摘要
单独的GPS或者INS导航系统,都存在自己的固有缺陷。GPS/INS组合导航系统以GPS导航系统为主,INS导航系统为辅,将两者组合起来,改善了总体性能。GPS/INS组合导航系统无论在军事还是民用上都具有很大的价值和更加广泛的应用前景。本文针对GPS/INS组合导航技术、GPS/INS组合导航系统软硬件设计等为题展开较为深入的研究,所做的主要工作可以归纳为以下几方面:一、分析了GPS导航系统和INS导航系统的工作原理和通常的应用场景。研究GPS导航系统和INS导航系统的优点、缺陷及缺陷产生的原因。二、结合GPS和INS导航技术的特点,提出GPS/INS组合导航系统的概念。分析GPS/INS组合导航系统的关键技术与工作原理为软硬件设计提供初步理论依据。三、提出GPS/INS组合导航系统的软硬件设计方案。详细介绍了数据采集模块和数据处理模块的软硬件设计。四、探讨了Kalman滤波器原理以及联邦式卡尔曼滤波器在GPS/INS组合导航系统中的应用。
关键词: GPS,INS,组合导航系统,数据处理,Kalman
Abstract
Separate GPS or INS navigation system, there have own inherent flaws.GPS/INS Integrated Navigation System use GPS as its main Navigation system, supplemented by the two together to improve the overall performance. GPS / INS integrated navigation system have great value and broad application