摘 要
近些年,我国从事农业方面的劳动力逐年降低,极大地限制了我国农业的生产与发展。在此背景下,我国大力开展对智能农机和智慧农业的研究。其中农机无人化作业是发展智慧农业的基础技术之一,也是未来农业生产的重要保障和必然趋势,而实现农机无人化作业的重要一步便是农机作业路径的自动生成。
本文设计并实现了一个耙地机全局路径规划算法。提出了一种纯右转单元套行法的耙地机条带路由策略。与传统单元套行法相比,该方法符合耙地机的作业特点,其计算简便,也便于编程实现,但是没有考虑到产生的耙沟数量。
提出了另一种基于遗传算法的耙地机条带路由策略,该方法同时将耙地机总作业路程和产生的耙沟数作为优化目标,能够得到综合质量较高的规划结果。本文还将其与纯右转单元套行法的规划结果进行了对比分析。
开发了一款以PyQt5为主框架的耙地机全局路径规划软件,用户可以通过简洁、易上手的可交互界面来使用耙地机全局路径规划算法。通过数据可视化技术,对规划出的农机作业路径进行动态仿真,让用户对规划结果有更直观的了解。
关键词:耙地机,全局路径规划,纯右转单元套行法,遗传算法
Abstract
In recent years, the labor force engaged in agriculture in my country has been decreasing year by year, which has greatly restricted the production and development of my country's agriculture. In this context, my country has vigorously carried out research on smart agricultural machinery and smart agriculture. Among