摘 要
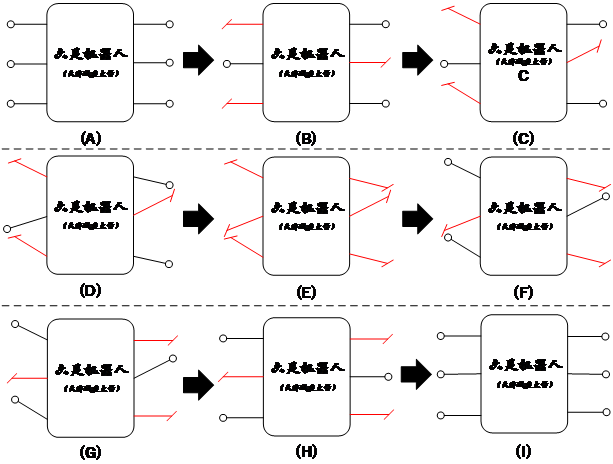
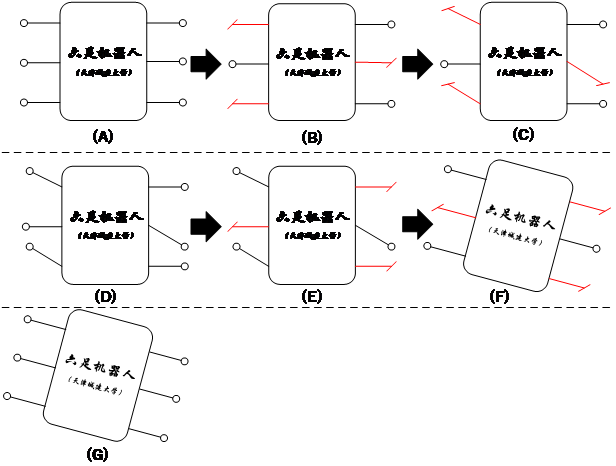
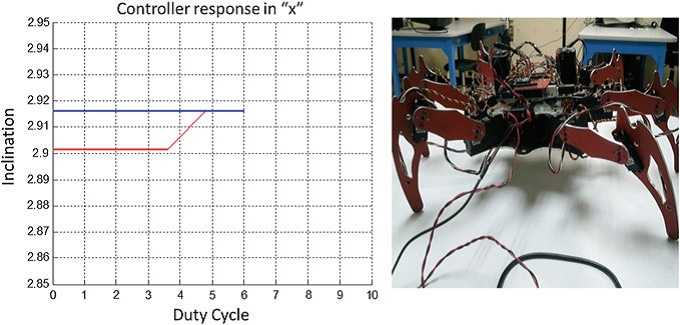
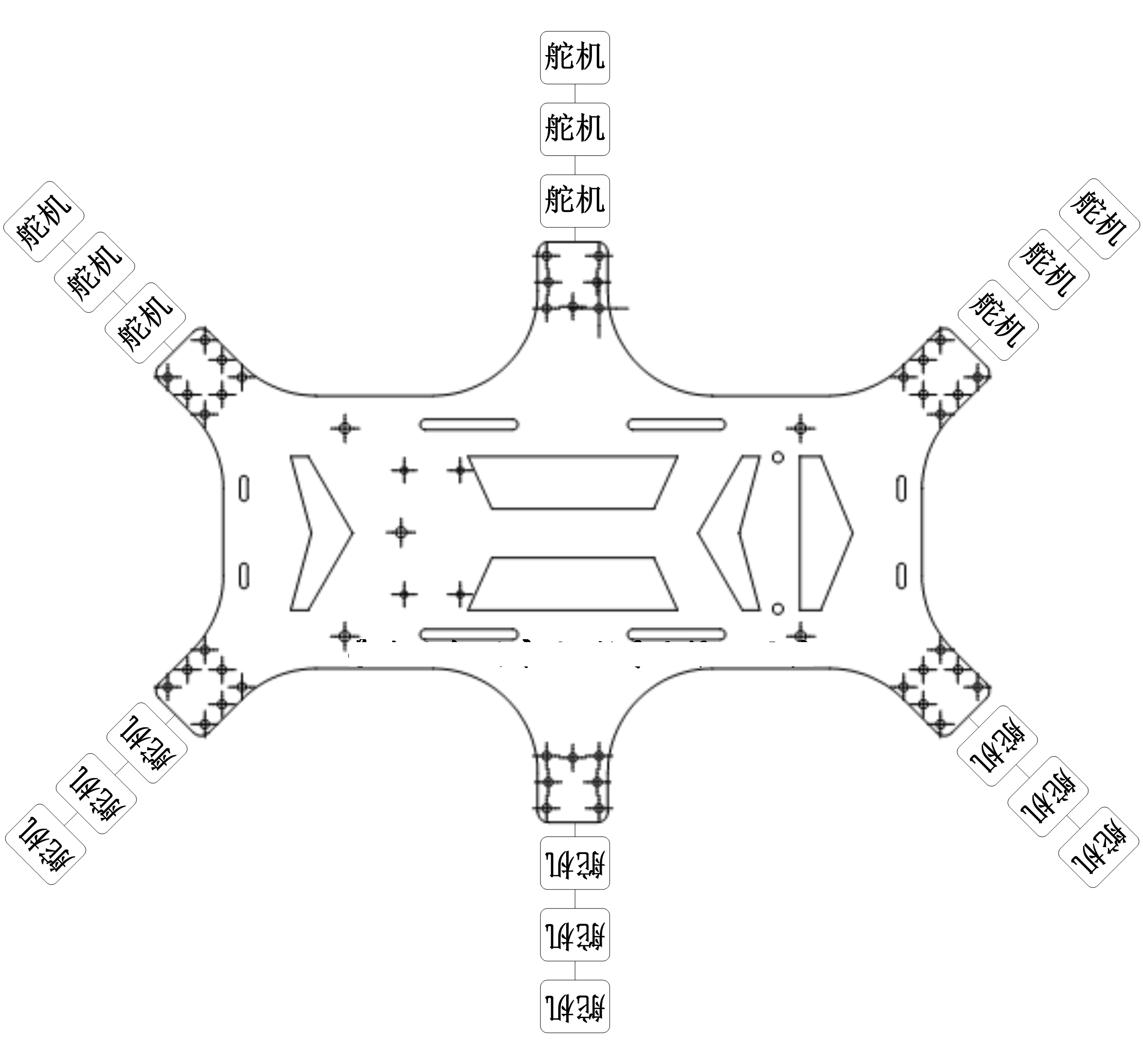
本设计主要是基于单片机的六足机器人控制系统设计,综合分析六足机器人的结构、步态和控制算法,结合云端服务器、WIFI技术、蓝牙技术、语音识别技术和手势识别技术进行多种控制模式的设计,并提出不同应用场景的不同构建方案。
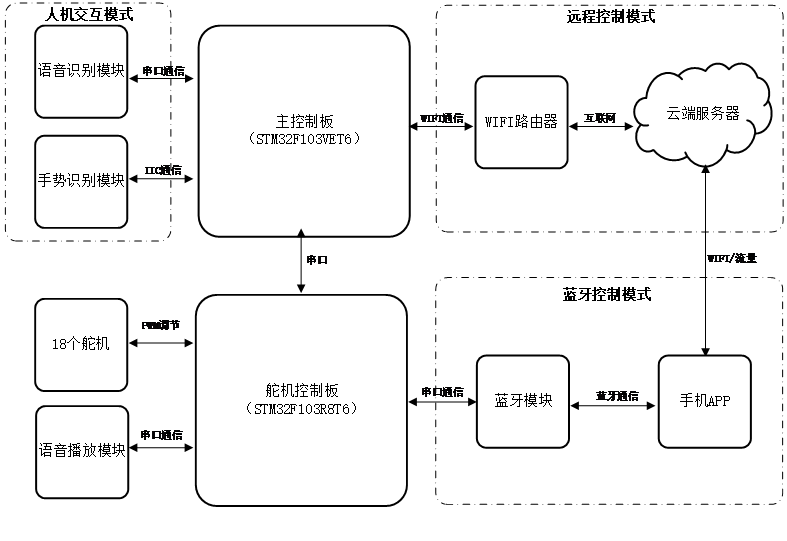
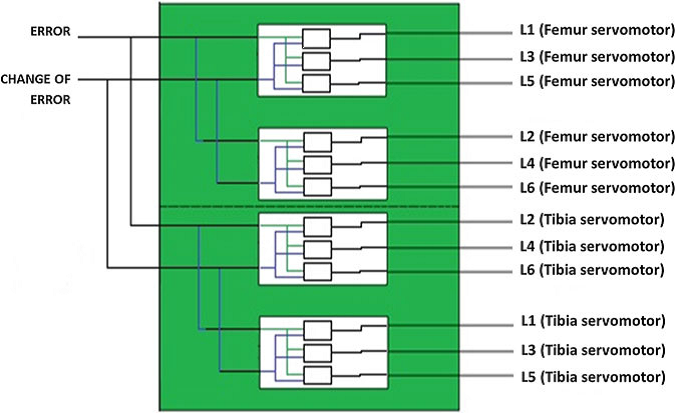
本系统的硬件设计分为主控板和舵机控制板两部分。主控板主要负责各种控制模式的数据处理和显示,舵机控制板主要负责舵机转动角度的控制,两板通过串口进行数据的交互。主控制板采用STM32F103VET6芯片,舵机控制板采用STM32F103R8T6芯片,两者都基于ARM的Cortex M3内核进行设计的。主控制板的硬件电路设计主要有启动电路、晶振电路、下载电路、复位电路、稳压电路以及各个模块接口电路。在Altium Designer16软件中进行原理图的绘制和PCB的绘制,打样后进行焊接并完成整体的测试。
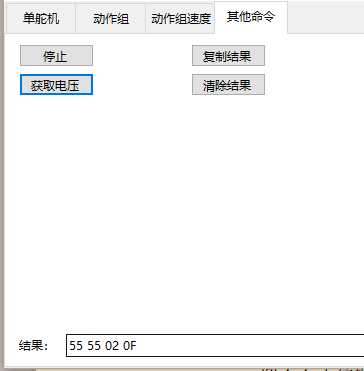
本系统的上位机主要是手机APP,其开发环境是Android Studio,采用C#作为云端开放平台语言,JAVA语言作为移动客户端设计语言,通过JAVA语言的编写实现手机客户端的数据接收和发送,最终实现基于云端和蓝牙的控制系统上位机板块的设计。本系统下位机的软件设计是在Keil5编程环境下进行的,参考STM32F1的手册和各个模块的数据手册进行程序的编写,最终实现云端控制、蓝牙控制、语音控制和手势控制这四种控制系统设计。
关键词:六足机器人;PWM调节;单片机;云端
ABSTRACT
