摘要
基于PLC的倍捻机多电机控制系统由硬件部分和软件部分组成。硬件部分由可编程序控制器、步进驱动器、倍捻机多电机构成。步进驱动器、可编程序控制器、倍捻机多电机需要通过正确的逻辑连接起来。但是还起不到控制的作用,所以需要进行软件部分的设计。软件部分包括程序编制以及程序仿真。将此控制系统应用在导纱杆摇尺中,可以实现导纱杆摇尺工作的自动化。由于控制系统中没有位置检测装置,所以此系统属于开环控制。如果在控制系统中增加位置检测装置组成闭环系统,可以提高纱的加工精度。
关键词 导纱杆摇尺;倍捻机多电机;控制
Abstract
The multi-motor control system based on PLC consists of hardware and software parts. The hardware part is composed of programmable controller, step driver and multiple motor. Step drive, programmable controller, fold twist machine multiple motors need to be connected through the correct logic. But it does not have control yet, so you need to design the software part. The software part includes programming and program simulation. Applying this control system in the bar can be automated. Since there is no position detection device in the control system, this system is an open loop control. If a position detection device is added to the control system to form a closed-loop system, the processing accuracy of the yarn can be improved.
Key words guide yarn rod shake ruler; double twist machine multiple motor; control
目 录
摘要
Abstract
1绪论
1.1本课题研究的内容
1.2控制系统组成器件概述
2 总体方案介绍
2.1导纱杆摇尺控制系统总体方案介绍
2.2导纱杆摇尺的选择
2.3步进电动机的介绍
2.4 PLC的介绍
3 导纱杆摇尺控制系统硬件设计
3.1 控制系统硬件设计
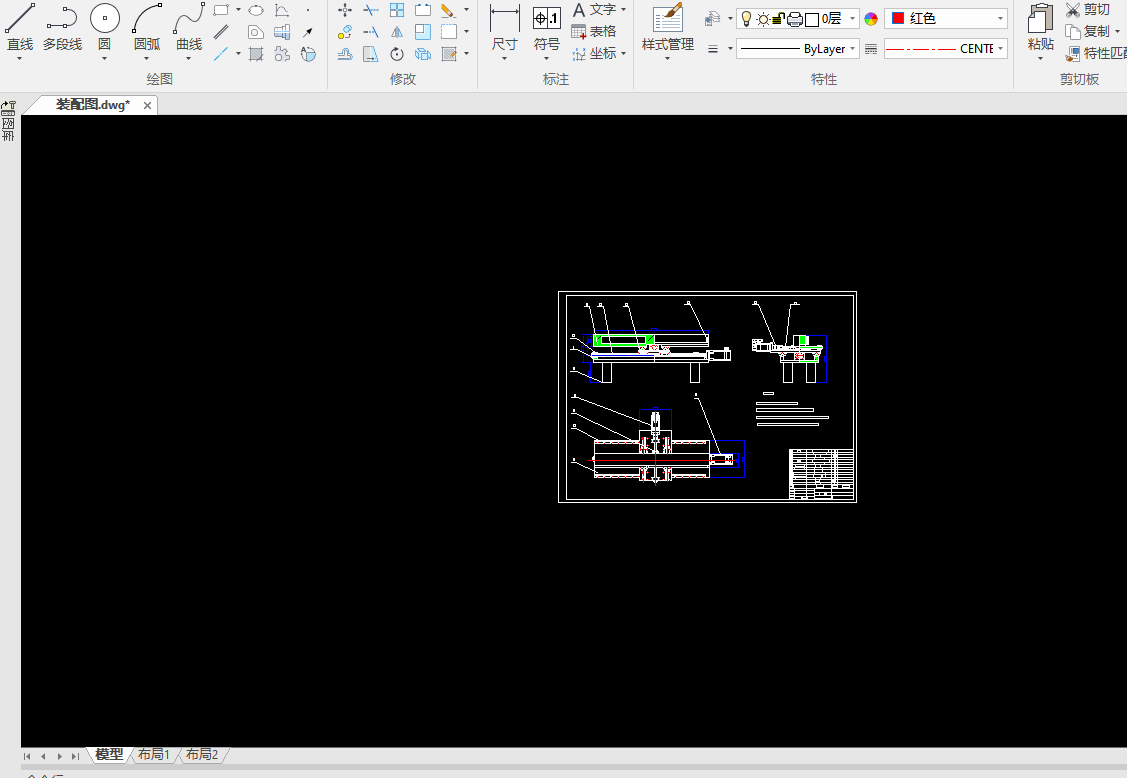
