摘 要
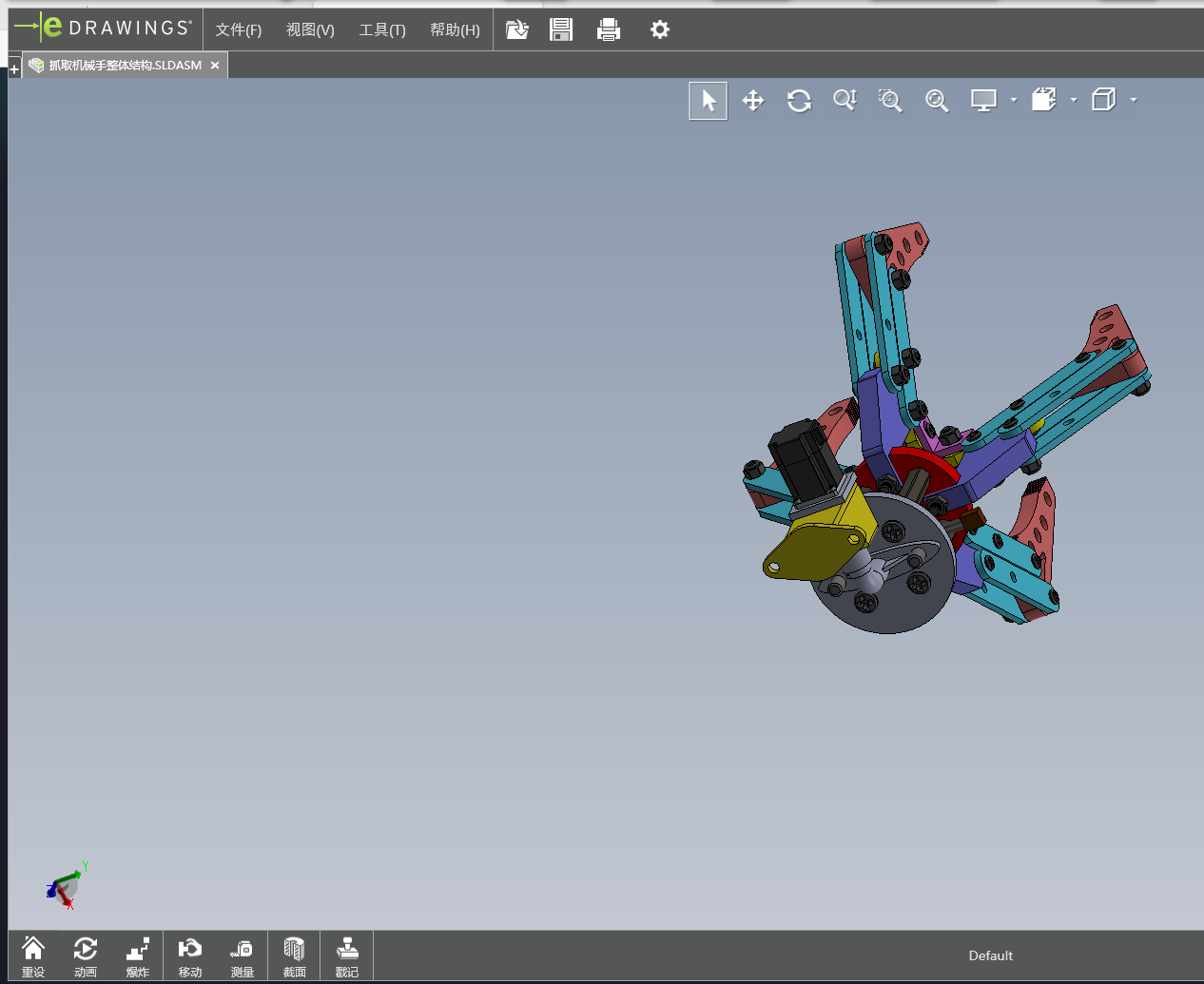
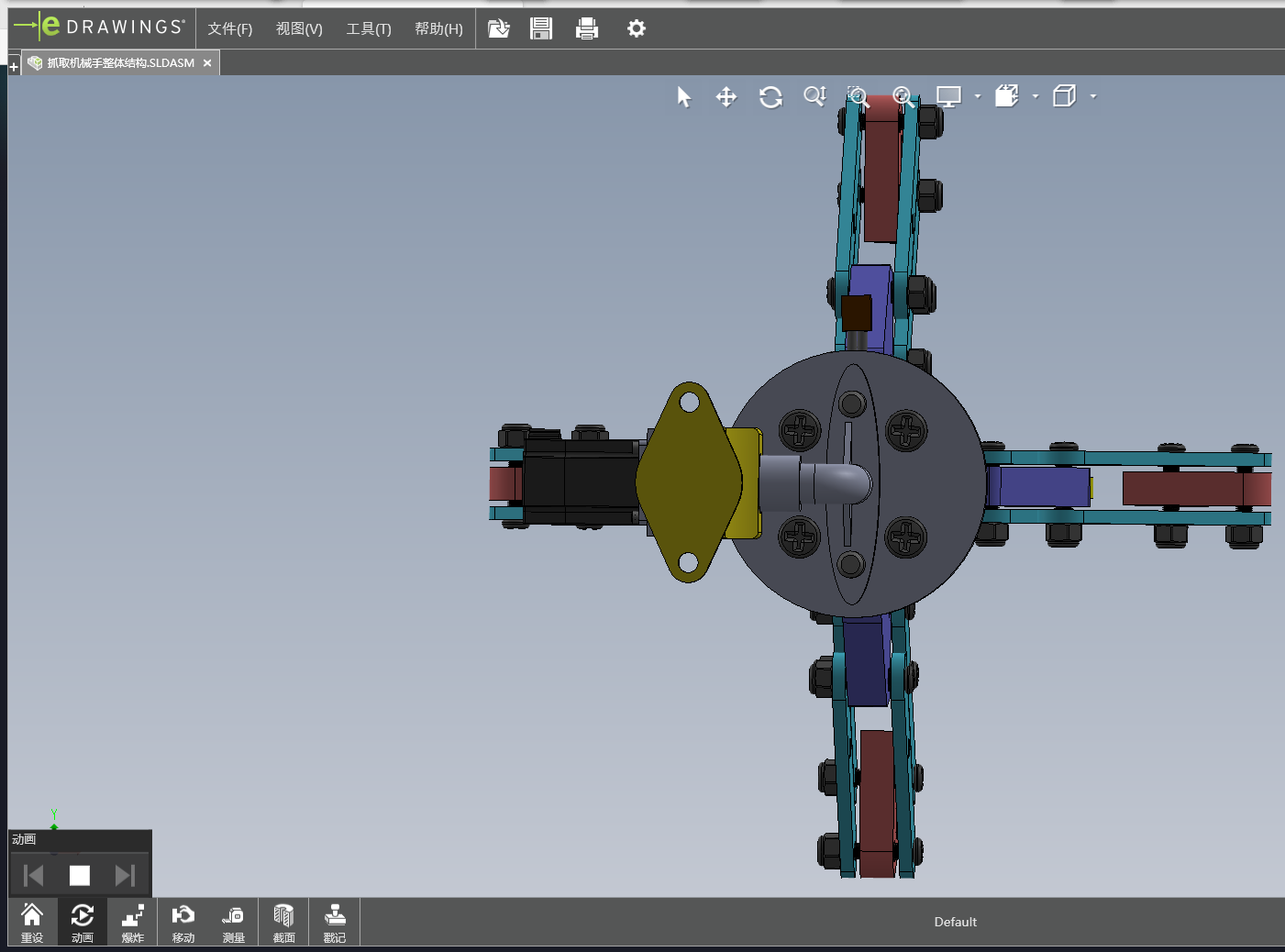
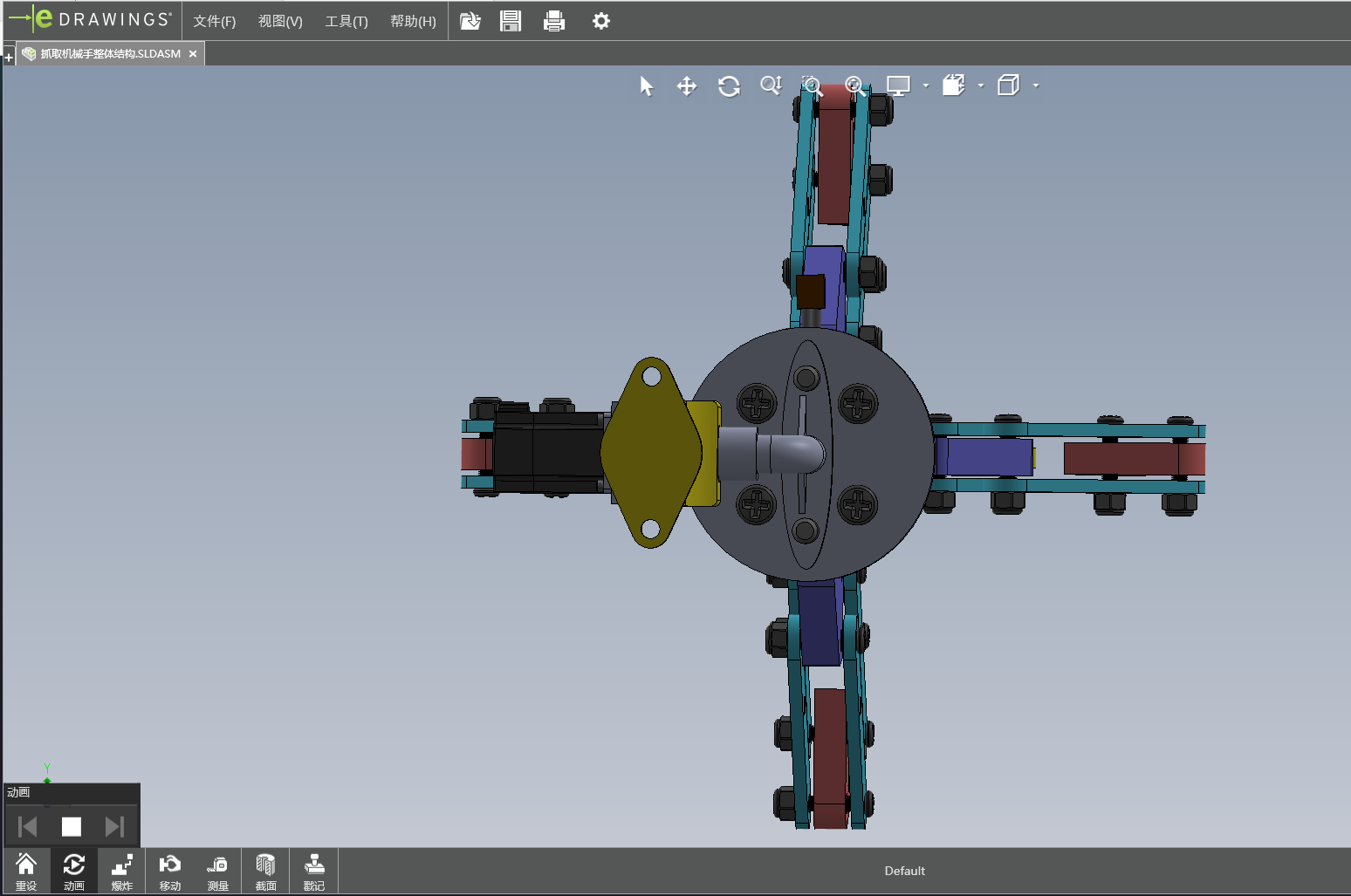
本文探讨了多爪抓取机械手的结构设计,旨在实现对不规则表面物体的高效、可靠抓取。研究内容主要包括机械手的工作原理、驱动方式、夹持传动结构形式以及四爪夹持原理的选择。通过深入分析和比较,本文提出了一种结构简单、制造成本合理、稳定性良好的多爪抓取机械手设计方案。该方案以曲轴抓取为优先考虑,采用机械系统实现对不规则表面的抓取,并结合智能化控制的机械传动系统,以满足不同工作环境下的需求。
机械手的设计包括执行控制系统、机械臂结构系统、驱动系统、控制系统和检测系统等多个部分。执行控制系统是整个机械传动的基础,通过控制系统实现机械手的夹持和抓取命令。机械臂结构系统的设计决定了机械手的搬运能力,本文重点探讨了传动形式和传动范围的选择。在驱动系统方面,本文采用了电动机和步进电机驱动的方式,以提供稳定、可靠的驱动力。控制系统则根据系统的工作要求,通过控制器实现对机械手运动的精确控制。检测系统则用于检测物体的大小和位置,确保抓取过程的准确性和可靠性。
关键词:多爪抓取机械手;结构设计;驱动方式;夹持传动;SolidWorks三维图
Abstract
This paper explores the structural design of the multi-claw grasping manipulator, aiming to achieve efficient and reliable grasping of irregular surface objects. The research content mainly includes the working principle of the manipulator, the driving mode, the clamp transmission structure form and the choice of the four-claw grip principle. Through thorough analysis and comparison, this paper proposes a multi-claw grasping manipulator design scheme with simple structure, reasonable manufacturing cost and good stability. This scheme takes the crankshaft grasp as the priority, using the mechanical system to realize the grasp of the irregular surface, and combined with the intelligent control of the mechanical transmission system, to meet the needs of different working environment.
The design of the manipulator includes the execution control system, the manipulator structure system, the drive system, the control system and the detection system. The executive control system is the basis of the whole mechanical transmission, through the control system to hold and grasp the manipulator command. The design of the mechanical arm structure system determines the handling ability of the manipulator. This paper focuses on the choice of transmission form and transmission range. In terms of driving system, this paper adopts electric motor and stepper motor driving mode to provide stable and reliable driving force. The control system is according to the work requirements of the system, through the controller to achieve the precise control of the manipulator movement. The detection system is used to detect the size and position of objects to ensure the accuracy and reliability of the grasping process.
