本文出处: 设计智能系统的混合方法的最新进展,计算智能研究547
施普林格国际出版社瑞士2014年
六足机器人模糊控制器的设计
Roberto Sepúlveda, Oscar Montiel, Rodolfo Reyesand Josué Domínguez
摘要:有足机器人的出现是因为需要有能够在自然或非结构化地形上行驶和安全地进入的车辆,这些对于传统行驶系统的车辆(如车轮)无法进入,或者如果他们能够成功进入,效率也非常低下。然而,尽管移动机器人具有腿有一定的优点,但仍然存在妨碍其使用的限制,诸如腿的移动控制,运动算法,轨迹跟踪和障碍避免等等。 在我们的生活中,用于控制系统且非常有用的替代方法是模糊逻辑,这个能够建模数学复杂的系统。因此,模糊逻辑已经在复杂和非线性工厂的控制系统中变得流行。这项工作的目的是制定算法来控制六足机器人身体。这些算法的发展可运用于控制机器人的伺服电机的模糊逻辑技术。Matlab算法是利用ZigBee通信协议来建立无线通信的,并且我们使用Matlab的遗传算法工具箱来对“x-y”平面上的六足机器人本体进行控制, 由于机器人身体在“x”中的稳定以及机器人身体在“y”中的稳定而导致的客观优化问题。
1. 介绍
移动机器人提供了在不同地形中导航的能力,并拥有矿物勘探、行星探测、搜索和救援任务、危险的垃圾清理、自动化过程、警戒、地形识别和移动平台的应用。
多年来,传统的控制技术,如PID,尽管在工业中有很大的用处,但涉及控制器设计的数学一直是一个很大的缺点,因为很难模拟许多实际系统。
传统的控制系统方法需要一个系统的先验模型。模型的质量,也就是说,线性化中的精度损失和/或系统参数的不确定性会影响最终控制的质量。此外,模糊逻辑等软计算方法具有非线性映射能力,不需要分析模型,可以处理系统参数的不确定性。
基于人类思想的本质,Lotfi Zadeh在1965年提出了“模糊逻辑”。模糊逻辑用于处理不精确或不确定性的问题。基于模糊逻辑的模糊集理论,提出一个元素在一定程度上属于一个集合。因此,让我们把知识转换成规则的形式并由计算机处理是可行的。
在[3-5]等研究中,研究了具有运动链和控制技术的六足机器人;在[6,7]中,提出了一种利用自适应控制器在不平坦地形上行走的六足机器人。
Ma˘noi-Olaru和Nitulescu在[8]和[9]中提到,在这些类型的机器人中,关节机器人的运动是最困难的任务,用于控制和协调腿部的模糊逻辑、人工神经网络或中央模式发生器都可以使用。Sakr和Petriu在[10]中提出了一种六足机器人的模糊逻辑控制器,它可以在不倾斜的情况下在不规则表面上移动。在[11]中,一套算法允许六足步行机器人通过动作来执行它的运动,而不是用模糊逻辑技术来做决定。
在[12]中,提出了一套模糊逻辑算法,该算法允许六足机器人使用被称为自由运动的方法来实现双腿的移动。在[13]中,提出了一种应用于六足机器人数学模型的模糊系统中的模糊规则的构造方法,其结果是可以有效地减少试错的努力来生成规则,建立这些规则 一直是这类系统设计中的一个重要课题,它们的开发可能会延迟很长时间。
2. 机器人和软计算技术
在这项工作中,我们展示了一个用六条腿铰接的移动机器人的研究; 它们中的每一条腿都是由三个旋转关节组成,即三个自由度; 除了分析机器人的运动外,还设计了一个控制器,使用模糊控制器将其稳定在轴“x”和“y”中。
对于哪些机器可以被视为机器人没有共识,但是有专家和公众就机器人的具体任务达成的一致意见:移动,操作机械手臂,感知和操纵他们的环境并展示智能行为。目前,一般来说,可以认为机器人是具有移动能力的计算机; 它可以通过编程开发多个任务。
移动机器人顾名思义就是可以移动的机器人,有不同类型的移动机器人(轮式,水上,空中等)。在移动机器人中,突出了两足机器人,四足机器人,六足机器人,章鱼机器人,混合机器人(腿和轮)和其他腿式机器人。
六足机器人模仿了四肢的结构和节肢动物或动物的运动控制,它们可以在非结构化的地形中行走,获得成功的可能性很高,即使其中一个是迷路的。这些重要的优势使得这些机器人在野外勘探、太空探索、灾难地区、挖掘和其他许多应用领域中得到了可靠的应用[14]。
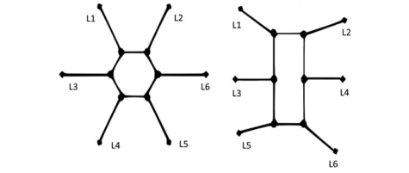
六足机器人可分为矩形和六角形,如图1所示。矩形形状的灵感来源于六边形昆虫,其六边形昆虫具有沿其两侧对称分布的六条腿。六角形六足体有六条腿对称地分布在身体周围(可以是六角形或圆形)。通常情况下,单腿有两到六个自由度[15]。
2.1模糊控制
模糊逻辑被认为是集合的一般理论的一般化,它允许一个宇宙的元素在一个具有特征函数的集合中具有中等程度的隶属度。这个想法改变了布尔逻辑的矛盾(0和1 s)概念,这恰好是模糊集合的特例[16]。
模糊逻辑理论已经生成了知识的表示模型; 由于模糊系统的简单设计以及用该逻辑进行的控制和决策所实现的高度准确性,它还简化了具有非线性特性的控制系统中的人类专业知识,从而彻底改变了家电市场。
应用领域包括但不限于:人机通信,医药,机器人,自然资源的研究和估计,信号和图像分析,控制系统,电器和计算机。
图1六足机器人的分类
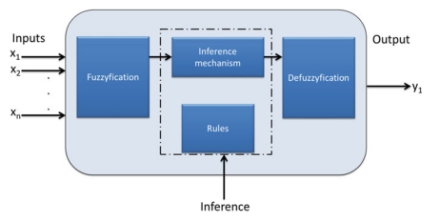
图2具有“n”个输入和一个输出的模糊推理系统
(注释:Inputs:输入;Output:输出;Inference:推论)
模糊控制系统根据待解决问题的性质而有所不同;控制问题可能与典型的机器人一样复杂,需要协调操作,以及简单的任务,例如维护给定变量的预定义状态。这些系统能够使用人类的知识,这对于建立精确的数学模型是困难的或者有时不可能的控制问题是至关重要的,典型的模糊推理系统如图2所示[17]。
图3 FIS控制“x”中的位置的框56FE
(注释:Setpoint desired:期望的设定点;Setpoint get:得到设定值)
3. 控制算法的设计与实现
在这项工作中,有人开发了算法来控制一个六足机器人身体的位置,“x-y”轴上的自由度(问题是一次解决两个目标); 因此,提出了两种能够使用加速度计作为传感器来控制机器人的模糊控制器,从而允许知道机器人身体在两个轴上的位置,首先设计模糊控制器以控制六足机器人的主体 'x'轴,然后是'y'轴。
所设计的控制算法无法同时控制机器人在两个轴上的位置,因此需要使用演化算法来为这个多目标优化问题提供解决方案。
3.1“x”轴的模糊控制
最终的目的是根据人体所需的位置值来控制六足机器人的位置; 控制器必须补偿响应并对输出进行必要的更改以达到设定值。 为了测量机器人的位置,使用加速度计,其功能是向控制系统提供反馈,以确定控制器输出是否已稳定或是否需要安装。