them, the unmanned operation of agricultural machinery is one of the basic technologies for the development of smart agriculture, and it is also an important guarantee and inevitable trend of future agricultural production. An important step to realize the unmanned operation of agricultural machinery is the automatic generation of agricultural machinery operation paths.
A global path planning algorithm for earth harrows is designed and implements. A strip routing strategy is proposed for the rake, which is a pure right-turn unit arranging method. Compared with the traditional unit nesting method, this method conforms to the operation characteristics of the earth raking machine, its calculation is simple and easy to realize by programming, but the influence of the number of grooves produced by the operation of the earth raking machine is not considered.
Another method based on genetic algorithm is proposed for the strip routing strategy of the earth raking machine. This method takes the total operation distance of the earth raking machine and the number of trenches produced by the operation as the optimization objective at the same time, which can obtain the planning result with higher comprehensive quality. This article also compares it with the planning results of the pure right-turn unit arrangement method.
A global path planning software for ground harrows based on PyQt5 has been developed. Users can use the global path planning algorithm of ground harrows through a simple, easy-to-use and interactive interface. Through data visualization technology, the planned agricultural machinery operation path is dynamically simulated, allowing users to have a more intuitive understanding of the planning results.
Key words: raking machine, global path planning, pure right turn unit arrangement method, genetic algorithm
目 录
第一章 绪论
1.1课题研究背景
1.2国内外研究现状
1.3研究目标与内容
1.4本章小结
第二章 农机全局路径规划系统总体设计
2.1系统层次结构
2.2软件功能模块设计
2.3总体技术路线
2.4本章小结
第三章 农机全局路径规划算法设计与实现
3.1地理坐标数据处理
3.2作业区与转弯区划分方法
3.3作业区条带划分方法
3.4作业区条带路由策略
3.5耙地机跨条带转弯策略
3.6添加转弯路径方法
3.7转弯区收边作业方法
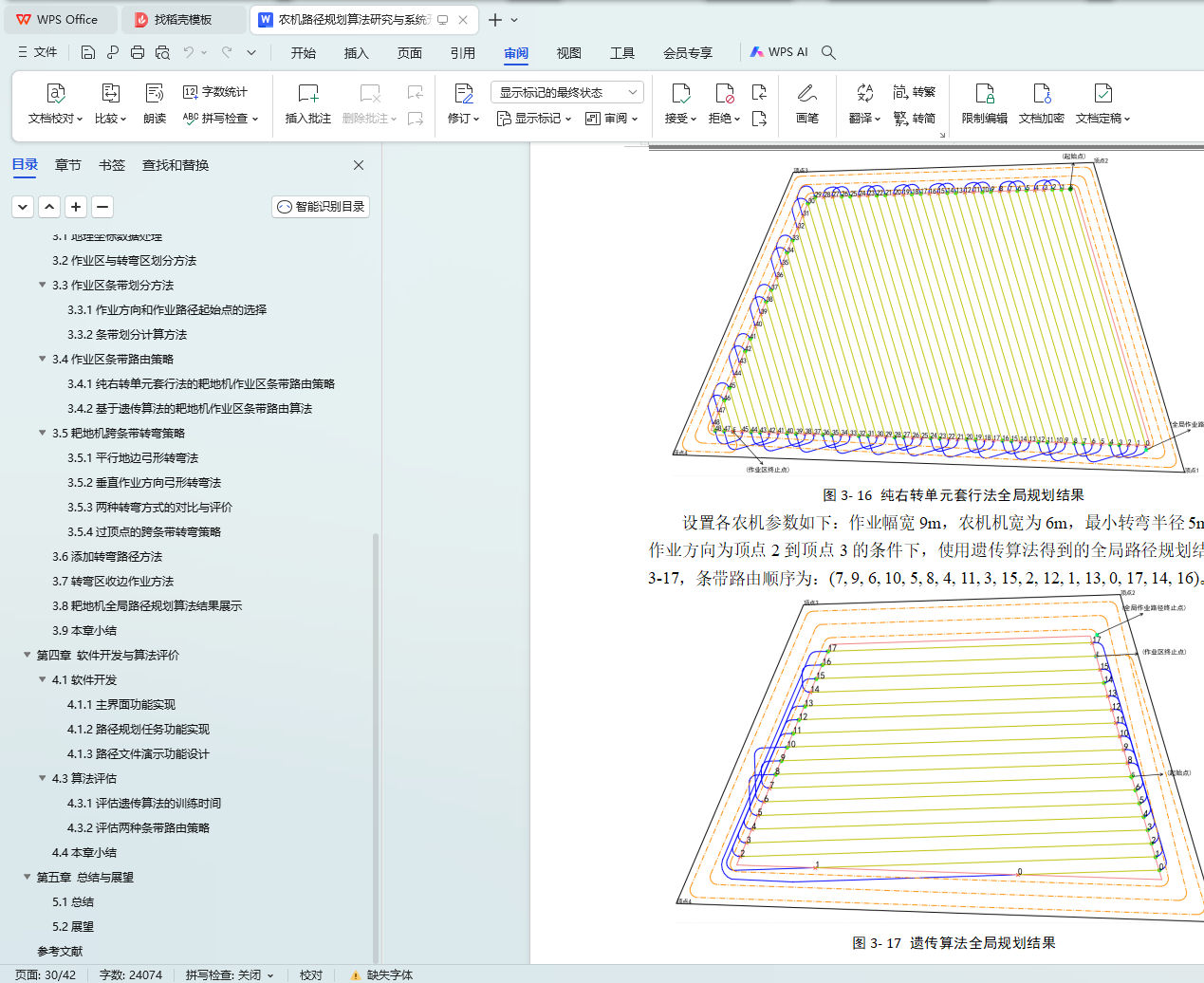
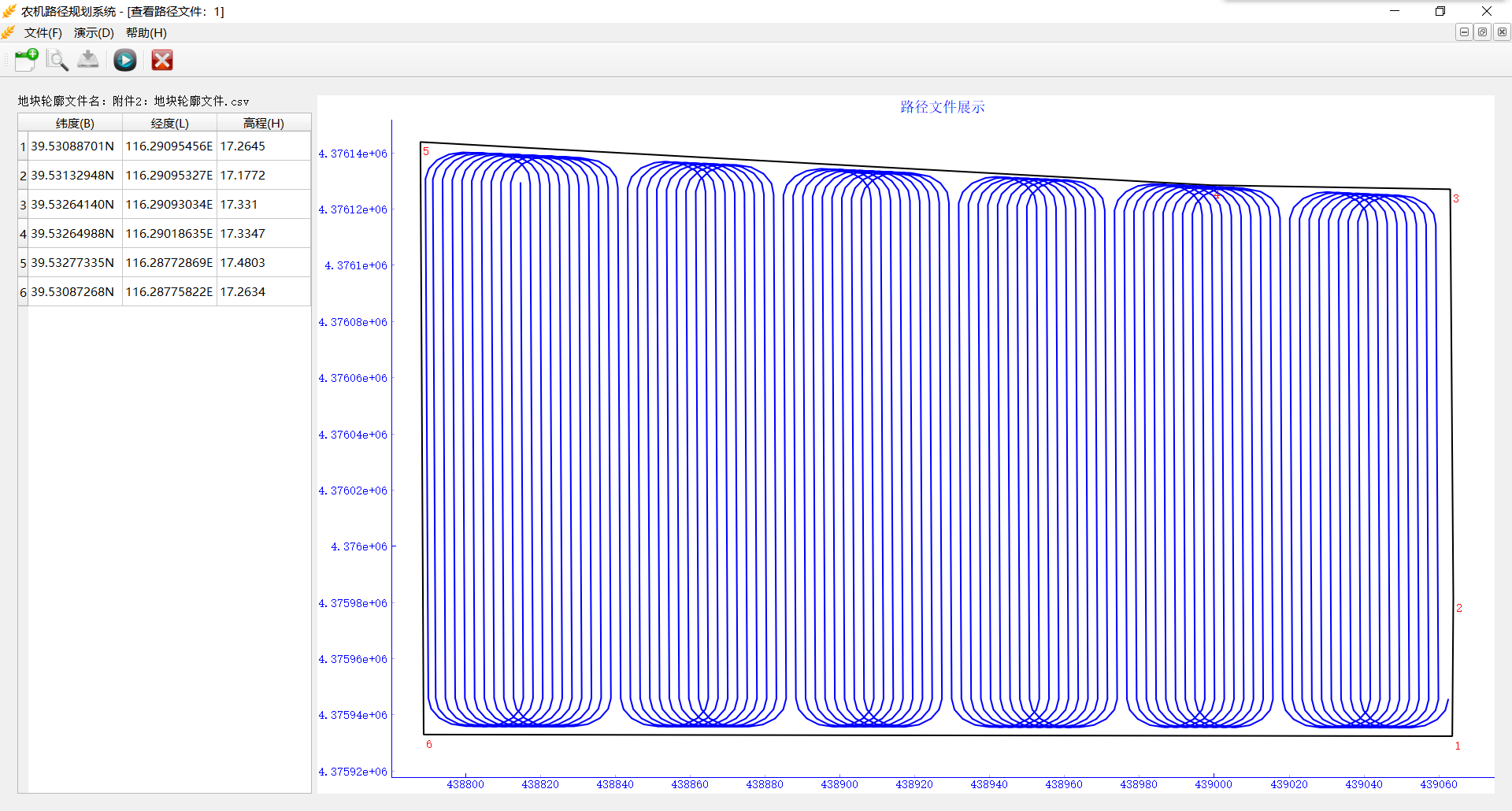
3.8耙地机全局路径规划算法结果展示
3.9本章小结
第四章 软件开发与算法评价
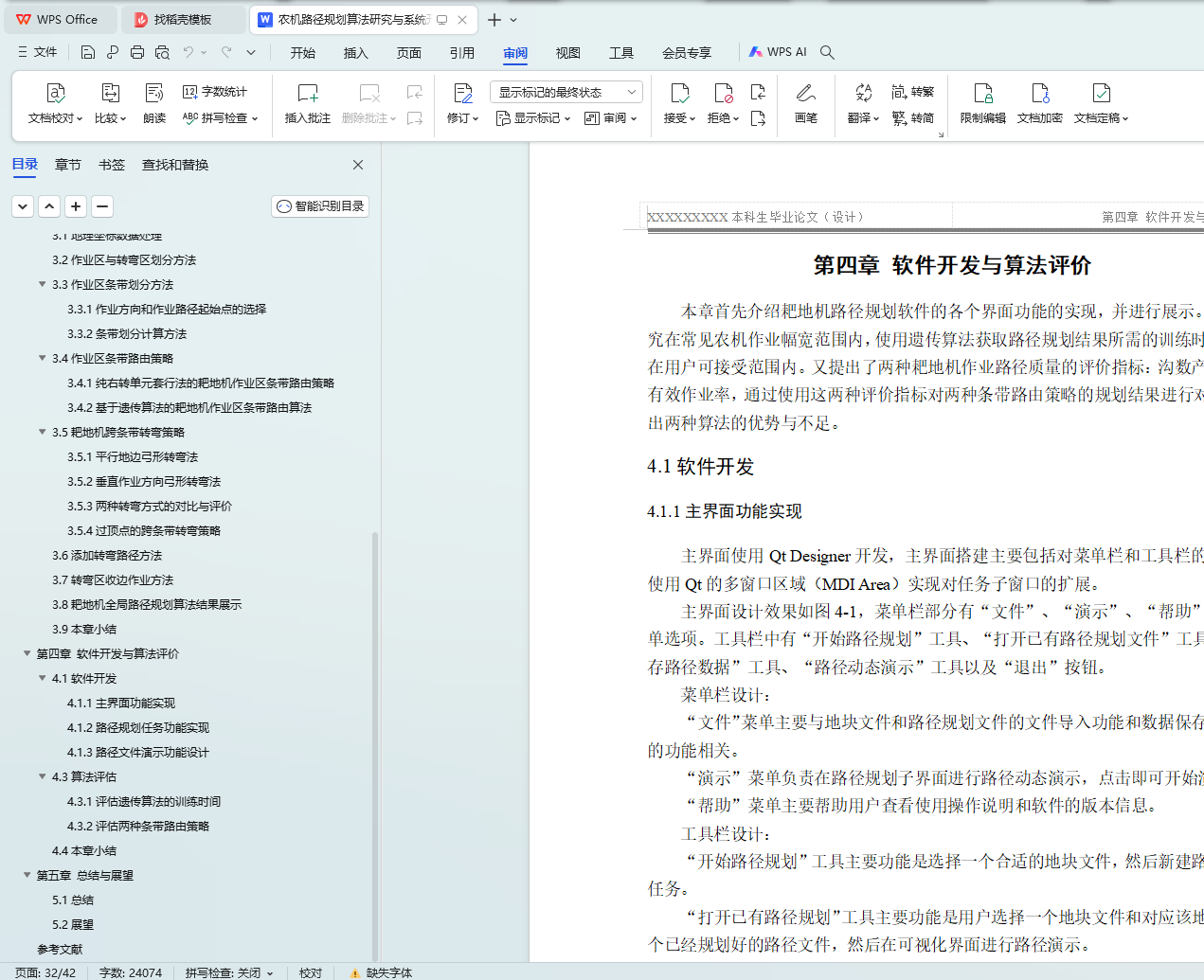
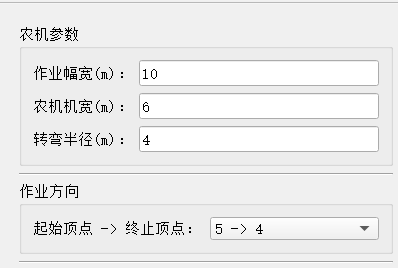
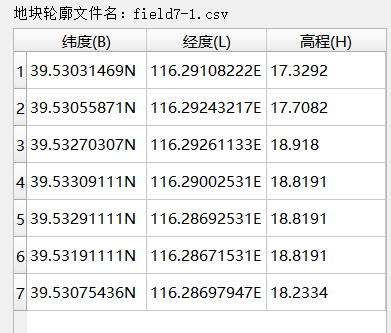
4.1软件开发
4.3算法评估
4.4本章小结
第五章 总结与展望
5.1总结
5.2展望
参考文献
致 谢