目录
1绪论 1
1.1研究内容及意义 1
1.2研究现状 1
1.3机械手 3
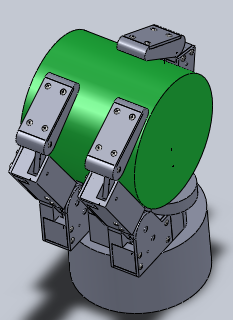
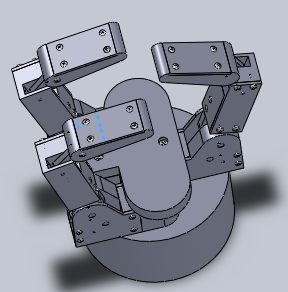
2机械手的设计 5
2.1设计方案 5
2.2手指数量 5
2.3手指关节数量 5
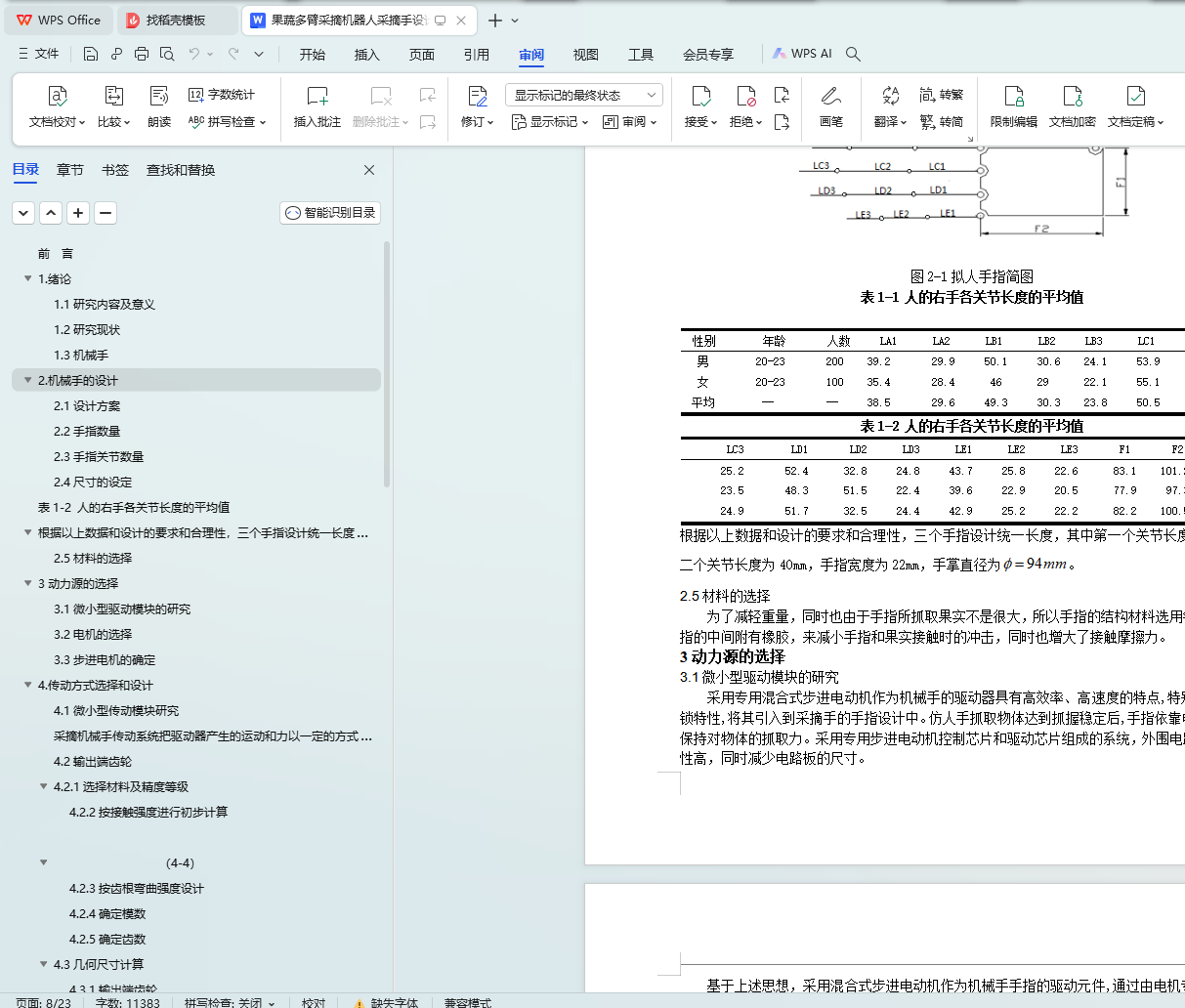
2.4尺寸的设定 6
2.5材料的选择 6
3动力源的选择 6
3.1微小型驱动模块的研究 6
