摘 要
我国是世界最大的辣椒生产国、消费国与出口国,但由于机械化水平较低,辣椒移栽作业仍多采用人工移栽或半自动移栽方式,存在作业劳动强度大、作业效率低等不足;市场上现有的自动移植装置种类少、价格高、结构复杂,自动取投苗技术的理论研究存在一定不足,严重影响辣椒移栽效率与质量的提高。
本文介绍了一种辣椒移植装置的结构设计。该装置主要针对辣椒种植过程中移植环节的自动化和高效化需求,通过机械结构的设计,实现了自动取苗、移植和覆土等功能。本文详细阐述了该装置的整体结构、工作原理、材料选择和制造工艺等方面的内容,并通过实验验证了其可行性和实用性。该装置的优点包括:提高移植效率、减轻劳动强度、保证移植质量、适应性强等。
关键词:辣椒移植装置;结构设计;自动化;高效化;取苗;移植;覆土;实验验证。
Abstract
China is the world's largest pepper producer, consumer and exporter, but due to the low mechanization level, pepper transplanting operation is still mostly manual transplanting or semi-automatic transplanting, there are insufficient labor intensity and low operation efficiency; the existing automatic transplanting machine in the market has few types, high price, complex structure, the theoretical research of automatic seedling transplanting technology has some deficiencies, which seriously affects the efficiency and quality of pepper transplanting.
This paper describes the structural design of a pepper graft device. The device mainly aims at the automation and high efficiency of the transplanting process in the pepper planting process. Through the design of the mechanical structure, it realizes the functions of automatic seedling extraction, grafting and soil covering, etc. This paper details the overall structure, working principle, material selection and manufacturing process of the device, and verifies its feasibility and practicability through