摘 要
本次设计是对刚柔混联下肢康复机器人装置的设计。在这里主要包括:滚珠丝杠传动系统的设计、这次毕业设计对设计工作的基本技能的训练,提高了分析和解决工程技术问题的能力,并为进行一般机械的设计创造了一定条件。
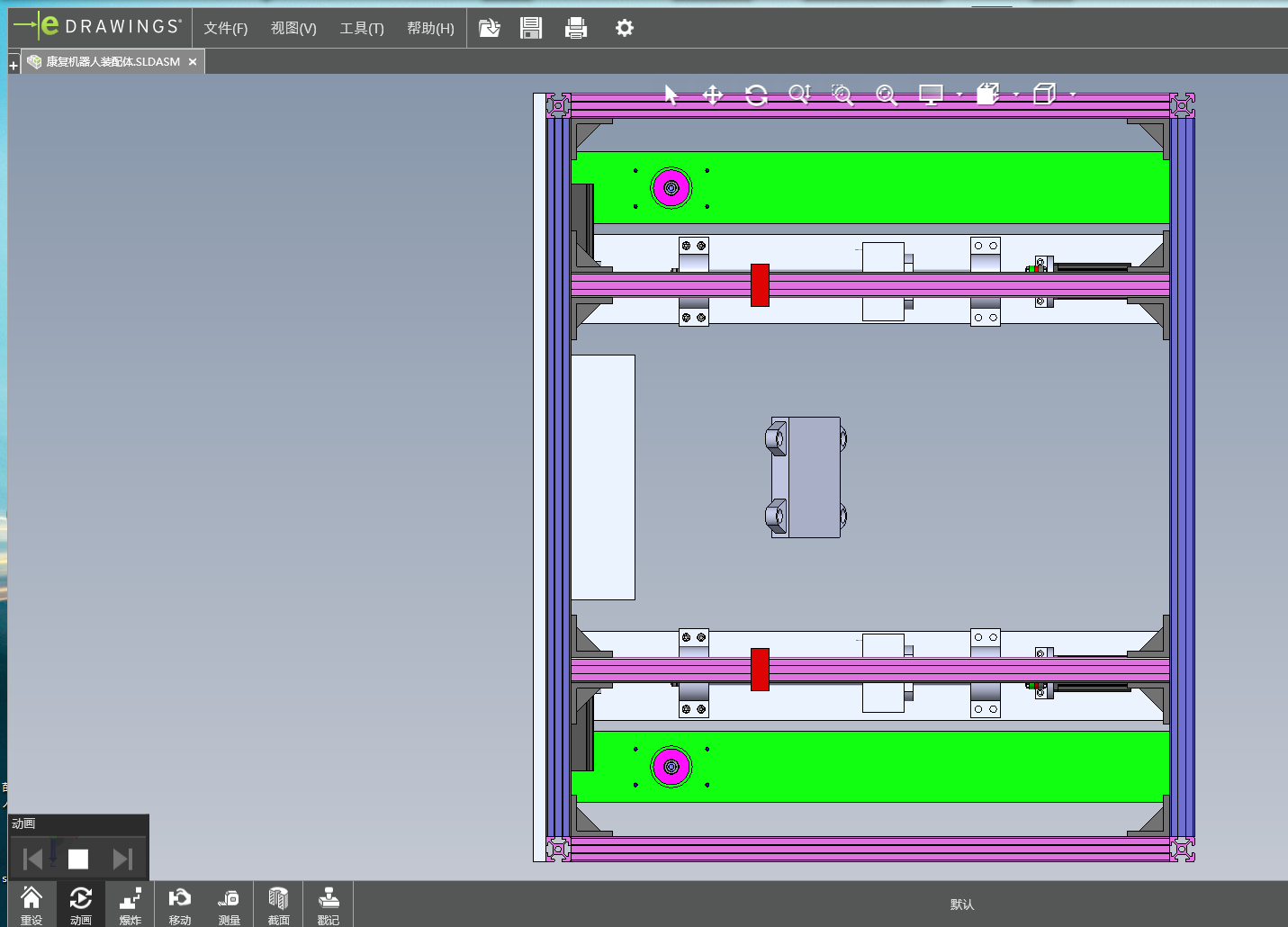
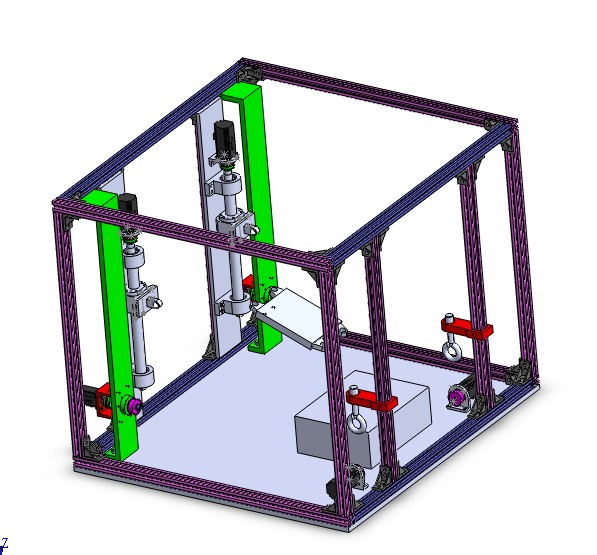
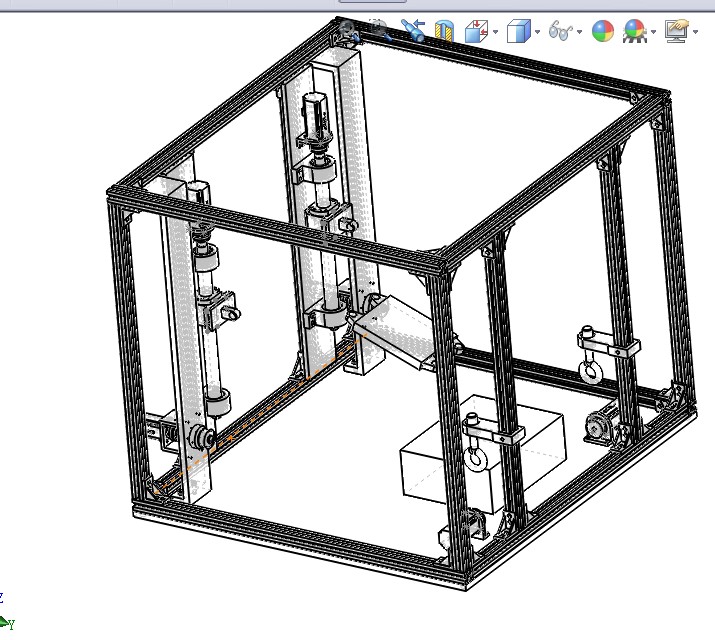
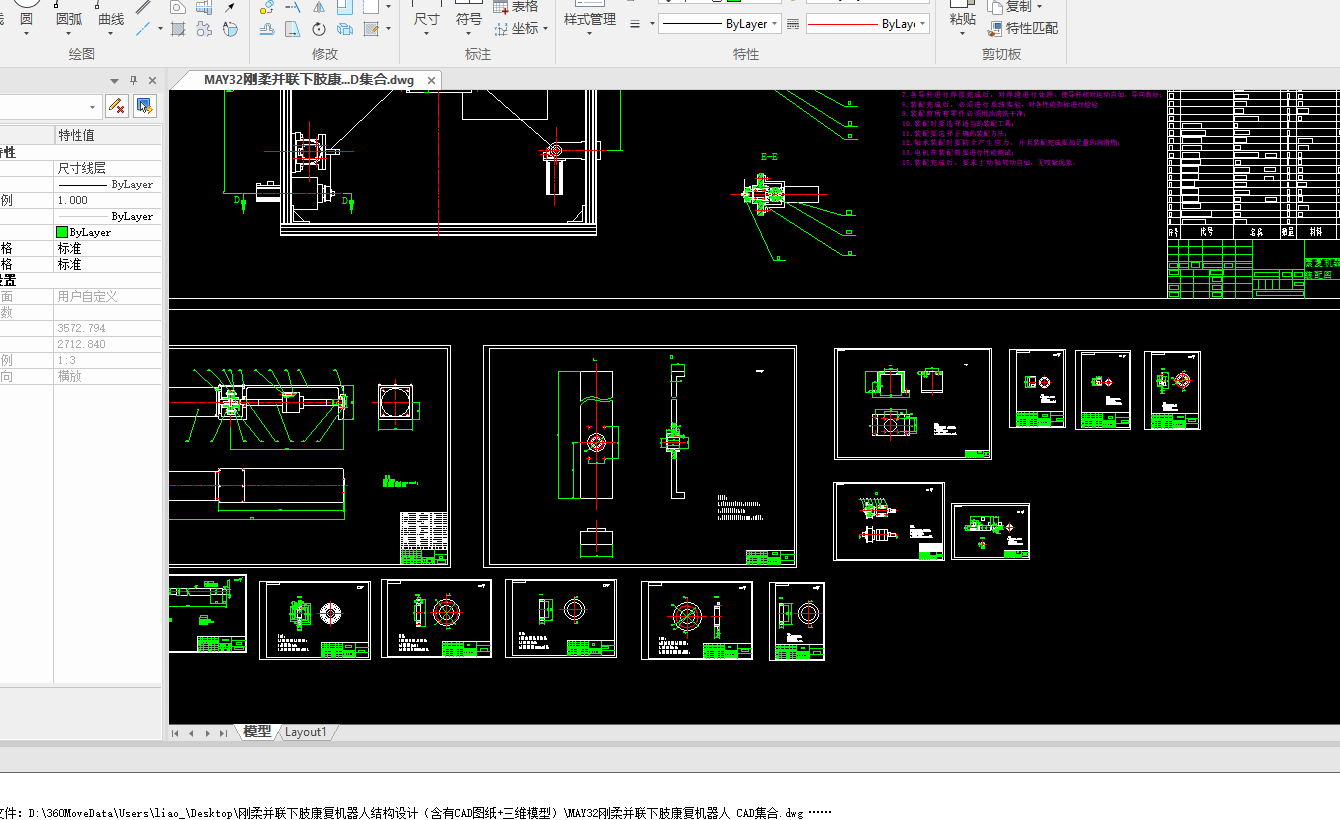