Key words: multi-claw grasping manipulator; structure design; drive mode; clamp drive; SolidWorks 3 D diagram
目 录
第一章 绪论
1.1 课题研究的意义及背景
1.2 机械手研究概况
1.2.1国外研究现状
1.2.2国内研究现状
1.3 研究的内容
第二章 多爪抓取机械手总体结构设计
2.1机械手设计思路
2.2总体方案的设计
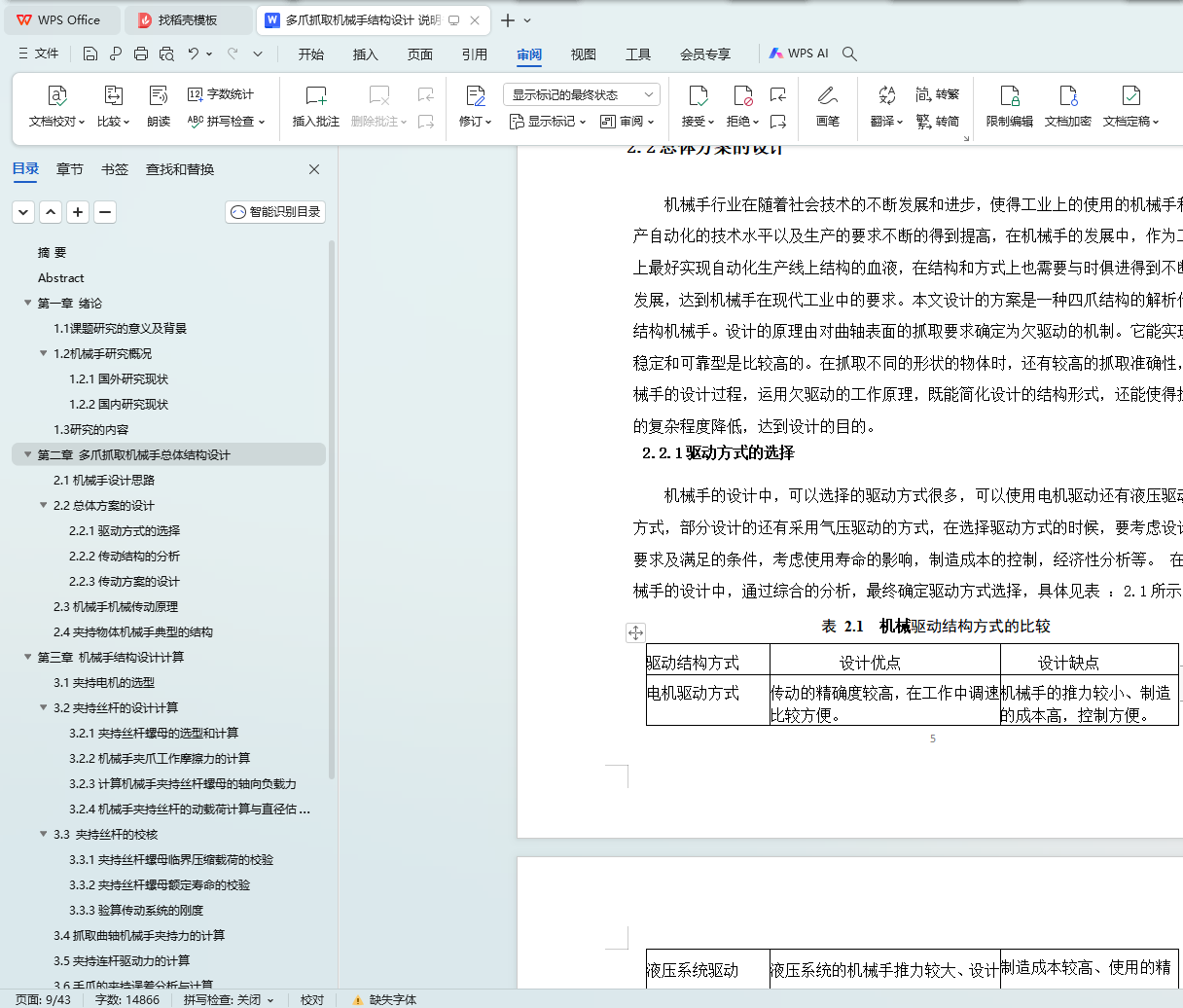
2.2.1驱动方式的选择
2.2.2传动结构的分析
2.2.3传动方案的设计
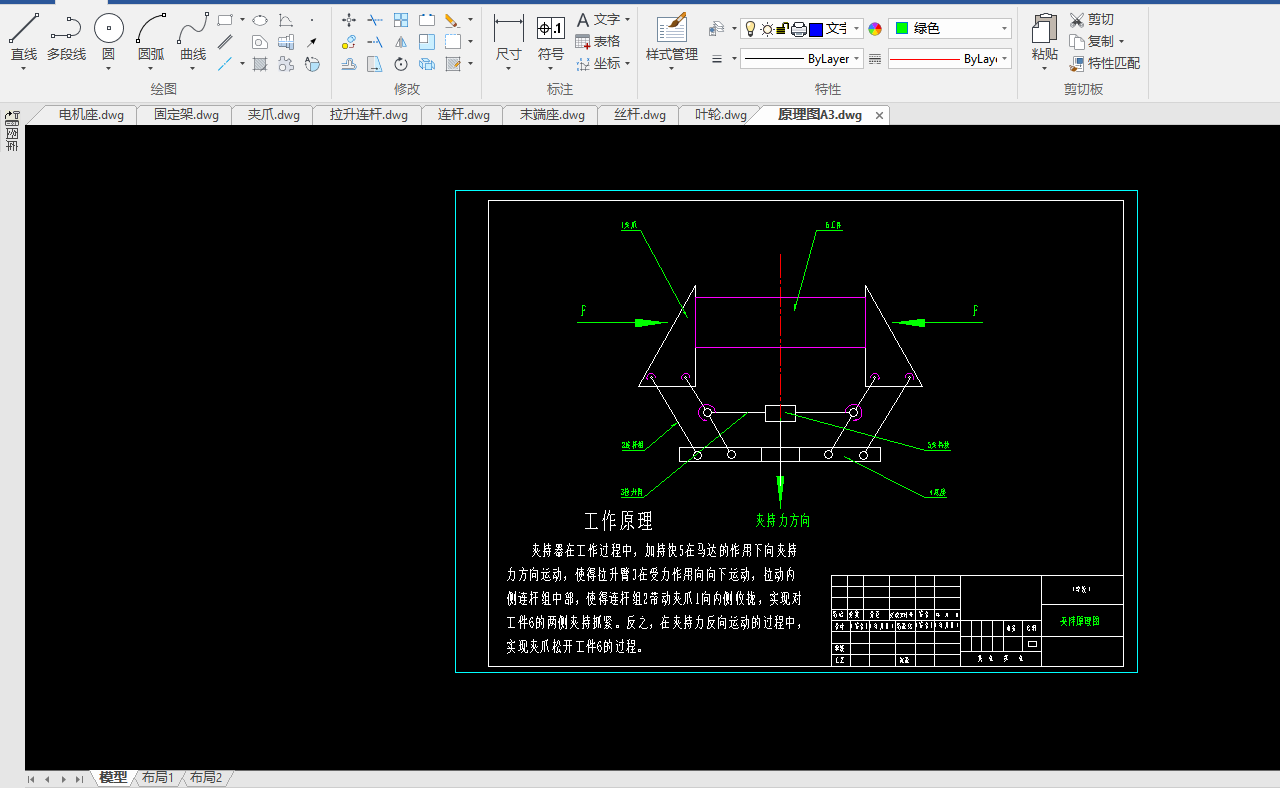
2.3机械手机械传动原理
2.4夹持物体机械手典型的结构
第三章 机械手结构设计计算