3.2电机的选择 7
3.3步进电机的确定 8
4传动方式选择和设计 8
4.1微小型传动模块研究
4.2输出端齿轮
4.3几何尺寸计算 10
5零件设计 11
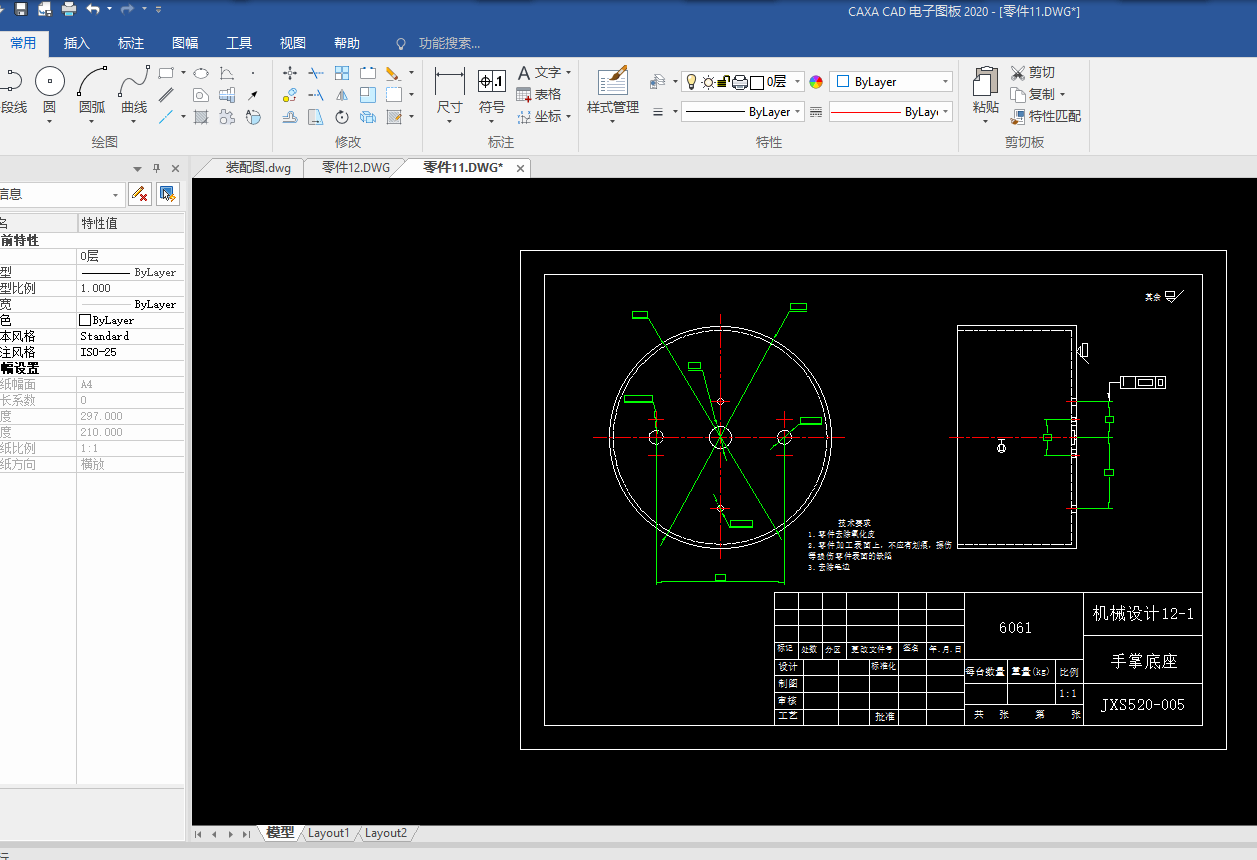
5.1手掌的设计 11
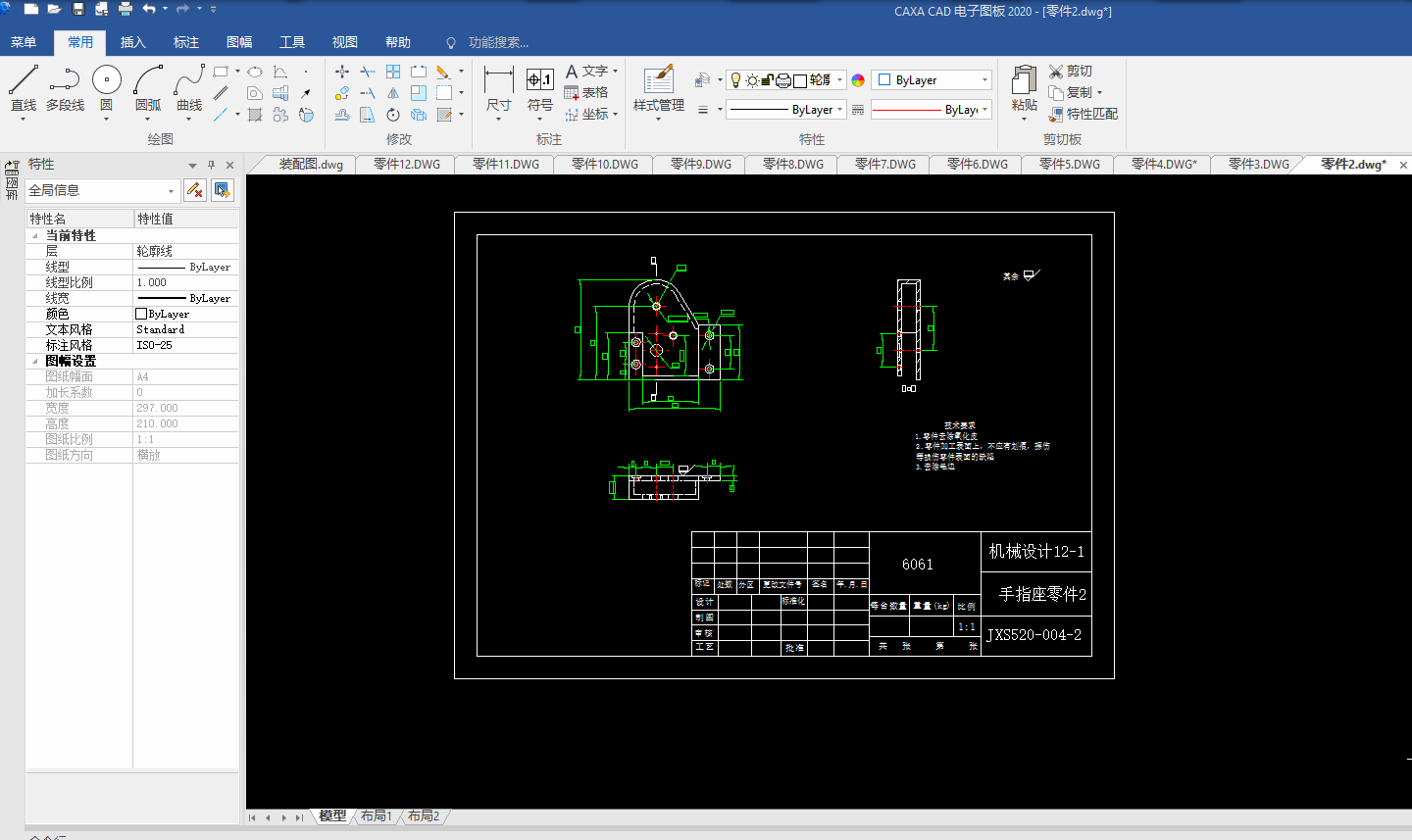
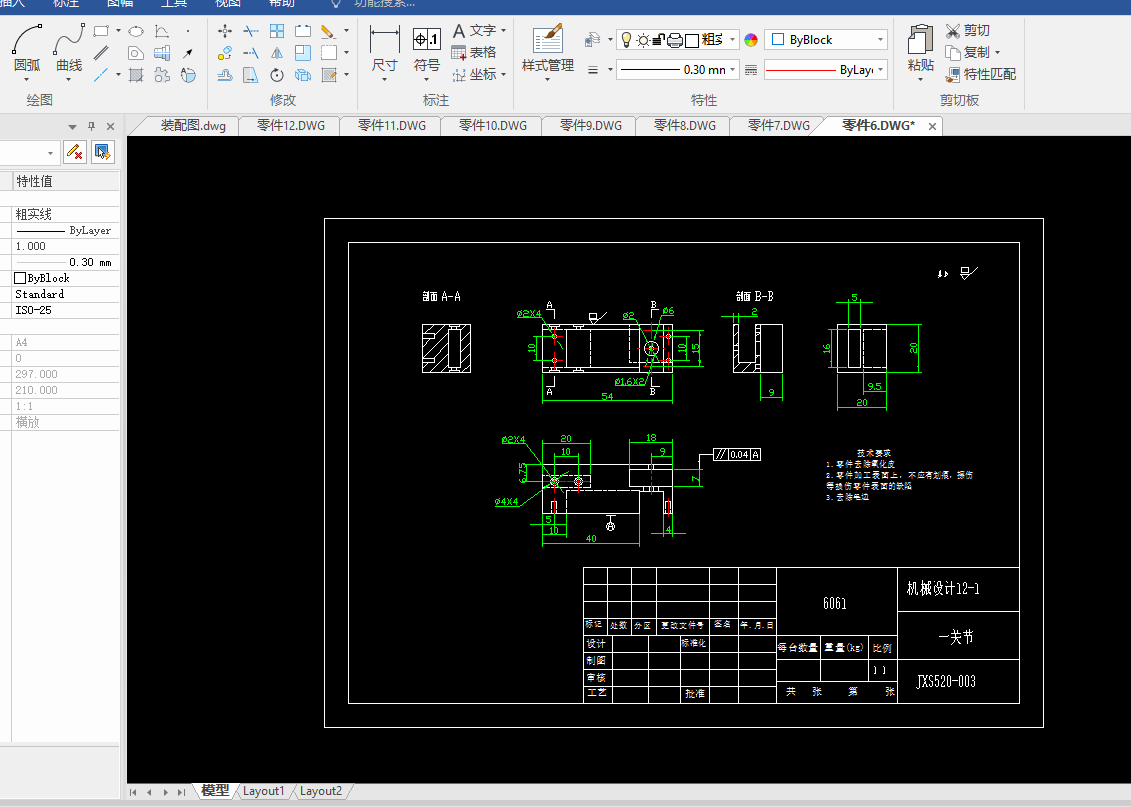
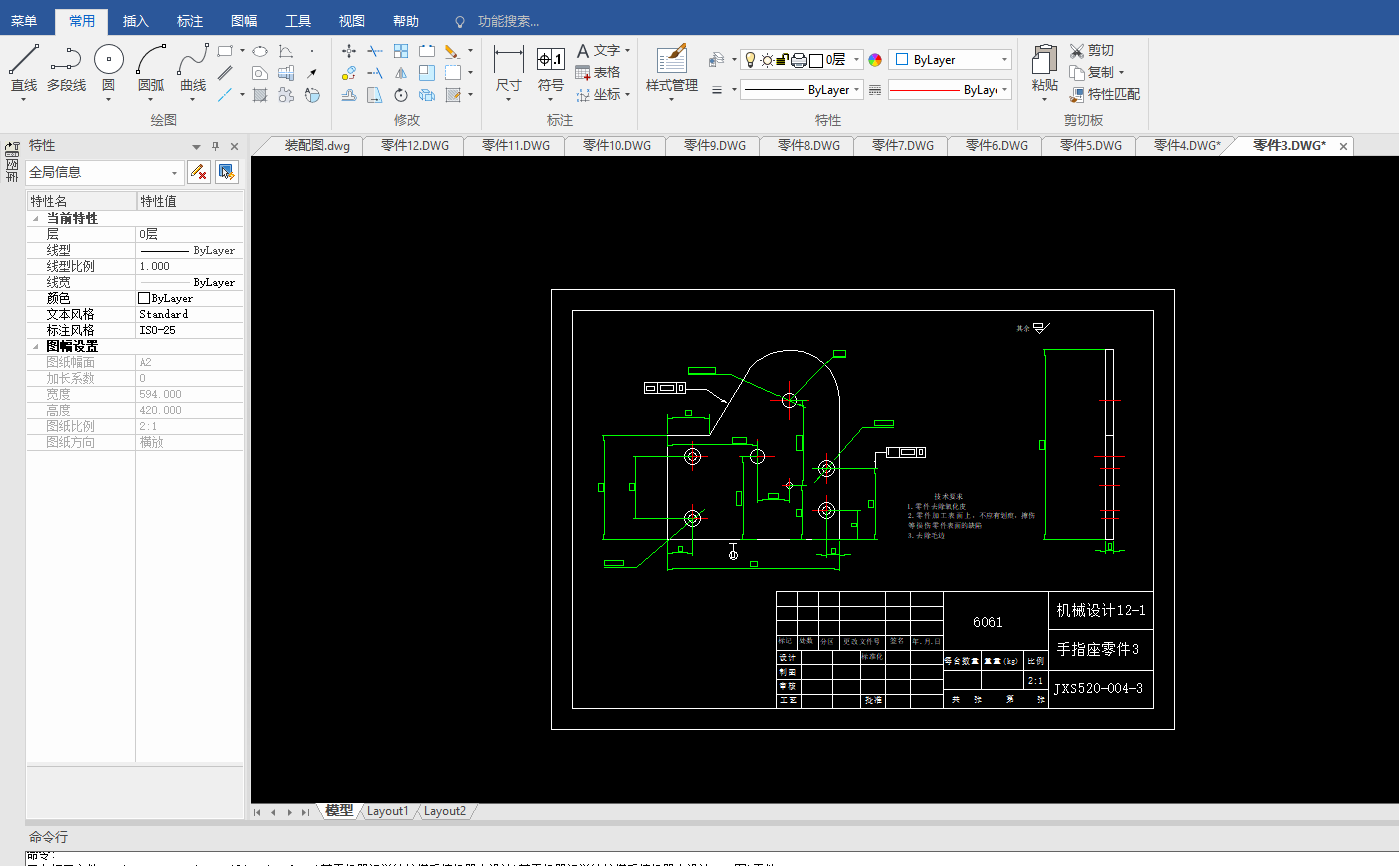
