摘 要
随着社会进步与科技发展,先进的工业机器人逐渐代替人工以实现制造业整体的自动化。但工业机器人技术的应用也面临很多难题,不同的工业机器人需要根据现场环境的特点做出相应改变。本课题针对制瓶行业的玻璃杯搬运生产线,设计一种玻璃杯搬运机器人,满足现场搬运的环境要求,能替人工搬运实现现场搬运生产线的自动化。
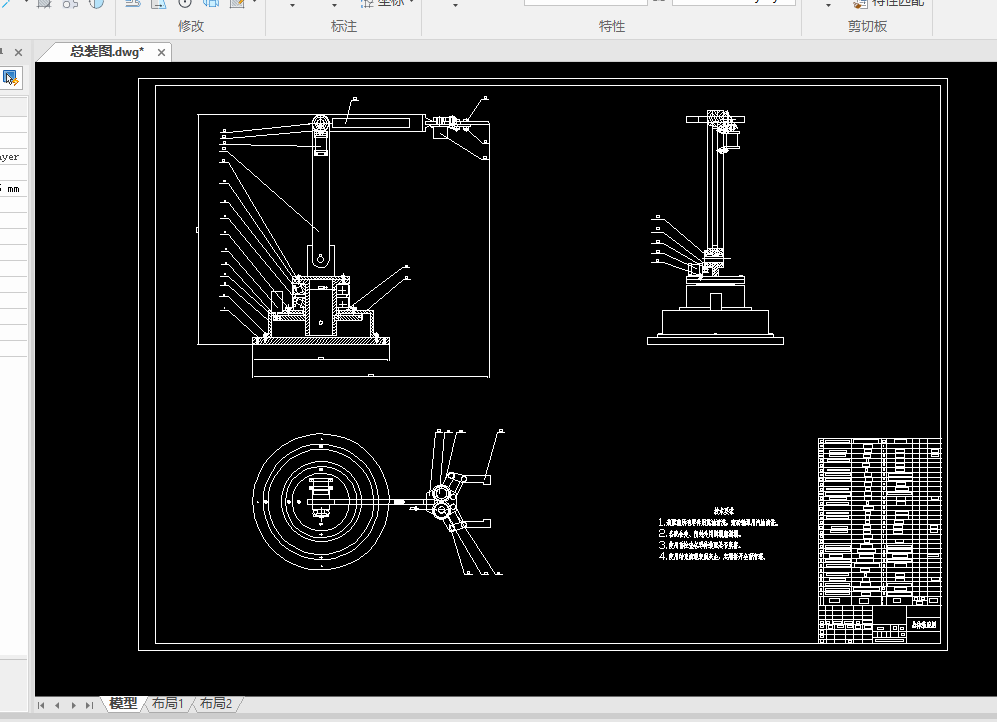
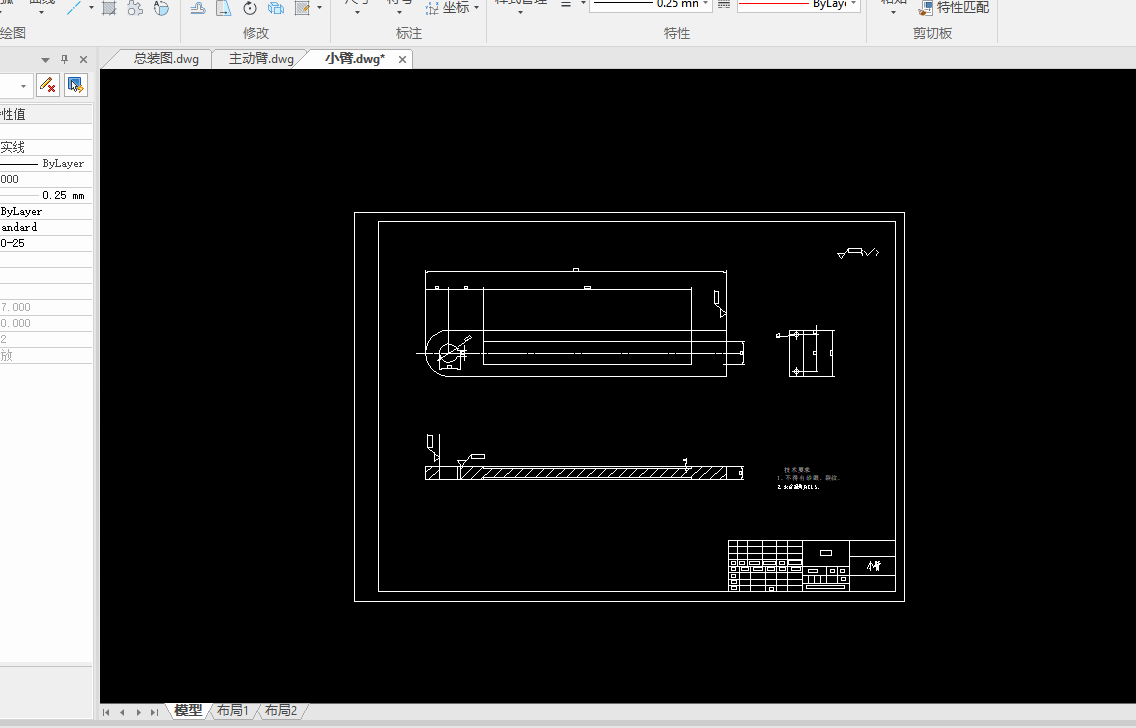
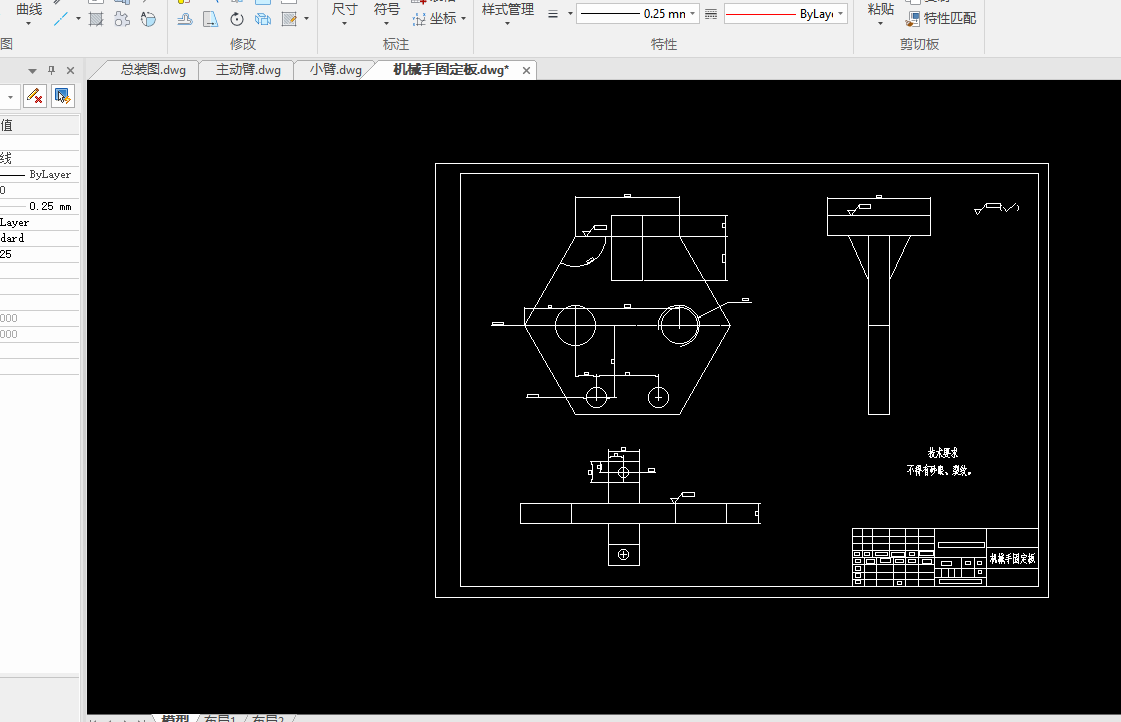
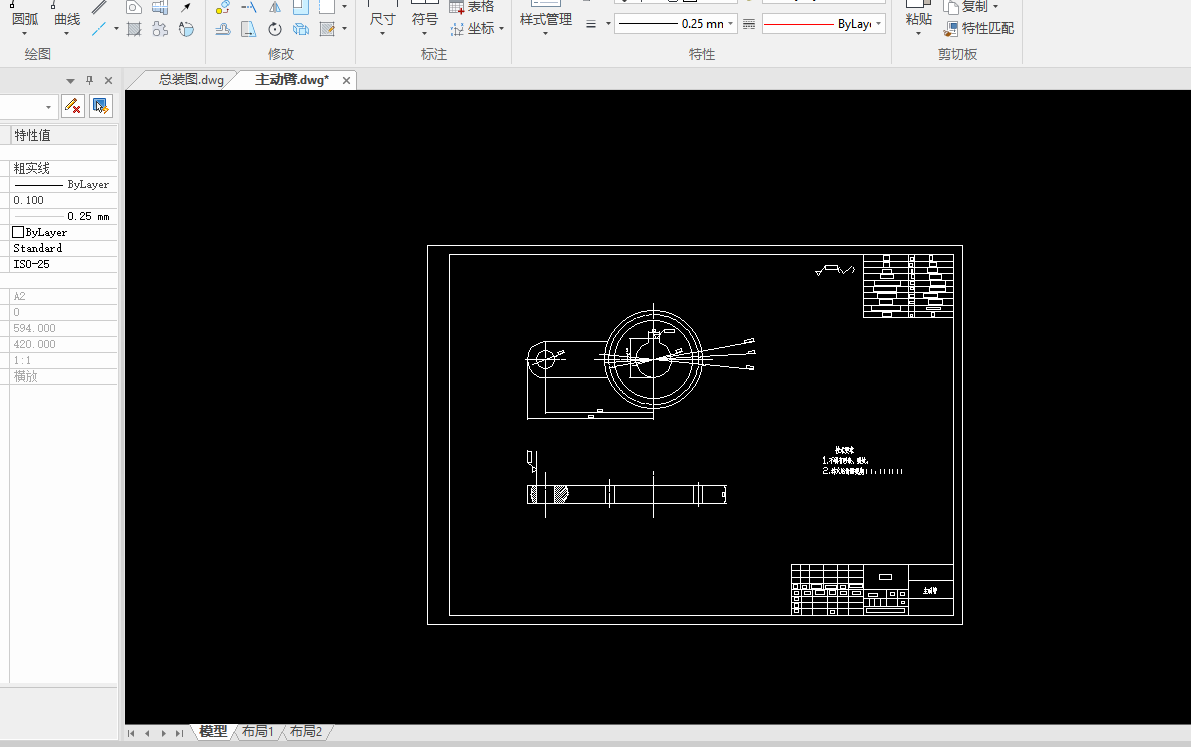
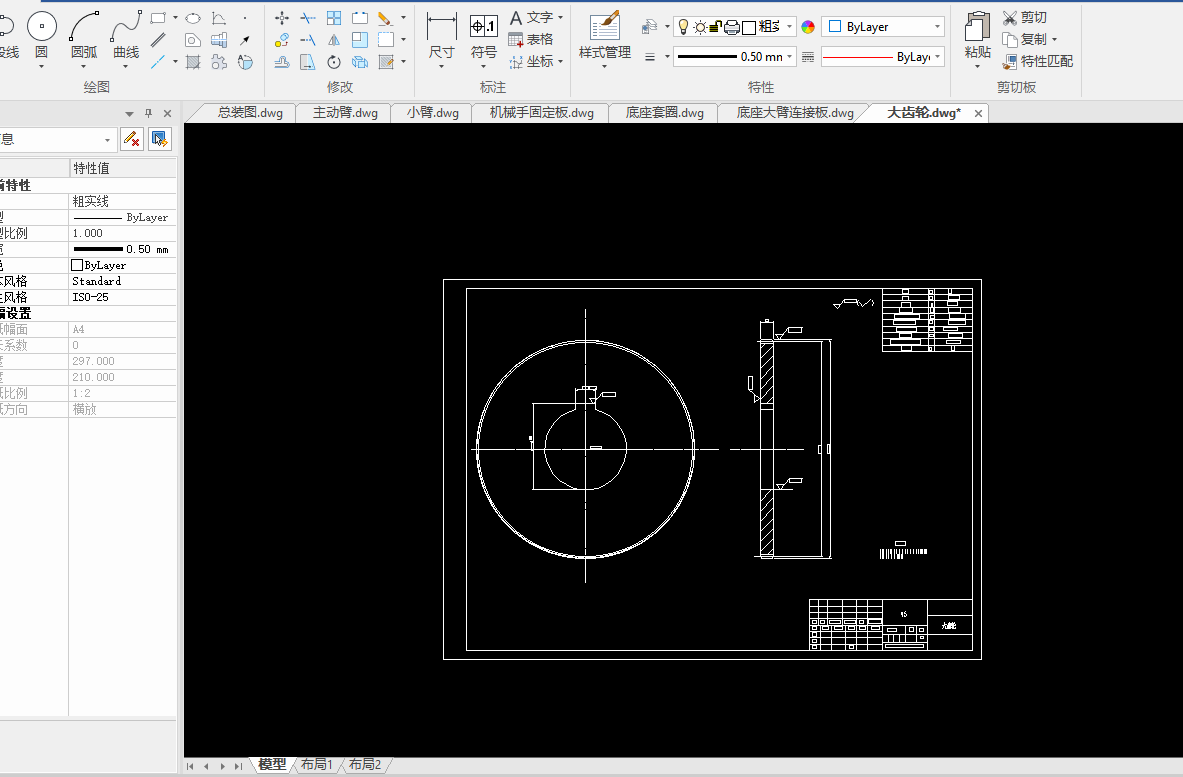
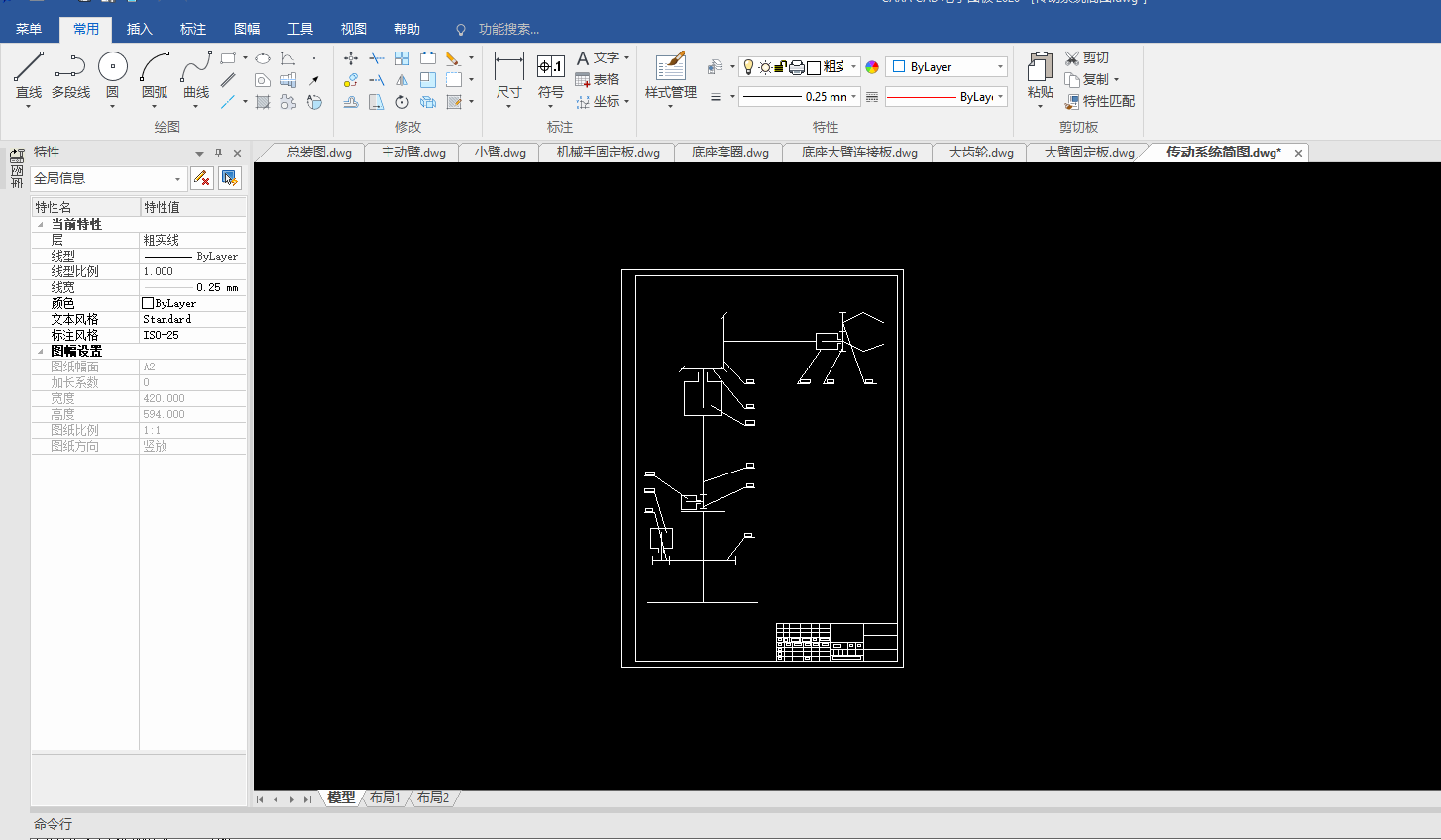