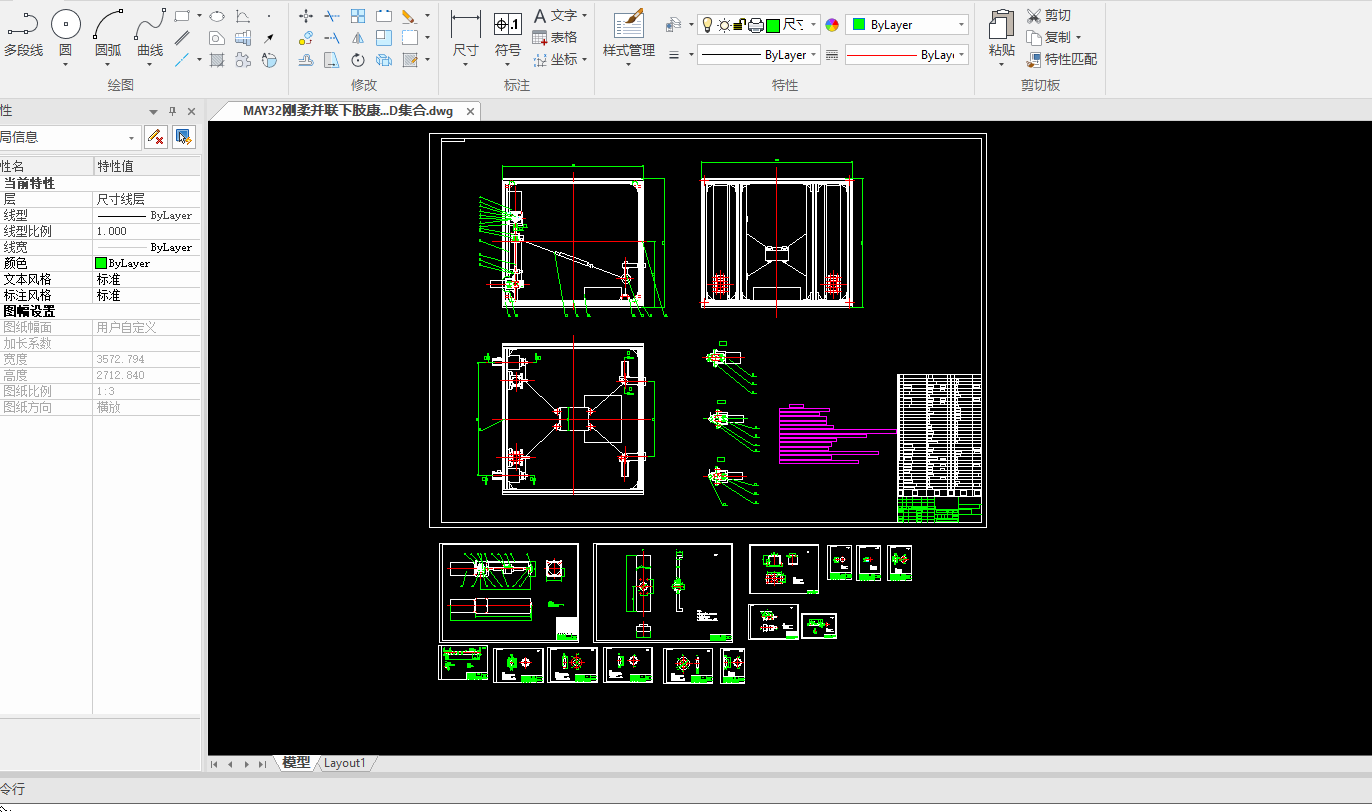
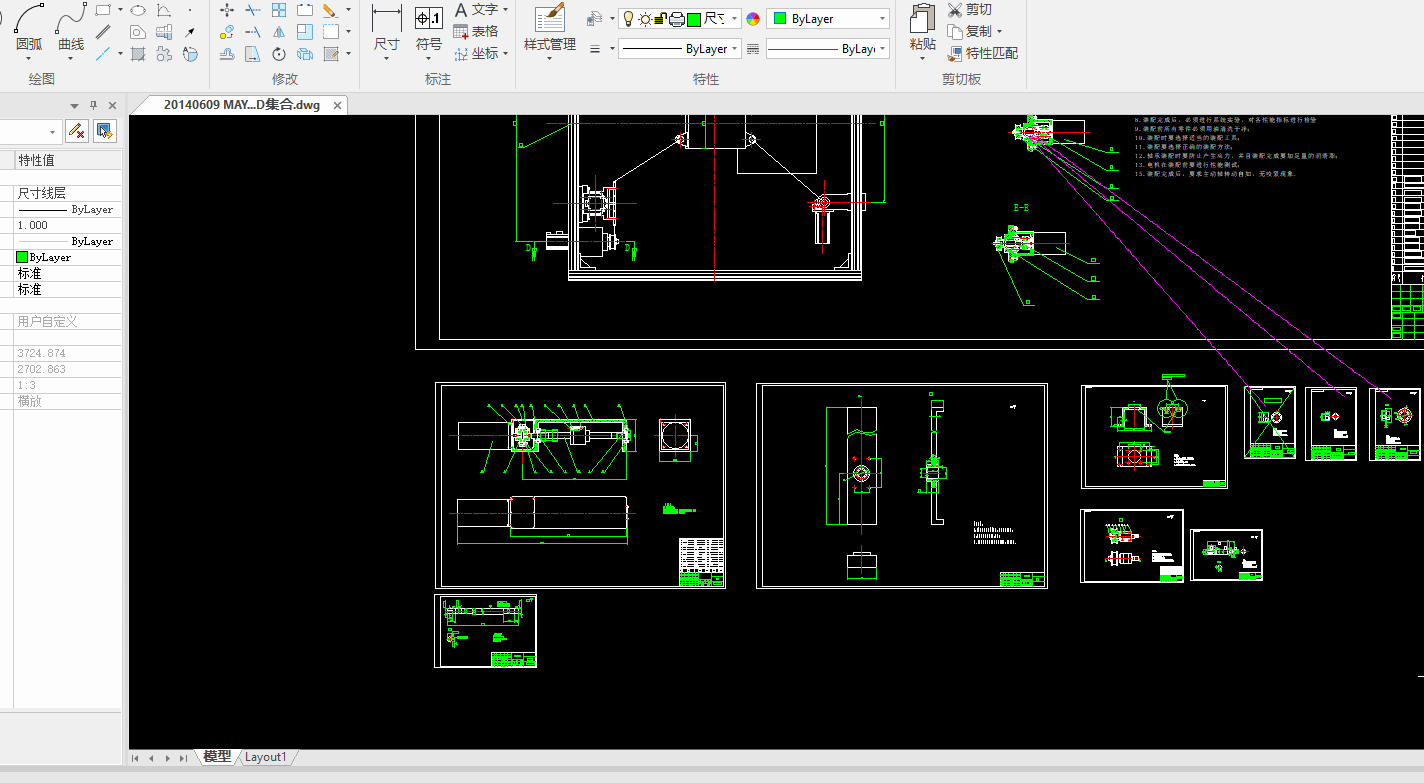
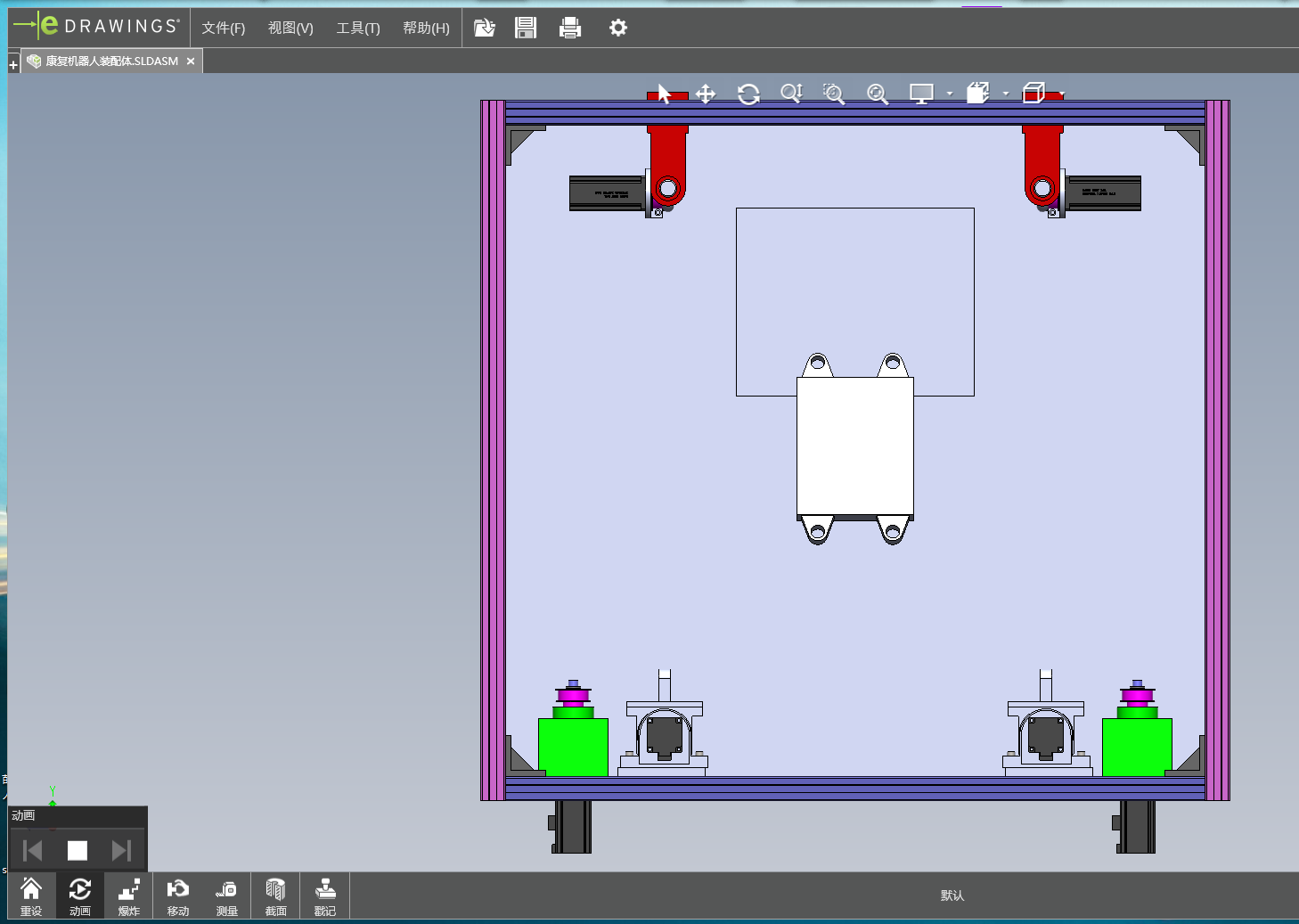
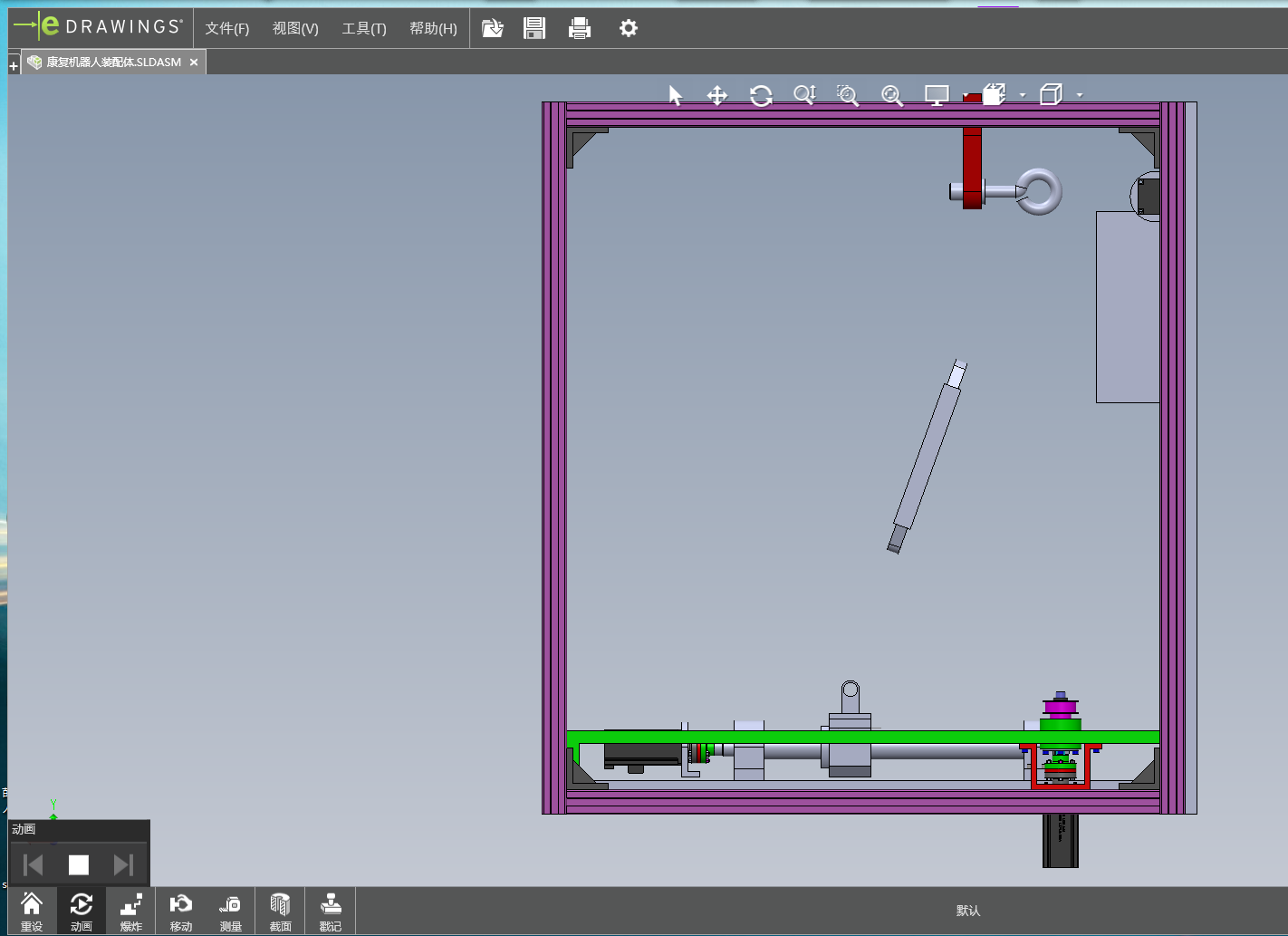
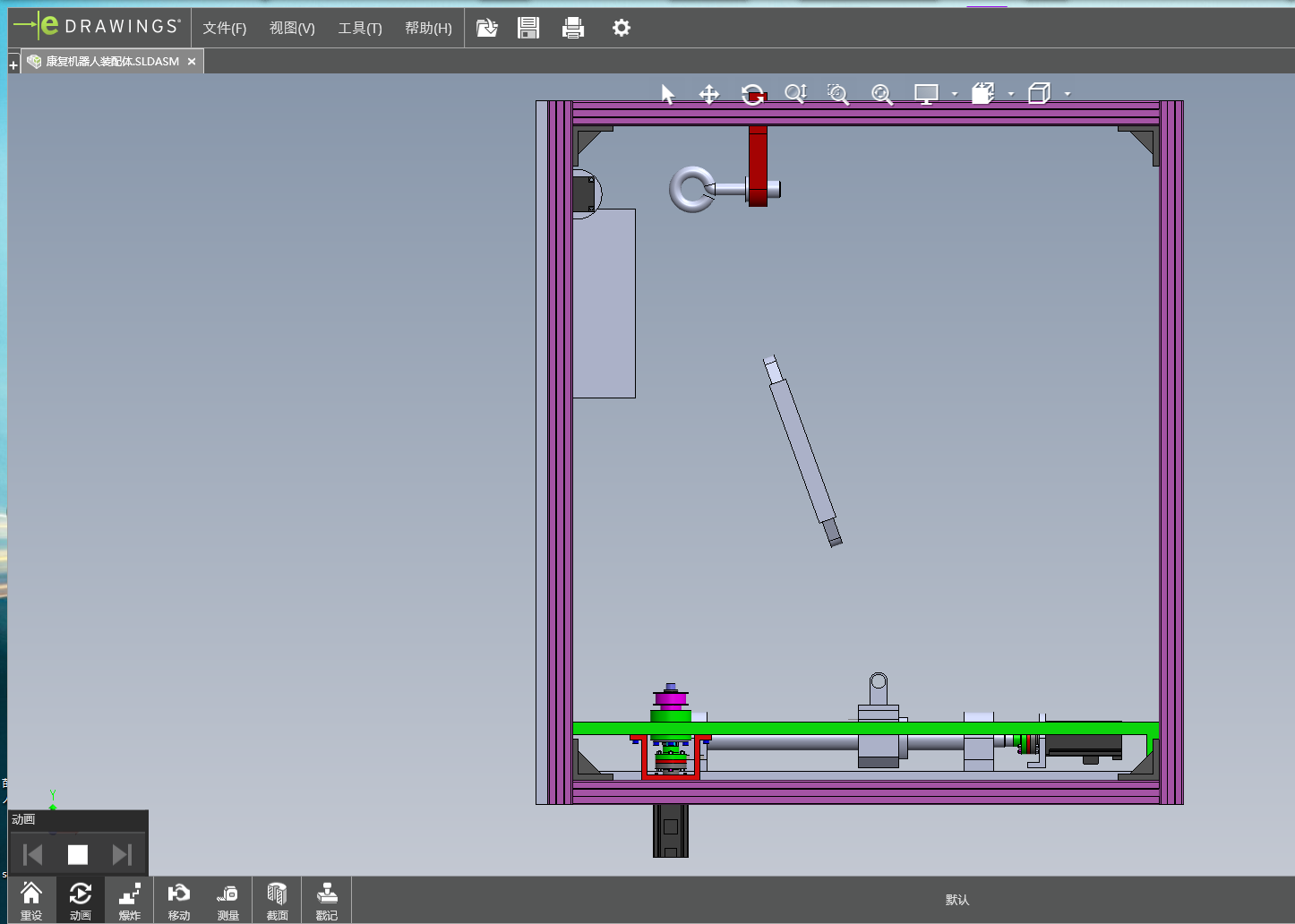
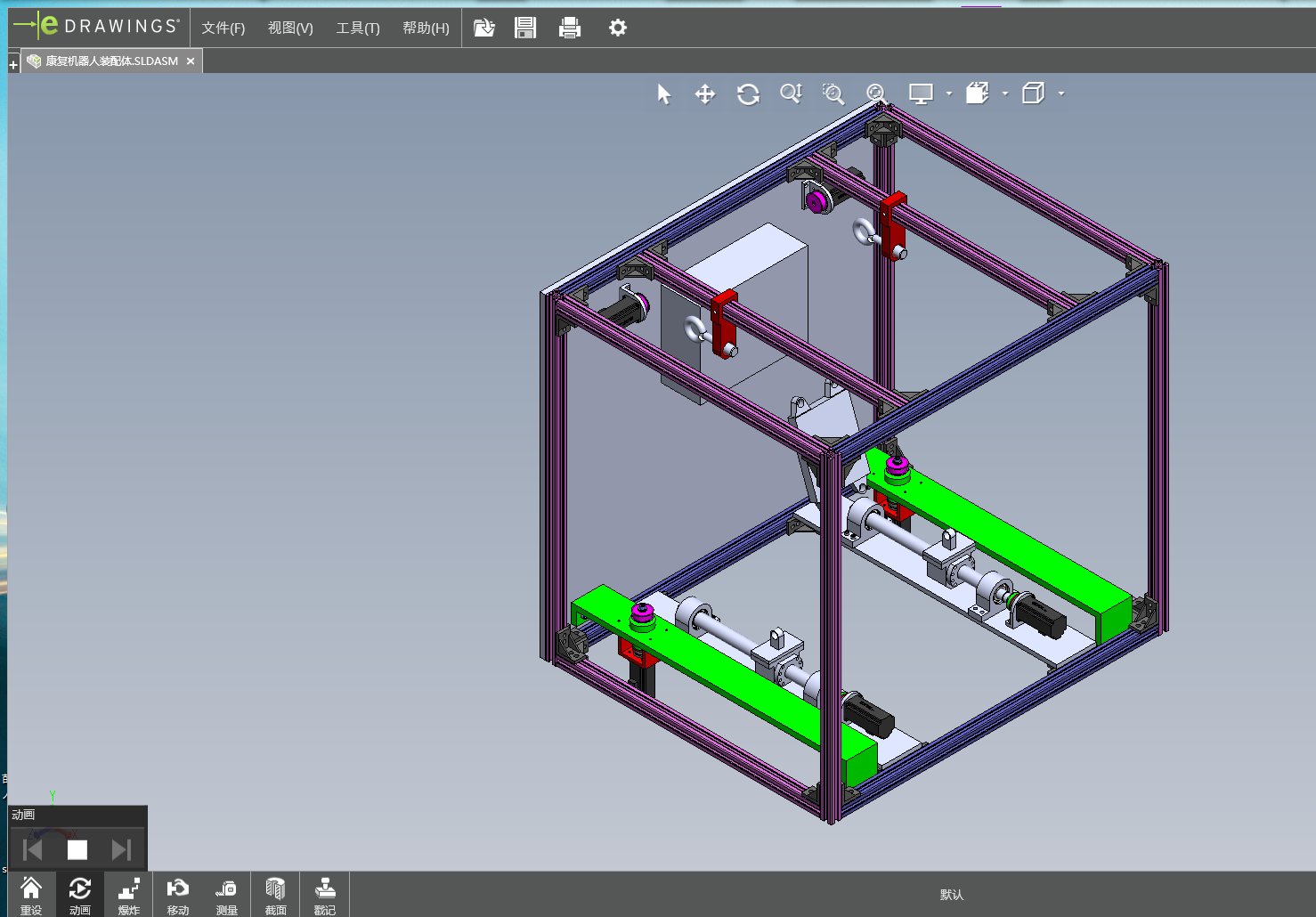
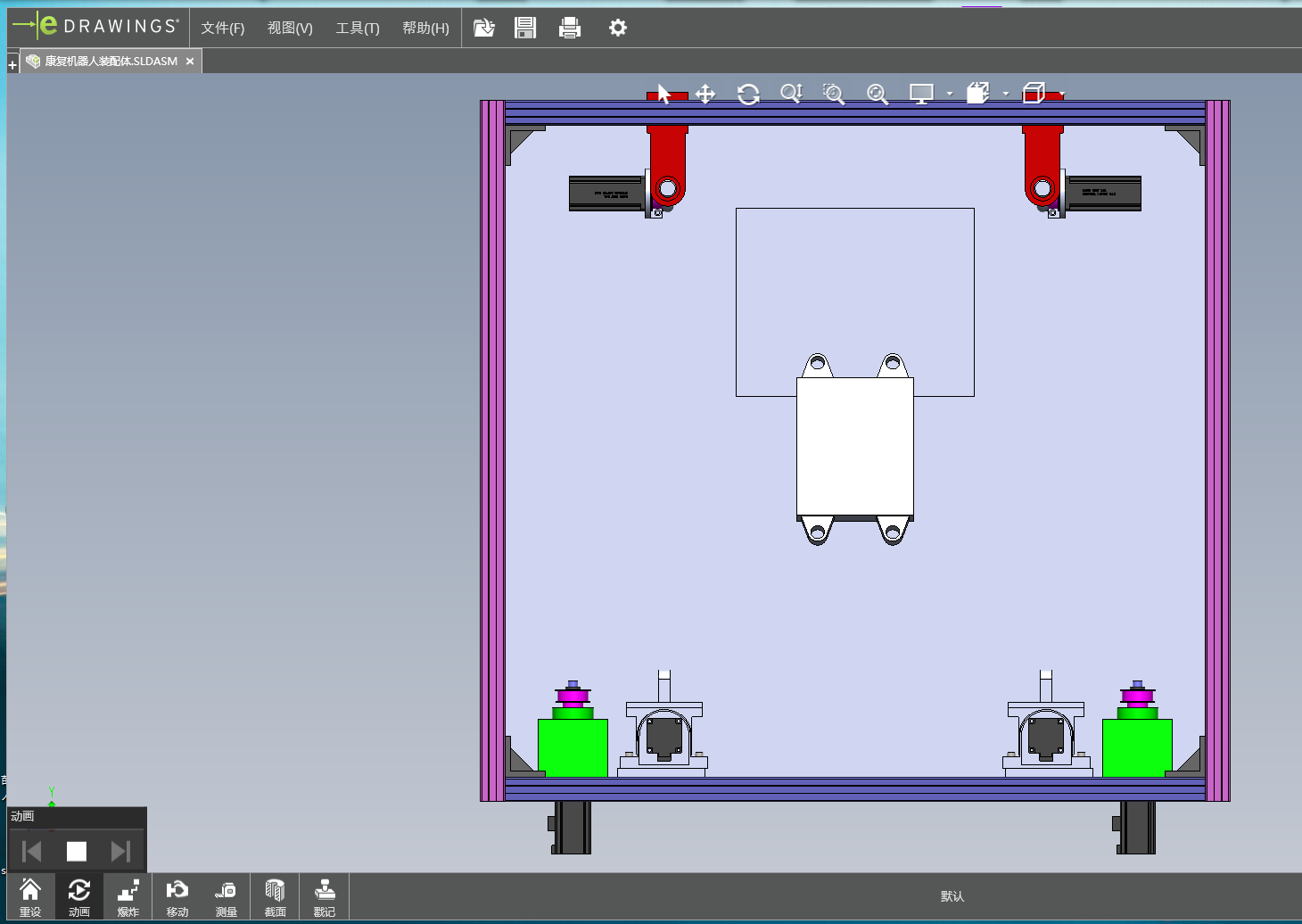