experiments. The advantages of this device include: improving transplantation efficiency, reducing labor intensity, ensuring transplantation quality, and having strong adaptability.
Key words: pepper transplantation device; structure design; automation; high efficiency; seedling extraction; transplantation; soil covering; experimental verification.
目 录
第一章 绪论…………………………………………………………………3
1.1 国内外移植装置的历史和发展状况……………………………………………3
1.1.1国外移植装置的发展状况……………………………………………………3
1.1.2国内移植装置械的发展概况…………………………………………………4
1.1.3国内移植装置械的主要问题…………………………………………………4
1.2发展旱地辣椒移植装置械的必要性……………………………………………5
1.3 移植装置的分类及特点…………………………………………………………7
1.4 机械化移栽目前存在的主要问题…………………………………………10
1.5 选题分析(科学性、可行性论证)和内容……………………………………11
第二章 总体方案…………………………………………………………13
2.1 辣椒移栽的基本农艺要求…………………………………………………13
2.2 主要技术参数………………………………………………………………13
2.3 移植装置作业的技术要求……………………………………………………14
2.3.1 性能评定指标与检测方法………………………………………………14
2.3.2 辣椒栽植状态指标………………………………………………………16
2.3.3 生产率性能指标…………………………………………………………18
2.3.4 移植装置适应性指标………………………………………………………18
2.3.5 自动化程度指标…………………………………………………………19
2.4 结构特征与工作原理………………………………………………………19
第三章 关键技术解决办法………………………………………………23
3.1 设计方法选择………………………………………………………………23
3.2 方案选择……………………………………………………………………24
第四章 载插机构的设计及计算…………………………………………25
4.1 移植装置载插机构的设计……………………………………………………25
4.2 具体设计过程………………………………………………………………25
4.2.1 方法学……………………………………………………………………25
4.2.2 种植机械的输出运动需求………………………………………………26
4.2.3 连接参数的设计…………………………………………………………26
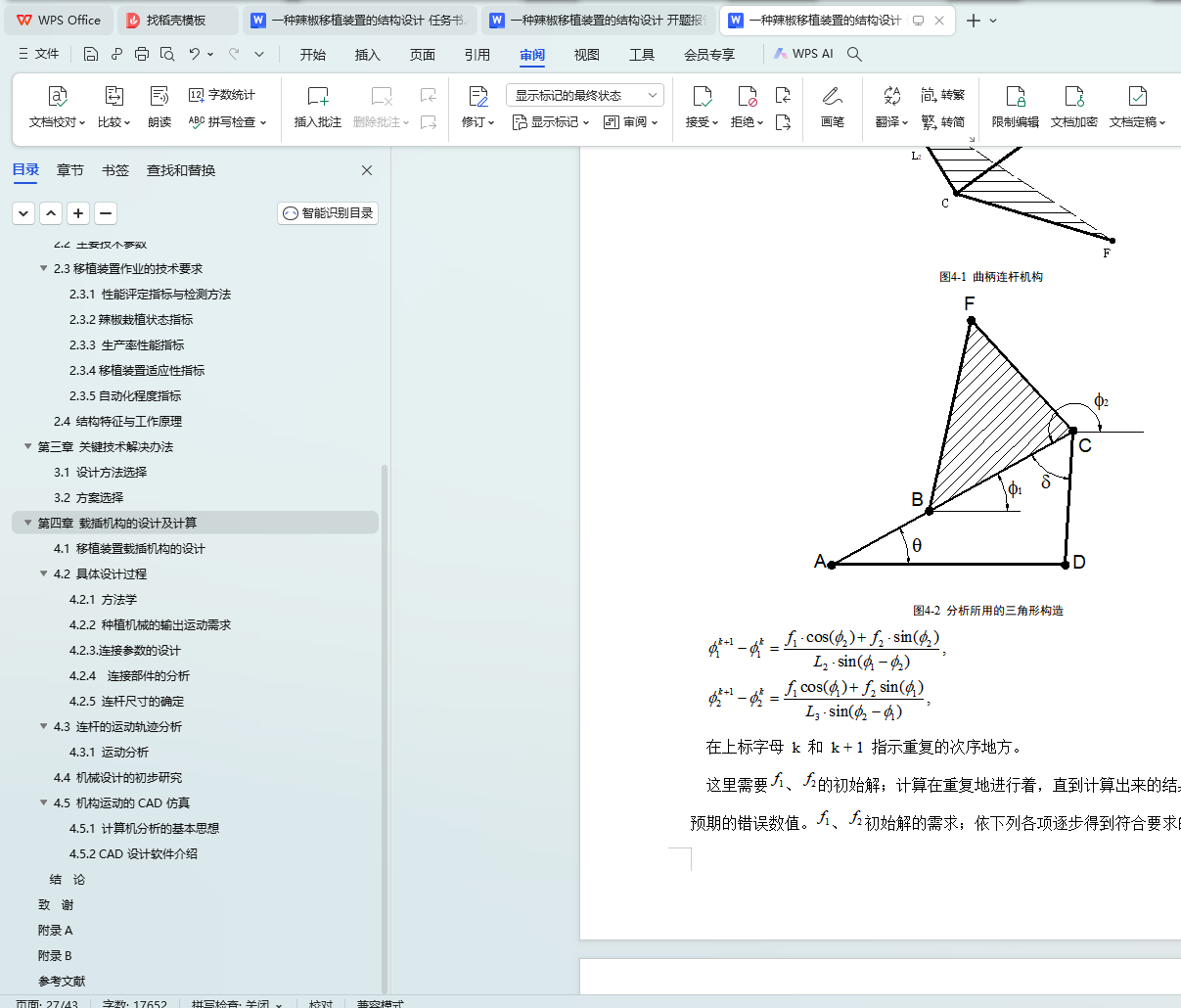