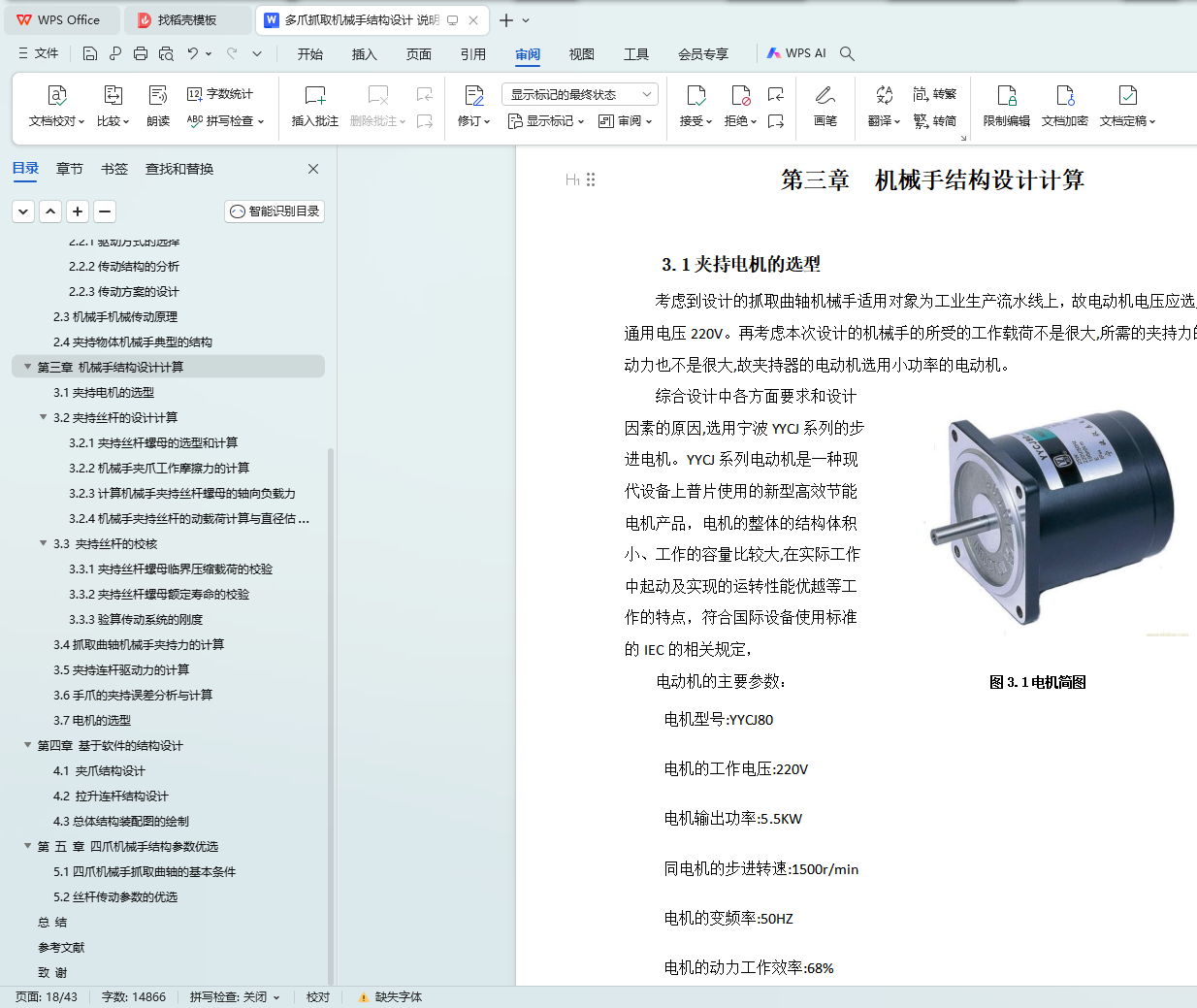
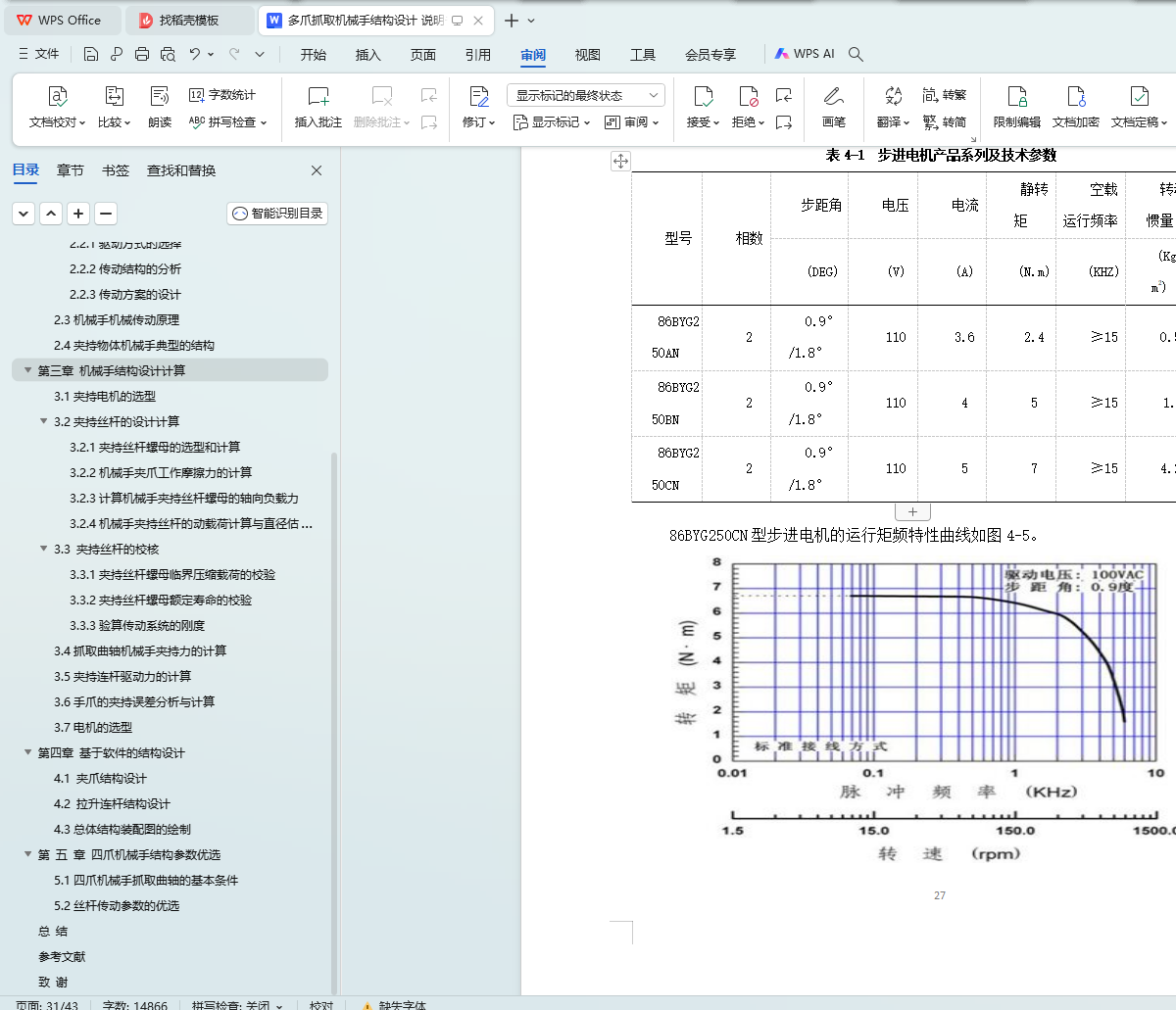
3.1夹持电机的选型
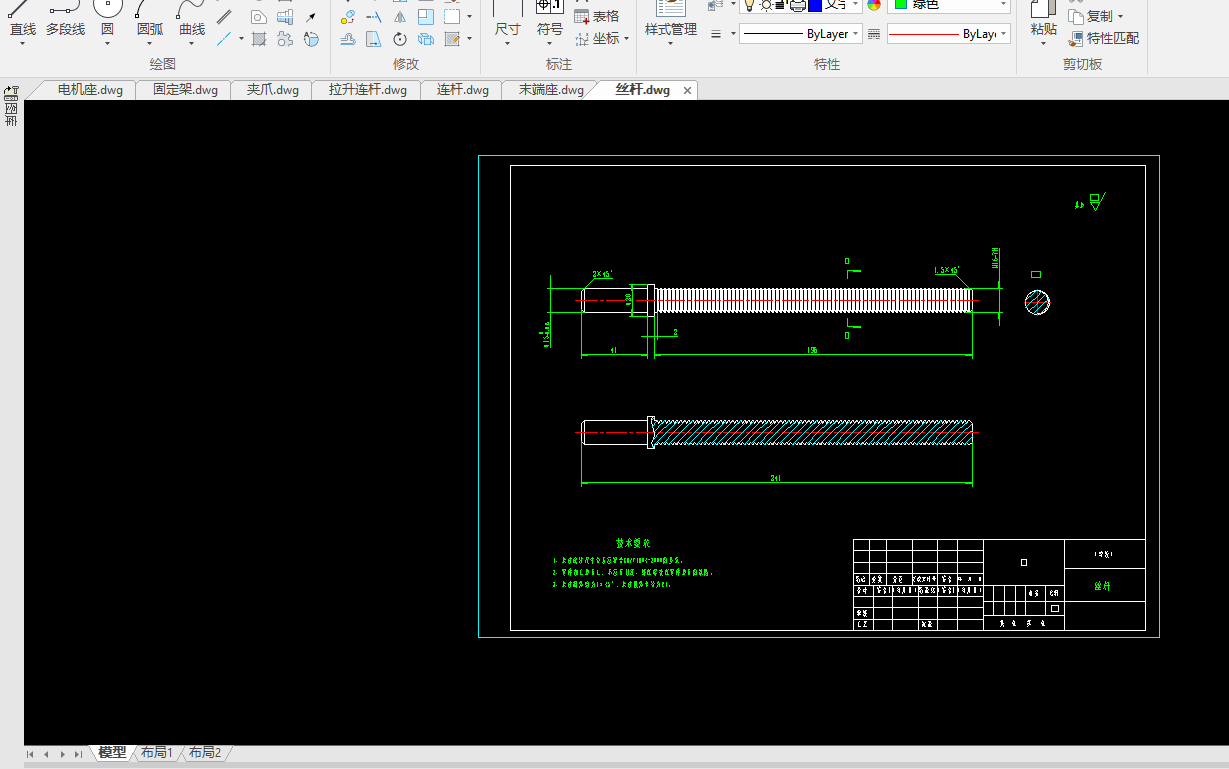
3.2夹持丝杆的设计计算
3.2.1夹持丝杆螺母的选型和计算
3.2.2机械手夹爪工作摩擦力的计算
3.2.3计算机械手夹持丝杆螺母的轴向负载力
