摘 要
本次设计以家用的清扫机器人为研究对象,利用单片机控制机器人,使它完成相应的工作。家庭清扫机器人将行走机器人技术和吸尘器技术有效地融合起来,实现了室内环境全自动清扫,替代人们完成传统繁杂的人工清扫工作,在家中清扫过程中不需要人操作,省时,省力, 近年来已受到国内外研究人员的高度重视。作为智能移动机器人的一个特殊应用,从技术方面讲,家用清扫机器人底盘机械结构比较具体地体现了移动机器人的多项关键技术,具有较强的代表性。从结构方面对机器人底盘空间布局设计显得尤为必要,吸尘机构的设计、零部件的选择更关系到机器人本身性能的优越性,更具市场竞争力。
根据机器人的空载及工作载重和功率要求选择合适的驱动电机,研究机器人吸尘原理,设计集吸尘、清扫、易拆装结构多功能一体的结构,机器人底盘结构的设计分析。该机器人采用统一动作、协调控制的原则,通过电机带动动力轮实现家用清扫机器人底盘机械结构的运动,通过中控系统的控制来实现家用清扫机器人底盘机械结构的动作,由于是中控系统控制,所以控制灵活,多样。通过控制器来控制机器人的动作,实现该机器人清扫、除尘的功能。
关键词:家用;清扫机器人;底盘;机械结构;SolidWorks
Abstract
This design takes the household cleaning robot as the research object, uses the single chip microcomputer to control the robot, causes it to complete the corresponding work. The family cleaning robot combines the walking robot technology with the vacuum cleaner technology effectively, realizes the indoor environment automatic cleaning, replaces the people to complete the traditional complicated manual cleaning work, does not need the human operation in the home cleaning process, saves time and effort. In recent years, researchers at home and abroad attach great importance. As a special application of intelligent mobile robot, the domestic cleaning robot embodies many key technologies of mobile robot and has strong representativeness. It is very necessary to design the space layout of robot chassis from the aspect of structure. The design of vacuum mechanism and the selection of parts are more related to the superiority of robot's own performance and more competitive in the market.
