摘 要
四旋翼无人机应用范围不断扩大,对其飞行性能的要求也在不断提高。位置控制是四旋翼无人机飞行控制的核心内容之一,其位置控制模型具有非线性、耦合性、欠驱动的特点。本文以四旋翼无人机为对象,针对其位置控制特点进行控制算法设计和实现。论文分析四旋翼无人机的机械结构与运动方式,在此基础上建立四旋翼无人机数学模型。以此为基础,设计了模型预测控制器,并利用Simulink构建基于模型预测的四旋翼无人机位置控制系统,分别验证四旋翼无人机中加入模型预测控制器后进行定点控制及典型参考轨迹(锯齿形、正方形、圆形、“8”字形和螺旋形)的控制效果,仿真结果表明:模型预测控制能够保证四旋翼无人机位置控制的快速性和准确性。针对四旋翼无人机位置控制模型中因受干扰而引入非线性误差的问题,提出MPC和模型参考自适应控制结合的方案,设计了四旋翼无人机定点控制的自适应MPC控制器,在Simulink中加以仿真验证,结果表明自适应MPC能够同时解决四旋翼无人机位置控制中的最优控制问题和模型中存在的非线性误差问题。最后利用MATLAB的GUIDE工具箱,设计并实现四旋翼无人机位置控制仿真系统,该系统能够综合仿真MPC算法和自适应MPC算法在四旋翼无人机位置控制中的控制效果。本文的设计为四旋翼无人机位置控制提供了一种可行方案。
关键词:四旋翼无人机,位置控制,模型预测控制,自适应模型预测控制
Abstract
The application range of the quadrotor UAV is continuously expanding, and the requirements for its flying performance are also increasing. Position control is one of the core contents of quadrotor UAV flight control, its position control model has the characteristics of nonlinearity, coupling and underactuation. This paper takes quadrotor UAV as the object, designs and implements the controller algorithm according to its position control characteristics. The paper analyzes the mechanical structure and movement mode of the quadrotor UAV, and builds a mathematical model of the quadrotor UAV on this basis. Based on this, a model prediction controller is designed, and Simulink is used to build a quadrotor UAV position control system based on model prediction. (Zigzag, square, round, "8" shape and spiral) control results. The simulation results show that the model predictive control can ensure the speed and