摘 要
移动机器人是近年来发展起来的一门综合学科,集中了机械、电子、计算机、自动控制以及人工智能等多学科最新研究成果,代表了机电一体化的最高成就。在移动机器人相关技术研究中,路径规划技术是一个重要研究领域。
论文首先初步讨论总结了目前主要的路径规划技术。从基于事例、基于环境模型和基于行为三个方面全面而系统地综述了移动机器人路径规划技术的研究现状,对于目前普遍采用的路径规划方法及其实际应用情况进行了较为详细介绍和分析。
然后针对IEEE每年举办的微型机器鼠比赛―此项比赛要求机器鼠能够自主在未知环境中完成迷宫穿越的任务。针对机器鼠比赛项目的环境模型未知或不确定,以及该机器人本身的某些限制, 采用基于行为的研究方法, 实现了机器鼠在未知、动态环境中的自动避障。通过对机器鼠所运行的环境建模,根据基于行为的方法对机器鼠的执行任务、沿墙行走、判断障碍旋转进行分解构建,以及对机器鼠传感器布置及机械平台设计进行理论分析。
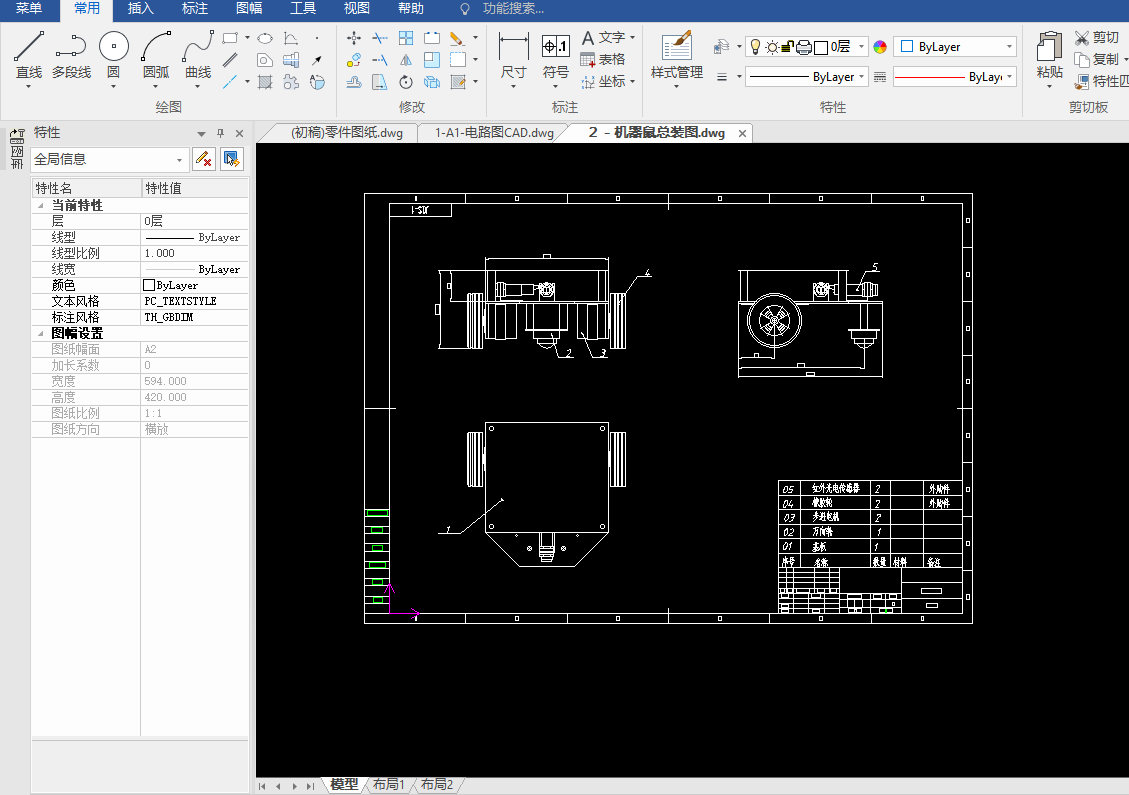
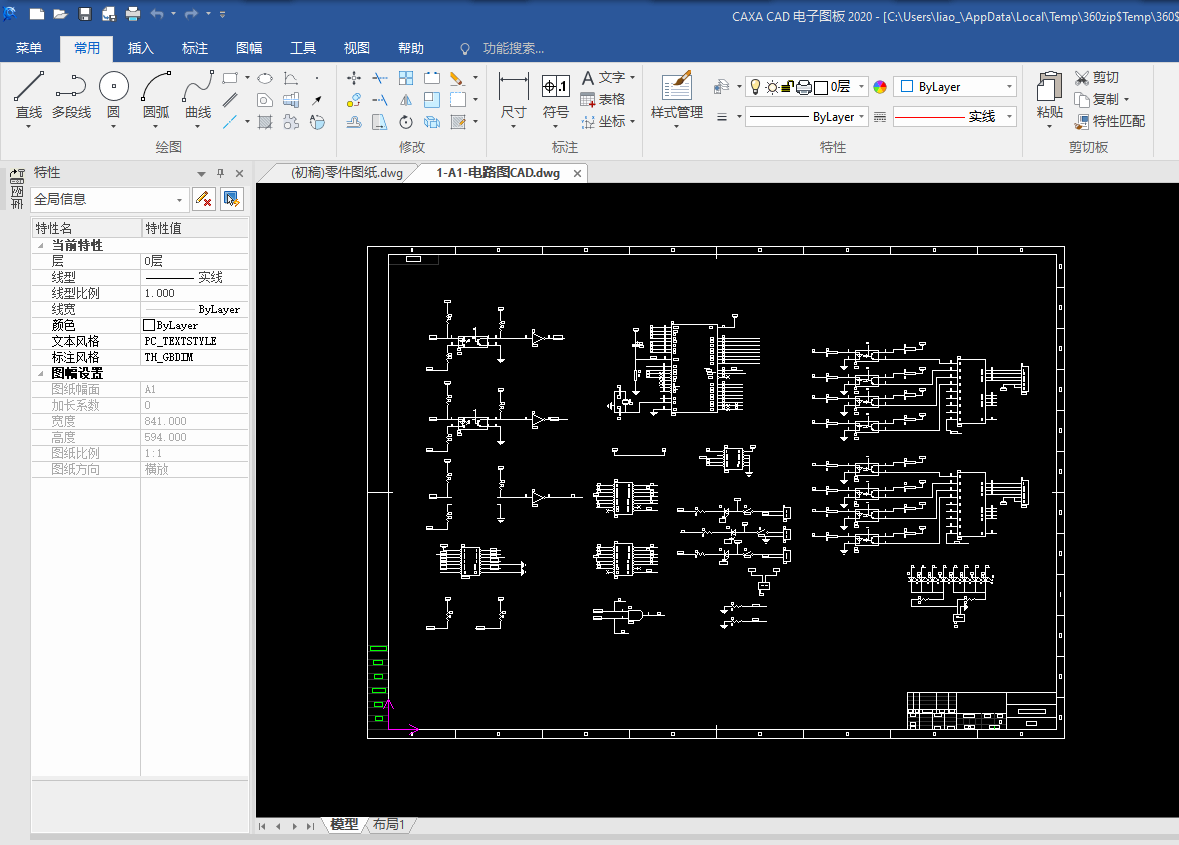
最后研制出具备自主移动功能的机器鼠实物, 它由两个步进电机驱动,在机器鼠正向和侧向共有3个漫反射式红外线光电传感器和两个碰撞开关。当传感器前方有障碍物时, 传感器的输出为1, 否则为0。采用了ATMEL公司的AT89S52单片机控制,小型四相步进电机及专用的PMM8713步进电机驱动方案,红外接近开关作为主要传感器,差动式底盘结构,初步实现了微型机器鼠竞赛用自主移动机器鼠样机研制和实验验证。
关键词:机器鼠;自主移动;路径规划;单片机;步进电机驱动;红外接近开关
Abstract
The Mobile Robert is a recently developing synthetic discipline which represents mechanical-electrical integration and centralizes the latest research of mechanics, electronics, computer, auto-control artificial intelligence, etc. In production industries the robot is used to transport and load-unload meanwhile it also widely used in others, like agriculture, medicine, and so on. In the relevant researches, the technology of it is a very important field. Firstly this paper make a summary of current technologies of path planning preliminarily, and then from case-based environment model-based and behavior-based aspects, make a summary of the recent situation mobile robot’s path planning researches comprehensively and systematically. Finally introduces and analyzes the commonly used methods and their applications.