3.2.4机械手夹持丝杆的动载荷计算与直径估算
3.3 夹持丝杆的校核
3.3.1夹持丝杆螺母临界压缩载荷的校验
3.3.2夹持丝杆螺母额定寿命的校验
3.3.3验算传动系统的刚度
3.4抓取曲轴机械手夹持力的计算
3.5夹持连杆驱动力的计算
3.6手爪的夹持误差分析与计算
3.7电机的选型
第四章 基于软件的结构设计
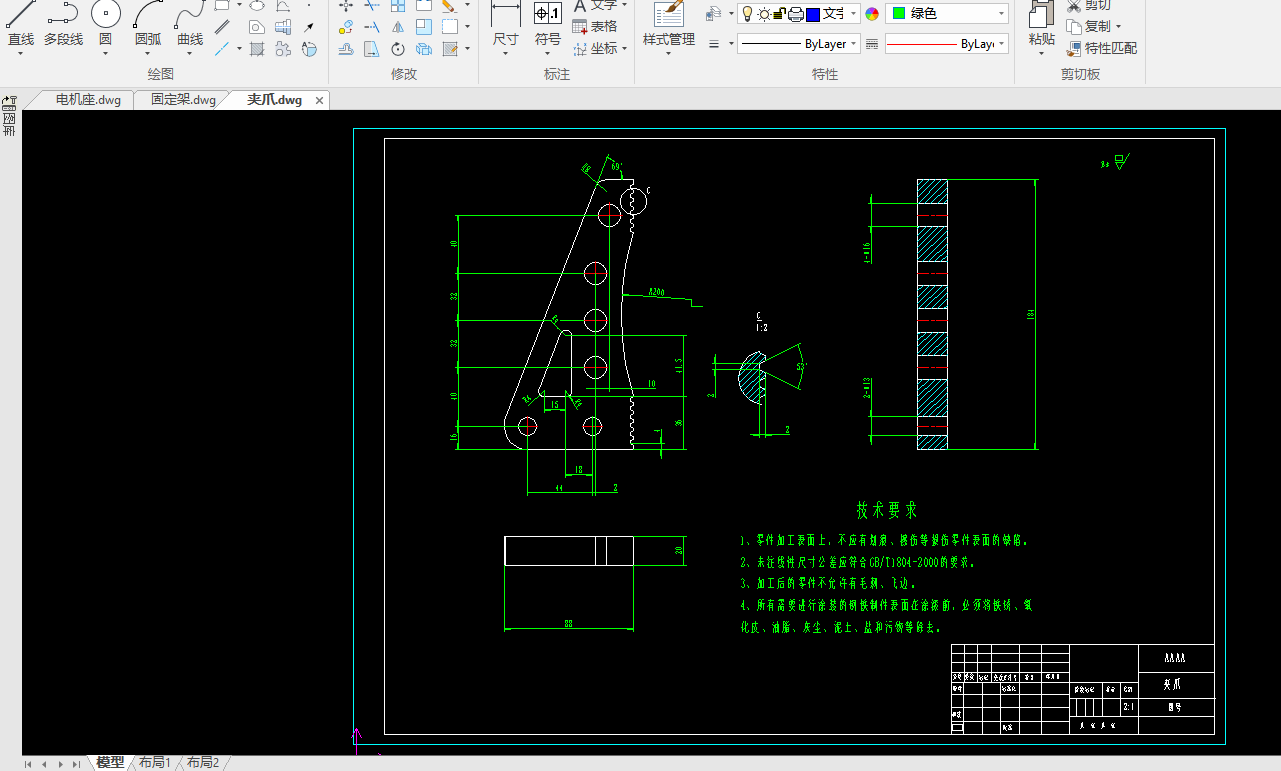