整机结构主要由电动机产生动力通过联轴器将需要的动力传递到丝杆上,丝杆带动丝杆螺母,从而带动整机运动,提高劳动生产率和生产自动化水平。更显示其优越性,有着广阔的发展前途。
本论文研究内容:
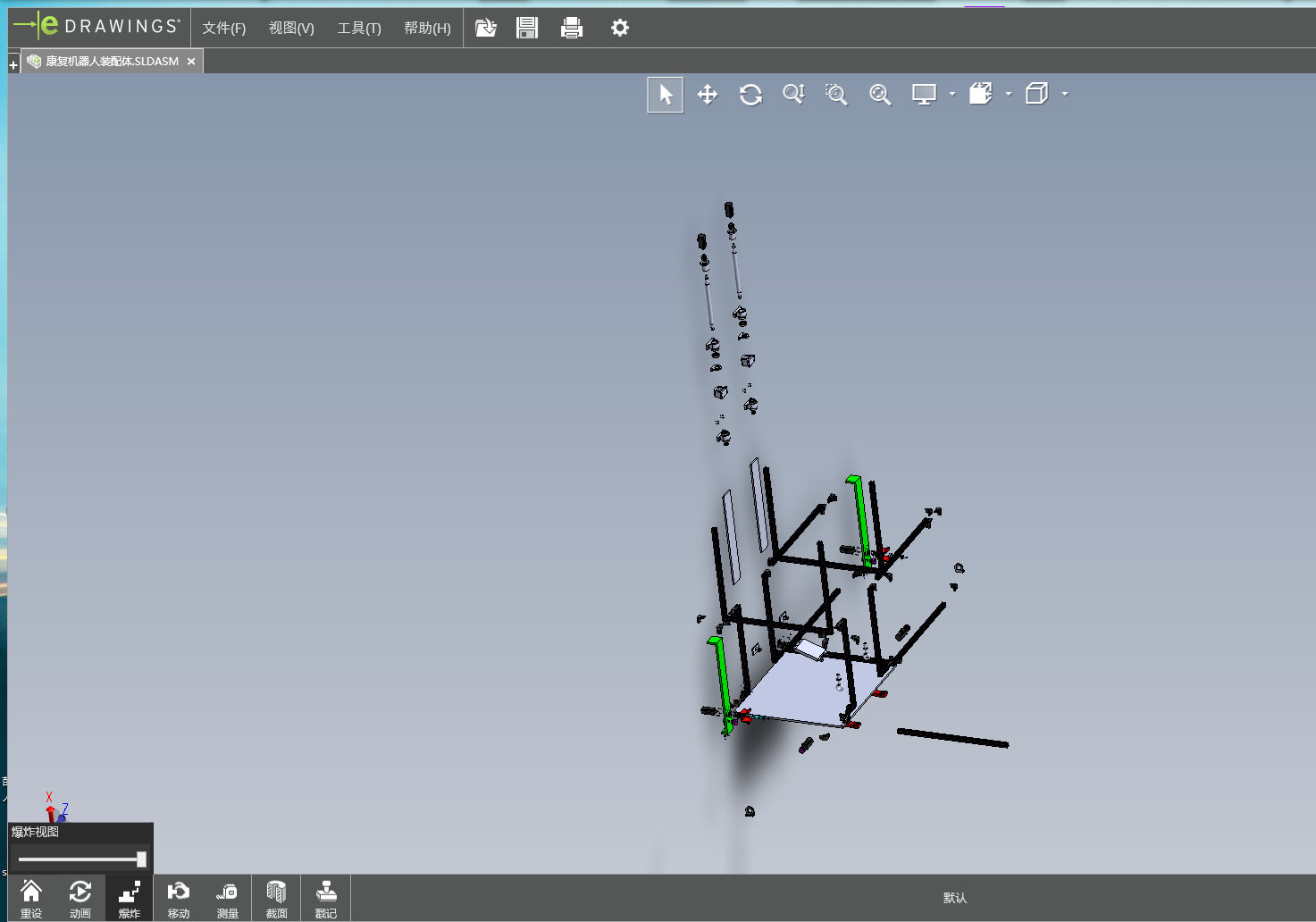
(1) 刚柔混联下肢康复机器人装置总体结构设计。
(2) 刚柔混联下肢康复机器人装置工作性能分析。
(3)电动机的选择。
(4)刚柔混联下肢康复机器人装置的传动系统、执行部件及机架设计。
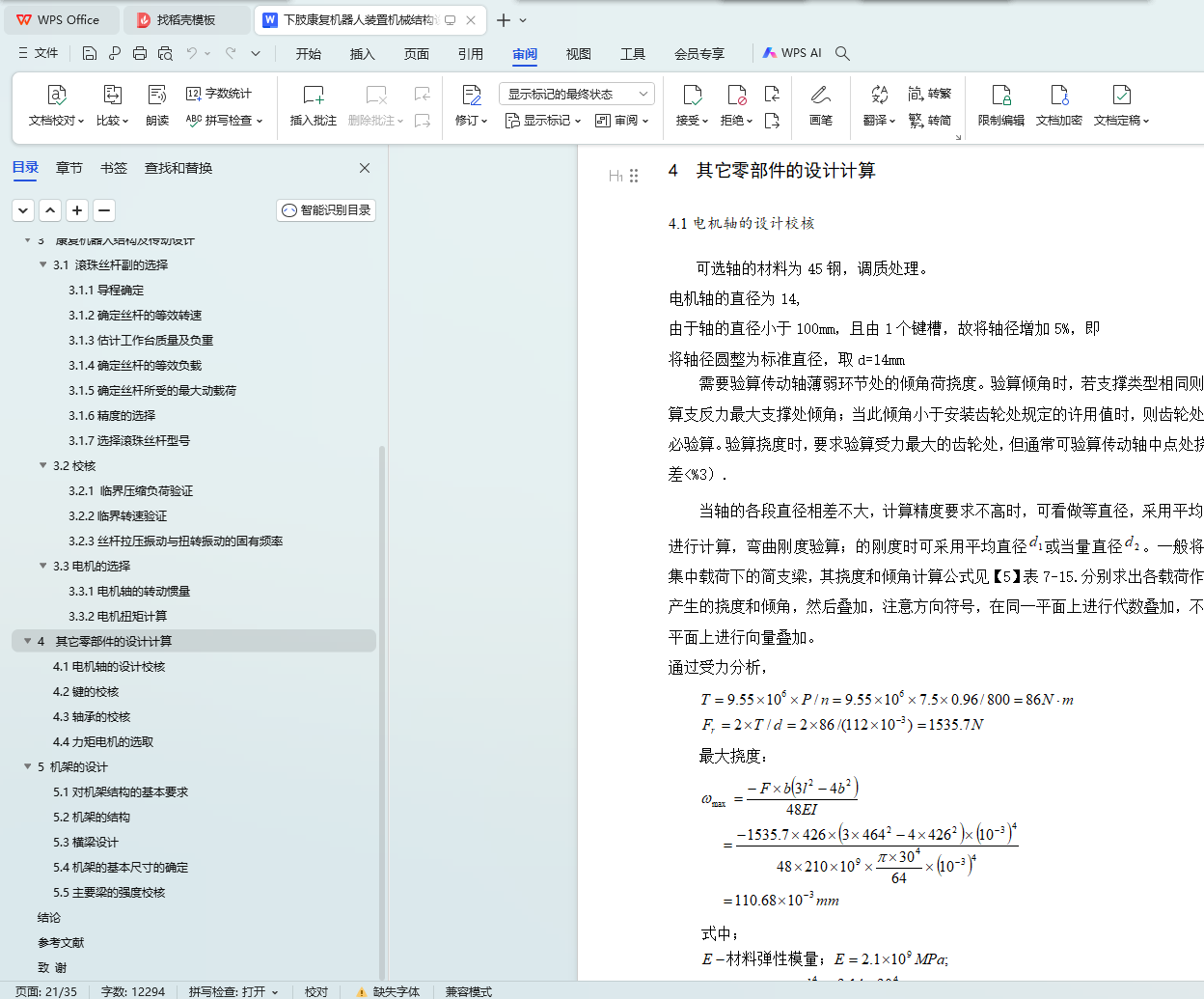
