导弹惯性导航计算
目录
1. 题目内容及要求
2部分模型参数:
2. 模型建立
2.1 坐标系基准确定
2.2 比力方程推导
2.2.3 说明
2.3 姿态旋转角速度关系推导
2.3.3 说明
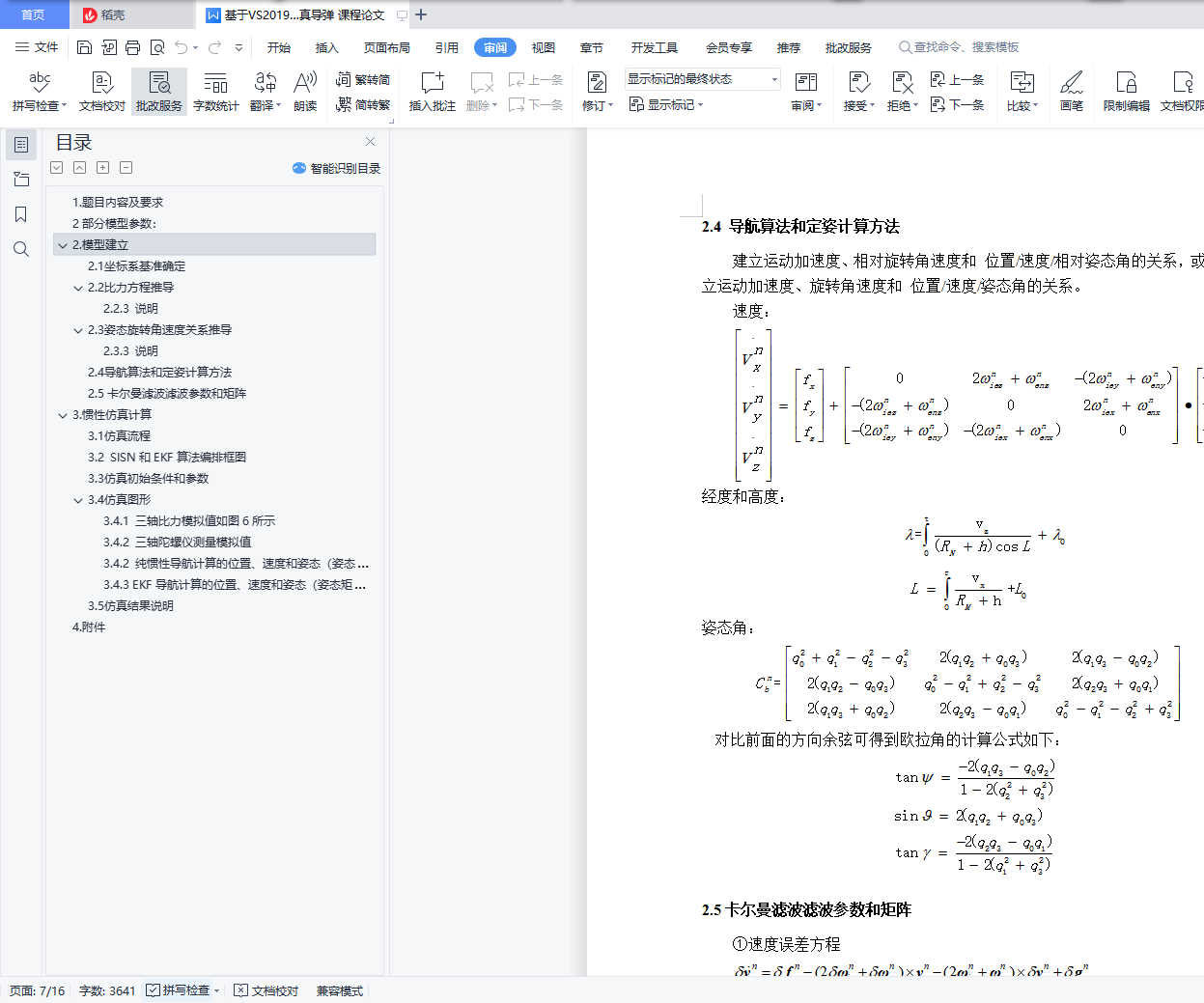
2.4 导航算法和定姿计算方法
2.5卡尔曼滤波滤波参数和矩阵
3. 惯性仿真计算
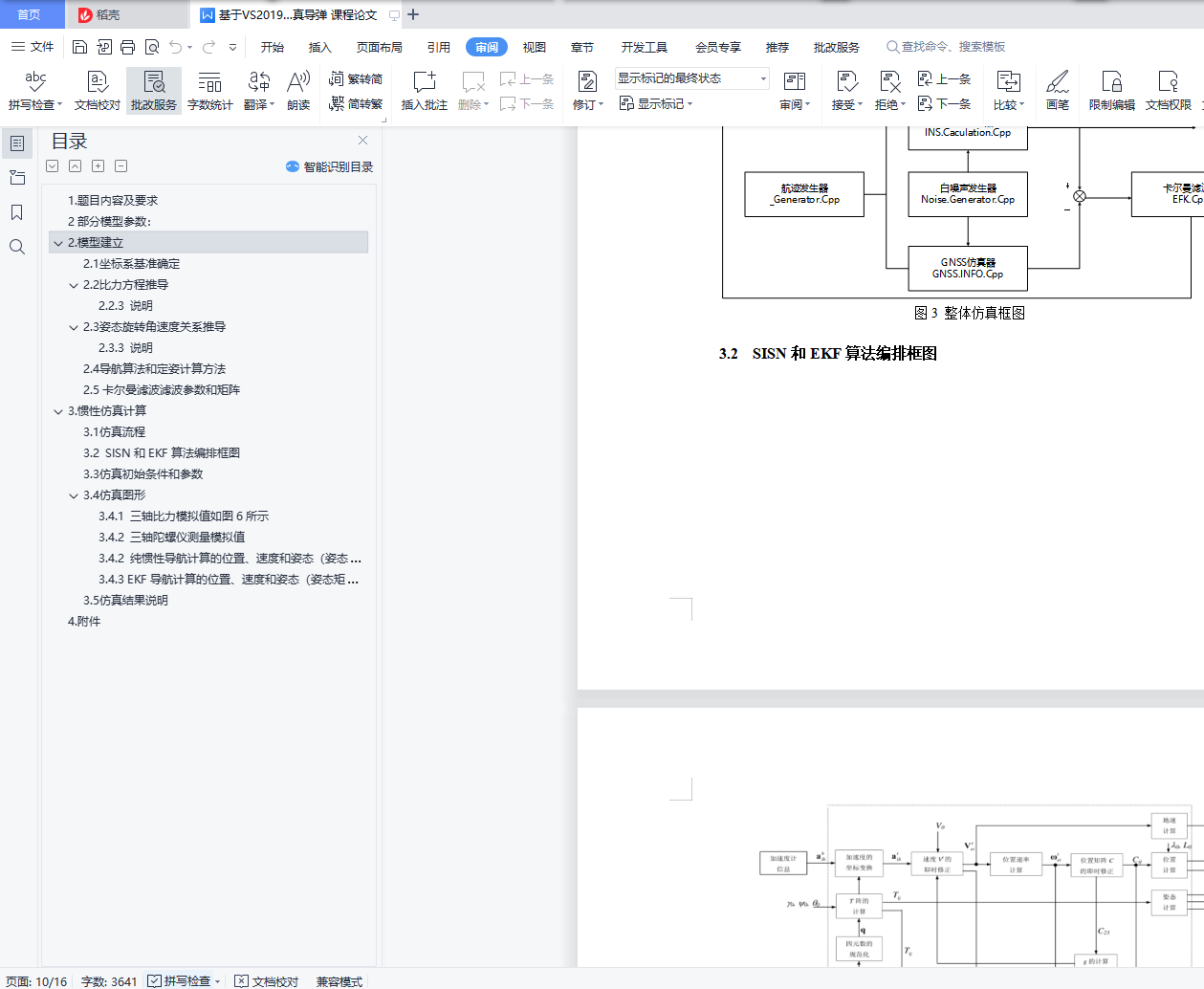
3.1 仿真流程
3.2 SISN和EKF算法编排框图
