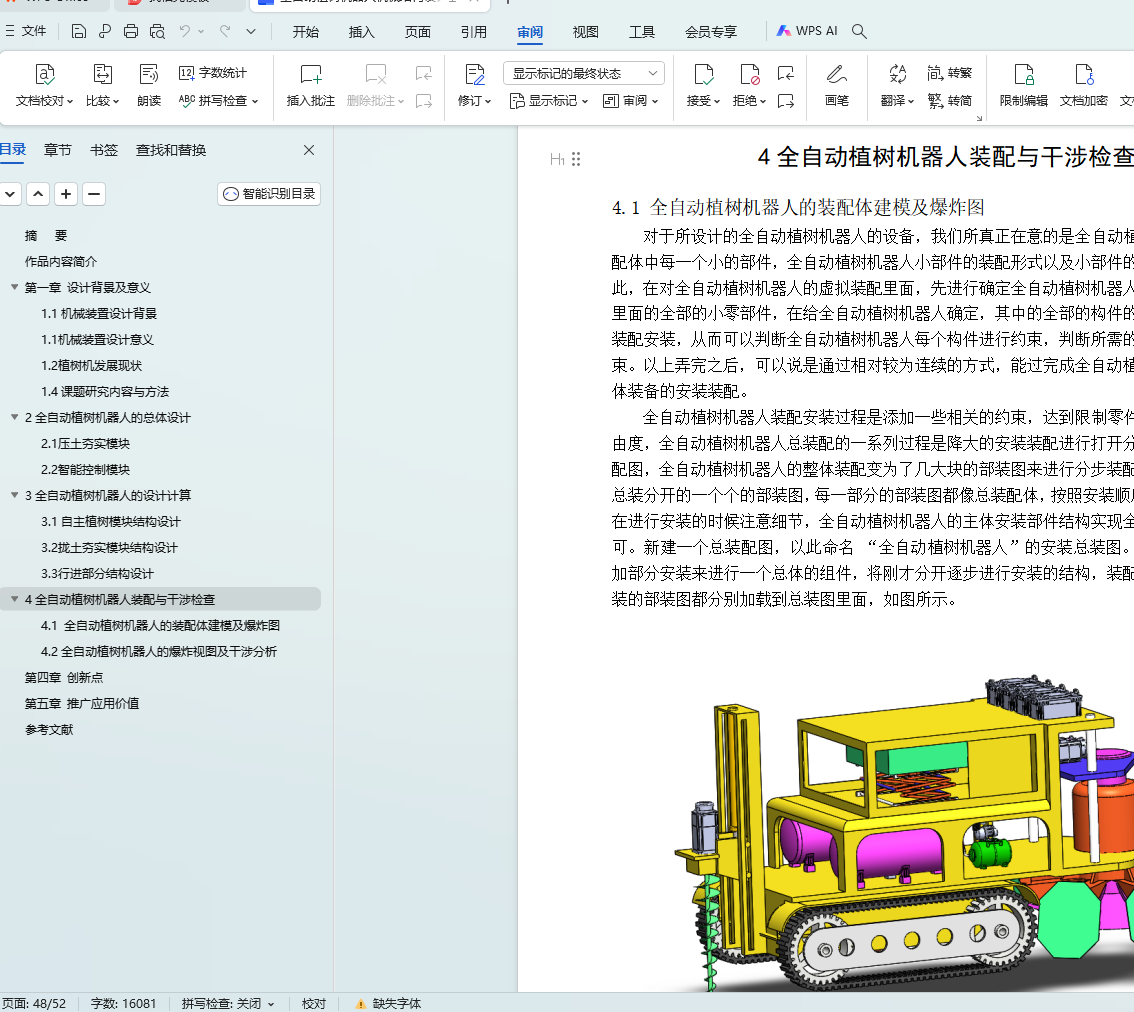
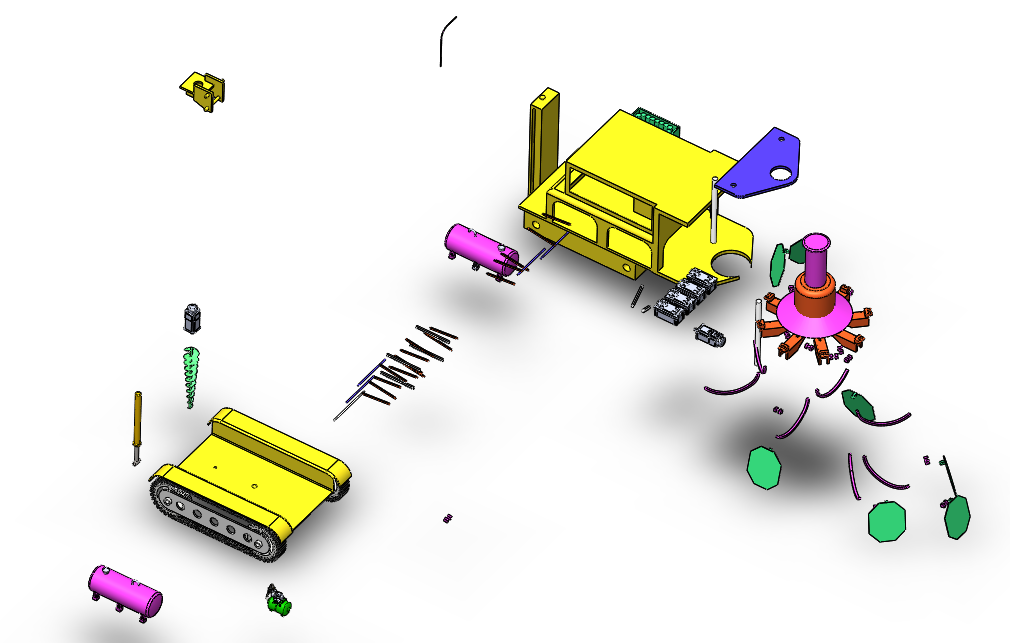
4.1 全自动植树机器人的装配体建模及爆炸图
4.2全自动植树机器人的爆炸视图及干涉分析
第四章 创新点
第五章 推广应用价值
参考文献