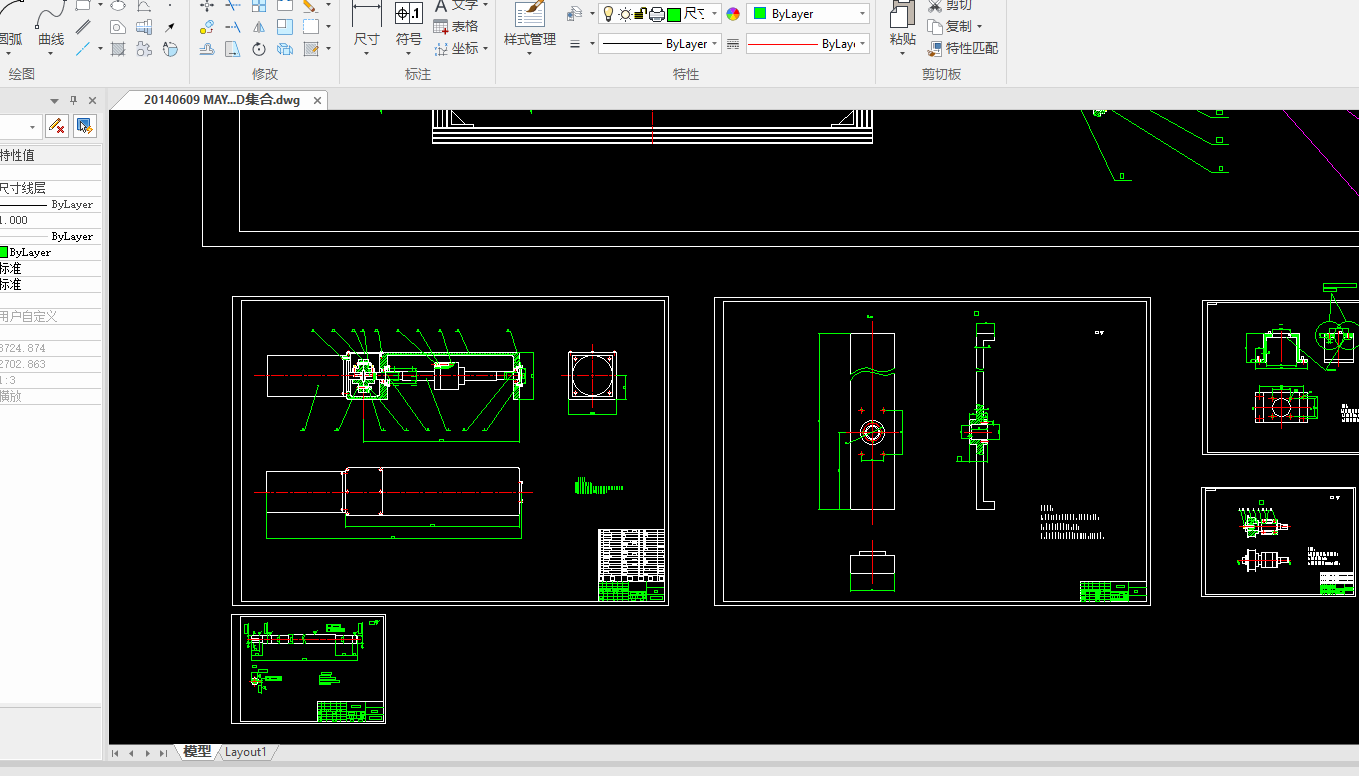
(5)对设计零件进行设计计算分析和校核。
(6)绘制整机装配图及重要部件装配图和设计零件的零件图。
关键词:刚柔混联下肢康复机器人装置,联轴器,滚珠丝杠
Abstract
This design is the design of the lower limb rehabilitation robot device mixed rigid flexible. Here mainly include: Design of ball screw drive system, the graduation design on the design of the basic skills training, enhancing the analysis and to solve engineering problems, and create a certain condition for general mechanical design.
The structure is mainly produced by the motor power through the coupling will need to transfer the power to the screw rod, the screw rod drives the screw rod nut, thereby driving the movement, improve labor productivity and automation level of production. But also show its superiority, there are broad prospects for the development.
The research of this thesis:
(1) the rigid flexible hybrid lower limbs rehabilitative robot device structure design.
(2) analysis of lower limbs rehabilitation robot device performance mixed rigid flexible.
(3) the choice of motor.
(4) transmission system, execution unit and frame design of rigid flexible hybrid lower limbs rehabilitative robot.
(5) the design of components for the design calculation and check.
(6) to draw the assembly drawing and parts assembly diagram and parts diagram design.
Key words: rigid flexible hybrid lower limbs rehabilitative robot device, coupling, ball screw