摘 要
海洋是人类尚未完全开发的巨大宝库,有效的利用海洋及湖泊的资源对于人类的生存和发展至关重要。水下机器人在水下资源的开发与探查、民用方面搜救与科研、军事侦察与对抗等方面都是非常重要的组成部分。水下机器人由于其独特的水下环境适应性、相较于人工的方便性等优势,目前已经成为当今社会的热门研究领域。
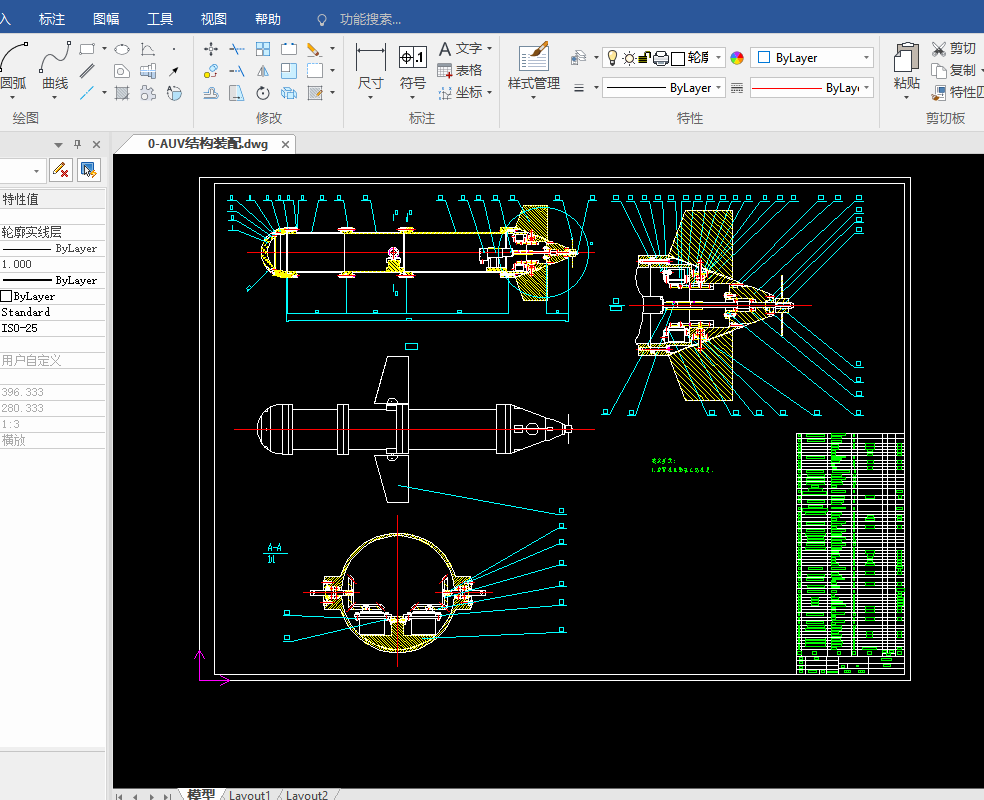
本文根据设计任务书,设定水下自主航行器的技术指标,针对水下自主航行器分层设计,主要进行水下自主航行器的结构设计,水下自主航行器的耐压壳体设计,其中包括耐压壳体的材料选用、计算校核、密封设计以及观察窗的设计;水下自主航行器推进装置与舵的设计,其中包括推进器排列设计、推进器的选用、系统与舵的设计、密封设计;水下自主航行器的防腐蚀设计。
对于水下自主航行器具体的设计从分层设计入手,由上至下进行设计,分别采用具体设计、概念设计、预留空间等设计方法。初步设计的具体方法为:判别设计要求之后,结合前人所做的数据分析,从多种设计方案中选用最优的设计方案进行进一步的研究,随后选用经验公式进行初步的校核,完成初步的设计。
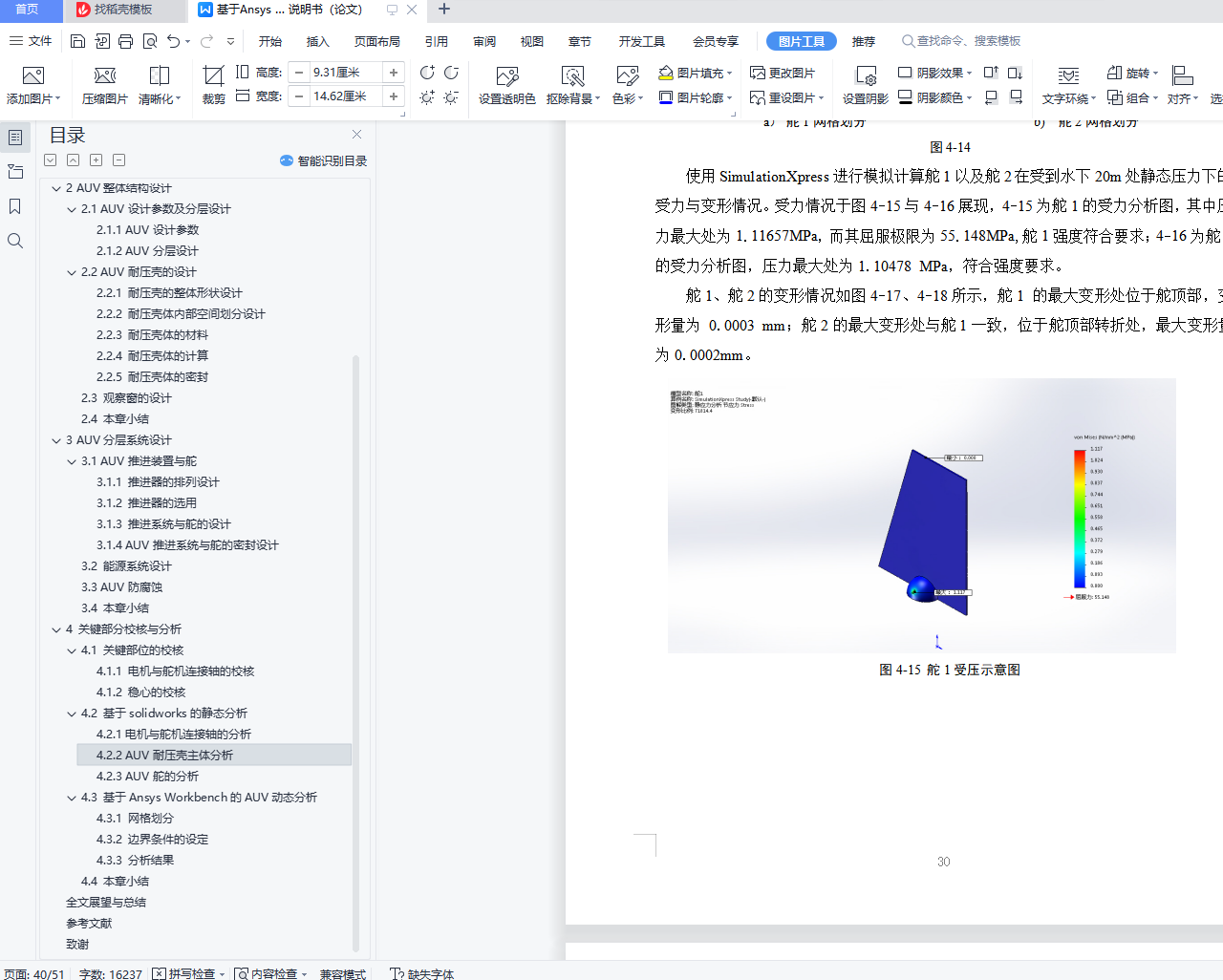
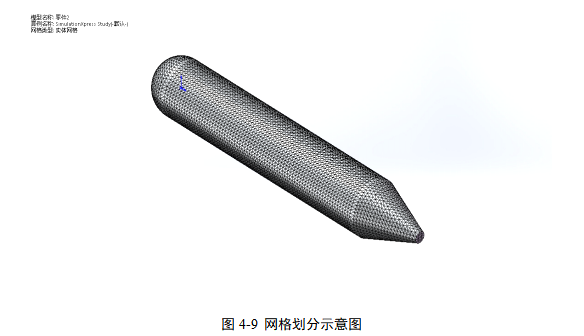
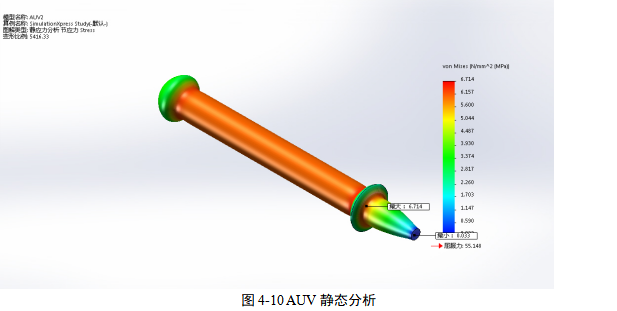
