摘 要
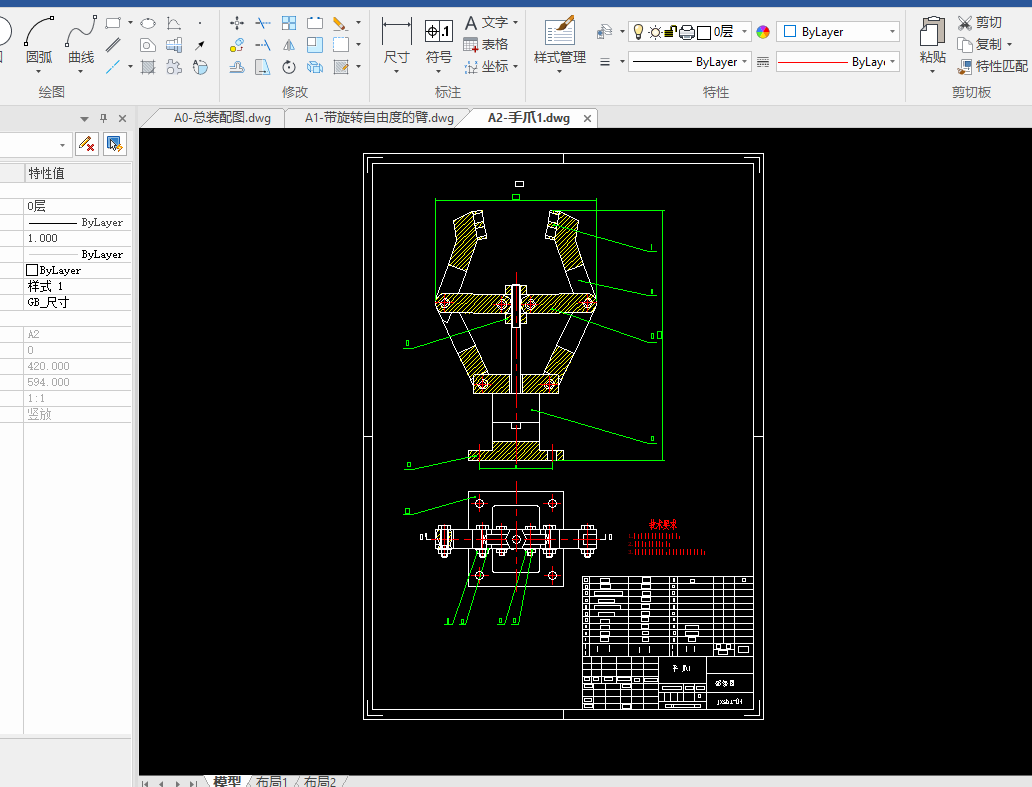
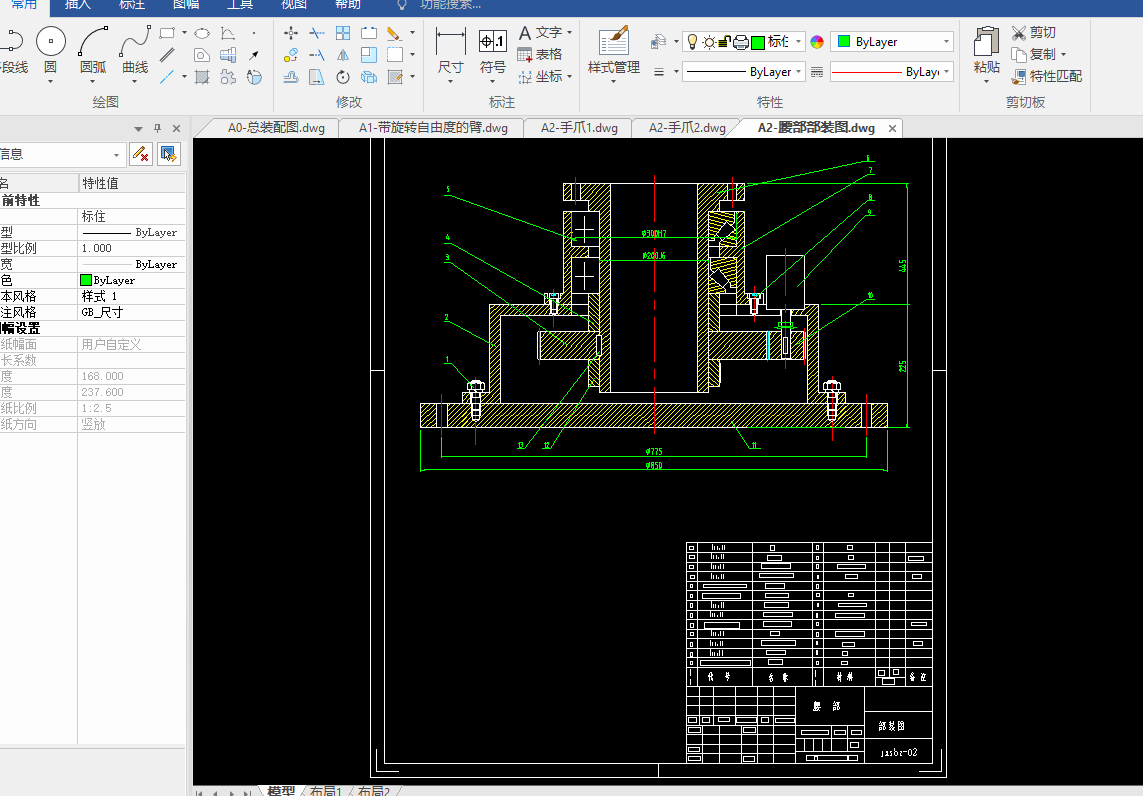
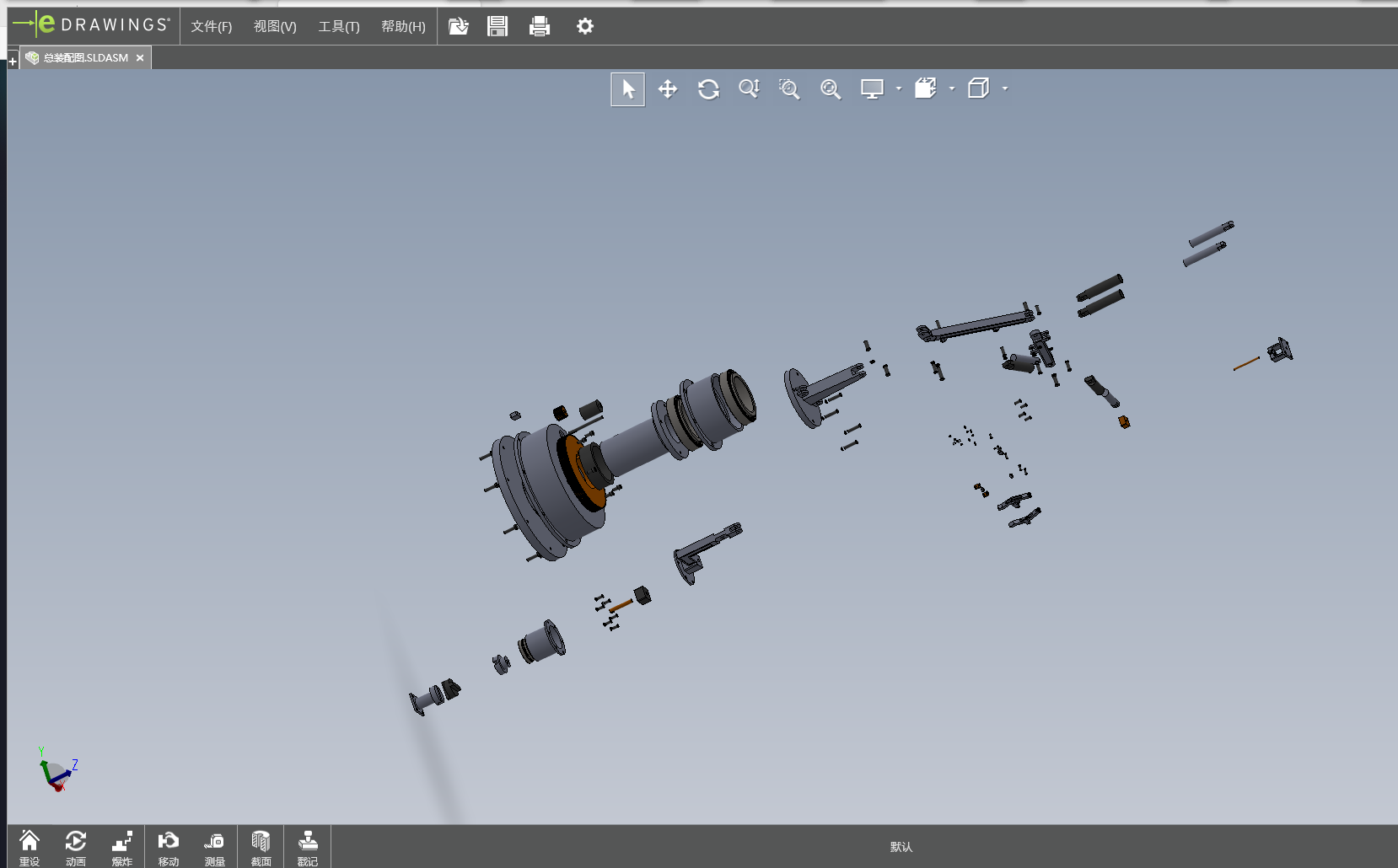
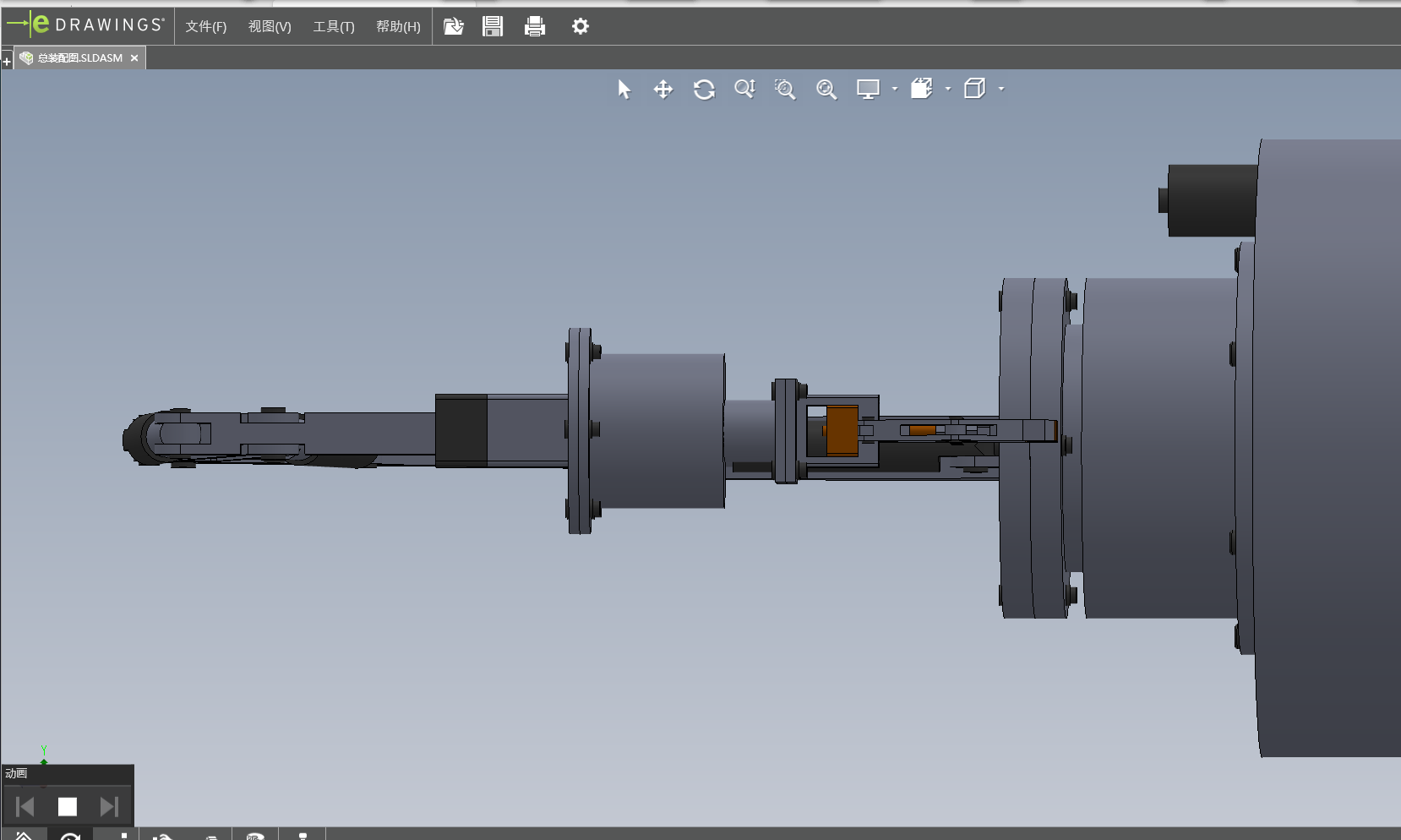
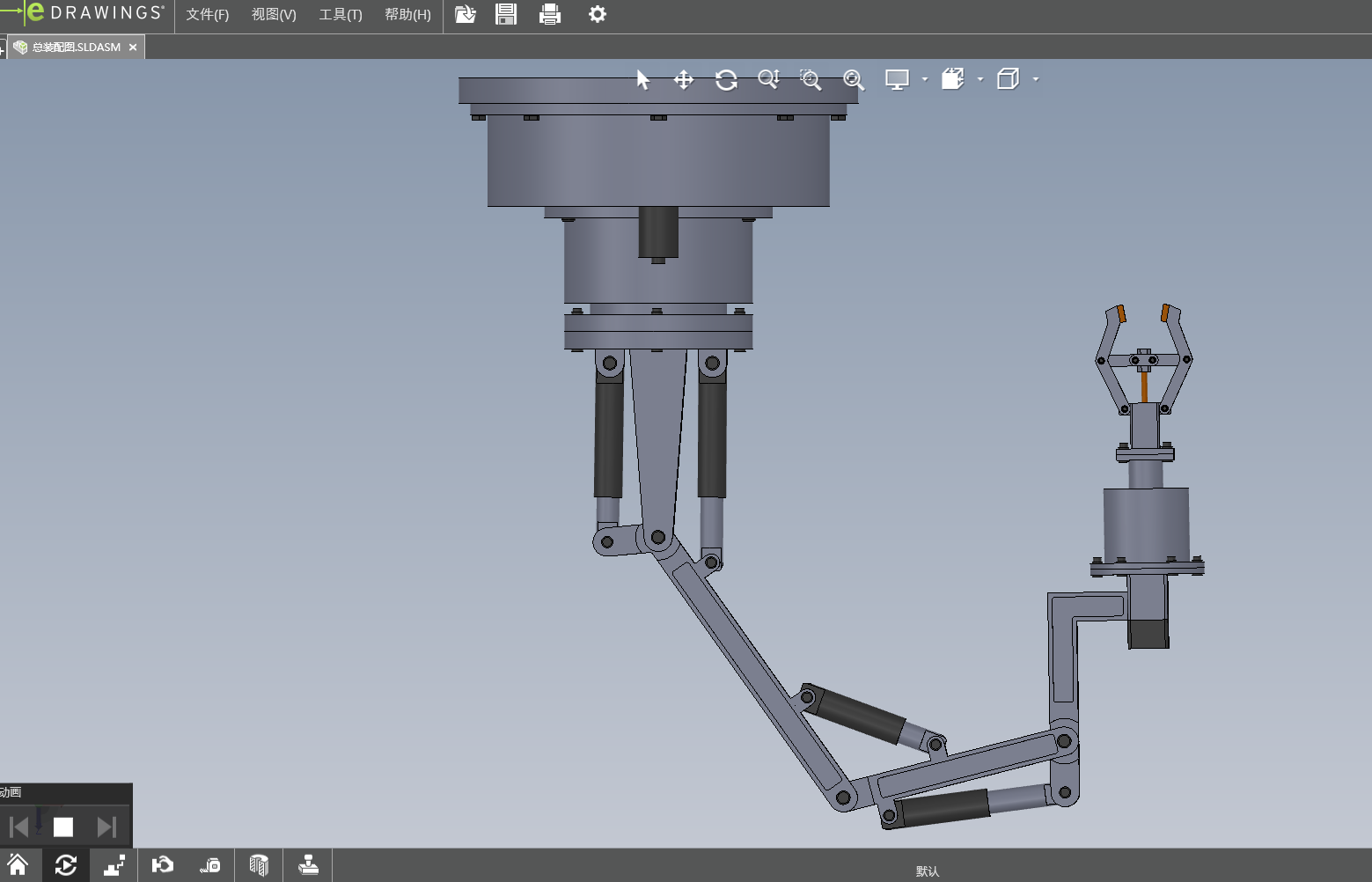
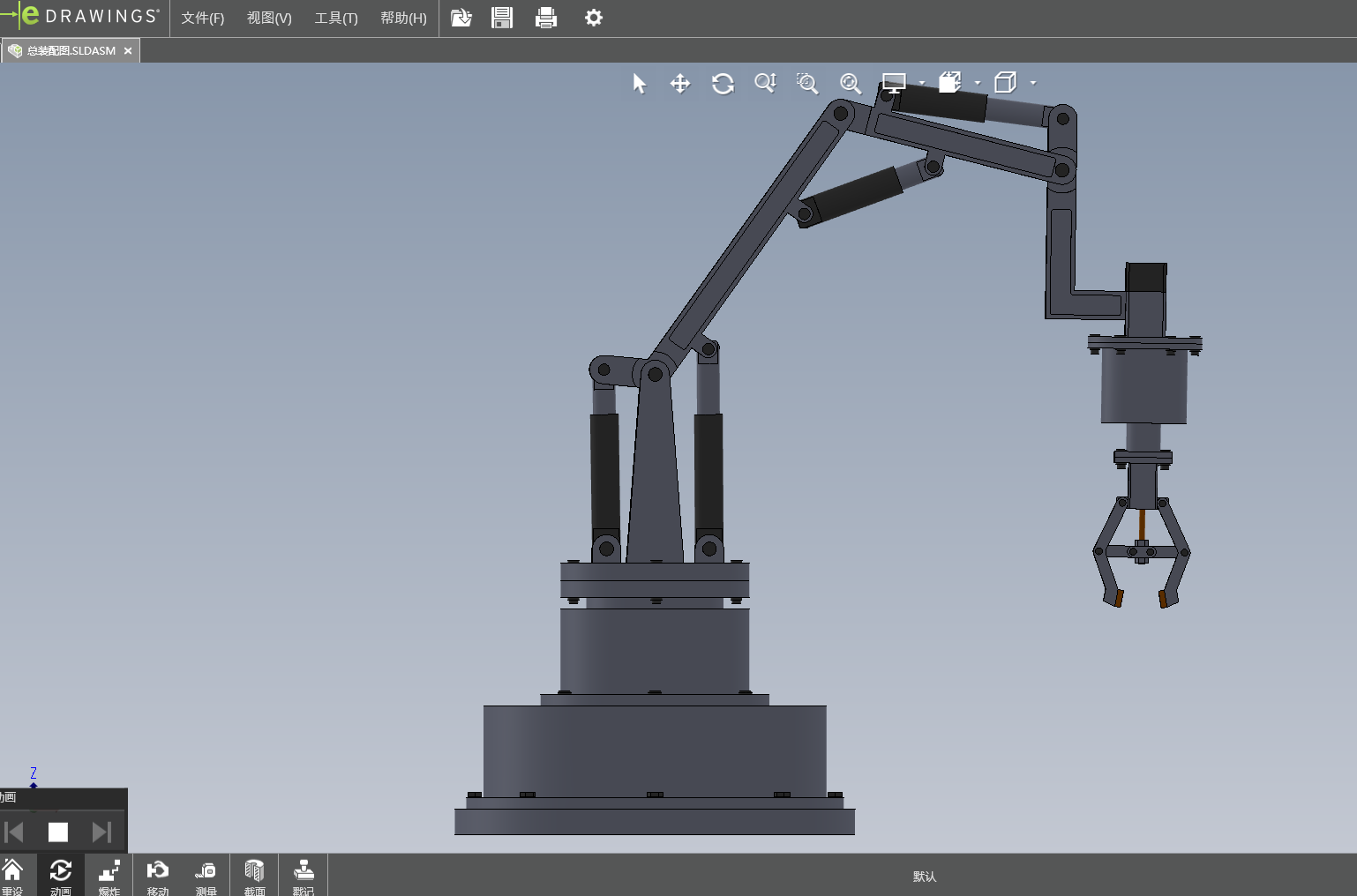
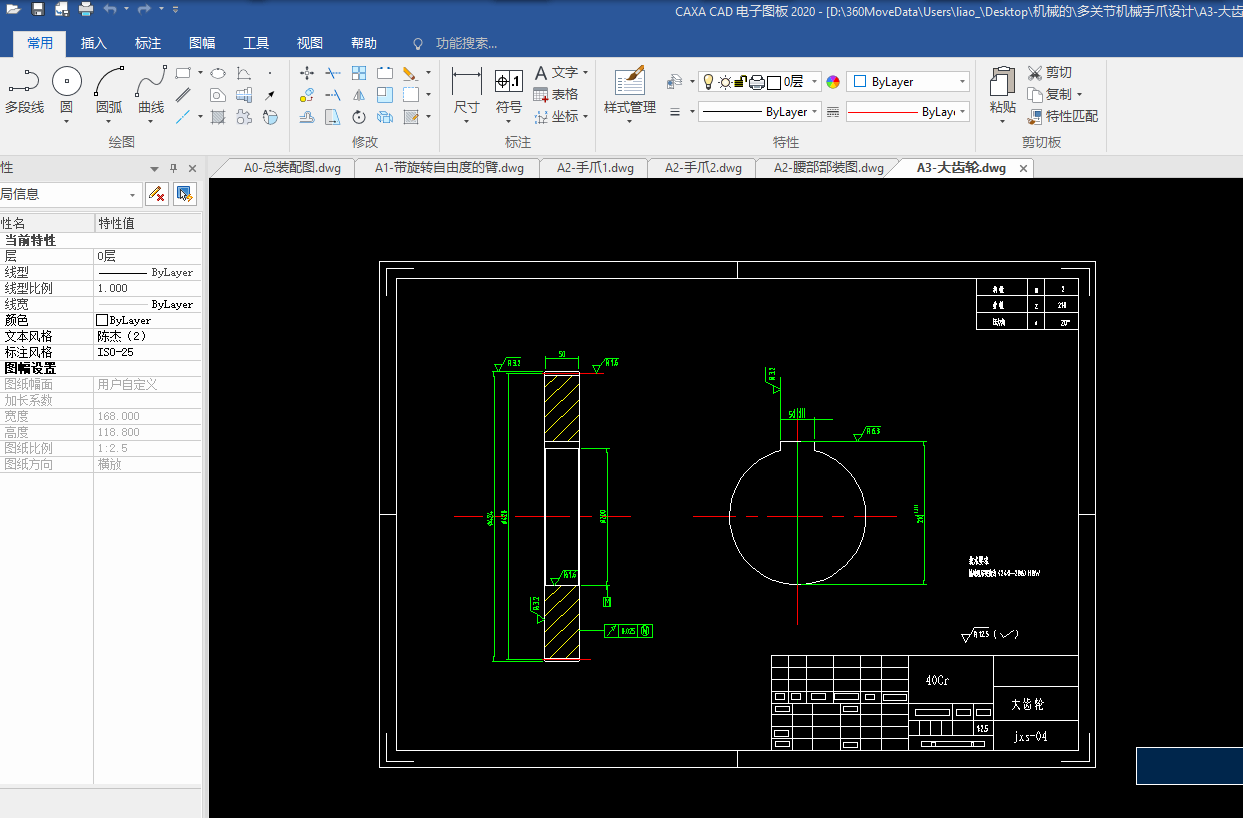