5.2手指底座 12
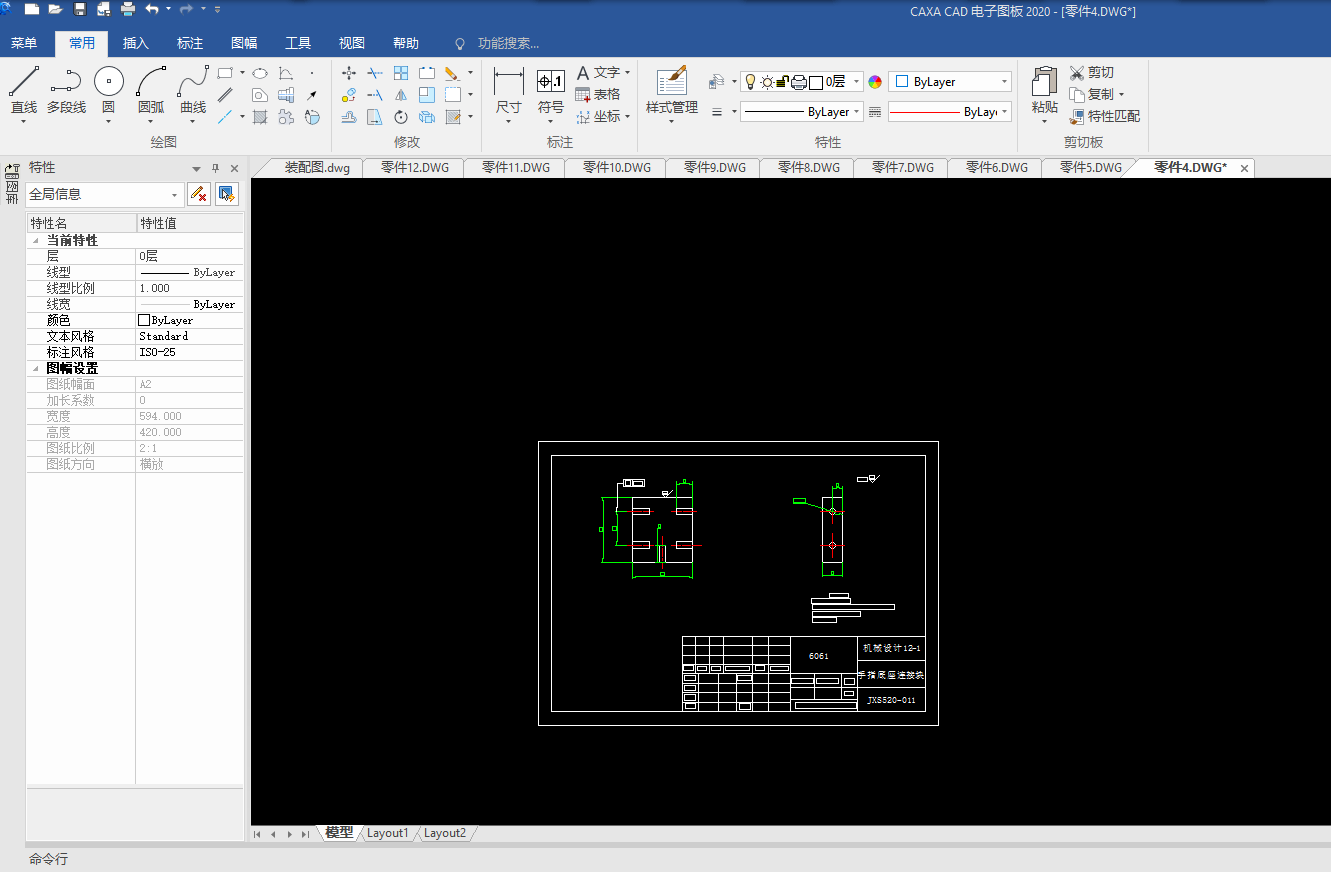
5.3第一个指节 12
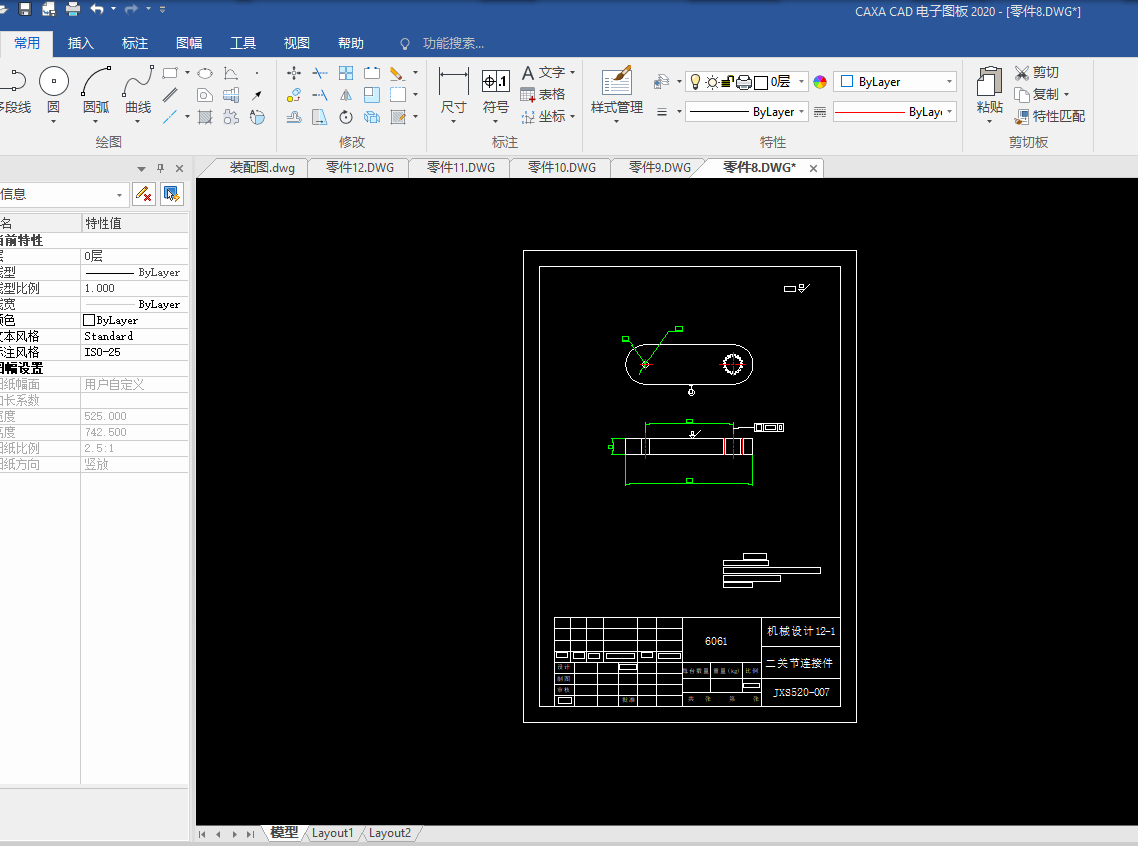
5.4第二个指节 13
6其他硬件系统 14
6.1传感器 14
6.2单片机 15
6.3图像识别系统 15
7工作原理流程及形态 15
7.1工作原理 16
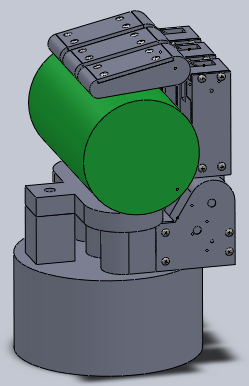
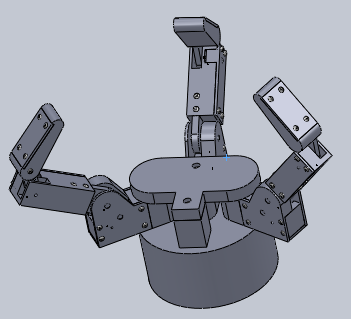