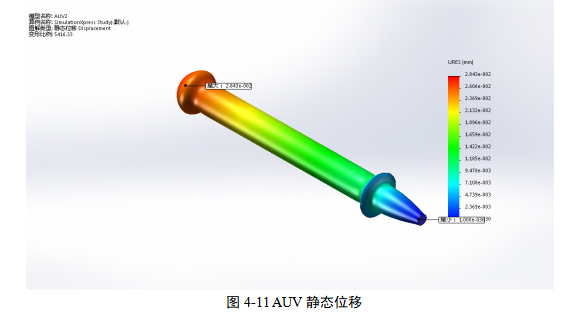
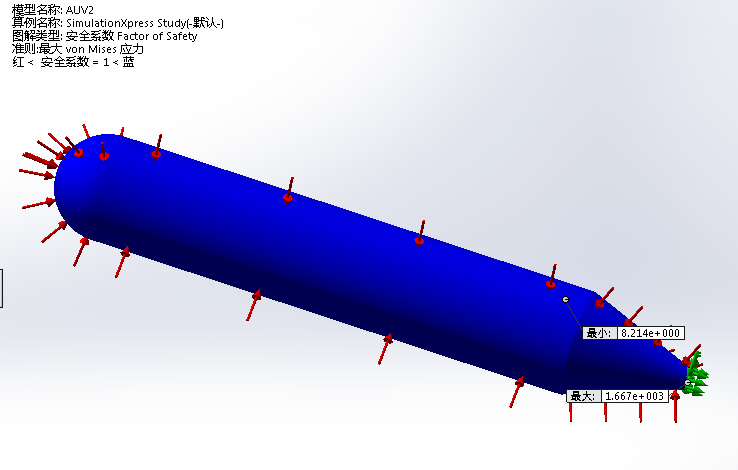
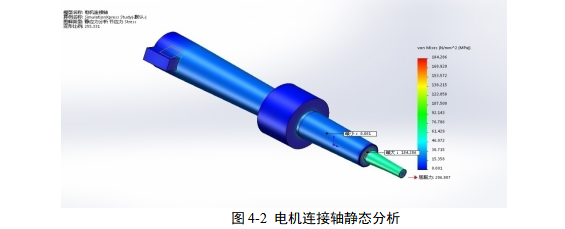
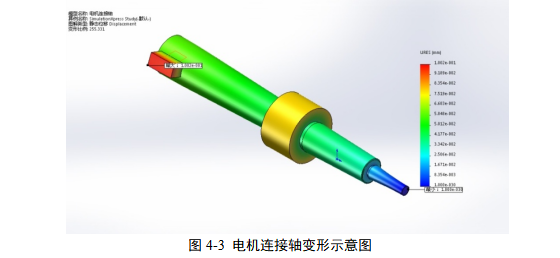
为了更好的研究AUV的水下性能,本文选用solidworks的SimulationXpress功能对AUV进行静态分析,主要对于AUV的耐压壳体、舵进行校核,就压力、变形以及安全系数三个大体方面进行分析。通过对于耐压壳体、舵整体施加压力,划分网格,进行静态分析。
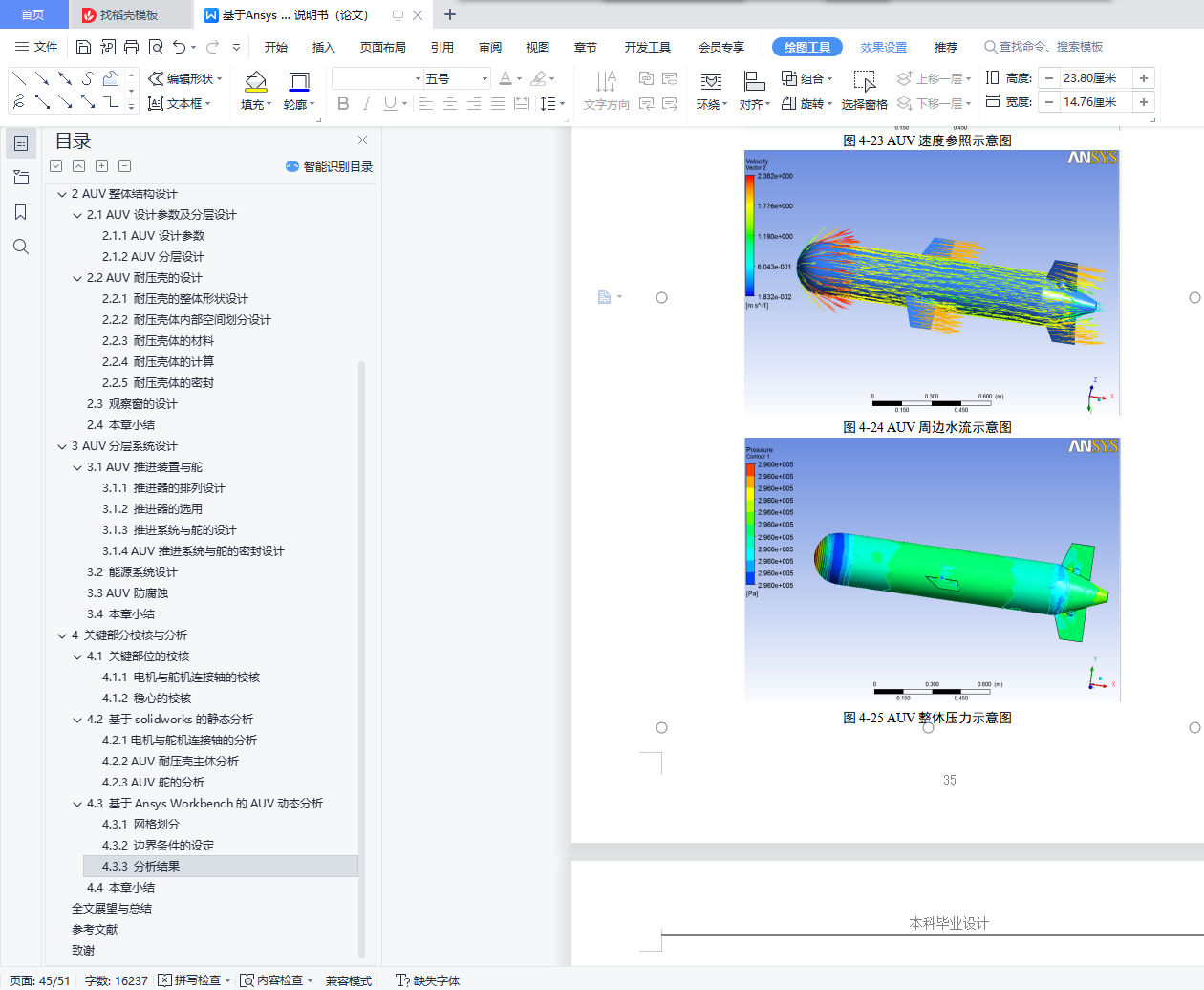
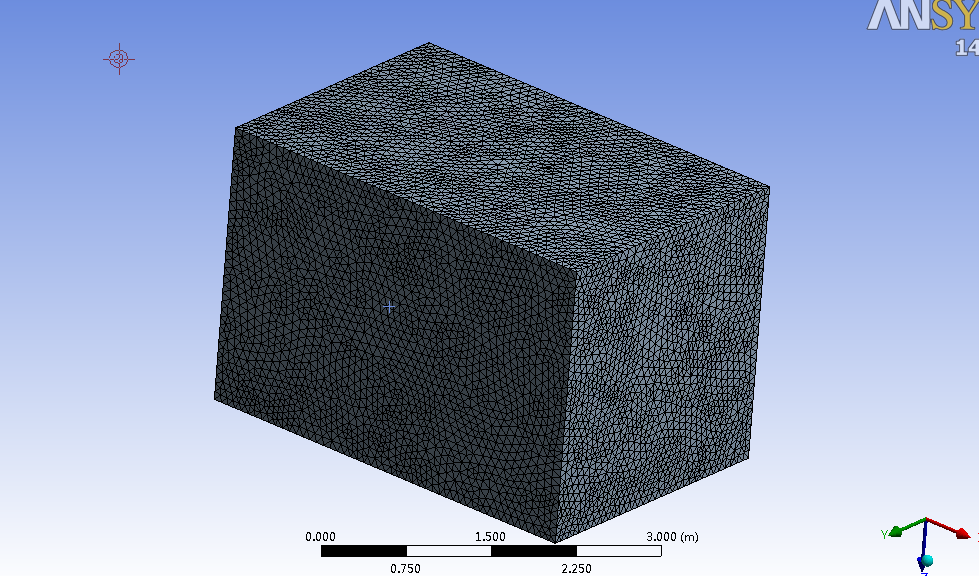
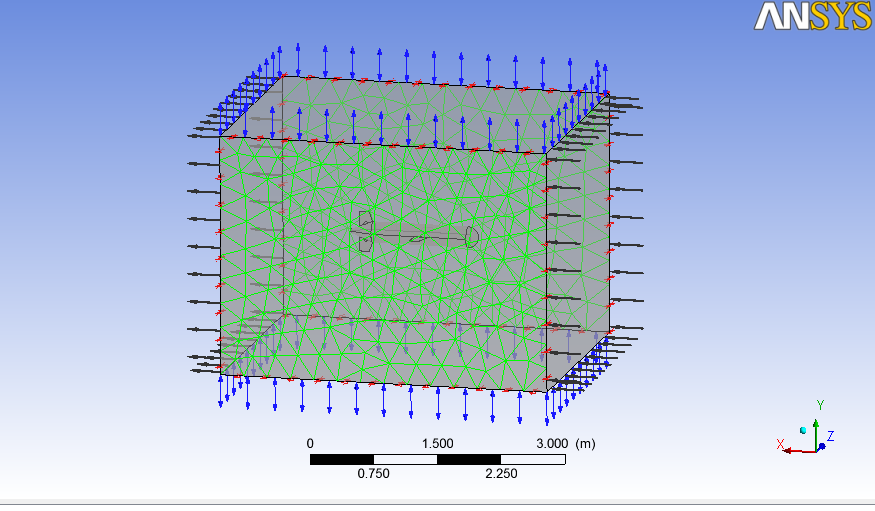
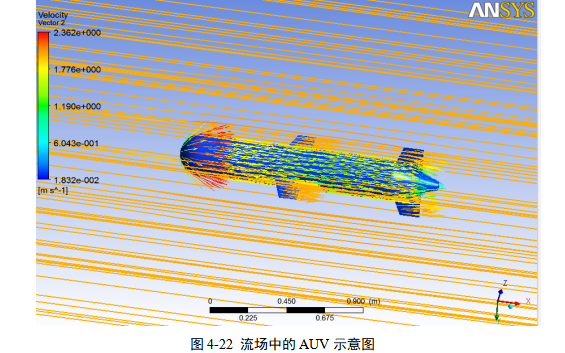
对设计完成的AUV进行基于Ansys Workbench三维动态分析,模拟AUV附近流场的运动,划分网格、设定边界条件,分析得到结果,将分析得到的结果与经验公式的计算值相比较,综合考虑速度与压力等因素,验证设计的安全可行性。设计合理则采用,反之修改设计,最终完成AUV的整体结构设计工作。