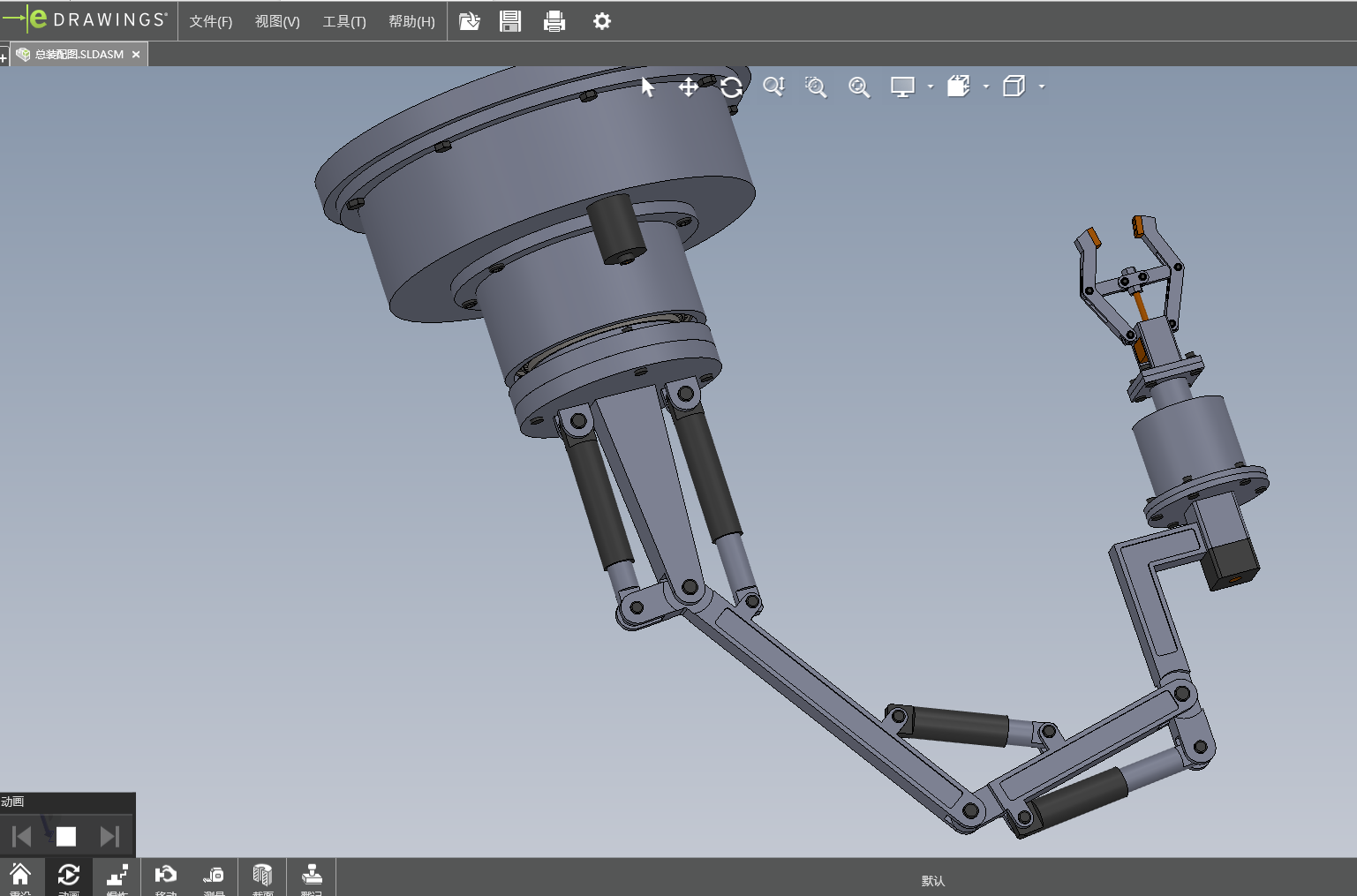
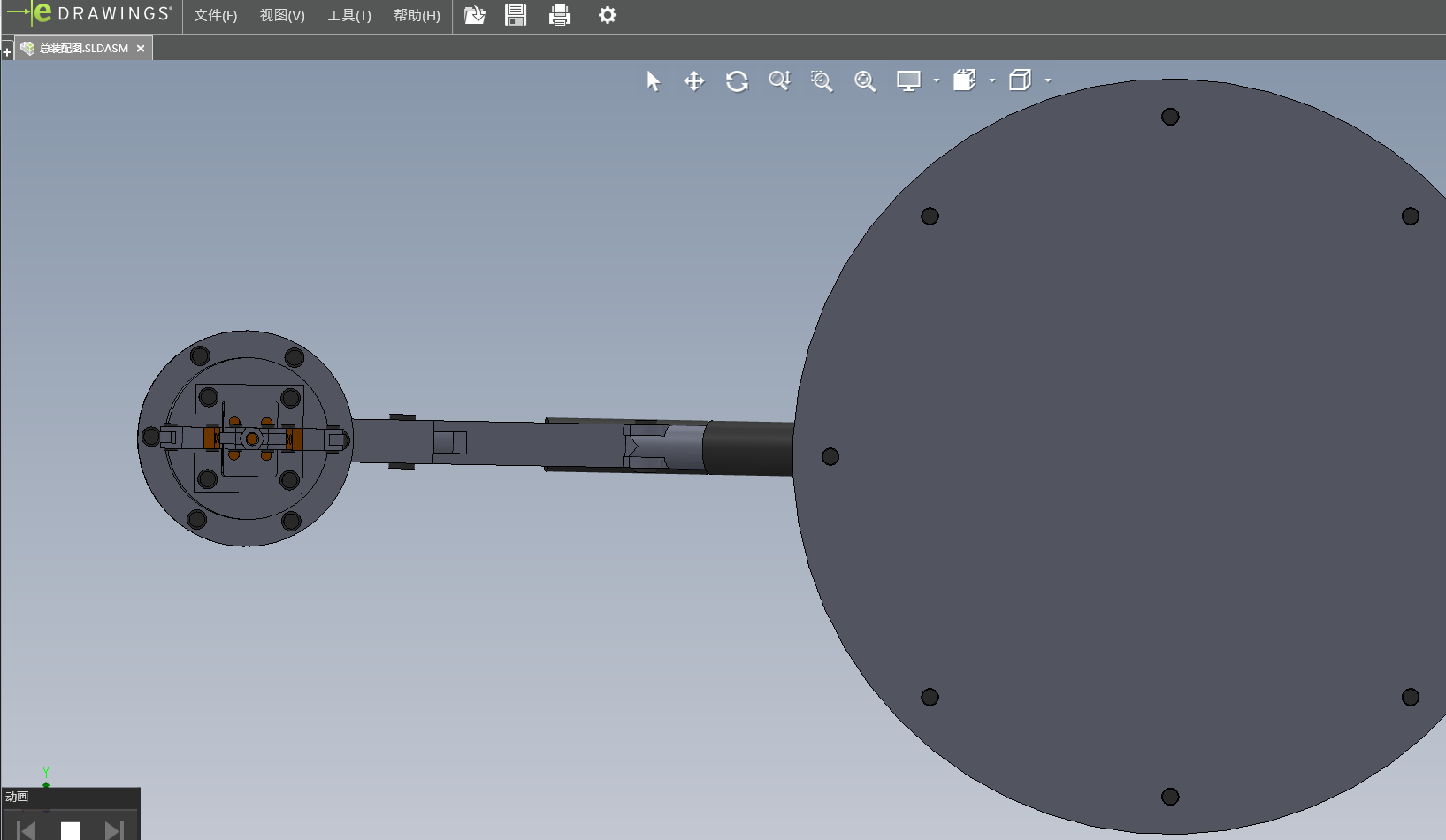
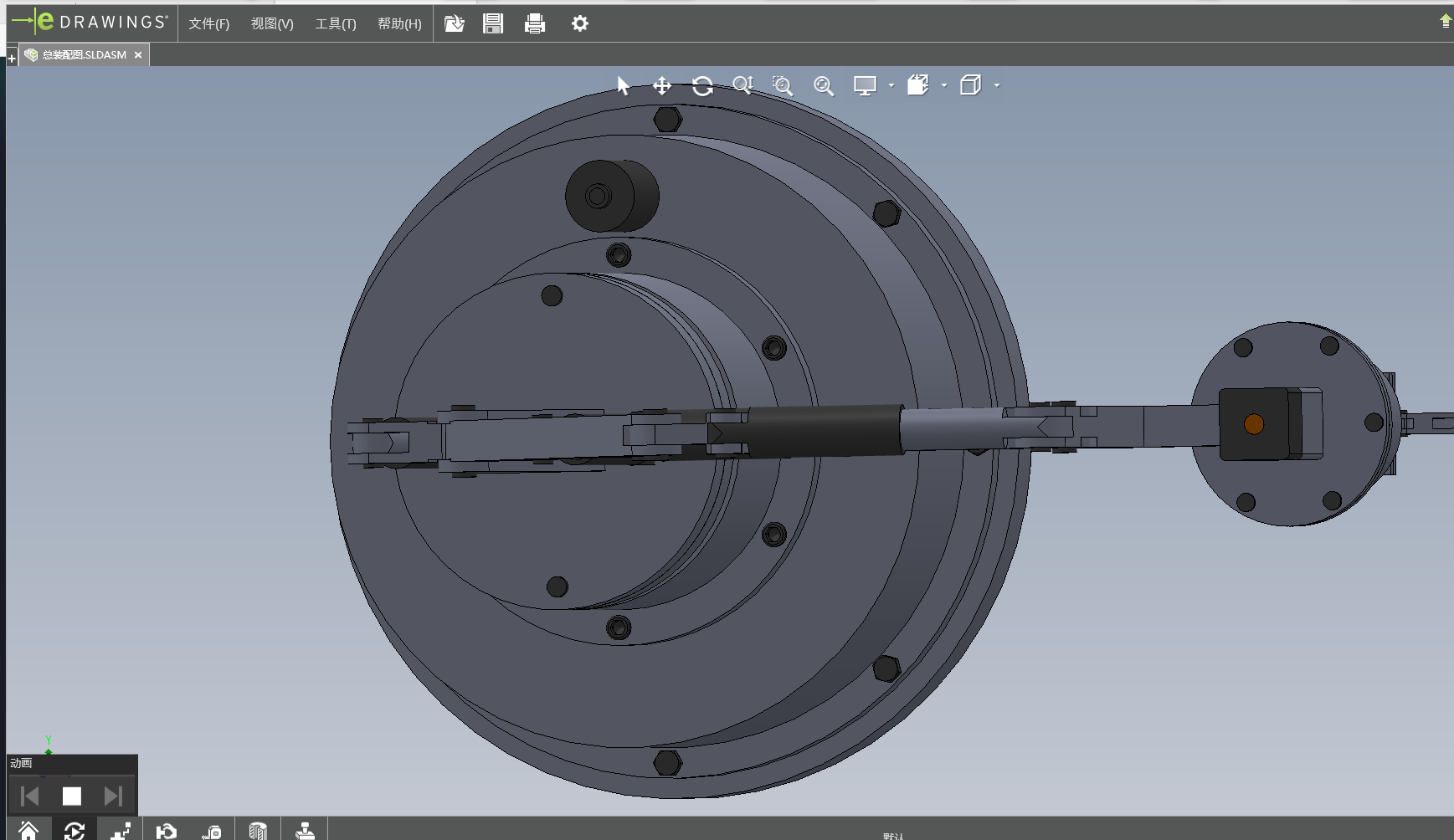
本文旨在设计一款气动驱动的自动取料机械手,以模仿人手和臂部的动作功能,实现按固定程序抓取、搬运或操作工具。机械手的设计首先考虑了整体方案及机械结构,确保其在满足抓取25kg重物、工件直径不超过100mm的条件下,具有高效、稳定的工作性能。关键零部件的强度、刚度及稳定性经过严格的校核,以保证机械手在工作过程中的安全可靠性。利用三维软件,本文完成了机械手的详细三维建模,并通过工程图绘制,清晰地展示了各零件及装配结构。