3.1.1导纱杆摇尺控制系统构成图
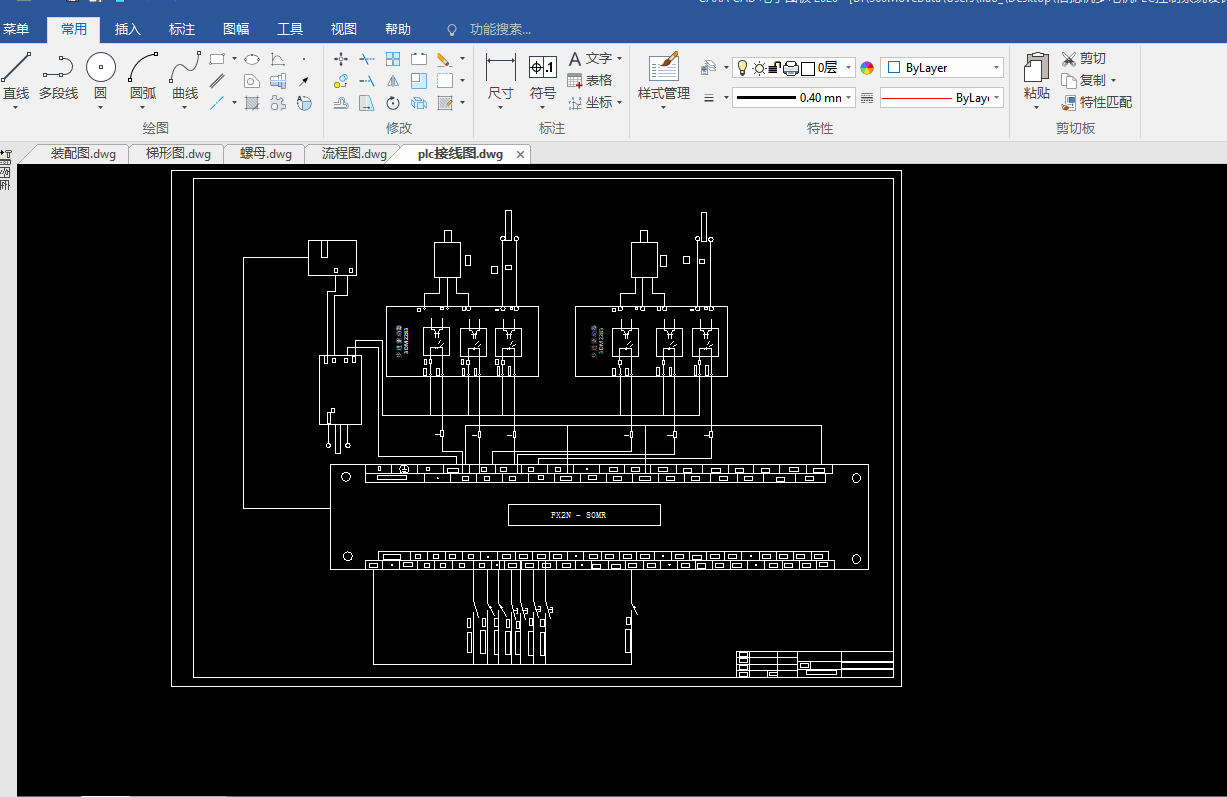
3.1.2导纱杆摇尺控制系统接线简图
3.2 控制系统元器件的选型
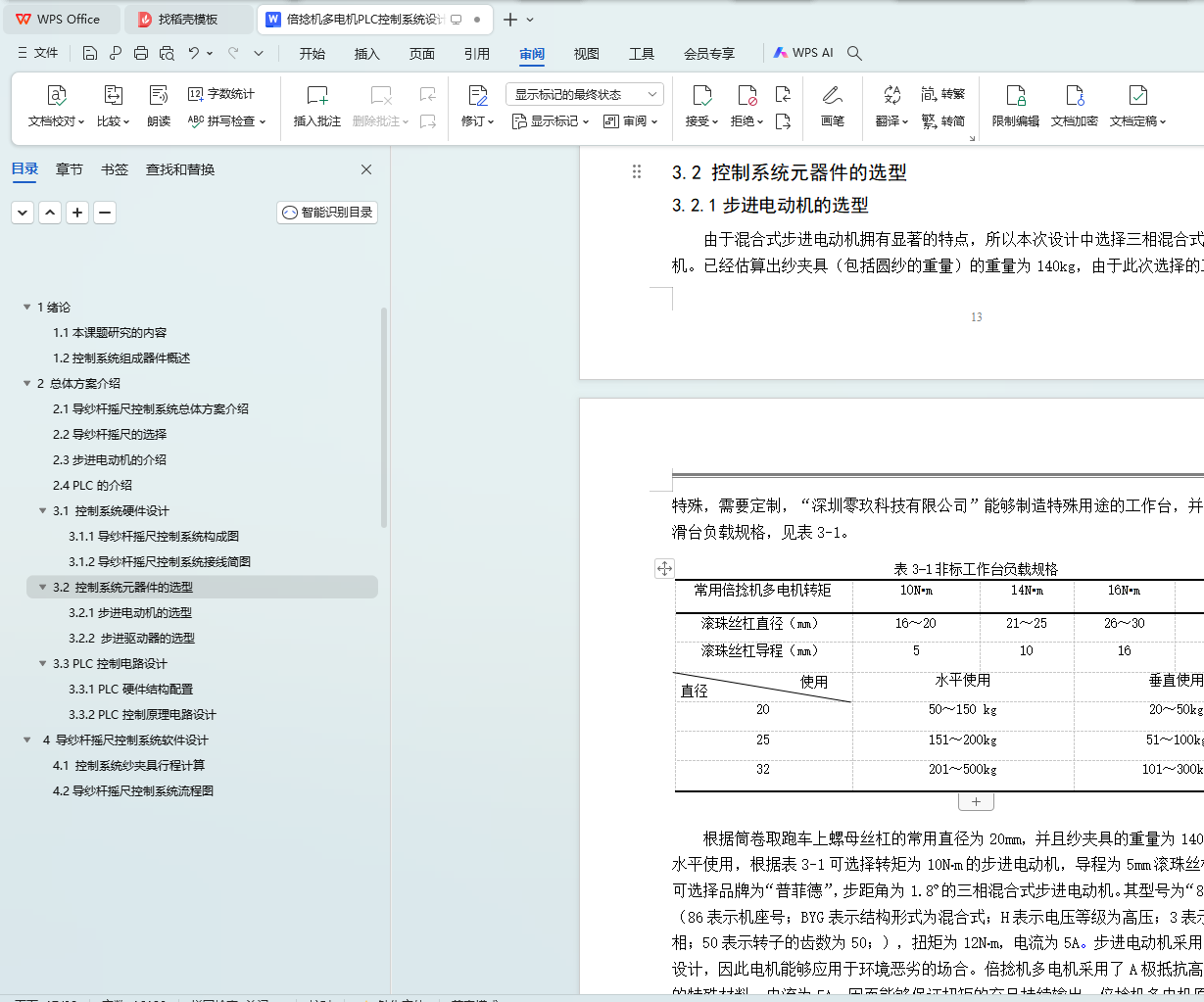
3.2.1步进电动机的选型
3.2.2 步进驱动器的选型
3.3 PLC控制电路设计
3.3.1 PLC硬件结构配置
3.3.2 PLC控制原理电路设计
4 导纱杆摇尺控制系统软件设计
4.1 控制系统纱夹具行程计算
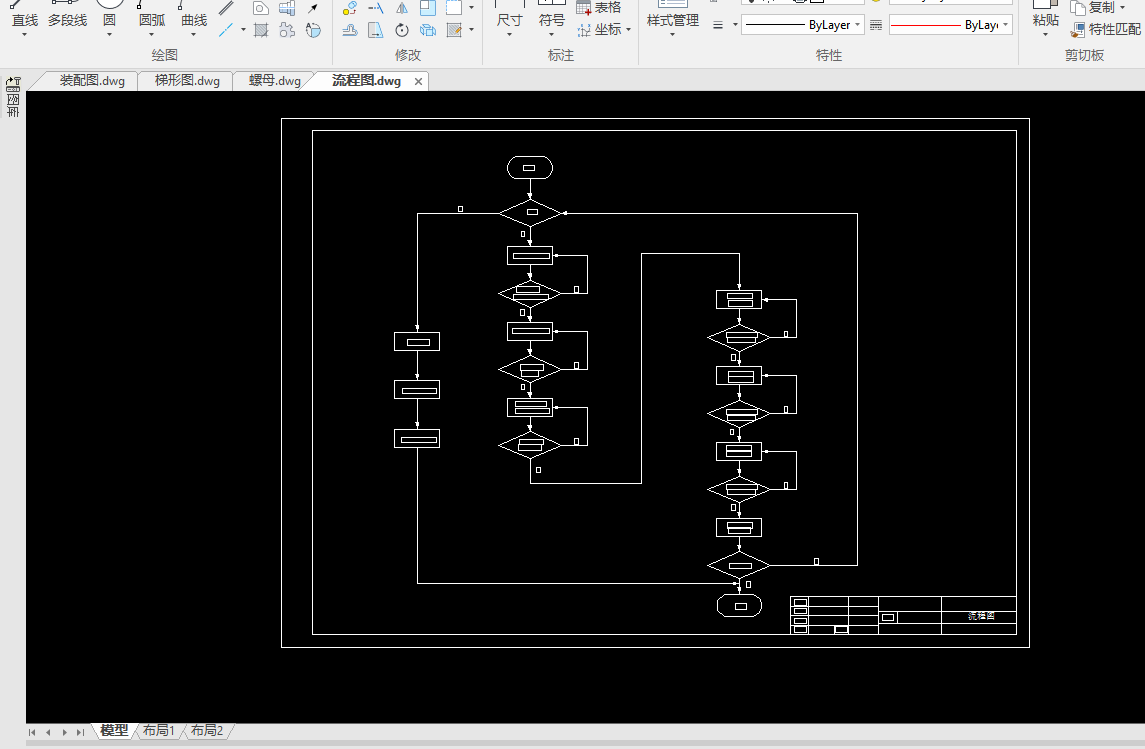
4.2导纱杆摇尺控制系统流程图
4.3 控制系统程序设计
5 人机交互界面设计
5.1触摸屏的选型
5.2系统程序调试
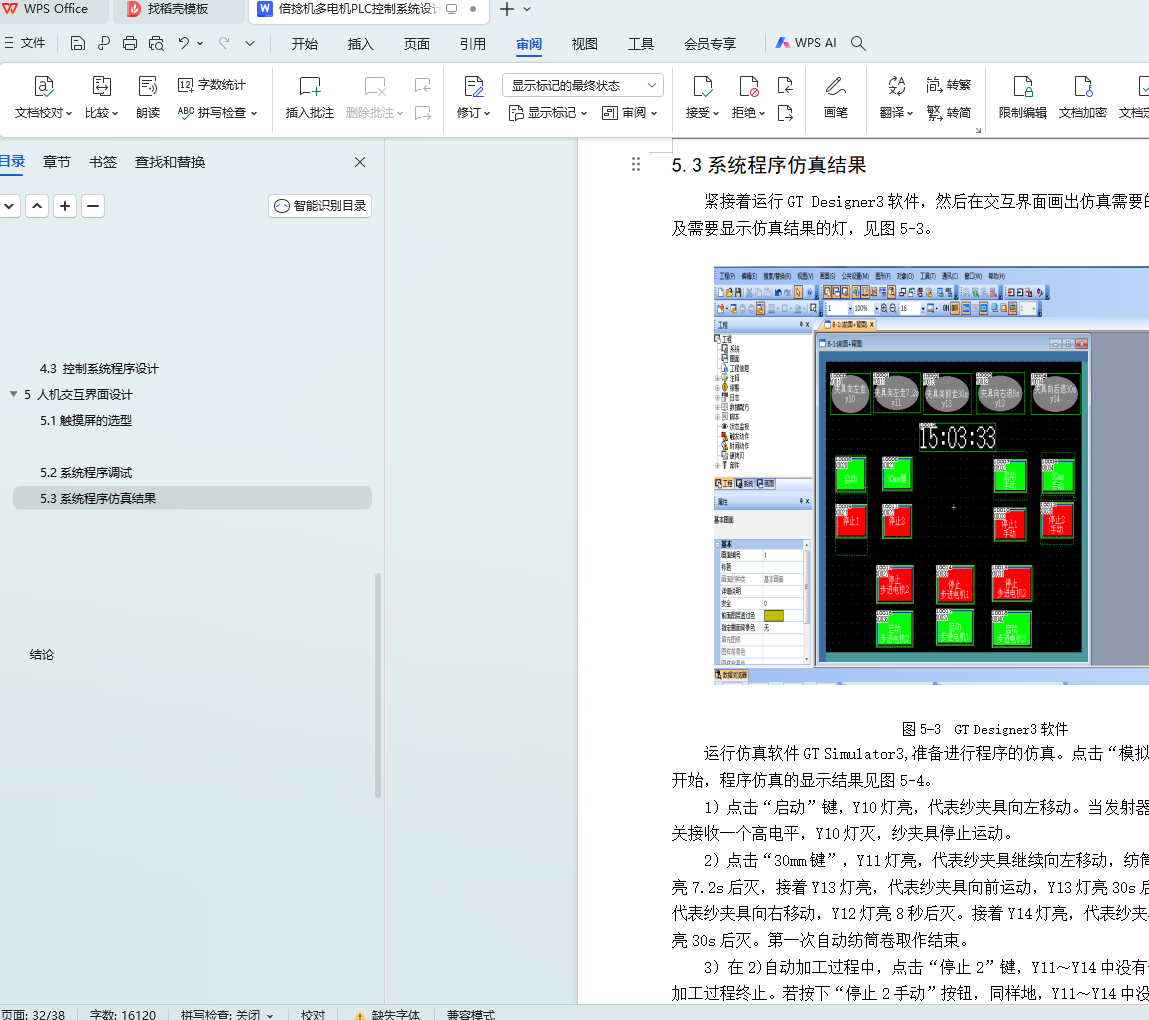
5.3系统程序仿真结果
结论
致谢
参考文献
附录
附录1