关键词:自主水下航行器;结构设计;有限元分析;仿真模拟
Abstract
The ocean is a huge untapped treasure trove of humanity, including many freshwater lakes deep water, efficient use of resources of the ocean and lakes for human survival and development is essential. Underwater robots in development and exploration, the civilian aspects of search and rescue and scientific research, the military reconnaissance and underwater resources and other confrontation is very important part, because of its unique underwater robots underwater environmental adaptability, compared to artificial convenience and other advantages, has become a hot research field in today's society.
According to the design plan, setting AUV technical indicators, the AUV hierarchical design, mainly for AUV structural design, some involved are AUV withstand voltage housing design, including pressure hull material selection, calculation check, seal design and the design of the observation window; AUV propulsion device and rudder design, including the choice of propeller arrangement design, propulsion, system and rudder design, seal design; corrosion design the autonomous underwater navigation.
For AUV specific design layered design from the start, top-down design, respectively specific design, concept design, space for other design methods. Specific methods for the preliminary design: After determining the design requirements, combined with previous data analysis done, the choice of the optimal design for further research from a variety of designs, and then make a preliminary selection of empirical formulas check, complete the preliminary design.
In order to better study AUV underwater performance, paper selects the SimulationXpress function solidworks AUV static analysis, mainly for AUV's pressure hull, rudder be checked, conducted on pressure, deformation and safety factor of three in general terms analysis. Through the pressure hull, the overall pressure on the rudder, mesh, static analysis.
AUV completed the design based Ansys Workbench three-dimensional dynamic analysis, simulation of flow field around AUV motion, mesh, set the boundary conditions, analyze the results obtained, will analyze the results of the empirical formula calculated values obtained are compared, considering speed and pressure and other factors, to verify the feasibility of the design safety. Rational design is used, otherwise modify the design, the final completion of the overall structure of AUV design.
