|
二、主要研究(设计)内容、研究(设计)思想及工作方法或工作流程
(一)设计内容
我国农业正在向精细化、智能化、集约化的方向转变,将精准农业技术引入农业实践中,从而推进现代农业发展方式转变和结构调整。精准农业是一种革命性的农业发展模式,借助先进的技术手段,包括传感器、无人机、卫星导航等,为农民提供精准的农事管理和决策支持。精准农业可以实现精确施肥、精确浇水、精确施药等,减少资源浪费并提高作物产量和质量。它具有较大的经济和环境效益,在推动农业可持续发展方面具有重要意义。其中“农业精准作业与信息化”作为农业现代化发展的重点领域,卫星导航系统和高分卫星遥感系统作为空间信息基础设施,是精准农业的重要技术支撑,是发展现代农业和实现农业可持续发展的关键技术。
本设计是根据北斗导航卫星系统进行研究,结合了嵌入式软件及硬件开发、自动驾驶控制技术等智能化技术。主要设计包括以下几个部分。
以树莓派为核心,利用北斗卫星导航系统在LCD显示屏幕显示地图,对农机工作路线在地图上进行规划。然后通过微型计算机下达指令到动力驱动模块,控制农机开始工作。北斗卫星导航系统对农机进行位置信息接收,通过接收到的位置信息,由微型计算机对信息进行处理,检查农机是否在规划的路线行进。如果没有,则通过微型计算机向控制系统发出指令,由角度传感器模块调整农机车轮运动方向,使其运动轨迹与规划路线一致;除此之外,在排种装置中利用光电传感器,通过种子不断的下降遮断光束,使光电转换装置输出电脉冲信号,判断种子是否进入播种机;如果持续一段时间不在有信号传输,则通过报警系统向微型计算机发出信号,在LCD和APP上显示报警信息。
(二)设计思想
(1)文献分析法:文献分析法是指收集、分析、研究统计资料和报道资料而获得情报信息的一种方法。本文主要通过收集大量的文献资料对国内外的研者学者与本次研究关联的研究成果进行比较梳理,学习总结有关研究的核心思想和观点,以完成自己的设计。
(2)归纳总结法:总结归纳法是一种由个别到一般的论证方法。它通过许多个别的事例或分论点,然后归纳出它们所共有的特性,从而得出一个一般性的结论。
(3)案例分析法:对与研究相关的具有的代表性的具体案例进行周密而仔细的学习研究而获得对相关研究的总体认识,理解作者的核心思想,理解研究成果的整体结构,学习经验,在自己进行研究时能够借鉴以少走弯路。
(4)比较分析法:是依据客观事物间的相互联系和发展变化,通过同一数据的不同比较,借以对一定项目作出评价的方法。对不同文献的研究内容进行比较分析,以达到深入理 解文献核心思想的目的。在硬件选择方面,对相同功能不同型号的硬件进行比较和分析,总结出它们各自的优缺点,选择硬件时更好的符合研究需求。
(三)工作流程
第一步:对设计题目进行研究分析,提出研究目的和研究意义。对各大卫星导航系统和自动化播种机的国内外研究现状,以及相关的实际应用进行了阐述。其次,对北斗导航系统进行了相关介绍,对北斗接收机定位解算算法进行了阐述。
第二步:构思系统总体设计,本系统主要采用以树莓派微型计算机为控制核心,结合北斗卫星定位技术、嵌入式软件及硬件开发、自动驾驶控制技术等智能化技术进行研究开发工作。利用这些技术让系统实现所需功能:
(1)播种线路的制定:在LCD屏幕上显示地图,并且可以在地图上规划车机行进路线。
(2)线路的导航:向车机发送指令,调整车轮,使车机行进在规划路线上。
(3)播种机自动播种:播种机自动工作,进行排种。
(4)播种器状况监测:监测种子是否有进入排种装置中
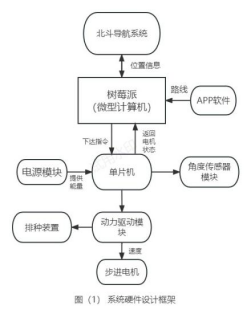
第三步:本系统的硬件设计主要采用模块化结构设计,利用相关关键技术,分别设计北斗卫星导航模块、角度传感器模块,自动播种模块等,再由微型计算机控制并结合各单元模块。其中北斗卫星导航模块利用播种机接收卫星发出的信号,对播种机所处位置进行定位;角度传感器模块利用转向控制装置对车轮进行控制;自动播种模块则控制电机,将种子成功播种至农田。树莓派则将车辆定位点和车轮等信息进行整合,控制车辆行驶在规划路线上。系统硬件设计框架大致由图(1)所示:
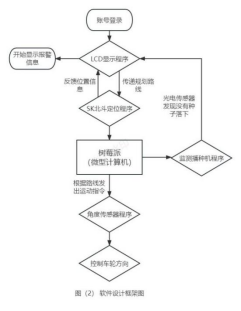
第四步:本系统的软件设计主要采用模块化设计方案,基于嵌入式 Linux 系统而开发,主要分为五大部分,分别是:主程序、北斗定位程序、LCD 显示程序、通信程序、角度传感器程序、监测播种机程序。使用者可以通过账号登录该程序,然后利用LDC所显示的地图,对排种机进行路线规划。并且可以通过该软件,了解播种装置的状态。
(1)主程序:主程序的工作是对系统进行初始化准备工作,并协调组织各模块程序有序执行。
(2)北斗导航定位程序:其作用是在接收到北斗卫星定位模块的定位数据帧后,经过解算来获取经纬度、时间、日期等数据。
(3)LCD 显示程序:可以通过LCD 显示屏对农机作业状态进行监控,实时了解作业面积值、GPRS 连接状态、农机工作位置以及路径、时间以及日期等数据。
(4)通信程序:其主要作用是实现了数据收发功能,通过其发送指令完成对GMS以及GPRS等功能的控制
(5)角度传感器程序:其作用是规划好路线后,等待微处理机传来的指令,根据指令控制车轮方向。
(6)监测播种机程序:利用播种装置中安装的光电传感器,判断是否有种子落下,如果不在有种子落下,则向微处理器发送报警信息。
系统软件设计框架大致由图(2)所示:
第五步:对系统硬件进行配置,利用Altium Designer软件对各个模块的电路进行设计,并进行串口通信。由于条件和设备限制,通过对模拟数据的综合分析,以证明系统的软硬件设计是合理有效的,能实现所要求的农机自动驾驶功能
|