4.2.4 连接部件的分析…………………………………………………………27
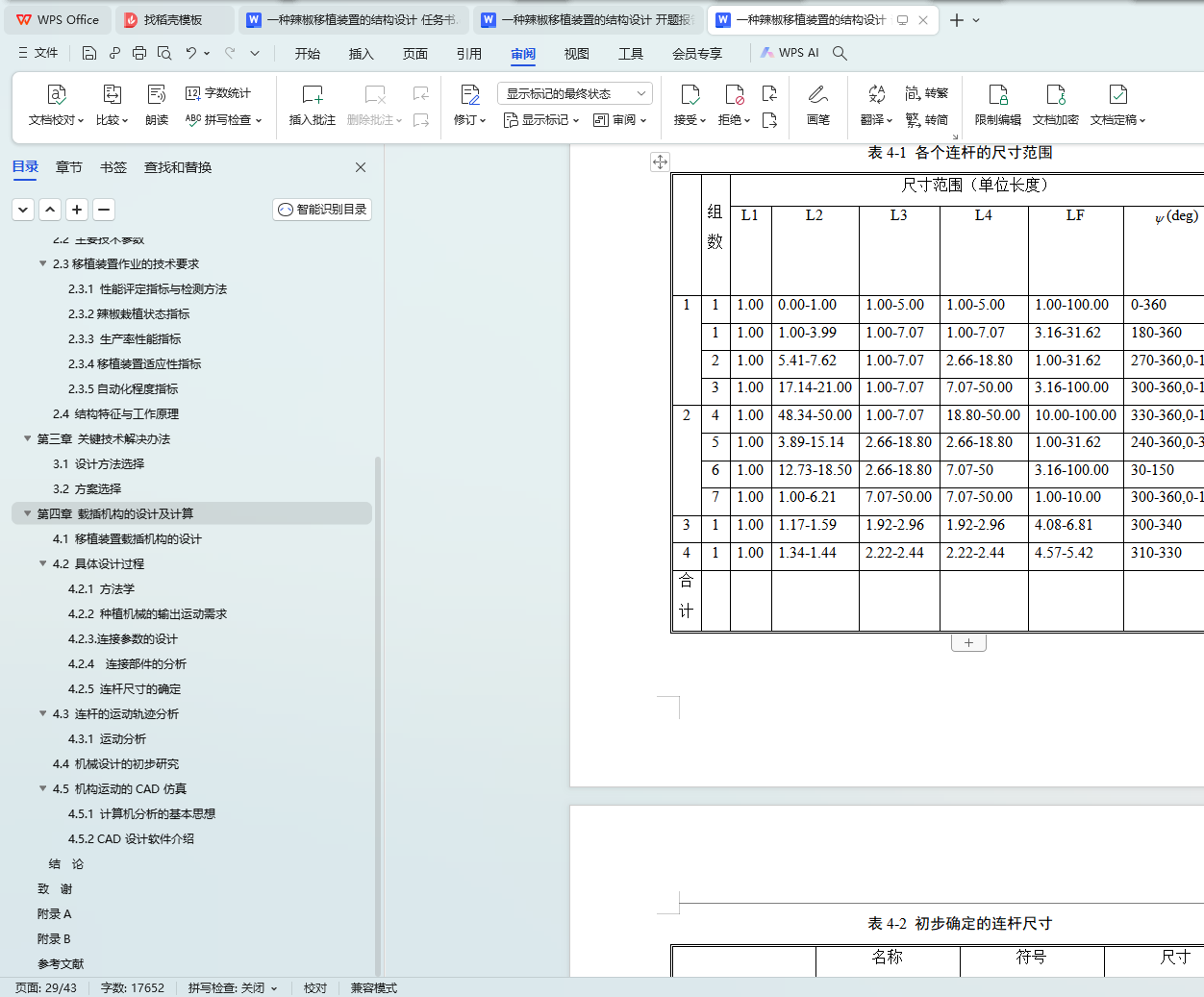
4.2.5 连杆尺寸的确定…………………………………………………………29
4.3 连杆的运动轨迹分析………………………………………………………31
4.3.1 运动分析…………………………………………………………………31
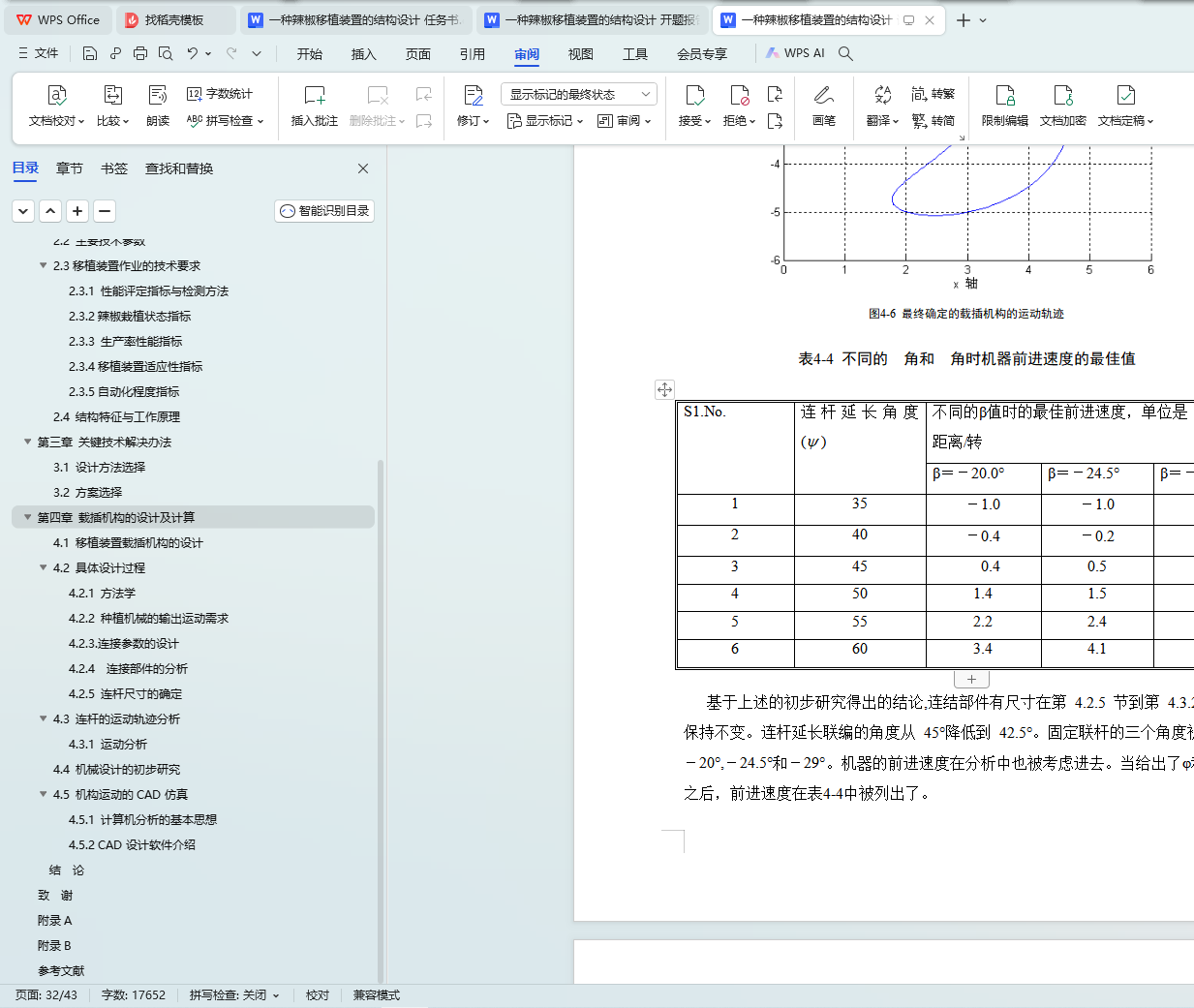
4.3.2 确定最佳运动轨迹………………………………………………………32
4.4 机械设计的初步研究………………………………………………………34
4.5 机构运动的CAD仿真………………………………………………………36
4.5.1 计算机分析的基本思想…………………………………………………36
4.5.2 CAD设计软件介绍…………………………………………36
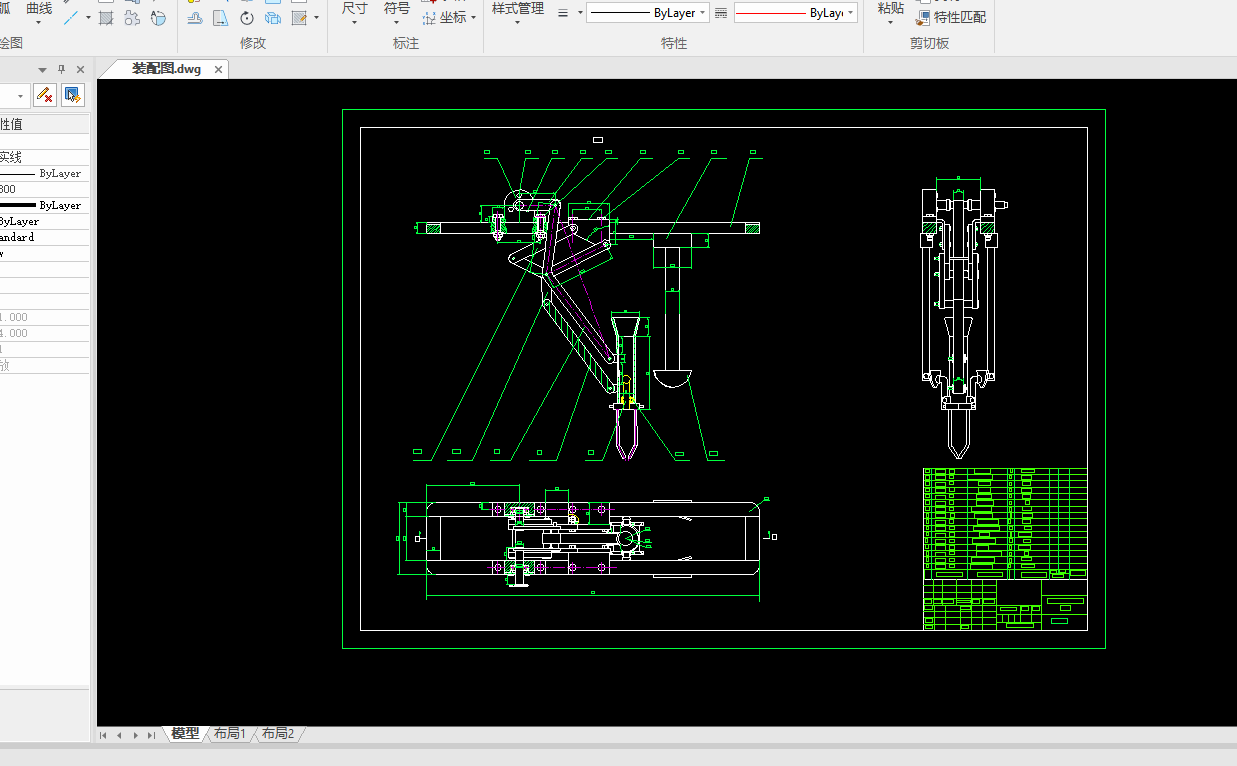
4.5.3 机构的CAD图……………………………………………………………37
4.6 主要工作情况………………………………………………………………37
结 论………………………………………………………………………39
致 谢………………………………………………………………………41
附录A………………………………………………………………………42
附录B………………………………………………………………………45
参考文献……………………………………………………………………47