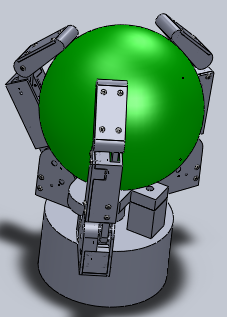
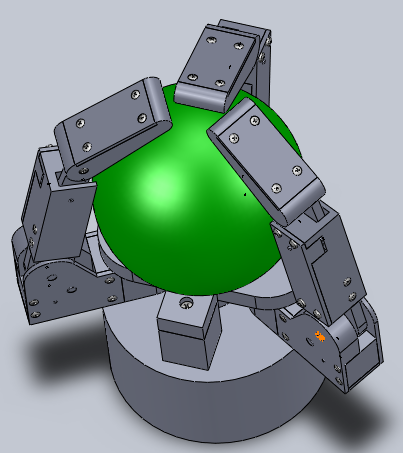
7.2工作形态 16
小 结 19
致 谢 20
参考文献....................................................................................................................................................21
前 言
随着电子计算机和自动控制技术的迅速发展、农业高新科技的应用和推广,农业机器人已逐步进入到农业生产领域中,并将促进现代农业向着装备机械化、生产智能化的方向发展。果蔬采摘是农业生产中季节性强、劳动强度大、作业要求高的一个重要环节,研究和开发果蔬采摘的智能机器人技术对于解放劳动力、提高劳动生产效率、降低生产成本、保证新鲜果蔬品质,以及满足作物生长的实时性要求等方面都有着重要的意义。
工业领域是机器人技术的传统应用领域,目前已经得到了相当成熟的应用; 而采摘机器人工作在高度非结构化的复杂环境下,作业对象是有生命力的新鲜水果或蔬菜。