Because of the uncertain and dynamic the environment models and the limitation of the robotic mice, we choose the method of adopting behavior-based. The self-designed autonomous navigation of mobile robot avoiding obstacles automatically can be realized. Though modeling for the circulating-circumstance of robotic mice, its tasks performing, along wall walking and obstacle-rotating judging are analyzed and constructed according to the behavior-based method as well as the arrangement of robotic mice’s sensor and the design of mechanical platform.
We have built the platform of practicality for the robotic mice. The AT89S52 single-chip controlling also miniature four phase stepper motor and circuit of step motor driving program are adopted, with infrared remote control switch controller as the major sensor and differential chassis structure. Therefore, the design of autonomous navigation of mobile vehicle aimed at the miniature robotic mice contest will be achieved. Use limited funds to make a simple carriage, build an experimental electric circuit, draw and print the circuit board and accomplish the assembling and debugging work.
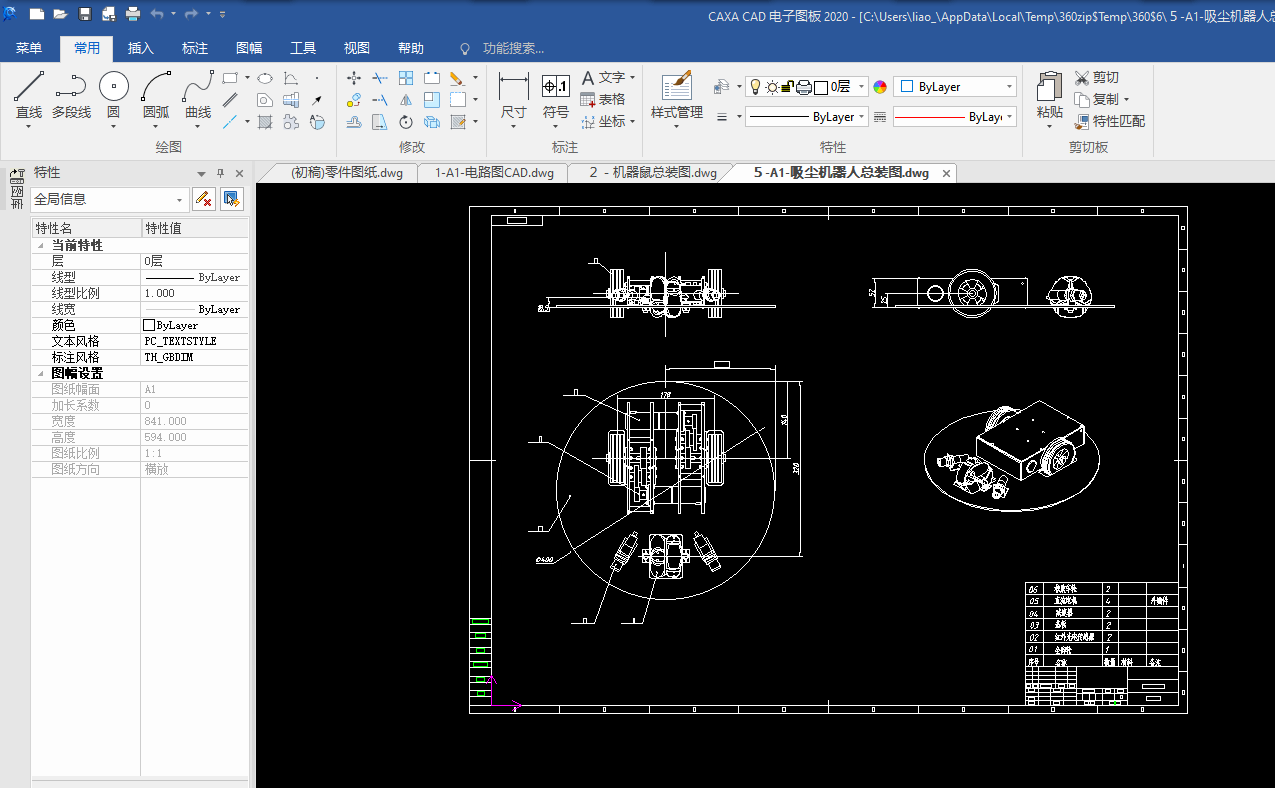
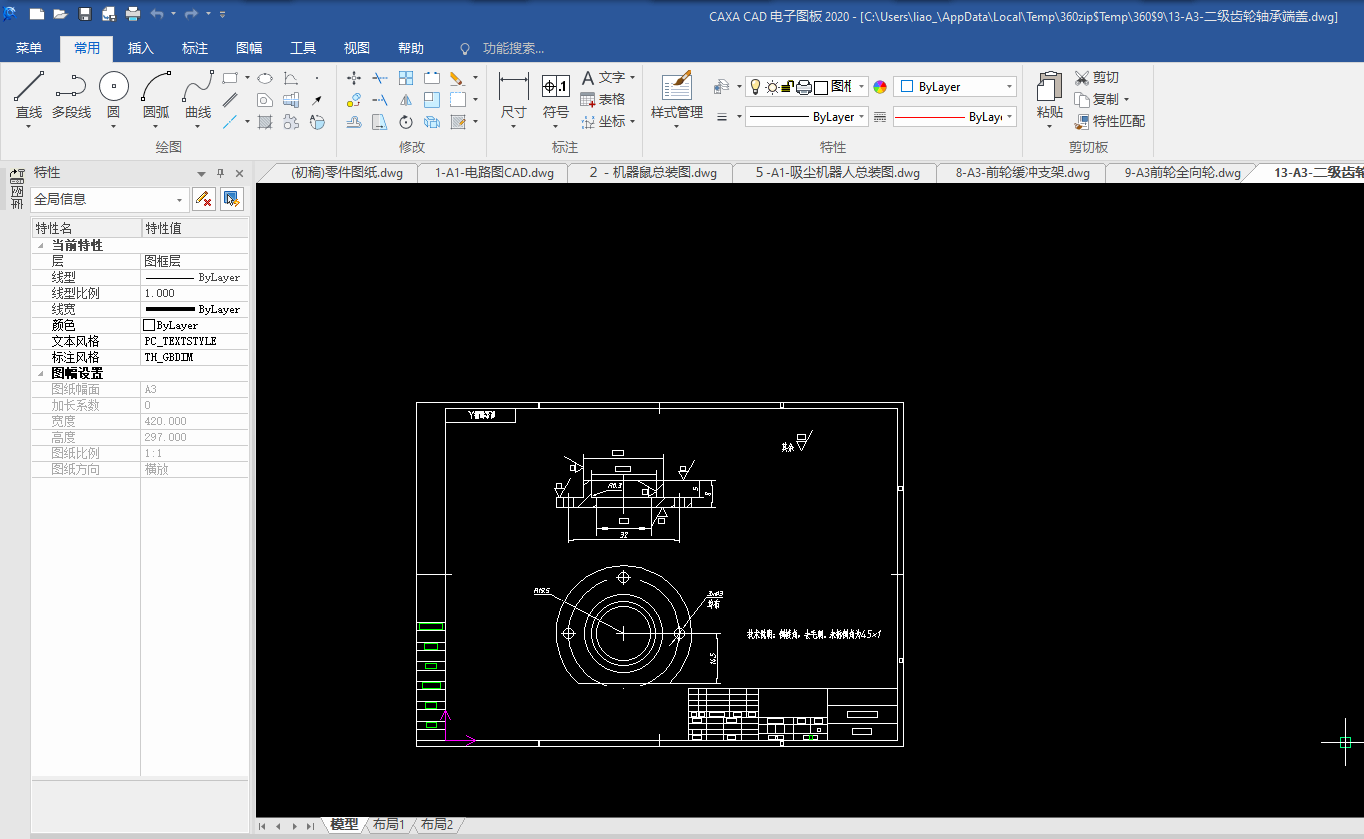
The design of robotic mice is a validation for behavior-based method. The computational algorithm is widely used in household services robots and the typical form is autonomous cleaning robots. On the ground of robotic mice sensor and control system, the thesis further put forwards a mechanical chassis design, accomplish CAD modeling calculate and analyze in terms of autonomous cleaning robots.