either in the military or civilian. In this paper, GPS / INS integrated navigation technology, GPS / INS integrated navigation system software and hardware design for the title to start a more in-depth study. The main aspects can be summarized as follows prospects.First,take a brief introduction of the GPS navigation system ,INS navigation system works and their usual scenarios. Discuss advantages and shortcomings of GPS and INS navigation system, also discuss the causes of defects. Second Introduce the current development trend of navigation and positioning technology, combining the features of GPS and INS navigation technology, proposed GPS / INS integrated navigation system. Develop the theory of GPS/INS Integrated Navigation System, introduce its advantages and applications, hardware and software design for the initial theoretical basis. Third GPS / INS integrated navigation system software and hardware design. Introduce the software and hardware design of the data acquisition and data processing module. At last Introduced the principle of Kalman filter and how federal Kalman filter use in GPS / INS Integrated Navigation System.
Key Words: GPS, INS,Kalman, Data analysis,Integrated Navigation System
目录
摘要 i
Abstract ii
第1章 绪论 1
1.1 课题背景 1
1.2 组合导航系统现状 2
1.3 课题意义 3
1.4 本文主要内容 3
第2章 GPS、INS导航系统介绍 5
2.1 GPS系统 5
2.1.1 GPS空间部分组成 5
2.1.2 GPS地面部分组成 6
2.1.3 GPS用户部分组成 7
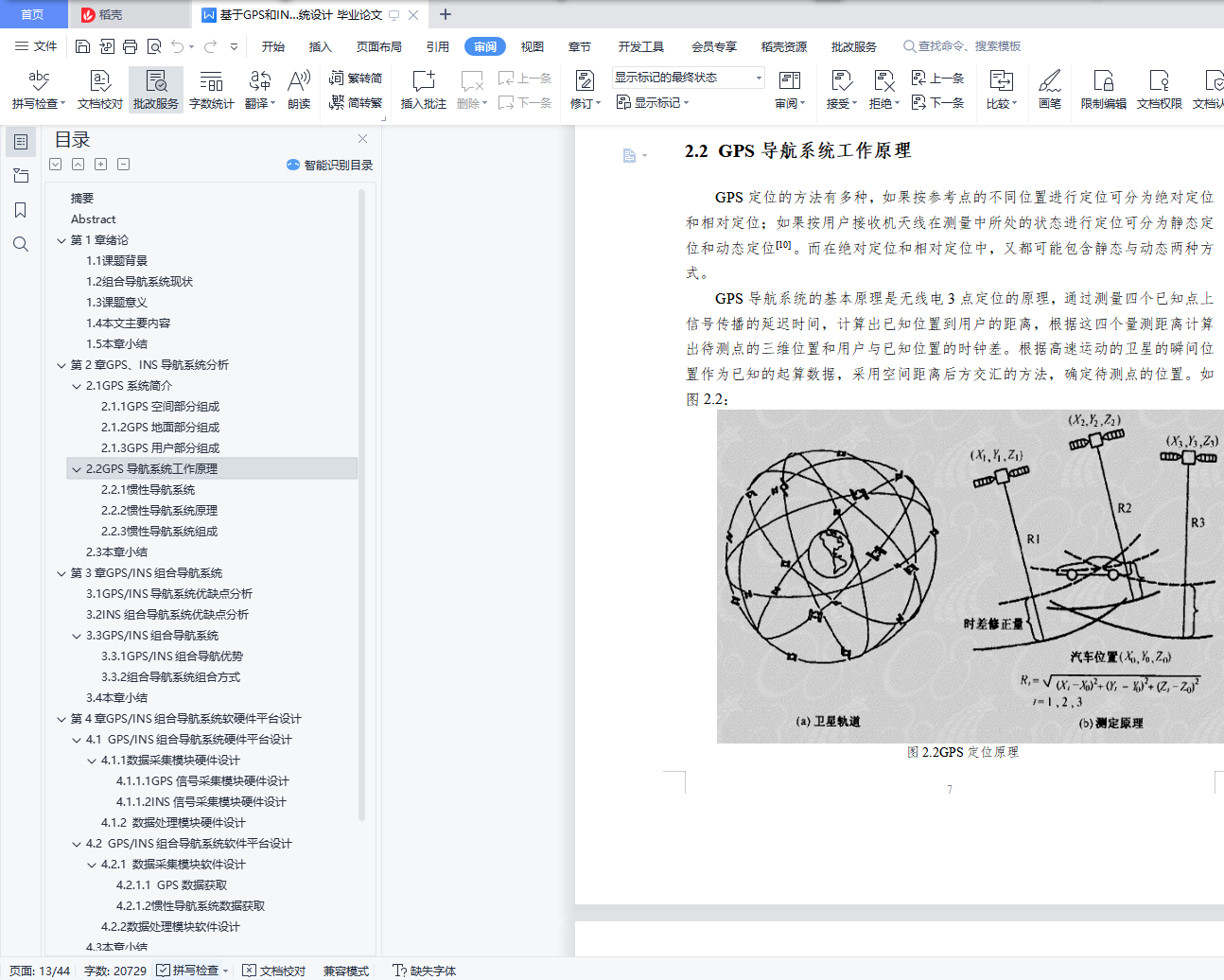
2.2 GPS导航系统工作原理 7
2.2.1 惯性导航系统 9
2.2.2 惯性导航系统原理 9
2.2.3 惯性导航系统组成 10
2.3 本章小结 11