According to the requirements of no load, working load and power of the robot, the proper driving motor is selected, the principle of robot dust cleaning is studied, the multi-function structure of dust cleaning, cleaning and easy disassembly structure is designed, and the design and analysis of robot chassis structure is designed. The robot adopts the principle of unified action and coordinated control, realizes the movement of the household cleaning robot by driving the power wheel by the motor, and realizes the action of the household cleaning robot through the control of the central control system. Because it is the control of the central control system, the control is flexible and diverse. Through the controller to control the robot action, the robot cleaning, dust removal function.
Keywords: household; cleaning robot; chassis; mechanical structure; SolidWorks
目 录
摘 要
Abstract
1 绪论
1.1 选题背景及意义
1.1.1 选题背景
1.1.2 选题意义
1.2 国内外研究现状
1.2.1 国外产品研究状况
1.2.2 国内产品研究状况
1.2.3 电源自主充电技术
1.3 研究内容
2 机械结构总体方案设计
2.1 总体方案图
2.2 工作原理
3 清扫机器人总体设计
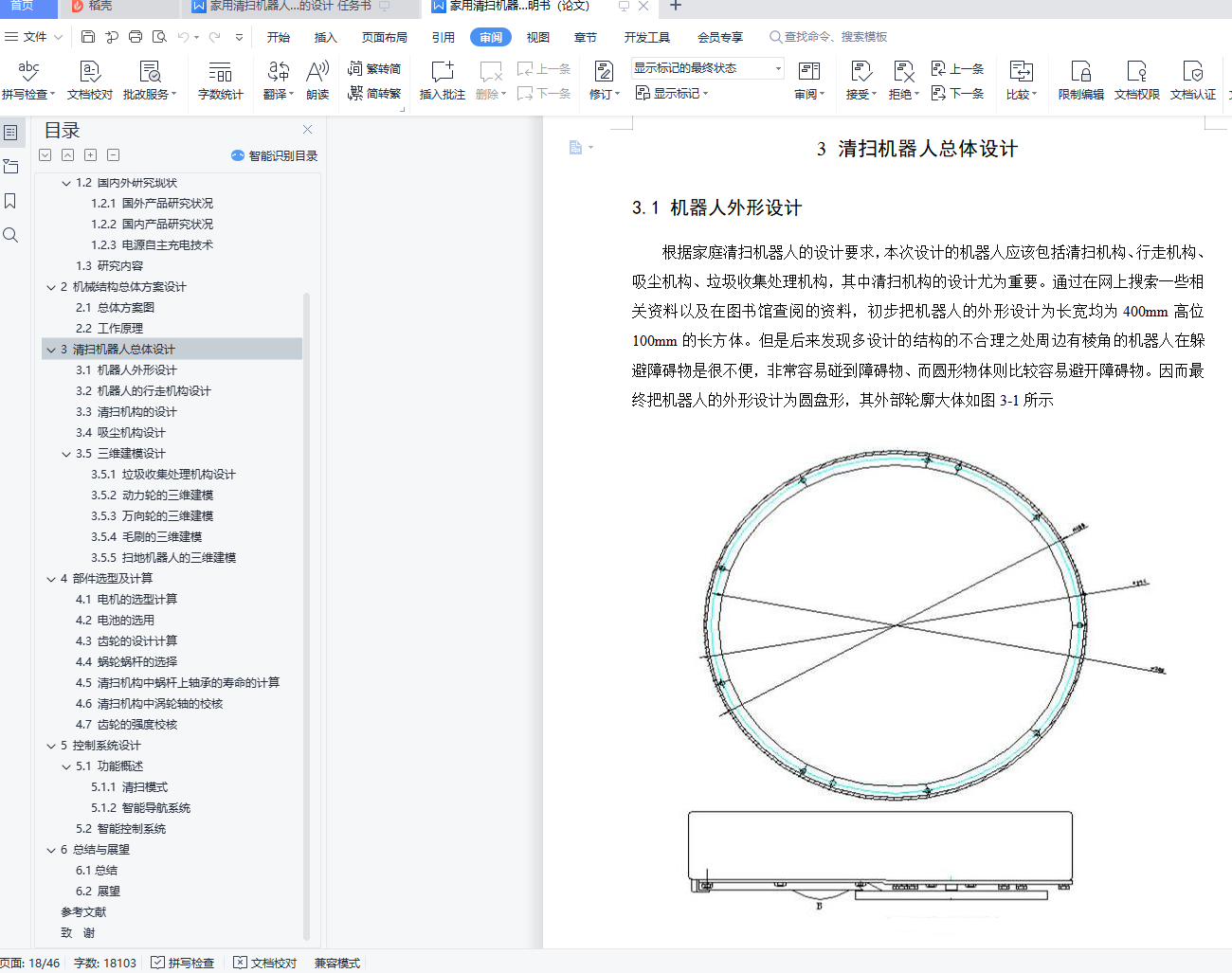
3.1机器人外形设计
3.2 机器人的行走机构设计
3.3 清扫机构的设计
3.4吸尘机构设计
3.5垃圾收集处理机构设计
4 部件选型及计算
4.1 电机的选型计算
4.2 电池的选用
4.3 齿轮的设计计算
4.4 蜗轮蜗杆的选择
4.5 清扫机构中蜗杆上轴承的寿命的计算
4.6 清扫机构中涡轮轴的校核
4.7 齿轮的强度校核
5 控制系统设计
5.1 功能概述
5.1.1 清扫模式
5.1.2 智能导航系统
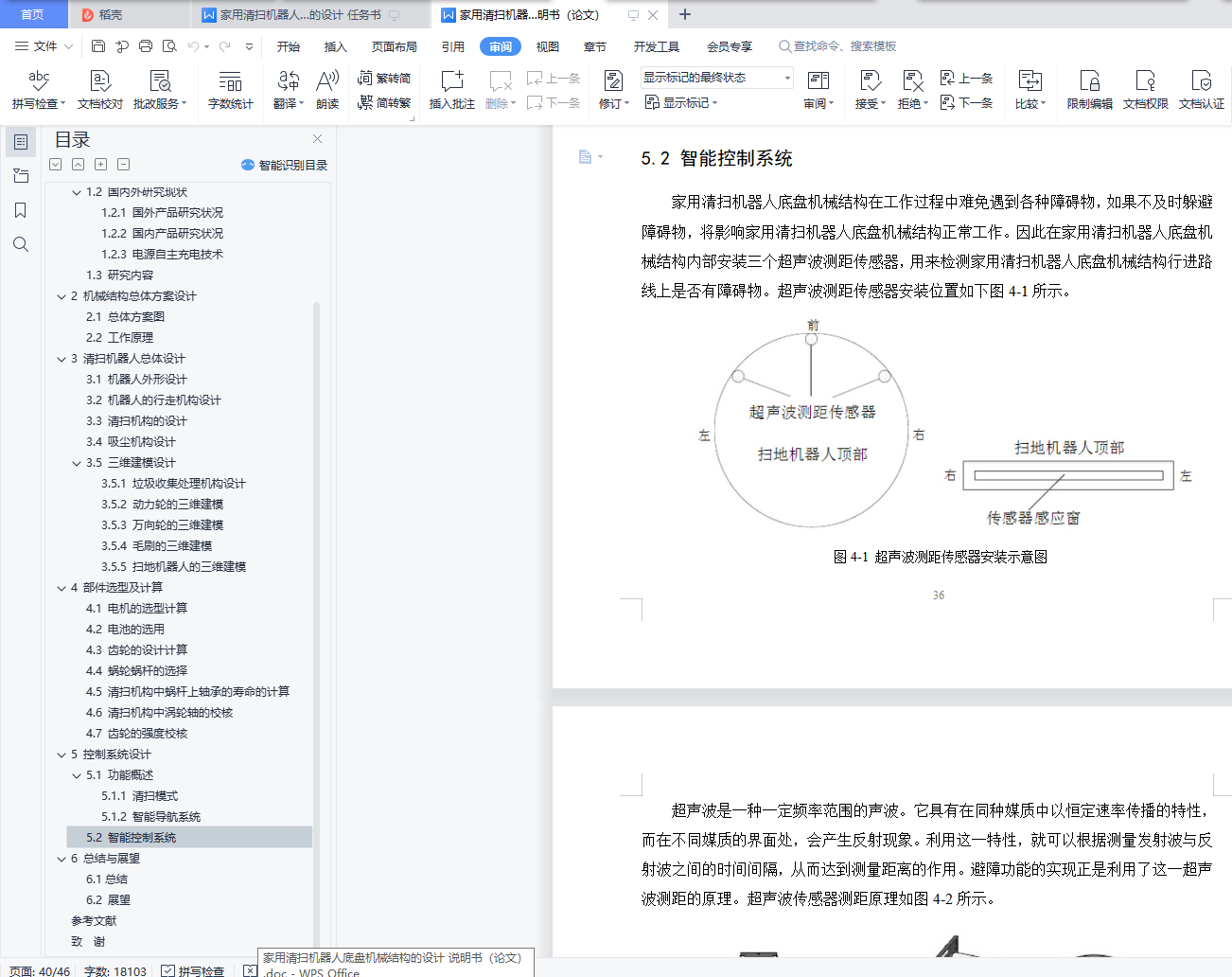
5.2 智能控制系统
6 总结与展望
6.1总结
6.2 展望
参考文献
致 谢