机械手的动作范围设计充分考虑了实际操作的灵活性,包括腕部顺逆各180度的回转、15-60度的转动,以及臂部上仰60度、下仰30度和220度的回转。这些设计使得机械手能够适应多种工作场景,提高生产效率。本文的研究不仅为自动取料机械手的设计提供了参考,也为相关领域的技术发展贡献了力量。
关键词:自动取料机械手;气动驱动;机械结构设计;强度校核;三维建模
Abstract
This paper aims to design a pneumatic driven automatic feeding manipulator to imitate the action function of the hand and arm, and realize the grasping, handling or operation tools according to fixed procedures. The design of the manipulator first considers the overall scheme and mechanical structure, to ensure that it has efficient and stable working performance under the condition of grasping 25kg of heavy objects and the diameter of the workpiece not more than 100mm. The strength, stiffness and stability of the key parts are strictly checked to ensure the safety and reliability of the manipulator in the working process. Using the 3 D software, this paper completed the detailed 3 D modeling of the manipulator, and through the engineering drawing.
The range of movement of the manipulator is designed to fully consider the flexibility of actual operation, including 180 degrees of the wrist, 15-60 degrees, and the arm of 60 degrees, 30 degrees and 220 degrees. These designs allow the manipulator to adapt to a variety of work scenarios and improve production efficiency. The research in this paper not only provides a reference for the design of automatic material picking manipulator, but also contributes to the technical development in related fields.