4.1 夹爪结构设计
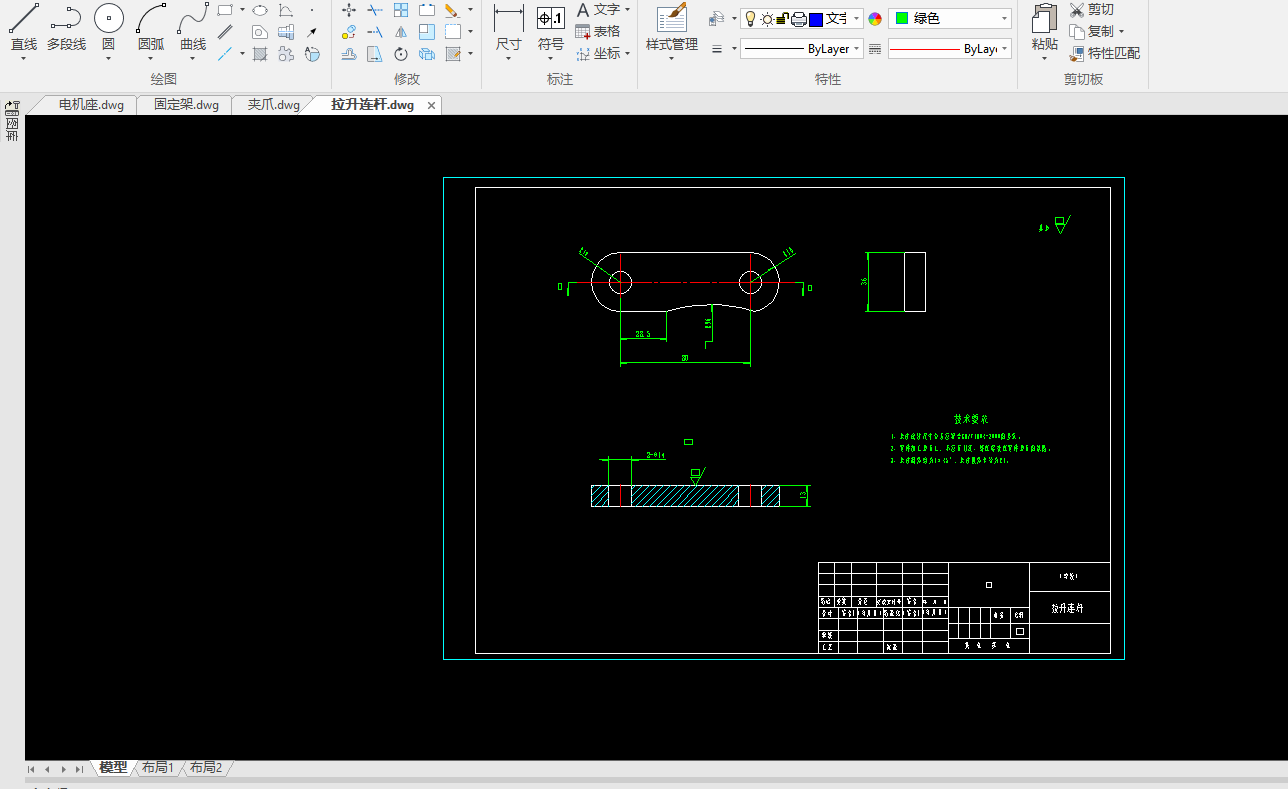
4.2 拉升连杆结构设计
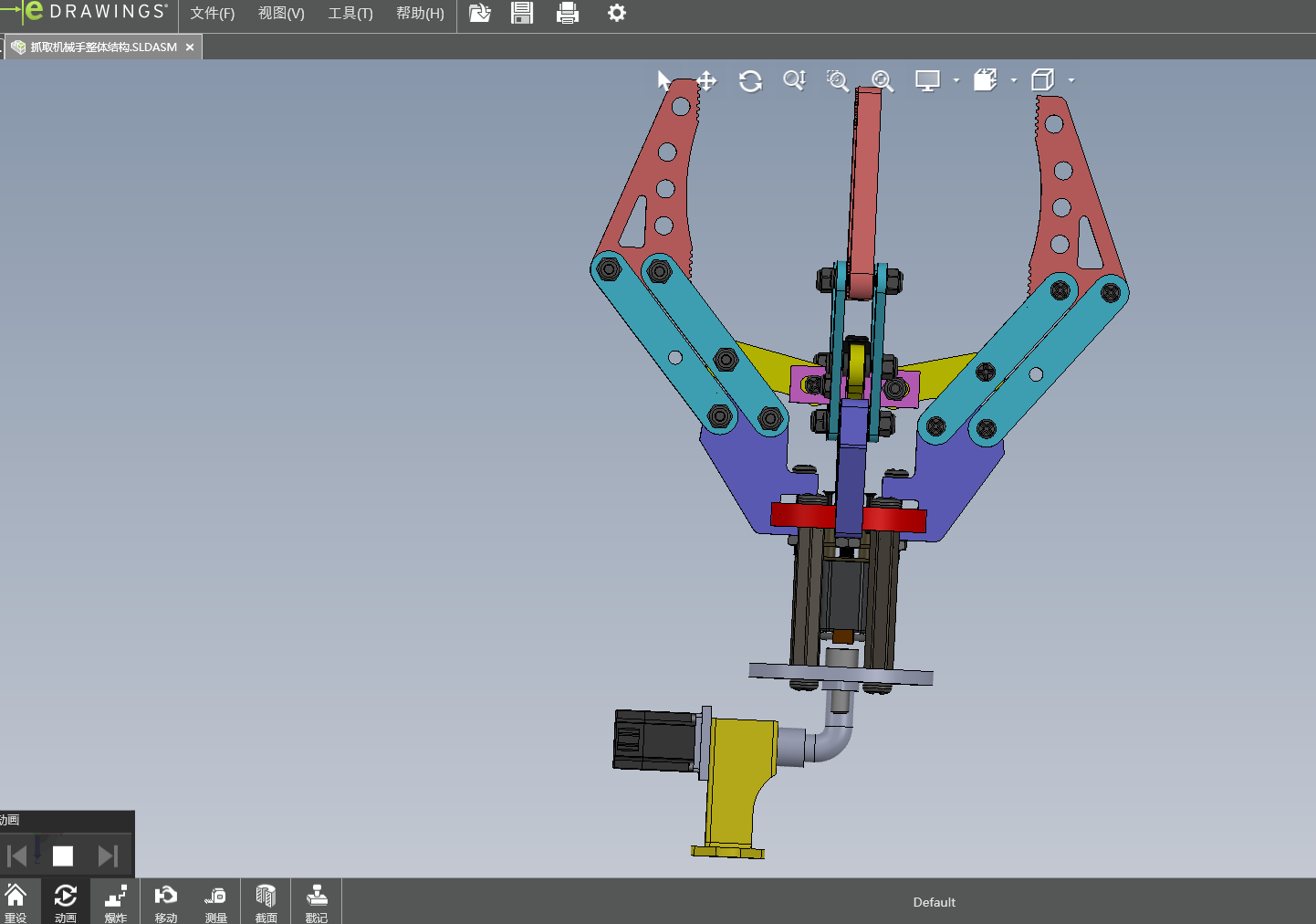
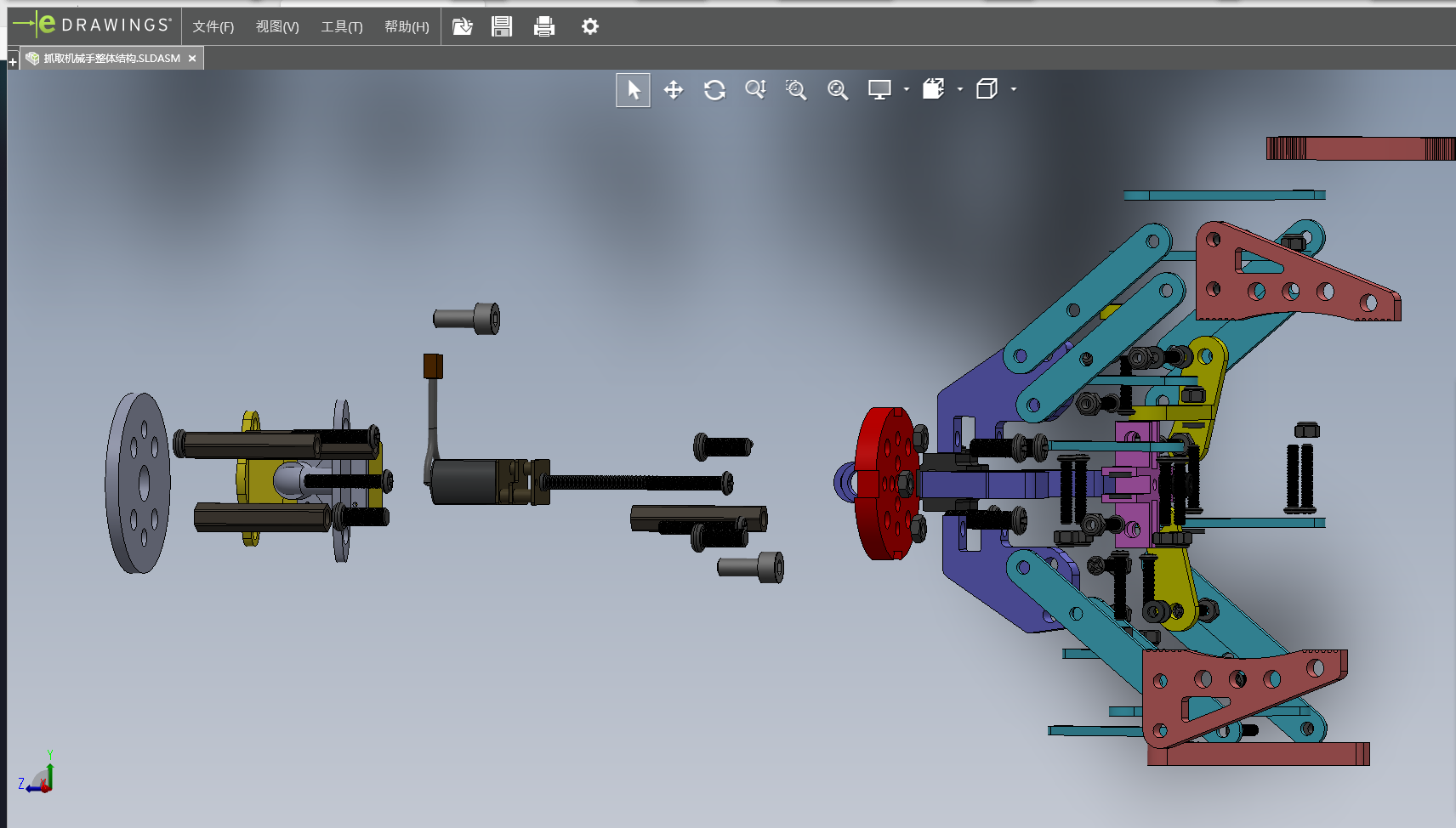
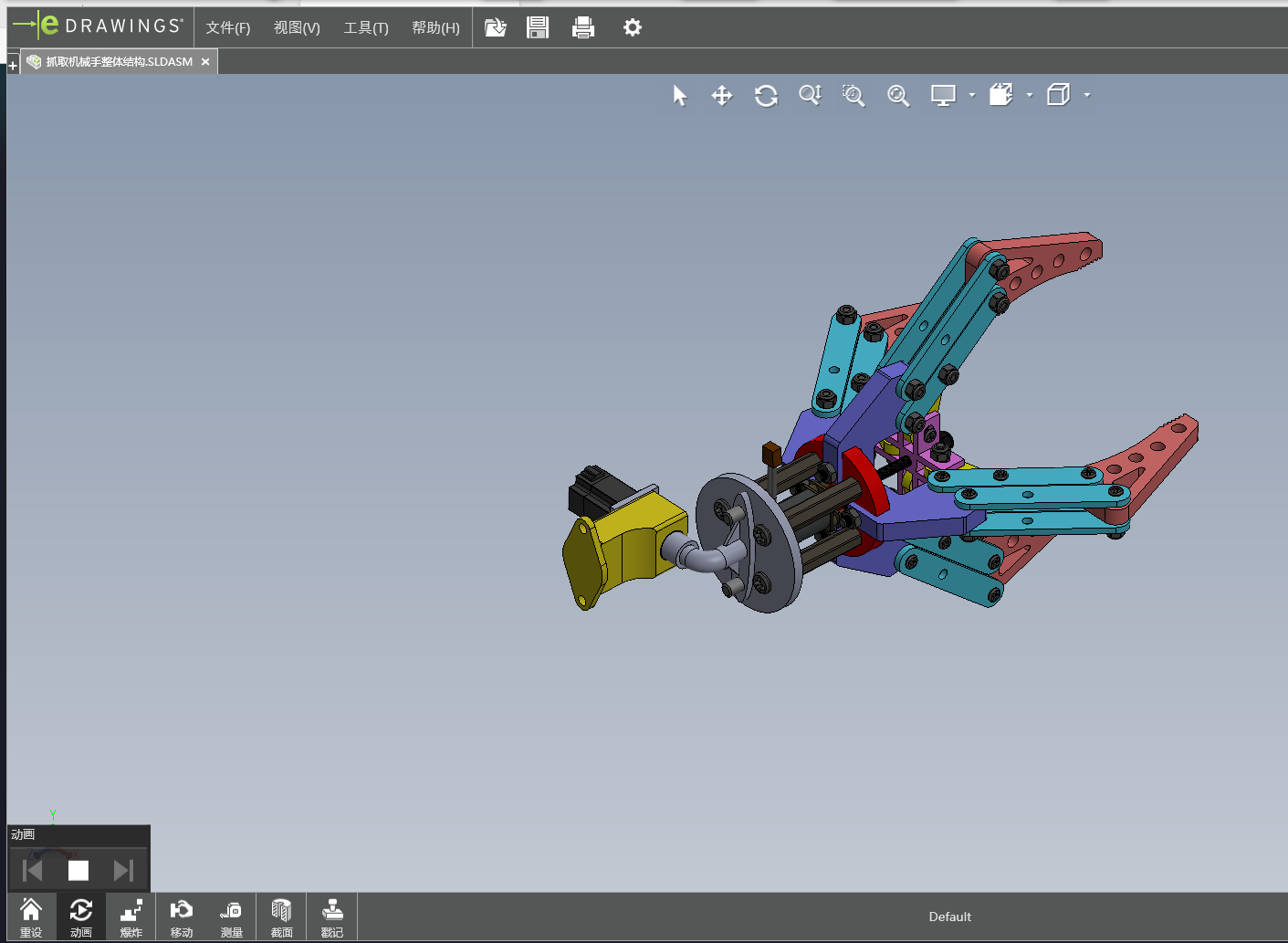