第3章 GPS/INS组合导航系统 12
3.1 GPS/INS导航系统优缺点分析 12
3.2 INS组合导航系统优缺点分析 12
3.3 GPS/INS组合导航系统 13
3.3.1 GPS/INS组合导航优势 13
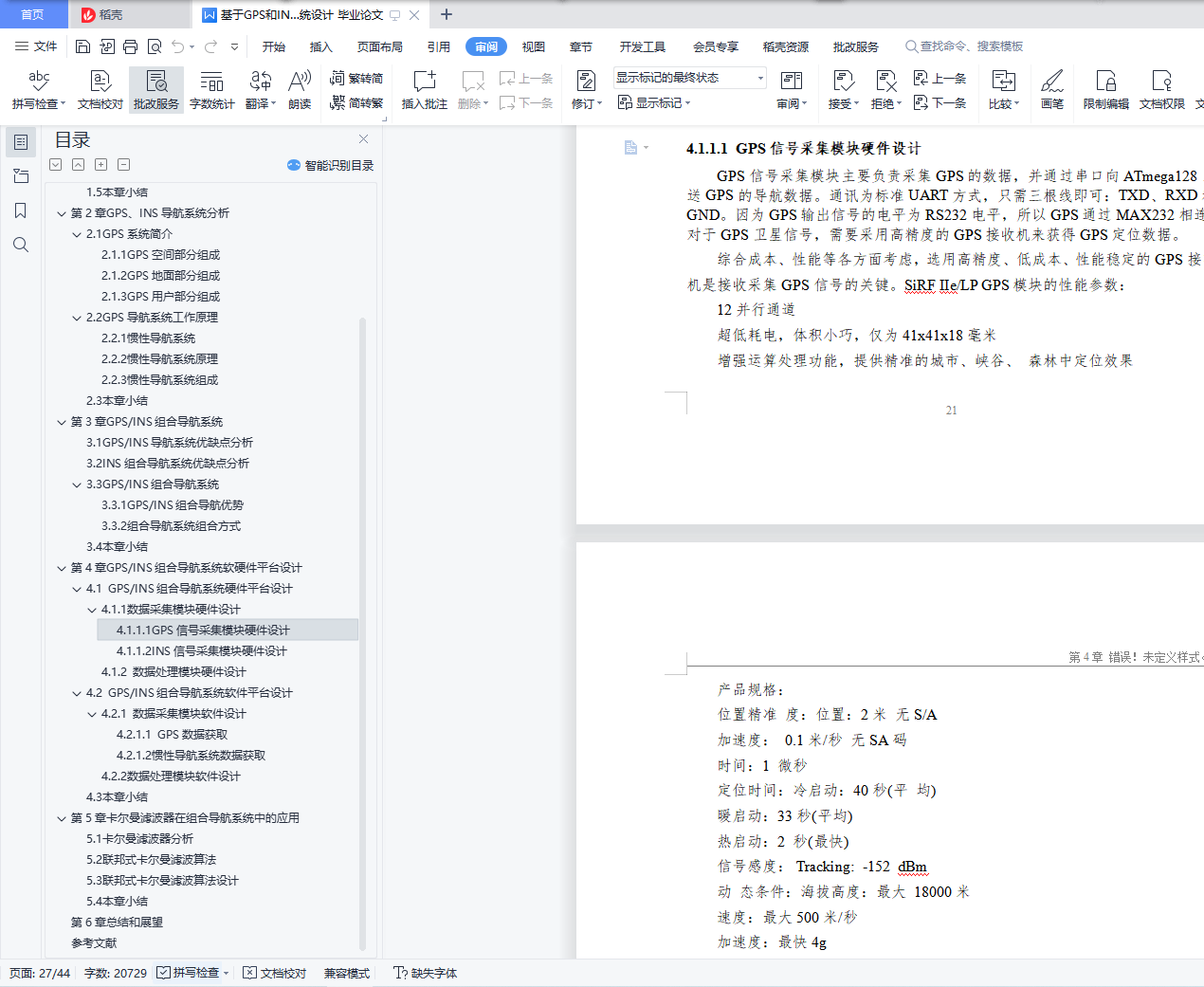
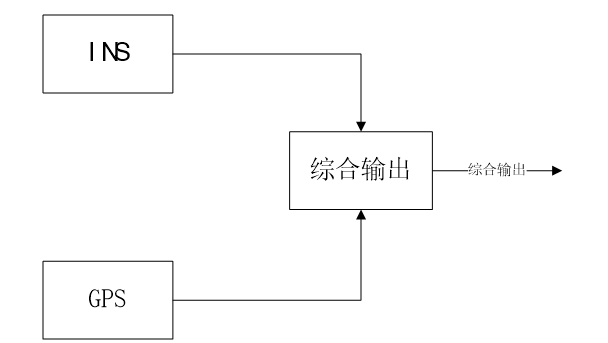
3.3.2 组合导航系统组合方式 14
3.4 本章小结 16
第4章 GPS/INS组合导航系统软硬件平台设计 17
4.1 GPS/INS组合导航系统硬件平台设计 17
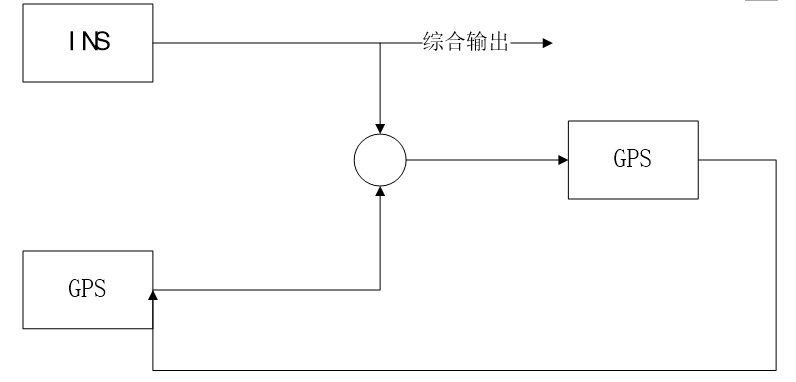
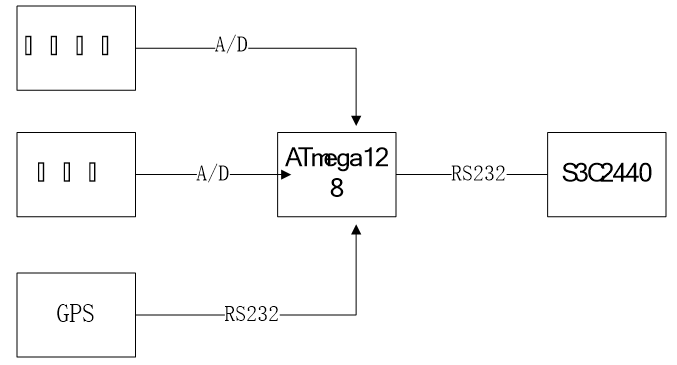
4.1.1 数据采集模块硬件设计 18
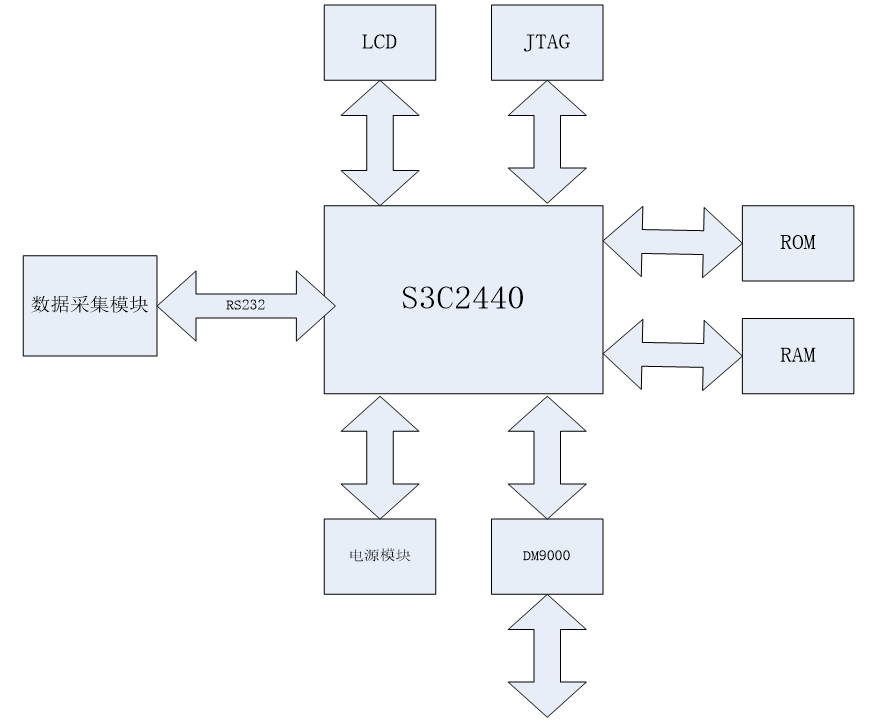
4.1.2 数据处理模块硬件设计 22
4.2 GPS/INS组合导航系统软件平台设计 24
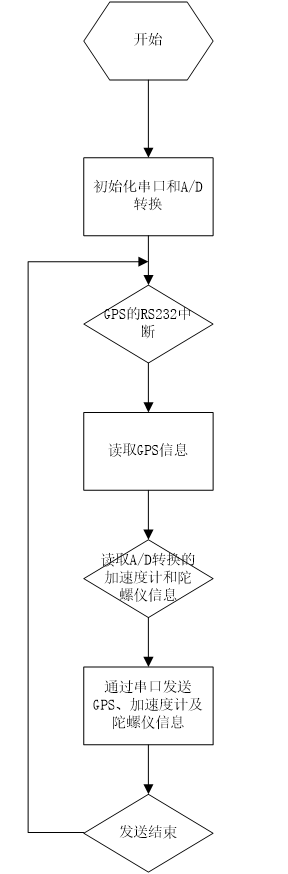
4.2.1 数据采集模块软件设计 24
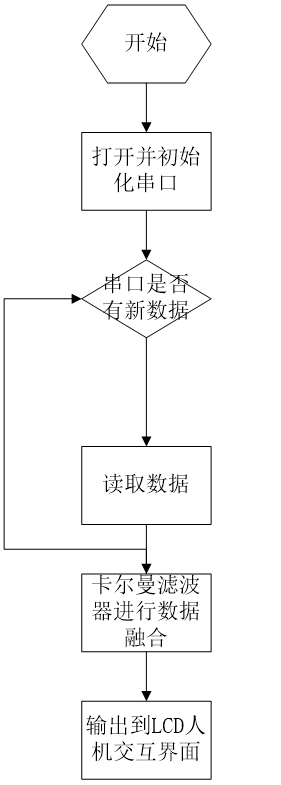
4.2.2 数据处理模块软件设计 26
4.3 本章小结 28
第5章 卡尔曼滤波器在组合导航系统中的应用 29
5.1 卡尔曼滤波器简介 29
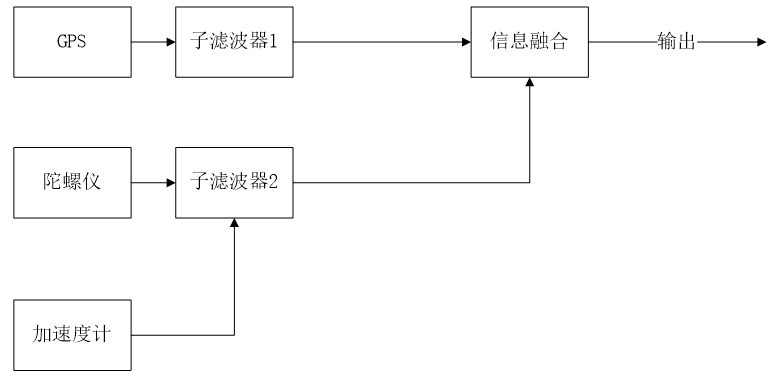
5.2 联邦式卡尔曼滤波算法 31
5.3 联邦式卡尔曼滤波算法设计 31
5.4 本章小结 33
第6章 总结和展望 34
参考文献 35
作者简历 37
致谢 38