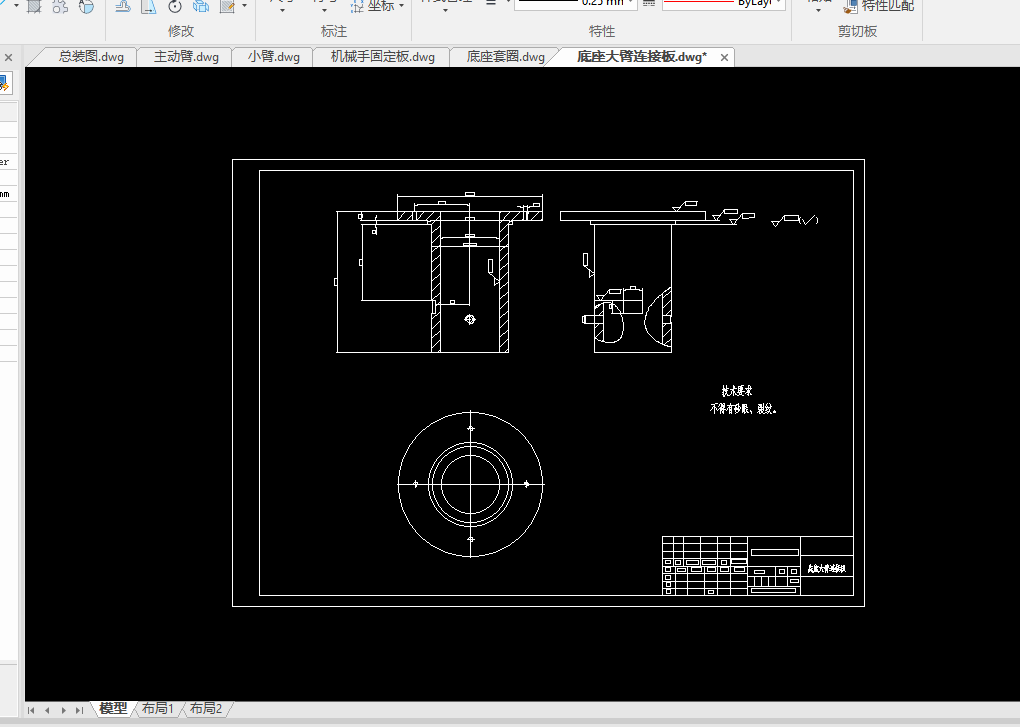
本文设计了一种玻璃杯搬运机器人,属于直角坐标机器人的一种。针对生产线及玻璃杯的特点,我们设计了一种3轴机器人,确定了其驱动方式和传动方式。我们详细设计了X、Y、Z轴及其相关参数,并在Proe/Solidwork完成了三维建模及装配,最后输出了关键部件的工程图纸。本文旨在提高玻璃杯搬运的效率和质量,同时降低人工操作的成本和风险。
关键词:玻璃杯搬运机器人;直角坐标机器人;3轴机器人;Solidwork;三维建模;
Abstract
With the progress of society and the development of science and technology, advanced industrial robots gradually replace artificial labor to realize the overall automation of the manufacturing industry. However, the application of industrial robot technology also faces many problems, and different industrial robots need to make corresponding changes according to the characteristics of the field environment. This topic aims at the glass handling production line in the bottle making industry, designing a glass handling robot to meet the environmental requirements of on-site handling and realize the automation of on-site handling production line for manual handling.
This paper designed a glass handling robot which belongs to a kind of right-angle coordinate robot. According to the characteristics of the production line and glasses, we designed a 3-axis robot to determine its driving mode and transmission mode. We designed the X, Y, Z axes and their related parameters in detail, and completed the 3 D modeling and assembly in Proe / Solidwork, and finally output the engineering drawings of key components. This paper aims to improve the efficiency and quality of glass handling while reducing the cost and risk of manual operation.
