基于MATLAB虚拟仿真的四杆机构运动分析
摘 要
在工程领域中,四杆机构是一种被广泛应用的传动机构。对四杆机构进行设计时,我们需要对其进行运动分析,得到运动过程中的杆的各个参数。应用计算机软件MATLAB对四杆机构进行运动学分析,可以轻松得到四杆机构在运动过程中,各杆的运动参数的曲线图。
本论文研究内容为:
(1)对四杆机构进行运动学分析,分析其角位移、角速度和角加速度,并对其进行数学描述。
(2)利用对四杆机构的数学描述的结果,用MATLAB/simulink对四杆机构进行数值型的仿真。
(3)运用MATLAB/simulink中的SimMechanics 动态仿真工具构建四杆机构模型并对其仿真。
(4)通过仿真分析从动杆的瞬时角速度、瞬时角加速度、角位移变化等数据。
(5)对比基于MATLAB的两种仿真方法。
通过本文的研究,提供了用MATLAB对四杆机构进行运动学分析的方法。
【关键词】四杆机构 MATLAB 仿真
Motion analysis of four-bar mechanism based on MATLAB virtual simulation
Abstract
In the field of engineering, four-bar mechanism is a widely used transmission mechanism. When designing the four-bar mechanism, we need to analyze its motion and get the parameters of the bar in the process of motion. By using the computer software MATLAB to analyze the kinematics of the four-bar mechanism, it is easy to get the curves of the motion parameters of the four-bar mechanism in the process of motion.
The research content of this paper is as follows:
(1) The kinematics of the four-bar mechanism is analyzed, and its angular displacement, angular velocity and angular acceleration are analyzed.