Key word: Mobile robot;Path planning;Singlechip-controlling drive circuit of step motor;Infrared remote control switch controller;Autonomous cleaning robots
目 录
第1章 绪论
第2章 移动机器人路径规划方法的分类及现状
2.1 基于事例的学习规划方法
2.2 基于环境模型的规划方法
2.3 基于行为的结构
第3章 机器鼠的设计任务及方案分析
3.1 微型机器鼠竞赛介绍
3.2 设计任务分解
3.3 机器鼠任务分析及基于行为设计
3.3.1 巡视通道,沿墙行走行为
3.3.2 判断通道,触发旋转行为
3.3 机械平台
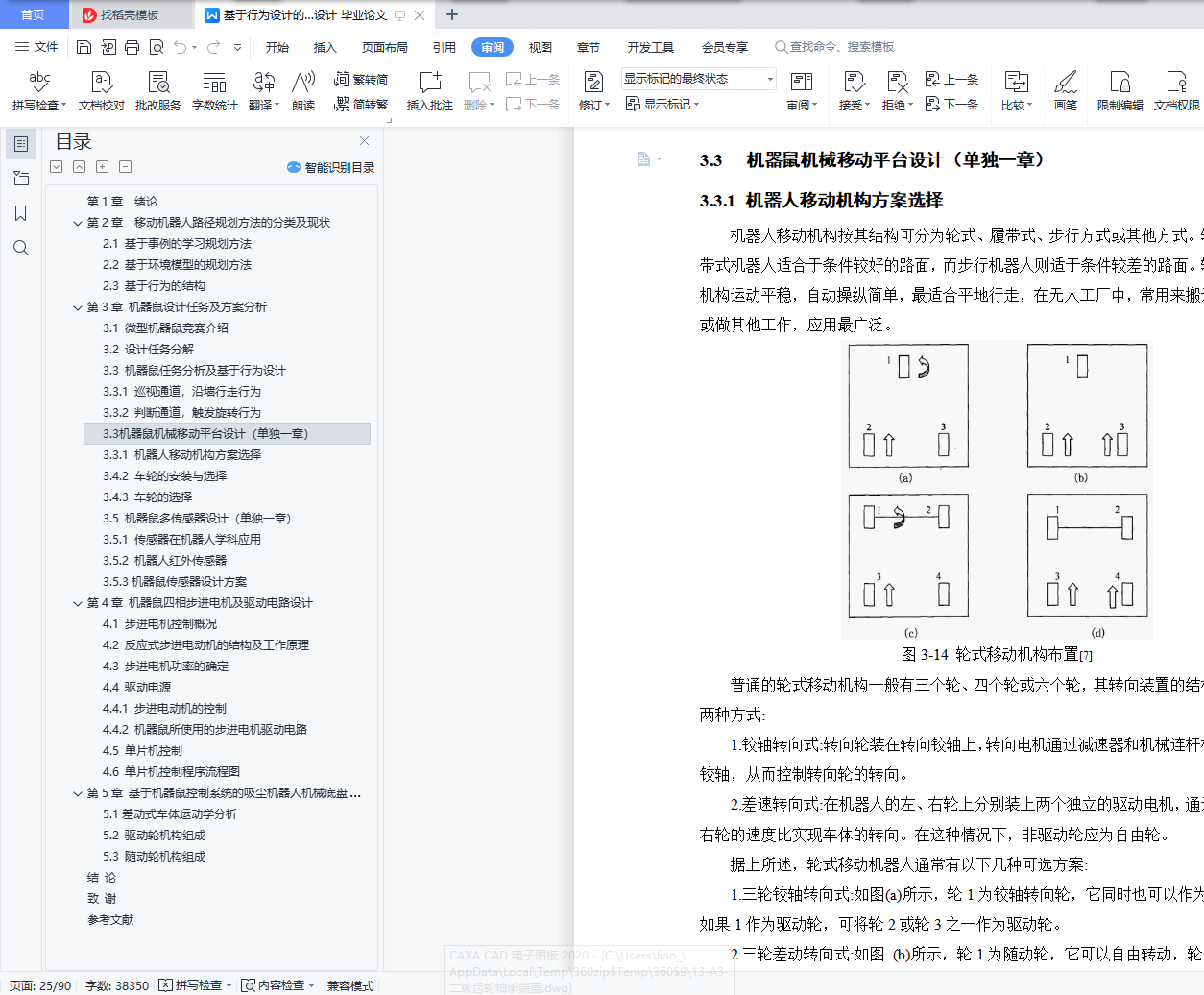
3.4.1 机器鼠移动机构方案选择
3.4.2 车轮的安装与选择
3.4.3 车轮的选择
3.5 多传感器的配合使用
3.5.1 传感器在机器人学科应用
3.5.2 机器鼠红外传感器
3.5.3机器鼠传感器设计方案
第4章 机器鼠四相步进电机及驱动电路设计
4.1 步进电机控制概况