Key words: glass handling robot; rectangular coordinate robot; 3-axis robot; Solidwork; 3 d modeling;
目 录
摘 要
Abstract
第一章 绪 论
1.1选题背景及意义
1.2 搬运机器人的简史
1.3搬运机器人在生产中的应用
1.4本文主要研究内容
第二章 方案的确定与比较分析
2.1 机器人机械系统的比较与选择
2.2 机器人驱动系统的比较与选择
第三章 驱动源的选择与设计计算
3.1 主要技术参数的确定
3.2 各关节电机的选择计算
3.2.1 前臂旋转电机的选择
3.2.2 小臂旋转电机的选择
第四章 臂部的设计及有关计算
4.1 臂部设计的基本要求
4.2 前臂的典型机构以及结构的选择
4.2.1 前臂的典型运动机构
4.2.2 前臂运动机构的选择
4.3 前臂直线运动的驱动力计算
4.3.1 前臂摩擦力的分析与计算
4.3.2 前臂惯性力的计算
4.3.3连接部分的摩擦阻力
第五章 底座的设计计算
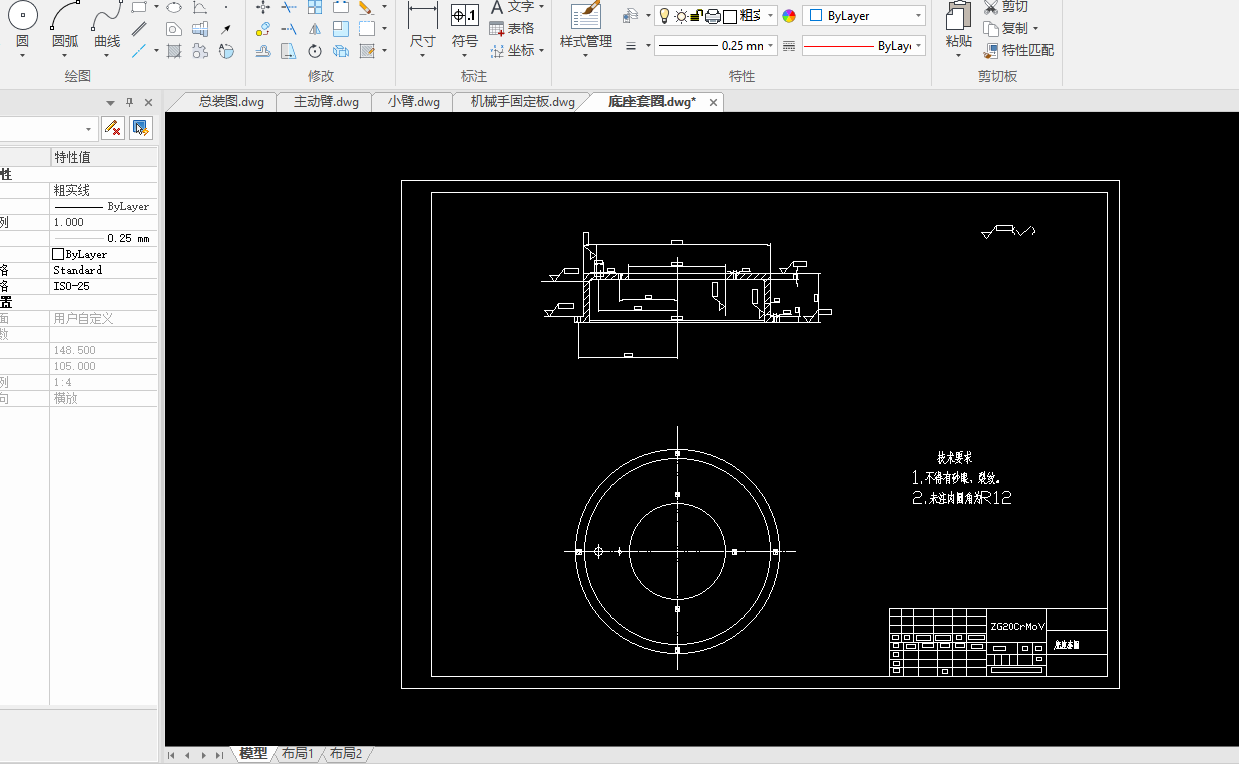
5.1 底座的整体设计
5.2 机身回转机构的工作原理
第六章 各机械部件的设计选择与校核
6.1 轴的设计与校核
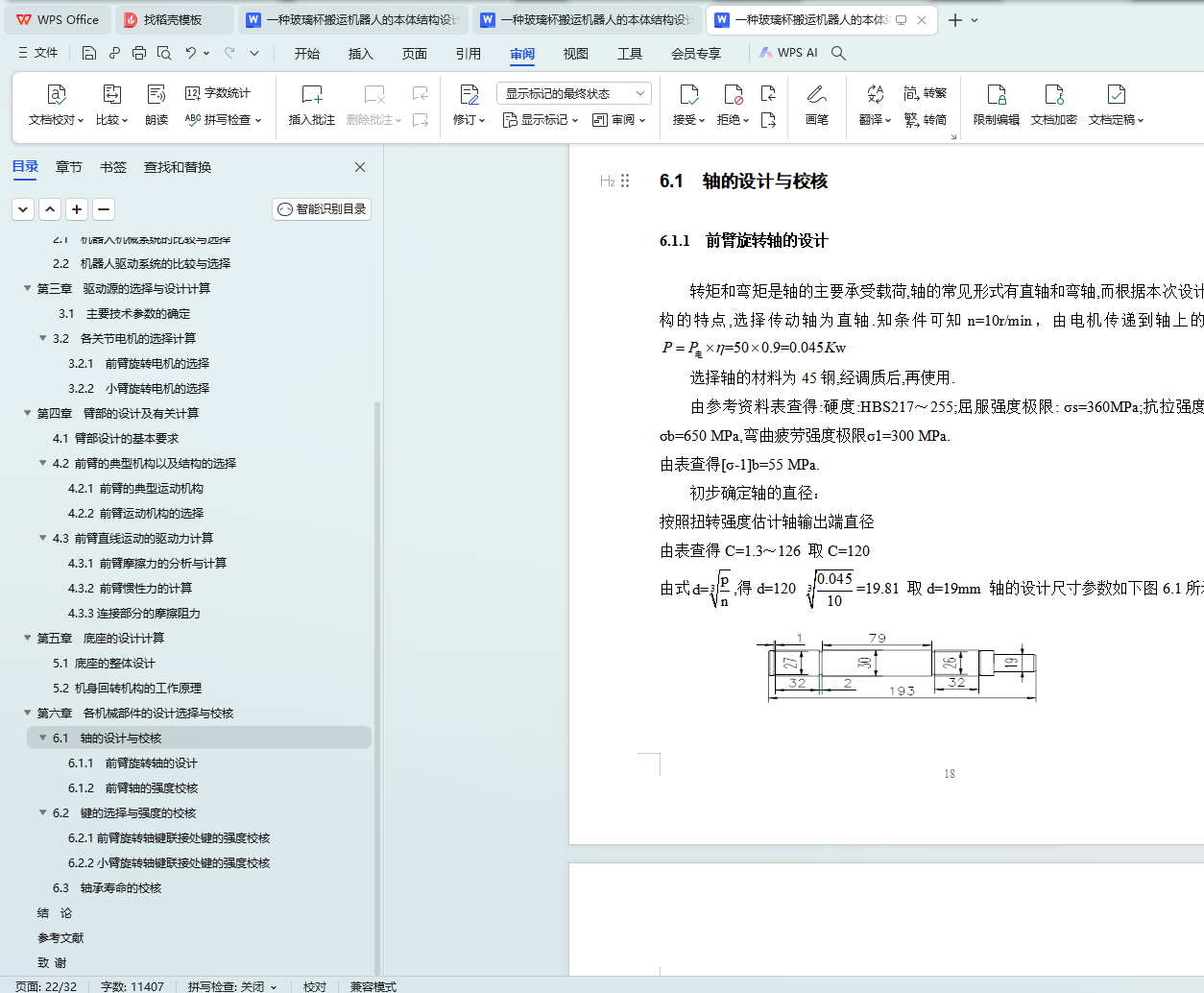
6.1.1 前臂旋转轴的设计
6.1.2 前臂轴的强度校核
6.2 键的选择与强度的校核
6.2.1前臂旋转轴键联接处键的强度校核
6.2.2小臂旋转轴键联接处键的强度校核
6.3 轴承寿命的校核
结 论
参考文献
致 谢