(2) Based on the results of mathematical description of four-bar mechanism, the numerical simulation of four-bar mechanism is carried out with MATLAB / Simulink.
(3) The four-bar mechanism model is built and simulated by using the dynamic simulation tool of SimMechanics in MATLAB / Simulink.
(4) The data of instantaneous angular velocity, instantaneous angular acceleration and polar angle of driven rod are analyzed by simulation.
(5) Compare the two simulation methods based on MATLAB.
Through the research of this paper, the method of kinematic analysis of four-bar mechanism with MATLAB is provided.
【Key words】four bar linkage MATLAB simulation
目 录
1 绪论 (1)
1.1 本文研究的目的意义 (1)
1.2 四杆机构的发展与应用 (1)
1.3 本文研究的主要内容 (2)
2 平面四杆机构运动学分析 (3)
2.1 四杆机构自由度的计算 (3)
2.2 角位移分析 (3)
2.3 角速度分析 (3)
2.4 角加速度分析 (3)
2.5 计算仿真前四杆机构的初始参数值 (4)
3 平面四杆机构的MATLAB仿真 (6)
3.1 平面四杆机构的数值型模块仿真 (6)
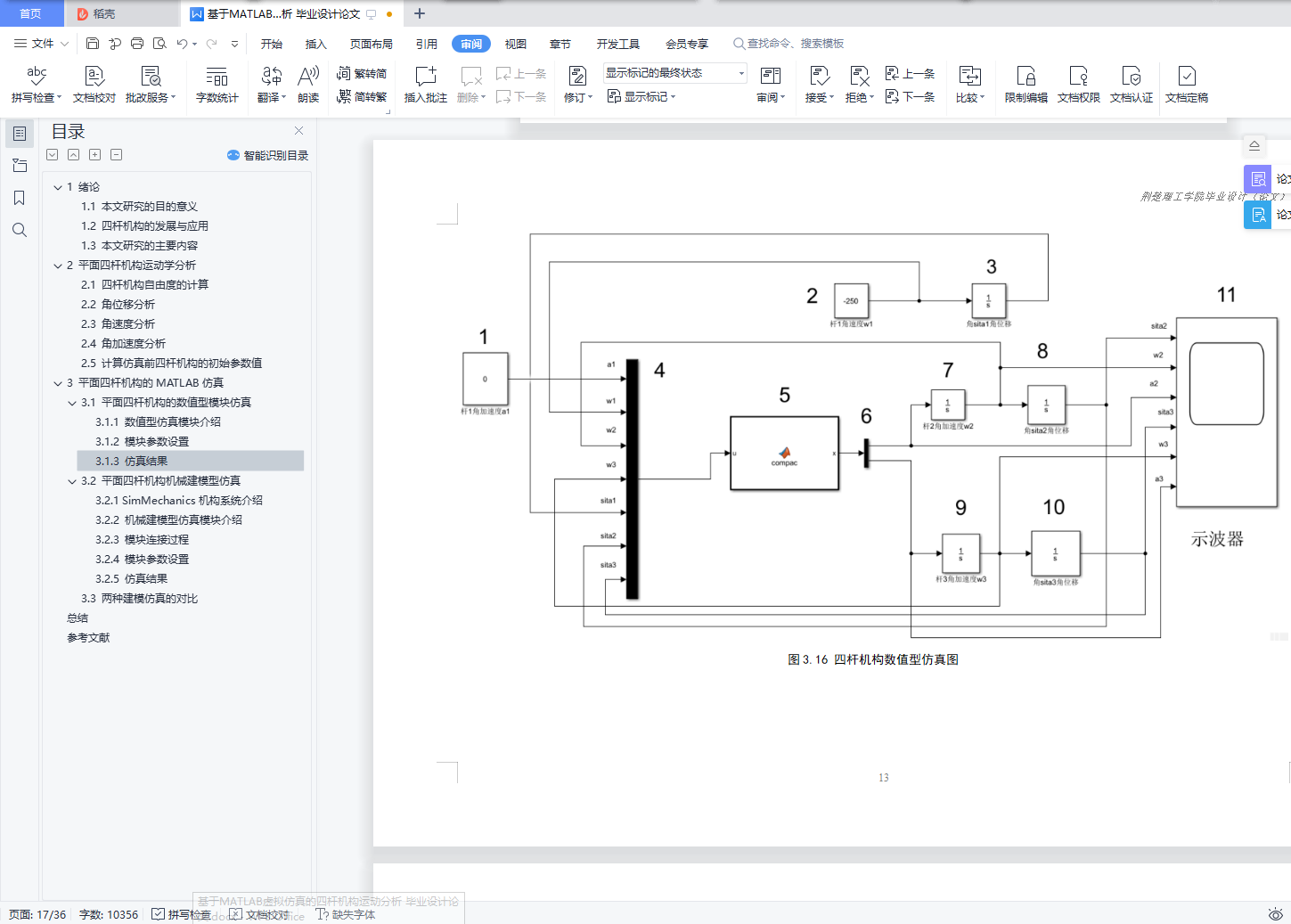
3.1.1 数值型仿真模块介绍 (6)
3.1.2 模块参数设置 (7)
3.1.3 仿真结果 (11)
3.2 平面四杆机构机械建模型仿真 (15)
3.2.1 SimMechanics机构系统介绍 (15)
3.2.2 机械建模型仿真模块介绍 (15)
3.2.3 模块连接过程 (16)
3.2.4 模块参数设置 (20)
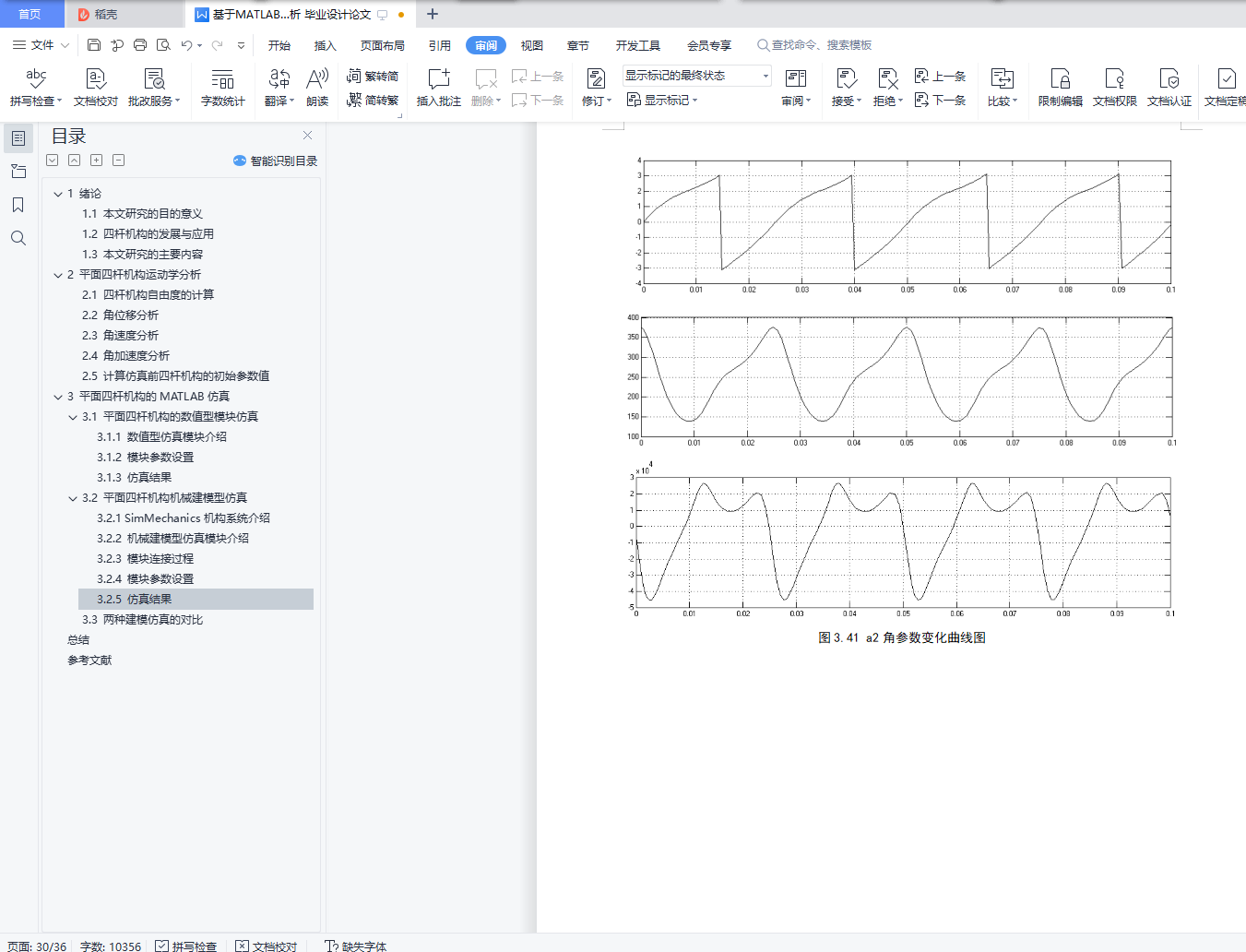
3.2.5 仿真结果 (23)
3.3 两种建模仿真对比 (28)
总结 (29)
参考文献 (30)