Keywords: Autonomous Underwater Vehicle; structural design; FiniteElement Analysis; simulation
目录
1 绪论 1
1.1 研究背景及意义 1
1.2 水下机器人概述 2
1.2.1 水下机器人分类及特征 2
1.2.2 国内外研究现状 2
1.3课题主要内容 5
1.3.1 研究目的 5
1.3.2 研究内容 5
1.3.3拟解决的关键问题 5
1.3.4 研究方法 6
2 AUV整体结构设计 7
2.1 AUV设计参数及分层设计 7
2.1.1 AUV设计参数 7
2.1.2 AUV分层设计 8
2.2 AUV耐压壳的设计 8
2.2.1 耐压壳的整体形状设计 8
2.2.2 耐压壳体内部空间划分设计 9
2.2.3 耐压壳体的材料 10
2.2.4 耐压壳体的计算 10
2.2.5 耐压壳体的密封 11
2.3 观察窗的设计 12
2.4 本章小结 13
3 AUV分层系统设计 14
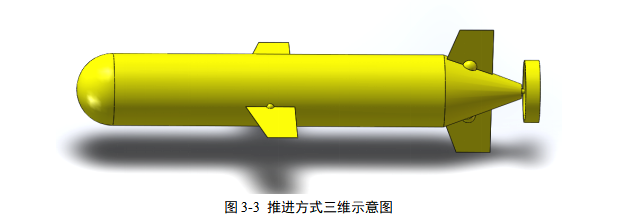
3.1 AUV推进装置与舵 14
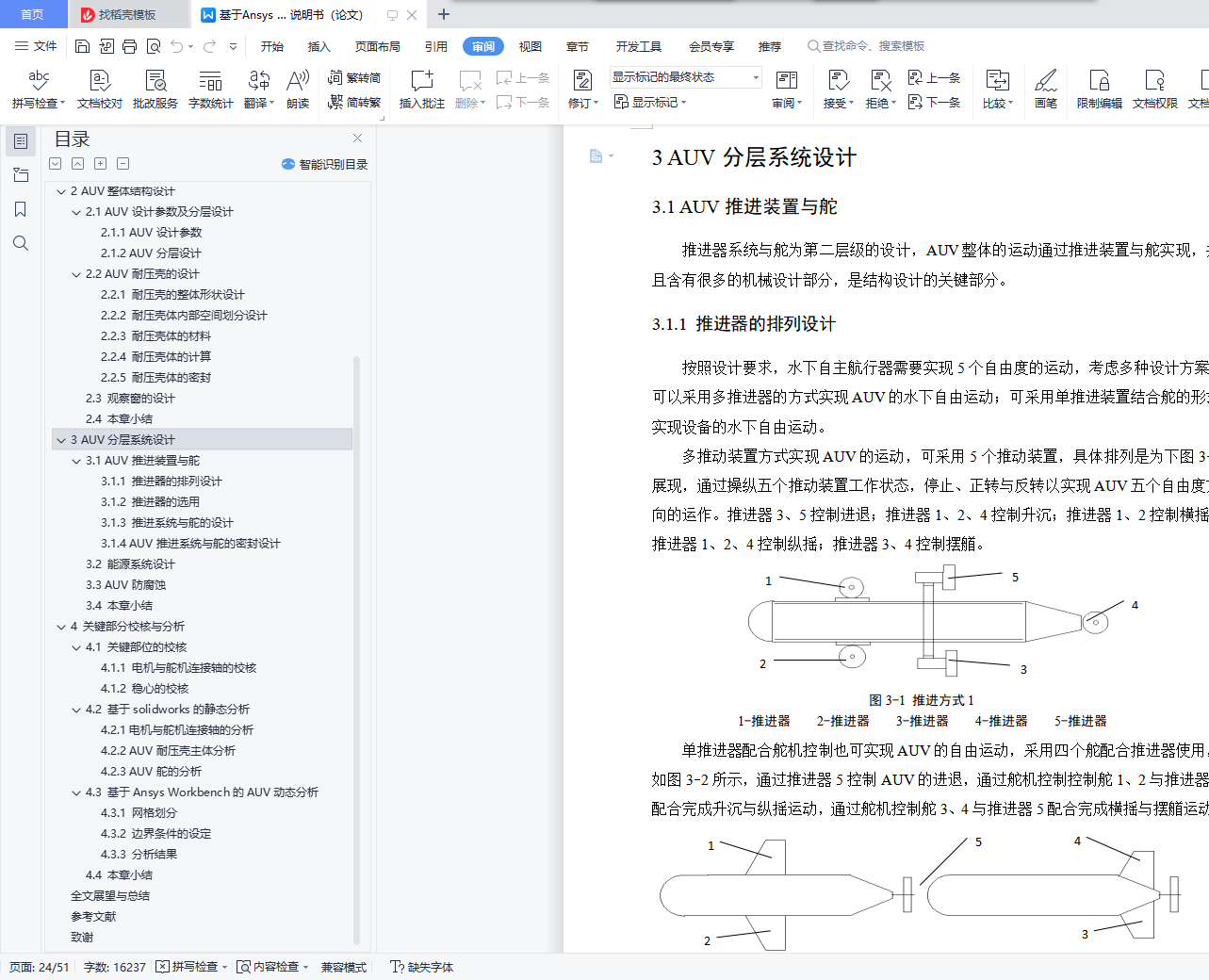
3.1.1 推进器的排列设计 14