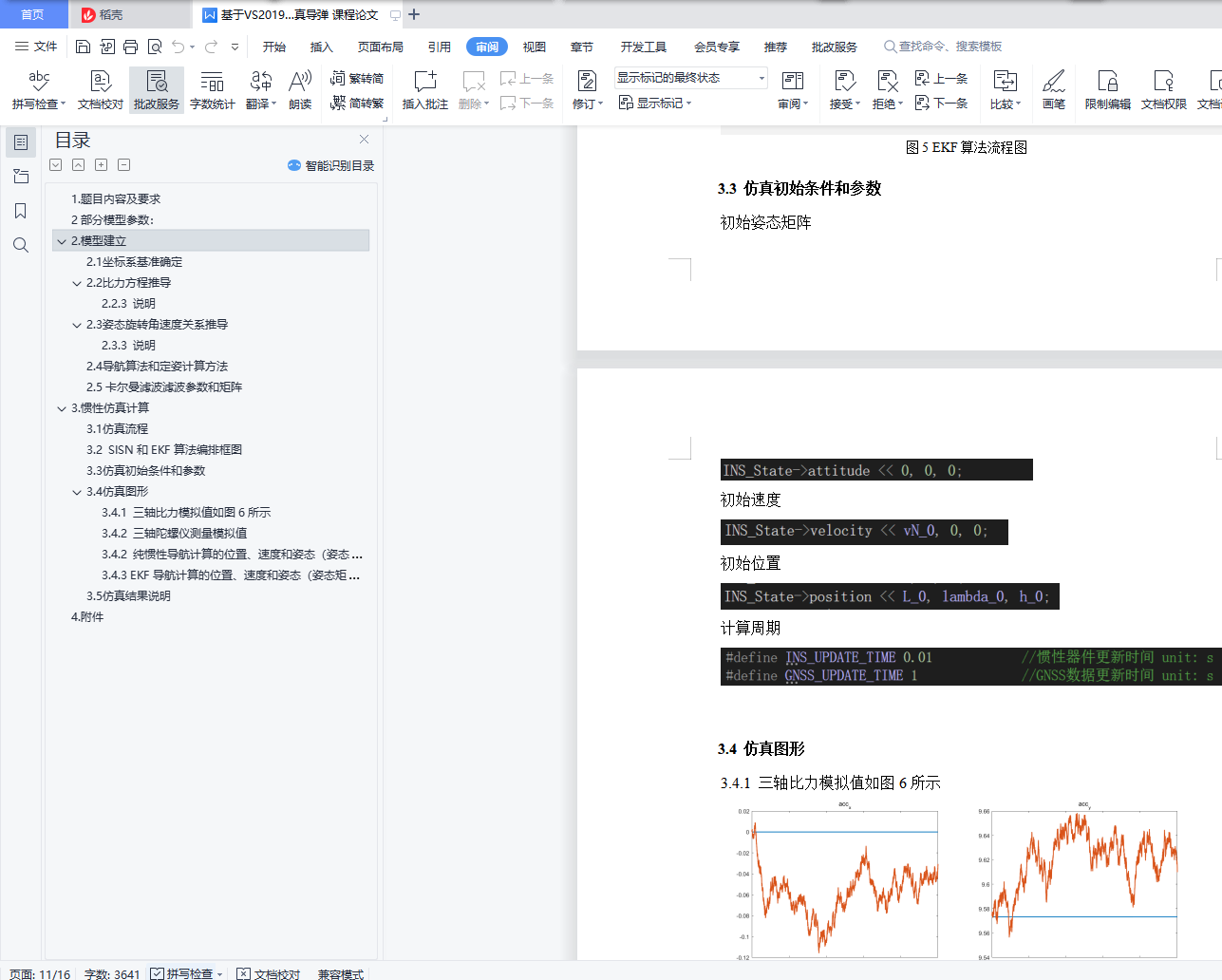
3.3 仿真初始条件和参数
3.4 仿真图形
3.4.1 三轴比力模拟值如图6所示
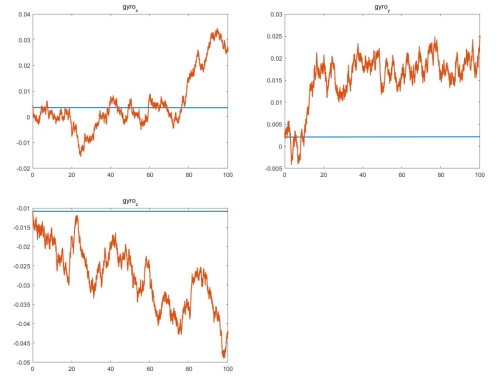
3.4.2 三轴陀螺仪测量模拟值
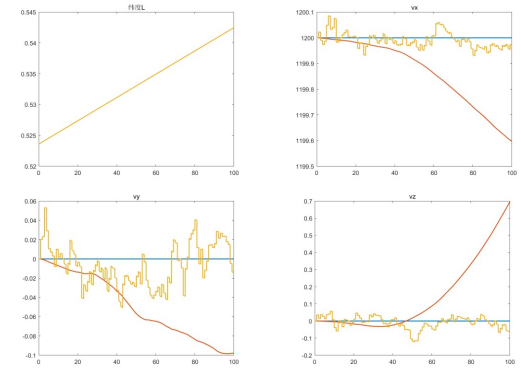
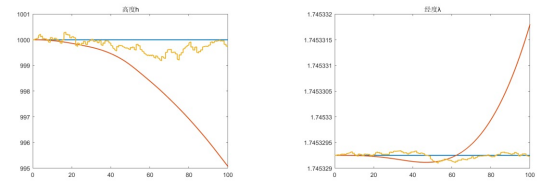
3.4.2 纯惯性导航计算的位置、速度和姿态(姿态矩阵)