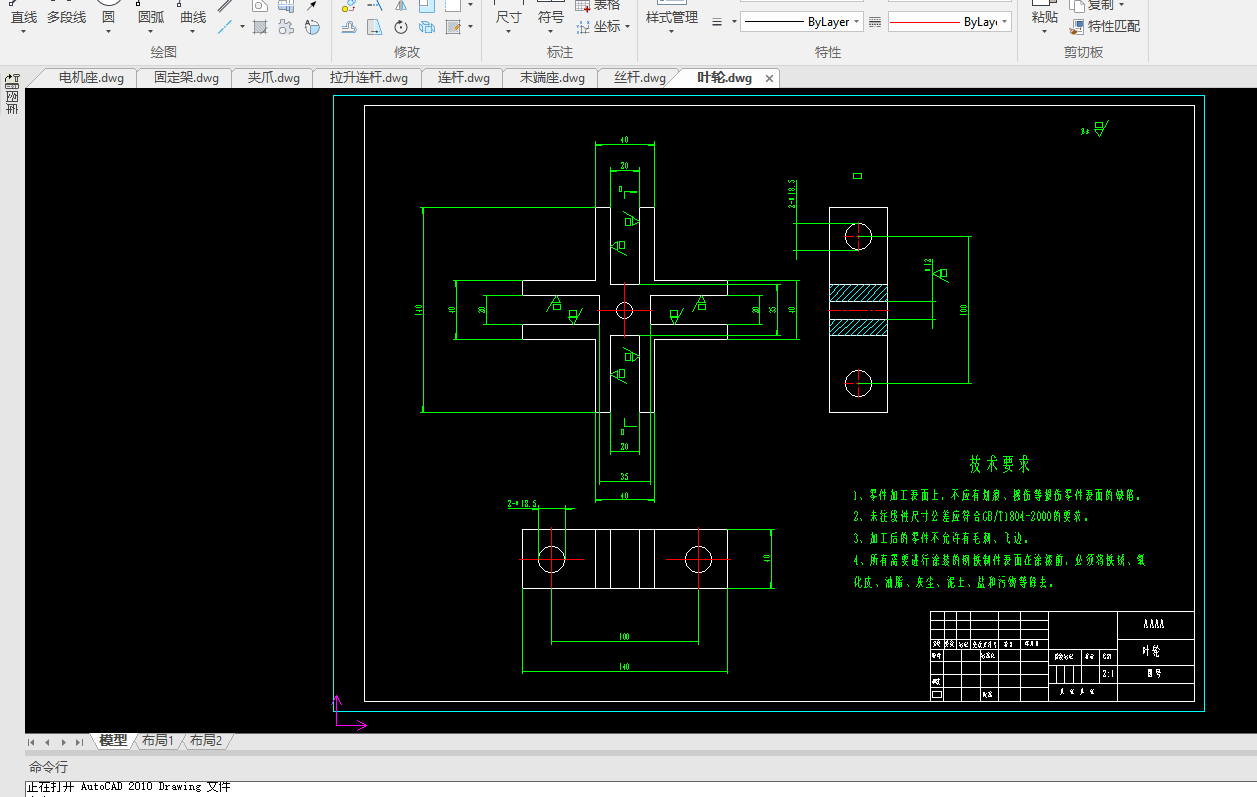
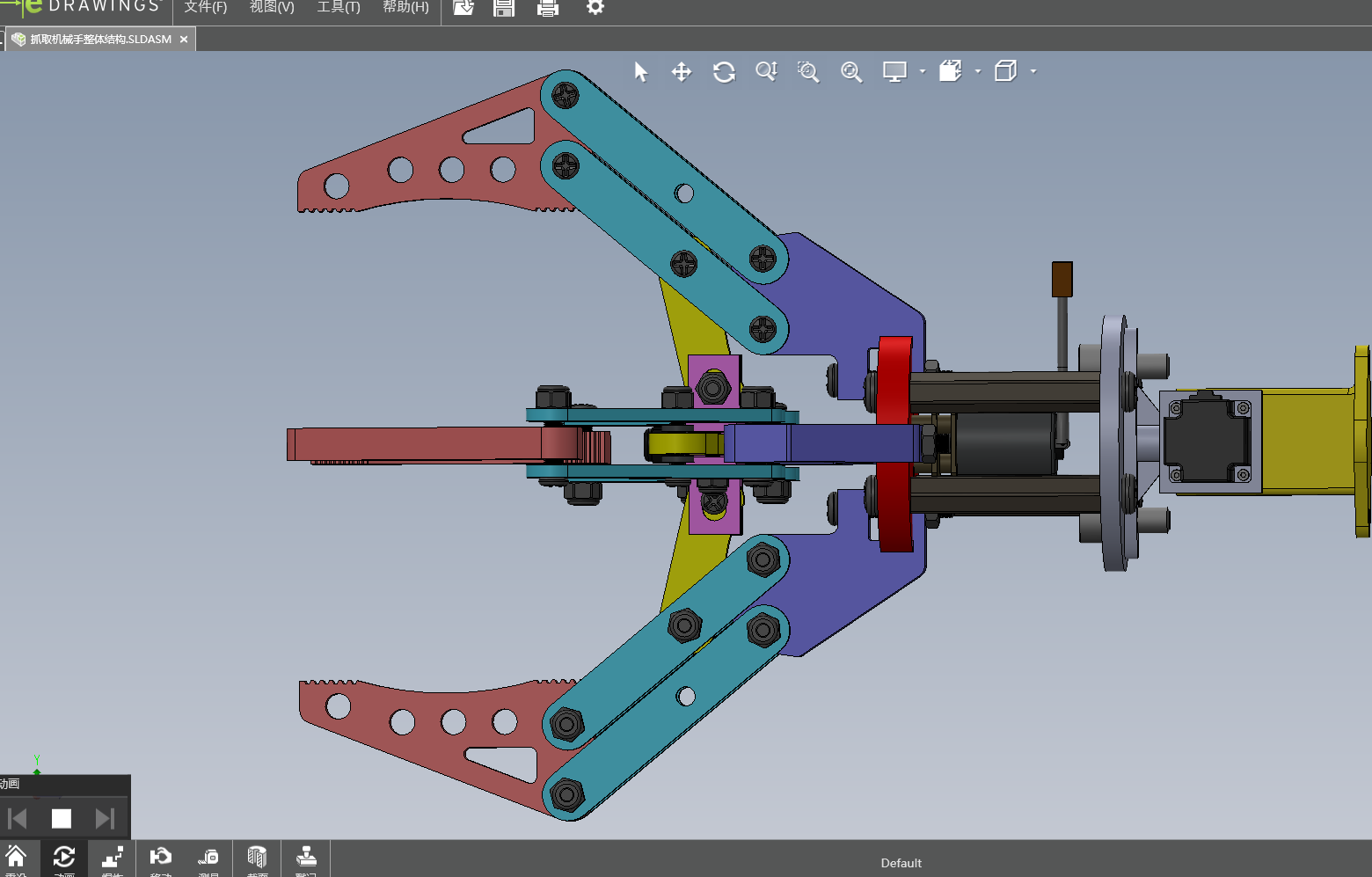
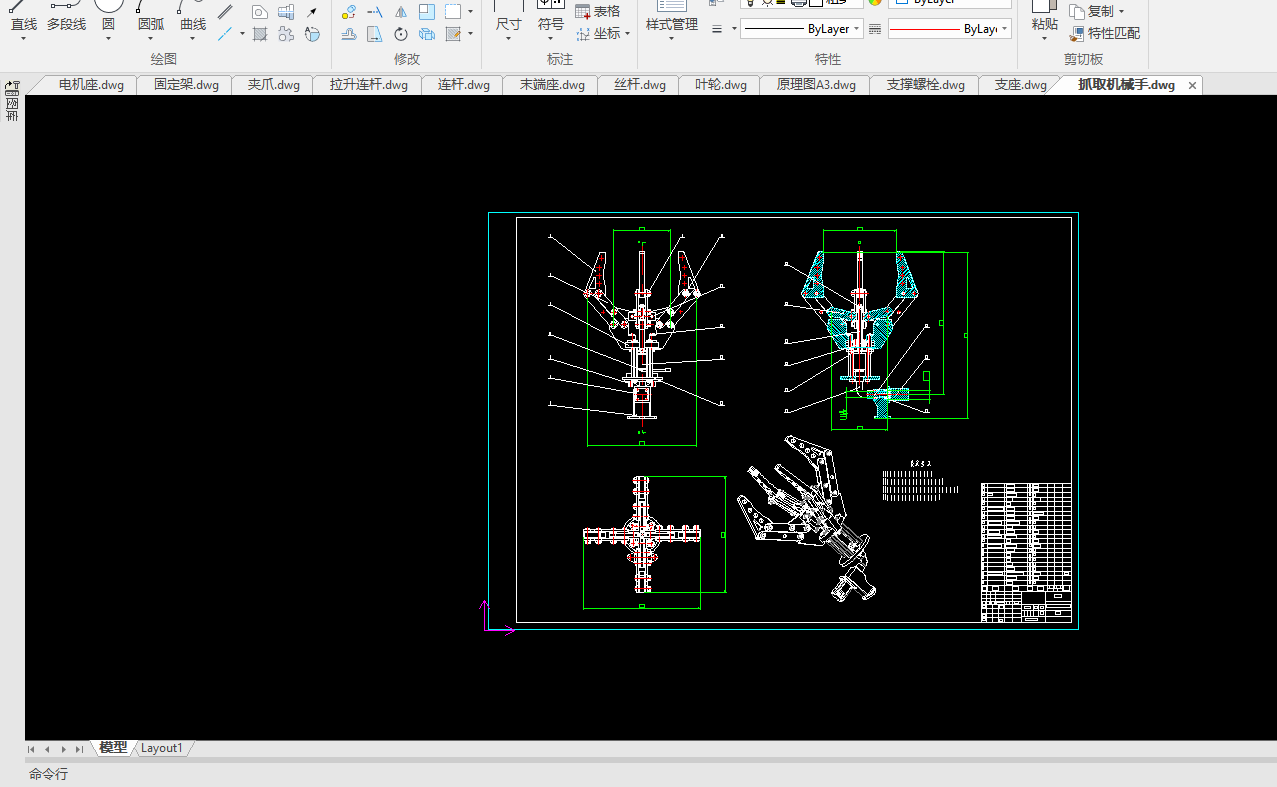
4.3总体结构装配图的绘制
第 五 章 四爪机械手结构参数优选
5.1四爪机械手抓取曲轴的基本条件
5.2丝杆传动参数的优选
总 结
参考文献
致 谢