3.1.2 推进器的选用 15
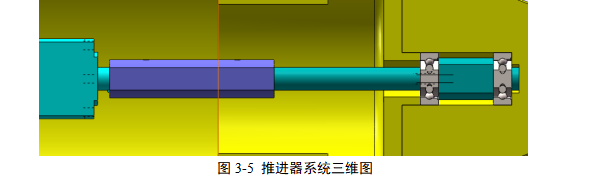
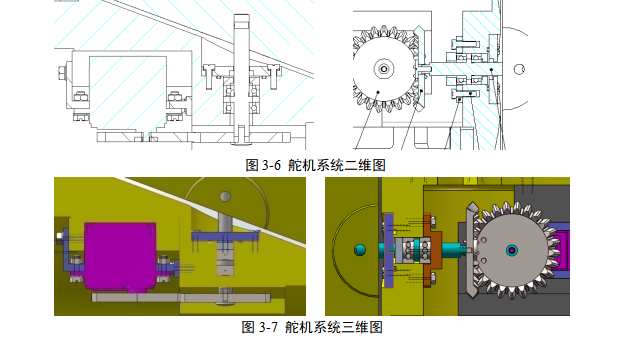
3.1.3 推进系统与舵的设计 16
3.1.4 AUV推进系统与舵的密封设计 17
3.2 能源系统设计 18
3.3 AUV防腐蚀 19
3.4 本章小结 19
4 关键部分校核与分析 21
4.1 关键部位的校核 21
4.1.1 电机与舵机连接轴的校核 21
4.1.2 稳心的校核 22
4.2 基于solidworks的静态分析 22
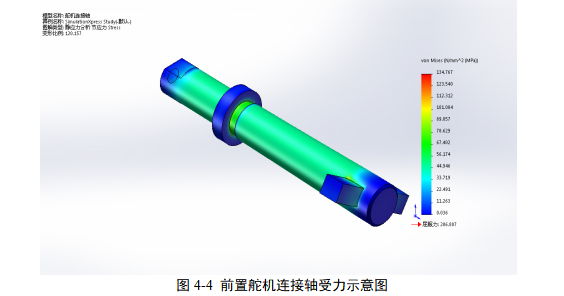
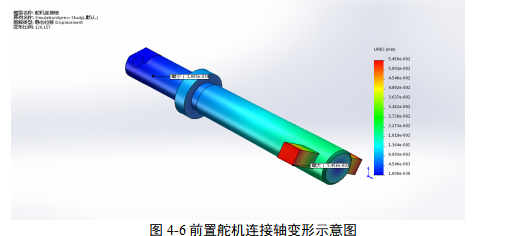
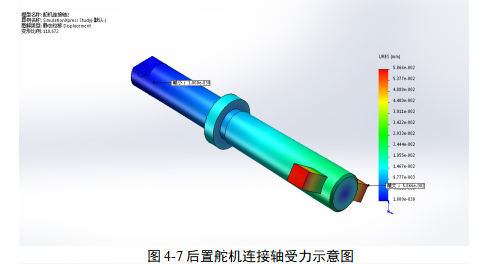
4.2.1电机与舵机连接轴的分析 22
4.2.2 AUV耐压壳主体分析 26
4.2.3 AUV舵的分析 29
4.3 基于Ansys Workbench的AUV动态分析 32
4.3.1 网格划分 32
4.3.2 边界条件的设定 33
4.3.3 分析结果 33
4.4 本章小结 36
全文展望与总结 37
参考文献 39
致谢 41