3.4.3 EKF导航计算的位置、速度和姿态(姿态矩阵)
3.5 仿真结果说明
4. 附件
1. 题目内容及要求
导弹随飞机升空,在[30ºN,100ºE,1000m]的位置,以1200m/s的对地速度沿北向发射,保持匀速水平状态飞行100s,攻角、侧滑和滚转角均为零。假设导弹安装捷联式惯性导航系统,导航系统三轴指向和飞机本体一致,即捷联式惯性导航系统本体坐标系和导弹本体坐标系保持一致。惯性器件的采样周期为0.01s,,采用GNSS辅助INS,,输出周期为1s,试计算GNSS/INS组合导航输出数值。
A 导弹本体坐标系采用前上右体制,导航坐标系定义北天东坐标系。敏感测量数值包括比力、绝对角速度信息。导航输出飞行位置(经度、纬度、高度)、速度(北向、天向、东向)、姿态(俯仰、偏航和滚转)。
B导弹本体坐标系采用前上右体制,导航坐标系和惯性坐标系均定义为发射时刻的地面发射坐标系(该坐标系发射后处于静止状态),假设发射瞬间地球坐标系和地心惯性坐标系坐标轴重合。敏感测量数值包括比力、绝对角速度信息。导航输出飞行位置、速度(地面发射坐标系内的直角坐标和速度)、姿态(俯仰、偏航和滚转,本体系相对发射坐标系)。