同工业机器人相比,采摘机器人具有以下的特点: ① 作业对象娇嫩、形状复杂且个体状况之间的差异性大,需要从机器人结构、传感器、控制系统等方面加以协调和控制; ② 采摘对象具有随机分布性,大多被树叶、树枝等掩盖,增大了机器人视觉定位难度,使得采摘速度和成功率降低,同时对机械手的避障提出了更高的要求; ③ 采摘机器人工作在非结构化的环境下,环境条件随着季节、天气的变化而发生变化,环境信息完全是未知的、开放的,要求机器人在视觉、知识推理和判断等方面有相当高的智能; ④ 采摘对象是有生命的、脆弱的生物体,要求在采摘过程中对果实无任何损伤,从而需要机器人的末端执行器具有柔顺性和灵巧性; ⑤ 高智能导致高成本,农民或农业经营者无法接受,并且采摘机器人的使用具有短时间、季节性、利用率不高的缺点,是限制采摘机器人推广使用的重要因素; ⑥ 果蔬采摘机器人的操作者是农民,不是具有机电知识的工程师,因此要求果蔬采摘机器人必须具有高可靠性和操作简单、界面友好的特点。
根据设计任务和设计要求,主要针对机械手部分进行机械方面的设计。由于设计者水平有限,本设计中难免有误漏欠妥之处,恳请老师们批评指正。