Key words: automatic feeding manipulator; pneumatic drive; mechanical structure design; strength check; 3 D modeling
目 录
摘 要
Abstract
第1章 绪论
1.1 选题背景
1.2 设计目的
1.3 国内外研究现状和趋势
1.4 设计原则
第2章 设计方案的论证
2.1机械手的总体设计
2.1.1 机械手总体结构的类型
2.1.2 设计具体采用方案
2.2 机械手腰座结构的设计
2.2.1 机械手腰座结构的设计要求
2.2.2 设计具体采用方案
2.3 机械手手臂的结构设计
2.3.1 机械手手臂的设计要求
2.3.2 设计具体采用方案
2-4 臂部结构示意图
2.4 机械手腕部的结构设计
2.4.1 机器人手腕结构的设计要求
2.4.2设计具体采用方案
2.5机械手末端执行器(手爪)的结构设计
2.5.1机械手末端执行器的设计要求
2.5.2机器人夹持器的运动和驱动方式
2.5.3 机器人夹持器的典型结构
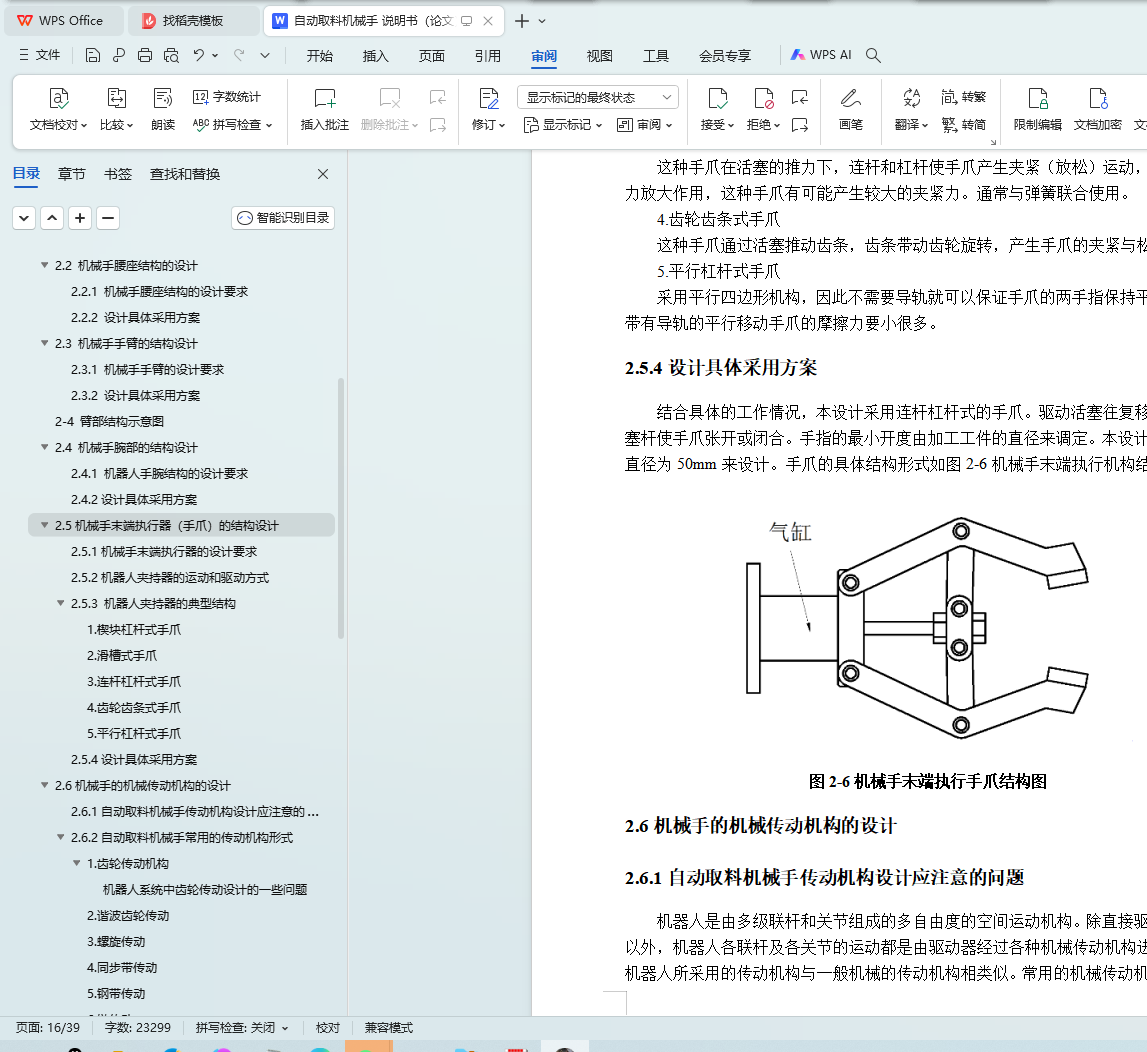
2.5.4设计具体采用方案
2.6机械手的机械传动机构的设计
2.6.1自动取料机械手传动机构设计应注意的问题
2.6.2自动取料机械手常用的传动机构形式
2.6.3 设计具体采用方案
2.7机械手驱动系统的设计
2.7.1机器人各类驱动系统的特点
2.7.2自动取料机械手驱动系统的选择原则
2.7.3机器人液压驱动系统
2.7.4 机器人气动驱动系统
2.7.5机器人电动驱动系统
2.7.6设计具体采用方案
2.8 机器人手臂的平衡机构设计
2.8.1机器人平衡机构的形式
2.8.2设计具体采用的方案
第3章 理论分析和设计计算
3.1液压传动系统设计计算
3.1.1确定液压系统基本方案
3.1.2确定液压系统的主要参数
3.1.3计算和选择液压元件
3.2 电机选型有关参数计算
3.2.1有关参数的计算
3.2.2电机型号的选择
结 论
参考文献
致 谢