accuracy of the quadrotor UAV position control. Aiming at the problem of introducing nonlinear errors due to interference in the position control model of the quadrotor UAV, a scheme combining MPC and model reference adaptive control is proposed, and an adaptive MPC controller for fixed-point control of the quadrotor UAV is designed Simulation and verification in Simulink show that the adaptive MPC can simultaneously solve the optimal control problem in the position control of the quadcopter UAV and the nonlinear error problem in the model. Finally, the GUIDE toolbox of MATLAB is used to design and implement a quadrotor UAV position control simulation system, which can comprehensively simulate the control effect of the MPC algorithm and the adaptive MPC algorithm in the quadrotor UAV position control. The design of this paper provides a feasible solution for the position control of quadrotor UAV.
Key words: Quadrotor, Position control, Model predictive control, Adaptive model predictive control
目 录
第1章 绪论
1.1无人机发展历史
1.2课题背景及研究意义
1.3研究现状
1.4 文章结构
第2章 四旋翼无人机数学模型
2.1四旋翼无人机机械结构与运动方式
2.2坐标系与坐标变换
2.3四旋翼无人机数学模型
2.4本章小结
第3章 模型预测控制器设计
3.1模型预测控制的发展与应用
3.2模型预测控制简介
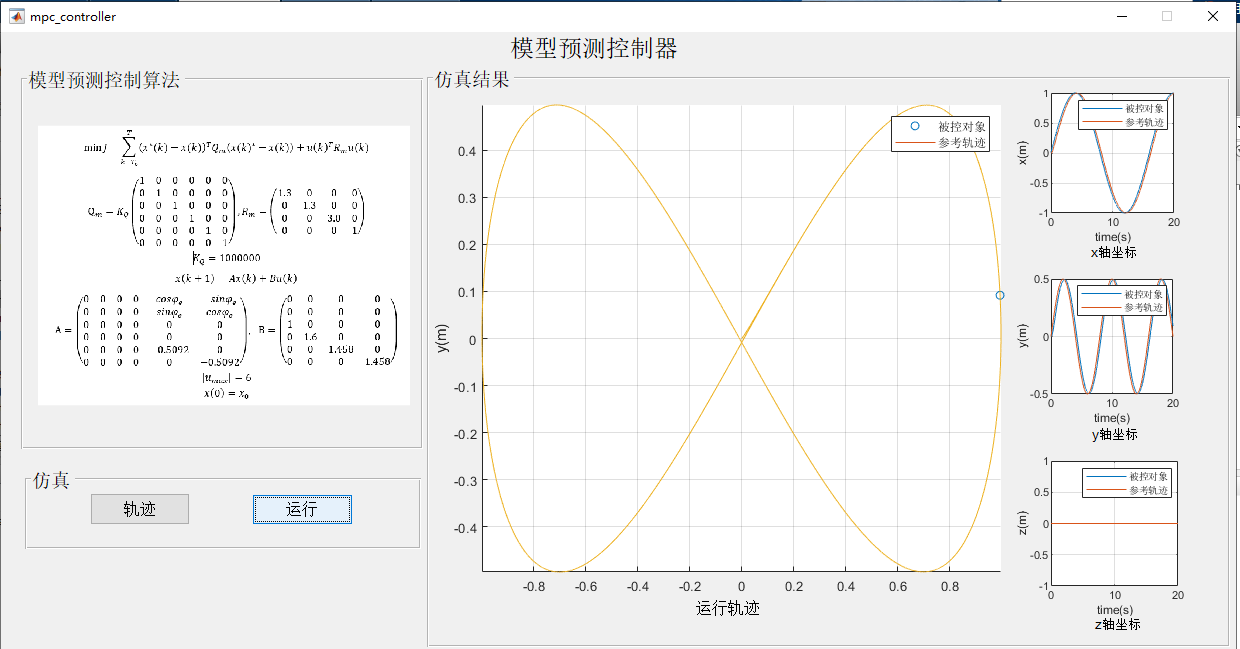
3.3模型预测控制器设计
3.4本章小节
第4章 四旋翼无人机位置控制仿真
4.1实验平台简介
4.2位置控制建模
4.3仿真结果
4.4本章小节
第5章 基于自适应模型预测的四旋翼无人机位置控制
5.1引言
5.2模型参考自适应控制简介
5.3控制器设计
5.4仿真结果对比
5.5 本章小结
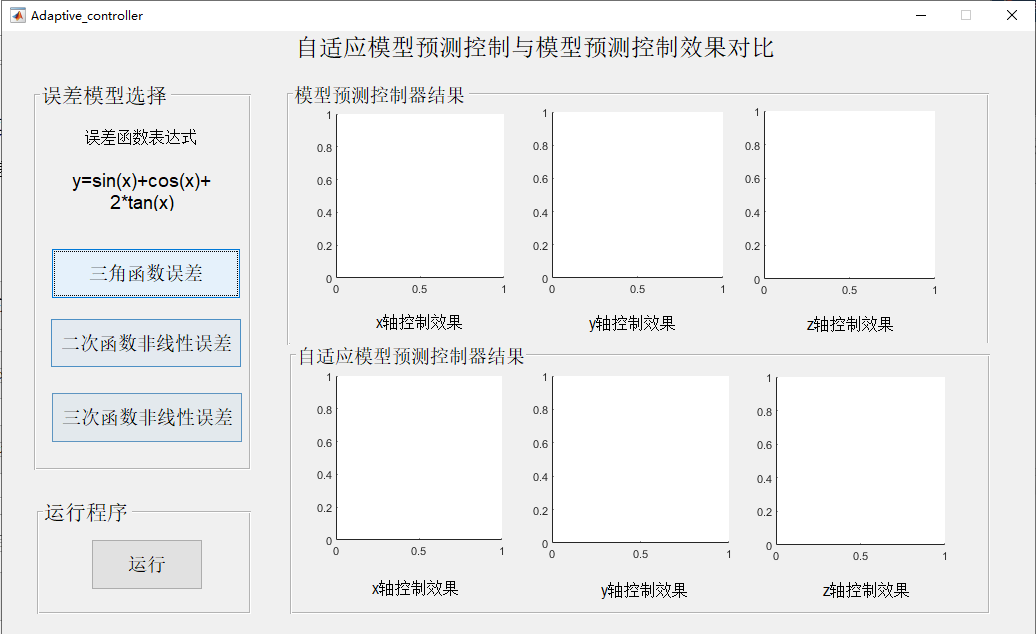
第6章 四旋翼无人机位置控制GUI设计
6.1MATLAB GUIDE工具箱简介
6.2四旋翼无人机位置控制GUI界面
6.3 本章小结
第7章 总结与展望
7.1工作总结
7.2未来展望
参考文献
致 谢
附录