4.2 反应式步进电动机的结构及工作原理
4.3 步进电机功率的确定
4.4 驱动电源
4.4.1 步进电动机的控制
4.4.2 机器鼠所使用的步进电机驱动电路
4.5 单片机控制
4.6 单片机控制程序流程图
第5章 基于机器鼠控制系统的一种实用自主吸尘机器人机械设计
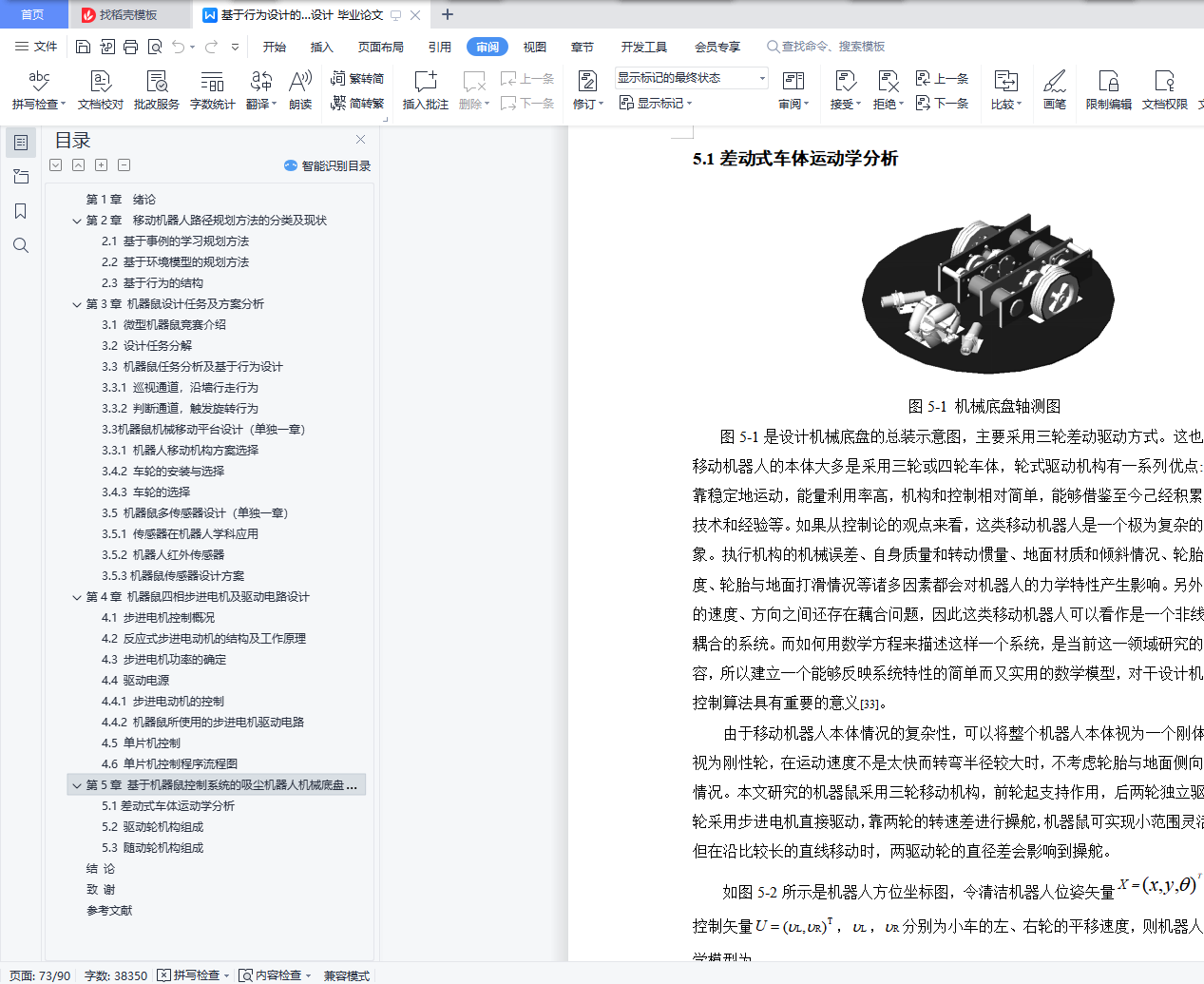
5.1差动式车体运动学分析
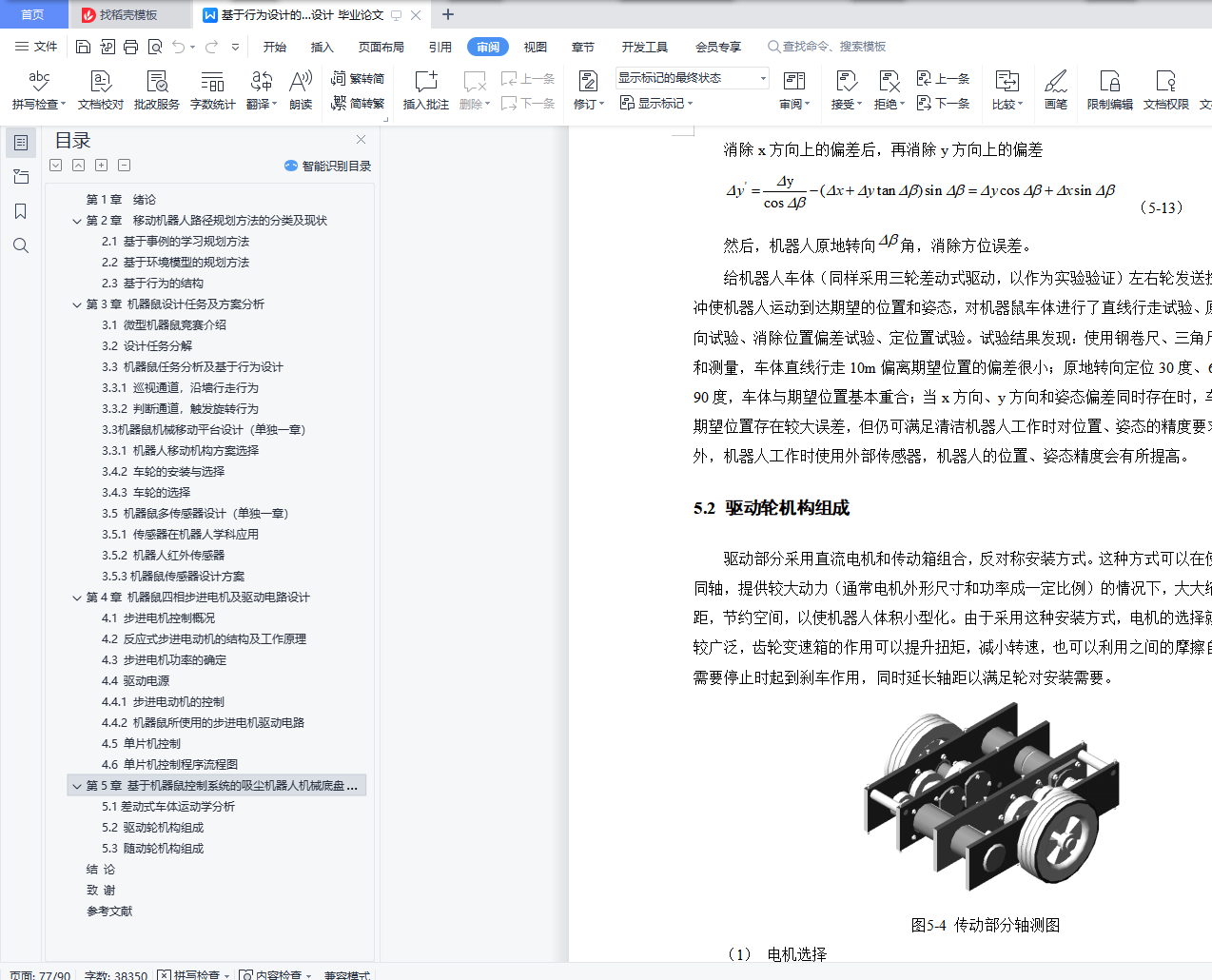
5.2 驱动轮机构组成
5.3 随动轮机构组成
结 论
致 谢
参考文献