This design is mainly based on the design of hexapod robot control system based on single-chip microcomputer. It comprehensively analyzes the structure, gait and control algorithm of six-legged robots. It combines cloud server, WIFI technology, Bluetooth technology, speech recognition technology and GESTURE recognition technology to perform various control MODEs. Of the design and propose different collocation schemes for different application scenarios.
The hardware design of this system is divided into two parts: the main control board and the servo control board. The main control board is mainly responsible for DATA processing and display of various control MODEs. The servo control board is mainly responsible for the control of the steering angle of the servo, and the two boards interact with each other through the serial port. The main control board uses STM32F103VET6 chips, and the servo control board uses STM32F103R8T6 chips, both of which are designed based on the ARM Cortex M3 core. The hardware circuit design of the main control board mainly includes the startup circuit, the crystal oscillator circuit, the download circuit, the reset circuit, the voltage stabilization circuit, and the interface circuit of each module. The drawing of the schematic and the drawing of the PCB are done in the Altium Designer 16 software. Welding is done after proofing and the overall TEST is completed.
The host computer of this system is mainly a mobile phone APP. Its development environment is Android Studio. It uses C# as a cloud open platform language and JAVA language as a mobile client design language. Through the JAVA language, it realizes the DATA receiving and SENDing of the mobile client, and finally realizes. Cloud-based and Bluetooth-based control system PC board design. The software design of the lower computer of this system is carried out under the Keil5 programming environment. Refer to the STM32F1 manual and the DATA manual of each module to program the program. Finally realize the four control system design of cloud control, Bluetooth control, voice control and GESTURE control.
Key words:six-legged robot; PWM regulation; single chip computer; cloud